聯合儲庫用自動運行物料搬運系統
2021-05-04 03:53:12李勝德常中龍趙麗媛
起重運輸機械 2021年7期
關鍵詞:系統
李勝德 常中龍 趙麗媛
北京起重運輸機械設計研究院有限公司 北京 100007
0 引言
隨著科技的發展,越來越多的自動化、智能化應用場景遍布社會各個角落,機器人餐廳,自動化車間已不再是停留在概念階段,而是已經付諸實施加以應用。工廠的自動化進程也在快馬加鞭的進行著。作為工廠內的物料搬運設備,也需要適應形勢的發展,適應工廠的自動化進程,加之環保的日趨嚴格,聯合儲庫用自動運行物料搬運系統需求強烈。
1 聯合儲庫
聯合儲庫是環保嚴格要求下物料非露天儲存的常用形式,通常聯合儲庫將兩種以上物料,均存放在一個儲庫內,物料用隔墻進行隔離區分,聯合儲庫便于存儲和調配物料進行生產配比,對濕粘等物料性能有一定的改善作用。聯合儲庫與堆棚物料存儲方式相比,具有單位面積儲量大的優勢,并且易于管理,聯合儲庫在水泥企業已應用非常廣泛。
2 自動運行物料搬運系統的組成和功能
物料搬運系統是聯合儲庫內的核心設備,負責搬運物料或投料到指定位置,通常做點到點的搬運動作,并由此形成密集的矩陣式物料分布結構,進而有效管理聯合儲庫內物料存放。自動運行物料搬運系統不同于普通的物料搬運系統,主要在于能夠結合廠內其他設備,根據運行指令自動運行,減少操作人員數量,降低操作人員成本,提高了物料搬運自動化水平。
自動物料搬運系統由機械部分和電氣部分組成,機械部分又涵蓋了各分支機構,電氣部分負責驅動各機構運行,并提供必要的檢測和保護,其中自動電控是物料搬運系統的控制中樞,結合儲庫工藝進行自動控制,自動運行物料搬運系統組成和功能簡圖見圖1。
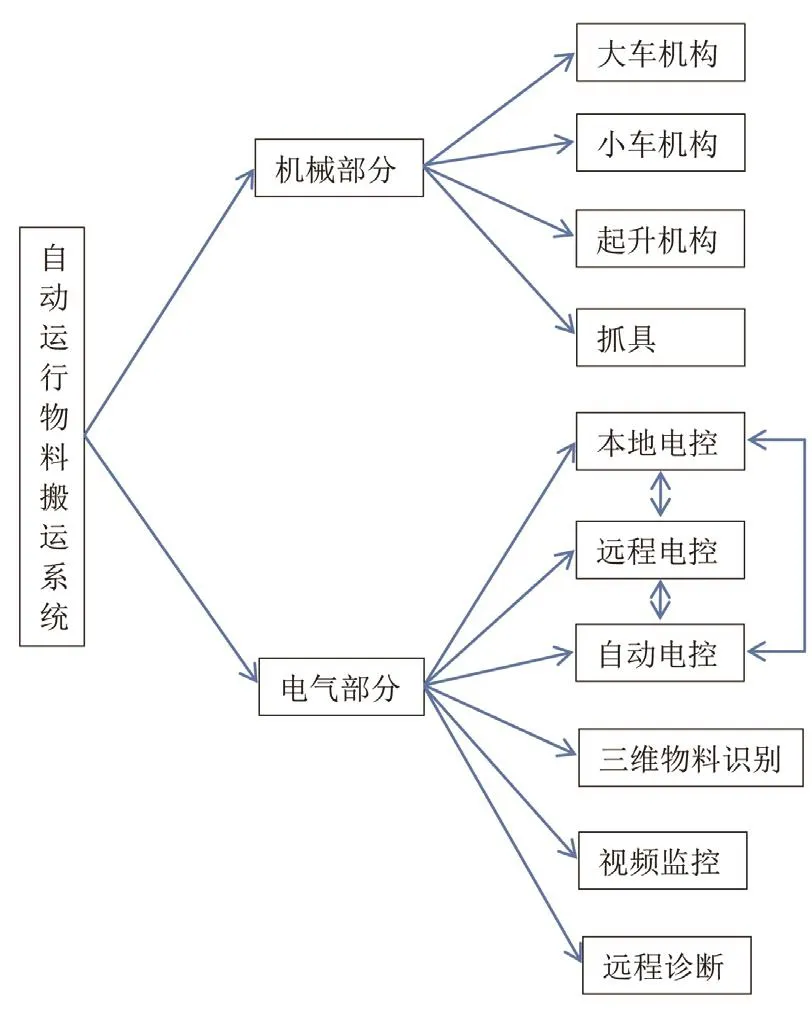
圖1 自動運行物料搬運系統組成和功能簡圖
2.1 機械部分
物料搬運系統機械部分主要由大車機構、小車機構、起升機構和抓具構成。大車機構主要由主梁、端梁、大車三合一驅動部件組成;小車機構主要由小車架、稱量部件、小車三合一驅動部件組成;起升機構主要由起升電機、起升減速器、閉合電機、閉合減速器、鋼絲繩卷筒等組成。機械部分保障了物料搬運系統的主體架構,承載著各種載荷的磨礪,保障著物料搬運系統的順暢運行。
抓具是物料搬運系統中重要的機械部件,一個靈活、穩定、可靠的抓具,保障著整個物料搬運系統的有效運轉,抓具可根據不同應用場合進行物料適配性選用。聯合儲庫用自動運行物料搬運系統采用了四繩機械雙瓣抓斗,抓斗底刃與邊刃材質采用了高強度耐磨材料,以增加抓斗的耐用性,同時,滑輪組配有導板和鋼絲繩保護罩,以防鋼絲繩跳槽,進一步保障了抓斗使用中的穩定性。
