隱身目標點跡融合探測跟蹤方法設計
2021-04-30 07:24:50劉博平燕瑞超
電子設計工程 2021年7期
賀 賀,劉 通,劉博平,朱 寧,燕瑞超
(中國船舶工業系統工程研究院,北京 100094)
隱身目標是指雷達反射截面積(RCS)低于或遠遠小于正常目標反射面積的目標,RCS 可以達到1 m2或更小。在當代海戰場面臨反輻射導彈、低空突防、隱身技術和電子對抗等威脅的背景下,針對該類隱身目標探測的重要性已逐步凸顯,對艦載傳感器的綜合探測性能提出了更高的要求,成為亟待解決的問題[1-2]。
隨著計算機技術、通信技術的發展,現代戰爭已成為高科技的信息戰爭,戰爭中存在著海量的數據需要進行實時處理,且信息表現形式多樣,信息數量巨大,信息關系復雜,以及信息處理所要求的及時性,對作戰系統的信息處理能力都提出了非常高的要求。戰場態勢處理要求能盡快地發現各類目標并進行跟蹤,指揮中心才能夠實時、準確地做出決策。如何才能有效地探測并處理各方傳來的數據,成功提取目標特征,從而獲得快速、準確的目標信息是整個戰爭獲勝的關鍵[3-4]。
當下裝備的各型雷達中,廣泛應用的是航跡融合技術,然而各雷達經過數據處理后得到的航跡會丟失大量的原始信息,對于上述隱身目標來講,由于其RCS 較小,雷達可檢測到的回波信息本就有限,因此便導致了無法在正常的檢測門限下對其進行準確探測和穩定跟蹤。為偵查到該類隱身目標,雷達必須設置較低的觀測門限,以獲得目標的探測信息,然而降低門限則會造成虛假目標的增多,對作戰的指揮決策造成很大影響[5-6]。因此,從作戰使用的需求及發展前景來看,迫切需要采取針對性措施對原有的目標信息提取及融合方法進行改進,增強對隱身小目標的探測和數據處理能力,提高艦載組網雷達的生存能力,縮短作戰反應時間,提升作戰系統的整體作戰性能。
1 隱身目標細微特征提取
隱身目標的細微特征是相對于目標的基本特征而言,對其回波信號更深刻和細微的數學及物理描述,包括空域、時域、頻域、極化域等內容,可以更加全面地捕獲和反映隱身目標的特性。目標特征提取越詳細,對于后期隱身目標的快速建航和穩定跟蹤越有利[7-8]。
隱身目標回波信號的細微特征提取都是遵循對采樣信號的某種變換,將信號之間的特征進行明顯的區分,從而實現信號的分類識別,因而是相互關聯、相互滲透的[9]。該文采用瞬時自相關和數字中頻的綜合手段,基于短時分析,充分利用信號所攜帶的信息,對雷達脈沖信號進行脈內細微特征的提取[10],研究對象包含常規信號、線性調頻、頻率編碼、相位編碼等幾種信號。
首先對信號進行瞬時自相關運算,任意載波為正弦的雷達信號,都可以表示為:

其中,A(t)是信號幅度,f0是信號載頻,ω(t)是頻率調制量,φ0是初始相位,φ(t)是信號的瞬時相位,則信號的瞬時頻率為,該瞬時頻率是信號的調制特征之一。
雷達信號經過采樣量化后得到:
其中,m為延遲間隔,且m>0。可見,瞬時自相關僅與延遲間隔m和由于匹配頻率調制引起的相位差有關。因此,瞬時相位和瞬時頻率為:
一般情況下,受器件的限制,fs常為fmax的5~10倍,因此m只能取1 或者2。如此小的m值會使得用于相關計算的采樣點之間過于靠近,此時噪聲的相關性會導致算法在低信噪比時性能急劇下降。通過對arctan(·)函數的擴展,可以將θ(n,m)取值范圍擴大到[0,2π)。
為了進一步抑制噪聲對瞬時頻率提取的干擾,對n和n+m之間的采樣點作滑動平均處理,以式(12)所示的平均瞬時頻率作為第n點的瞬時頻率:

至此,長度為N的信號被映射為包含隱身目標脈內細微特征的N-2m+1 的平均瞬時頻率序列。
2 點跡融合跟蹤方法設計
該文針對隱身目標的回波特點,在航跡融合前先對雷達探測到的原始點跡信息進行提取,并對數據進行空間配準和量測坐標系的統一。如果雷達回波數據包含目標多普勒速度,則采用外推法進行時間配準,利用時空對準后的測量信息進行點跡融合,利用融合后的點跡進行航跡起始和關聯,進而完成航跡濾波更新,輸出最終航跡跟蹤結果。如果雷達回波數據不包含目標多普勒速度,則根據各雷達測量值的時標進行排序,依次利用各雷達的測量值進行航跡起始和關聯,完成航跡濾波更新,并輸出最終航跡跟蹤結果。點跡融合跟蹤方法設計流程如圖1所示。

圖1 艦載組網雷達點跡融合跟蹤流程圖
2.1 點跡預處理
各傳感器對目標進行探測,收集各自偵察到的雷達點跡信息,并對其進行時空對準。由于各傳感器探測到的點跡信息均是以自身為原點的坐標系下的數值,而點跡融合需要在統一的融合坐標系下進行,因此,需要通過坐標轉換將各傳感器的量測數據統一轉換到以融合中心為原點的坐標系下,即完成對各雷達點跡信息的空間對準[11]。由于不同傳感器的掃描周期、采樣間隔、以及采集數據的起始時間并不一致,導致了各傳感器在工作時的時間不同步,此時需采用時間對準技術將多部傳感器的時間對準到統一的時間基準上,通常是以融合中心所在平臺的時間作為基準。常用的時間對準方式有多項式插值法、外推法[12]。
2.2 點跡關聯