2.2 電氣部分
電氣部分是物料搬運系統的重要組成部分,主要分為本地電控、遠程電控、自動電控、三維物料識別、視頻監控、遠程診斷。本地電控主要由本地移動司機室、電控房、電氣檢測元件、電氣保護元件等組成;遠程電控主要由遠程操作臺、遠程電控柜、遠程傳輸設備、起重機視頻監控等組成;自動控制主要由自動控制臺、服務器、WCS、自動傳輸設備、起重機視頻監控等組成。
1)本地電控
本地電控是物料搬運系統運行的基本保障,其中移動司機室進行了保溫設計,采用鋼骨架、雙層鋼化玻璃鋁塑門窗,三面安裝玻璃窗,加裝冷暖空調,并具有滅火器、應急照明、火災報警裝置,移動司機室安裝在起重機主梁下方,有較好的視野,司機能夠觀察到聯合儲庫內物料布置情況,司機室內集成了本地操作臺、人機交互界面,司機可就地準確操作起重機;電控房設計為保溫防塵形式,可適應高低溫環境,自動調節溫度防止凝露,電控房安裝在起重機走臺上,電控房內集成了PLC、變頻器等驅動起重機運行的所有需要的元器件,起重機上各種電氣保護元件和電氣檢測元件信號返回電控房接入本地電控。本地電控具有抓具防搖擺功能,有效降低了抓具的擺動幅度,減少了故障率,提高了物料搬運系統運行穩定性。
2)遠程電控
遠程電控可設置在聯合儲庫附近的地面控制室,控制室內設有遠程操作臺和人機交互界面,功能可選擇與本地操作臺相同,司機可在地面控制室內遠程操作起重機;地面控制室內設置有遠程電控柜,連接DCS系統,同時架設有工控機可對起重機進行稱量統計;遠程傳輸設備連接本地電控和自動電控,傳輸信號和視頻等;地面控制室配置起重機視頻監控系統,實時采集起重機運行圖像,保證司機能及時觀察到聯合儲庫內起重機運行情況。遠程電控的設置,保障了操作人員的工作環境,避免了粉塵、噪聲等對人的損害,方便了操作人員的生活,也可一人操作多臺設備,節省了人力資源。
3)自動電控
自動電控可設置在集中控制室內,配備有自動控制臺,控制臺通過自動傳輸設備建立與本地電控和遠程電控的通訊,控制臺架設有服務器,服務器安裝有WCS自動控制系統軟件,集中控制室操作人員通過軟件進行起重機自動運行的控制,自動控制臺配置有起重機視頻監控顯示器,實時顯示起重機運行狀況,保障集中控制室操作人員能及時觀察到聯合儲庫內起重機運行情況并進行控制。
聯合儲庫用自動運行物料搬運系統為本地、遠程、自動多點控制起重機運行,多點之間進行了必要的聯鎖控制,保障起重機在任一時刻只允許一個控制點工作,并且每一控制點均裝設有緊急斷電裝置。
4)三維物料識別
物料識別是物料搬運系統能自動運行的重要因素之一,通過激光物料識別設備對物料進行識別,配合起重機位置系統形成物料的精準三維坐標,自動電控獲取三維坐標信息,提供給WCS進行數據處理,WCS將數據進行排列分析,最終獲得物料抓放點位置信息,并發送給本地電控,控制物料搬運系統自動運行;同時對三維物料識別數據采用計算機高級語言進行編程,將數據以圖形界面形式進行顯示,便于自動操作人員直觀了解聯合儲庫內物料分布情況,進行控制指令的預設置。三維物料識別圖形界面如圖2所示。
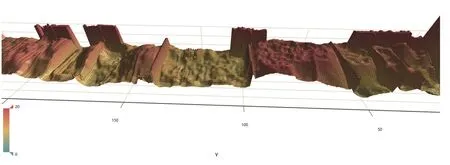
圖2 三維物料識別圖形界面
5)視頻監控
物料搬運系統通常配備有視頻監控系統,視頻監控系統由大車視頻裝置、小車視頻裝置、車載移動網絡、地面無線轉接、地面控制站組成。每臺物料搬運設備配有多個監控點,可監控物料搬運設備運行情況,監控抓具運行情況。視頻通過無線裝置進行傳輸,便于安裝和布置,也便于維護。監控畫面可在遠程電控、自動電控進行顯示,也可接入廠內監控系統進行全局監控。
6)遠程在線故障診斷
遠程在線故障診斷只需引入互聯網接口到起重機控制室的VPN路由器或通過5G網絡直接連接VPN路由器,售后服務人員即可在任何地方通過計算機網絡對發生故障的現場起重機進行遠程診斷,快速判斷故障位置和狀態,配合業主方便地進行現場維護和故障處理,極大地保障了自動運行物料搬運系統可靠運行。遠程在線故障診斷如圖3所示。

圖3 遠程在線故障診斷
3 應用情況
聯合儲庫用自動運行物料搬運系統已成功應用于多個項目,自動運行情況良好,同時適用于多種物料抓取。物料適用于水泥行業聯合儲庫內的砂巖、鐵礦、頁巖等高密度物料的抓取,也可抓取粘土、石灰石、原煤、石膏、雙摻石灰石、混合材料等低密度物料,或進行多物料不同比重的粗配比上料。自動運行物料搬運系統根據抓具的不同可拓展適應多種物料,可用于生物質發電行業的散秸稈或打包秸稈;也可用于環保垃圾發電行業的生活垃圾抓取和投放,燃料焚燒后的灰渣抓取等;其他如糧食、紙卷、鋼卷、煤礦、固體廢棄物、工業危廢等物料均可采用自動運行物料搬運系統進行搬運,提高物料搬運系統的自動化水平,提高工廠的自動化水平。
4 結語
隨著聯合儲庫用自動運行物料搬運系統不斷應用于各個工廠,工廠內大幅減少了操作人員的數量,為企業節省了較多人力成本和負擔,大幅提高了工廠物料搬運設備的自動化水平,適應了工廠智能化、自動化的發展趨勢。聯合儲庫用自動運行物料搬運系統已獲得用戶的高度認可,并申請國家專利進行知識產權保護。聯合儲庫用自動運行物料搬運系統適應了自動化發展的趨勢和需求,但同樣需要維護和保養,完備的維護保養,將會發揮出自動運行的優勢,同時,也需要人員的監督管理,觀察設備運行情況,保障設備安全運行。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