雖然各雷達的點跡在經過了時間和空間對準等預處理算法后進行了初步對準,但是由于各雷達之間存在不同的系統誤差、探測精度等原因,同一時刻探測到的目標位置信息在同一坐標系下呈現團狀,且大致分布在真實值附近,因此在點跡時空對準之后,仍需要進行多部雷達的點跡關聯[13]。點跡關聯主要利用不同雷達所觀測的同一目標的點跡位置的相似性,完成同一目標在不同雷達的同一時刻所獲得的點跡的相關判斷。對雷達的點跡數據進行點跡與點跡之間的高準確率關聯判斷,是點跡融合需要解決的一個重要問題。有效利用多雷達點跡的全方位相關性,并且獲得高準確率的關聯結果,對于增強點跡的檢測和判斷性能,以及提高航跡質量具有可觀的價值,也是點跡融合技術中的一個難點[14]。當下常用的點跡關聯方法有聚類法、最近鄰方法等。
2.3 點跡融合跟蹤
當若干個雷達點跡經過關聯處理后判斷為同一目標的點跡,則將這些點跡信息進行融合處理。常用的點跡融合跟蹤方法有兩類,第一類是點跡數據壓縮合并方法,第二類是點跡數據串行處理方法[15]。
1)點跡數據的壓縮合并
點跡數據的壓縮合并是指將多部雷達在同一時間點、針對同一目標所探測到的點跡數據進行壓縮,合并成一個點跡數據,常用的壓縮合并算法是根據各個雷達點跡在最后融合估計值中的最優權值系數進行最優加權融合,最終得到更加精確的點跡信息[16]。
點跡合并前首先要對點跡進行互聯處理,在多目標情況下常采用最近鄰域法確定互聯點跡。對已經確認的互聯點跡數據,可用最小二乘估計法進行點跡合成。
其中,Z是觀測向量,H是已知系數矩陣,R是觀測誤差矩陣。對組網雷達點跡數據合成的最小二乘估計為:

點跡數據的壓縮合并處理過程就是對數據的求精處理過程。一方面,數據求精可以起到對點跡數據的稀釋作用,另一方面,也可以提高點跡質量。點跡的質量越高,目標跟蹤后期點跡和航跡的配對正確性也就越高,從而大大提高了目標跟蹤的維持精度[17]。
2)點跡數據的串行處理
點跡數據的串行處理是將多部雷達的數據進行組合,形成類似于單部雷達的點跡數據流,進而提高點跡數據率,同時也可以提高跟蹤精度[18],點跡串行處理示意圖如圖2 所示。
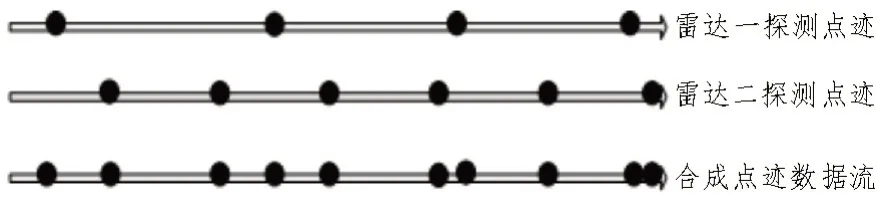
圖2 點跡串行處理示意圖
選擇何種點跡融合方法應根據具體情況而定。若所探測目標沒有徑向速度,則選擇點跡串行處理方法,既避免了融合系統結構的復雜化,又提高了點跡的數據率;若所探測目標具有徑向速度,則點跡串行處理方法不可用,通常選取點跡壓縮合并方法。最后,根據點跡融合后得到的融合點跡信息,進行航跡關聯、航跡起始、以及航跡的濾波更新,并輸出最終的航跡跟蹤結果,完成對隱身目標的跟蹤。
3 仿真效果驗證
3.1 點跡串行處理方法
設定如下仿真場景:目標做勻速直線運動,初始位置為[90 km,90 km],速度為[-200 m/s,-200 m/s]。兩部雷達的脈沖重復間隔均為1 ms,掃描周期為4 s,掃描圈數為180 圈。兩部雷達的點跡測量距離誤差為75 m,角度誤差為0.4°。雷達對目標的發現概率為0.85,虛警率為10-6。采用點跡串行處理方法,得到航跡起始距離的仿真結果如圖3 所示,航跡起始距離的均值統計如表1 所示,由表可知,點跡串行融合處理算法相對于雷達一的可檢測信噪比提高:,相對于雷達二提高1.01 dB。
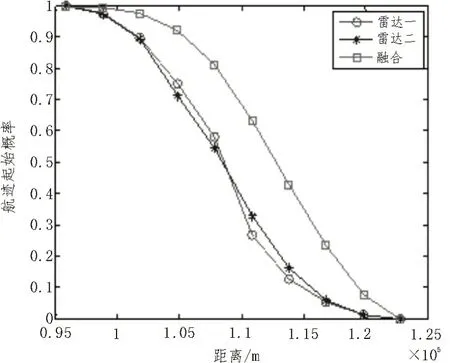
圖3 串行處理航跡起始距離
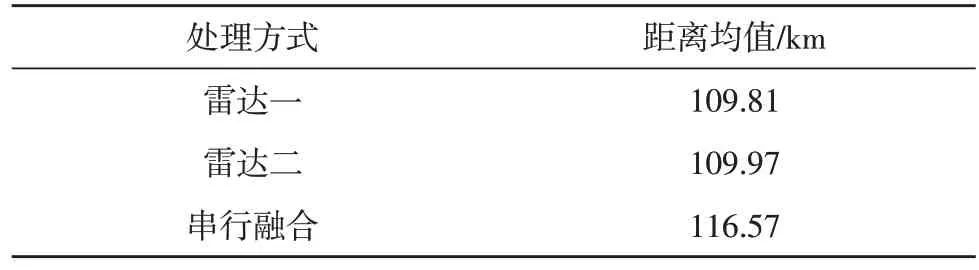
表1 航跡起始距離均值(串行融合)
3.2 點跡壓縮合并方法
設定如下仿真場景:目標做勻速直線運動,初始位置為[90 km,90 km],速度為[-200 m/s,-200 m/s]。兩部雷達的脈沖重復間隔1 ms,掃描周期4 s,掃描圈數為180 圈。兩部雷達的點跡測量距離誤差為75 m,角度誤差為0.4°。雷達對目標的發現概率為0.85,虛警率為10-6。采用并行壓縮合并的方法進行點跡融合,得到航跡起始距離的仿真結果如圖4所示。航跡起始距離的均值統計如表2 所示,由該表可知,點跡并行融合算法相對于雷達一的可檢測信噪比提高,相對于雷達二提高1.10 dB。
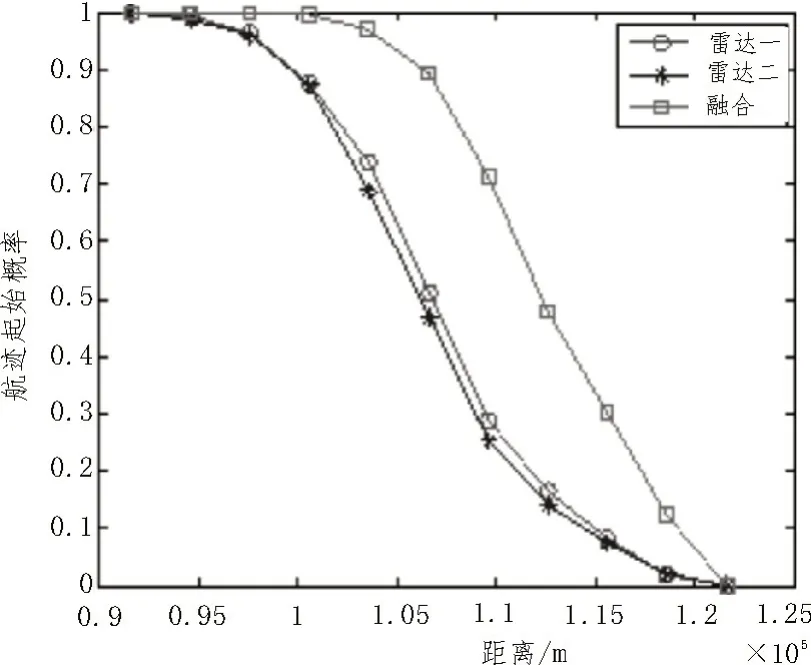
圖4 點跡壓縮合并航跡起始距離
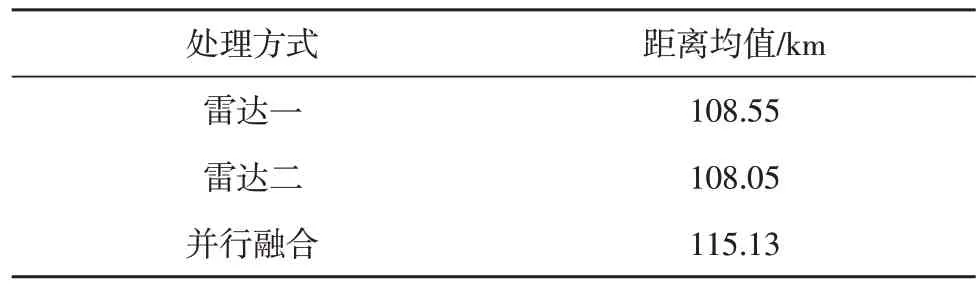
表2 航跡起始距離均值(并行融合)
由仿真效果圖3 和圖4 可知,相對于單一的航跡融合技術而言,雷達組網系統的點跡融合技術利用多部雷達的原始點跡信息,提高了雷達檢測的信噪比,加快了目標航跡的起始速度,提高了航跡的維持時間及穩定性,可以有效提高對隱身目標的探測及跟蹤性能。
4 結束語
該文對雷達探測到的回波細微特征進行有效提取并運用到隱身小目標的探測中,對原有的單純基于航跡融合的數據處理方法進行了改進,保證了對隱身目標的正常航跡起始和連續跟蹤,提高了組網雷達對弱小目標、隱身目標的探測性能,使得艦載組網雷達具備更頑強的生命力,增強了作戰系統對戰場態勢感知的靈敏度,為作戰指揮提供了更加清晰準確的目標信息,滿足了新一代軍用艦船的發展及作戰使用的需求,對提高實際作戰效能具有重要意義。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
當代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
