平衡重式叉車防側翻模型預測控制研究
2021-05-06 08:02:06李嘉誠唐希雯陳無畏
中國機械工程 2021年8期
關鍵詞:模型
夏 光 李嘉誠 唐希雯 張 洋 陳無畏
1. 合肥工業大學汽車工程技術研究院,合肥,230009 2. 國防科技大學電子對抗學院,合肥,230037 3. 合肥工業大學汽車與交通工程學院,合肥,230009
0 引言
近年來叉車在港口、建筑、工程建設等領域起到了不可替代的作用,我國叉車銷量逐年遞增,近十年我國叉車銷量均超過全球銷量的30%[1-2]。
叉車作為搬運機械,其作業環境相對復雜,經常需要在狹小空間內實現轉向,容易發生側翻事故。叉車發生側翻將直接危及駕駛人員的生命安全并造成經濟損失。據統計,叉車發生事故的原因主要有側翻、剮蹭以及碰撞,而由于側翻導致的事故占比最高,達到42%[3-5]。關于防止叉車側翻的研究是具有現實意義的。
RINCHI等[6]基于MATLAB/Simulink建立了電動叉車模型并提出了一種車輛主動安全控制系統,該系統通過載荷傳感器以及坡道識別傳感器對叉車裝載貨物的重心進行估計,判斷重心在行駛平面的投影是否處于安全區域內,通過限制電動輪的最大速度和加速度確保叉車的穩定性,當不能保證車輛穩定性時則停止運行并發出警報,該系統能夠有效防止叉車由于貨物較重或質心偏移導致的翻車。SPOONER等[7]發明了一種用于平衡重式叉車載重預警系統,當叉車裝載貨物超出預定值時,系統通過電磁閥控制門架前傾角度以及貨叉上升的高度。LEMERLE等[8-9]考慮叉車輪胎剛度和阻尼特性對叉車在不平路面行駛穩定性的影響并進行了參數優化和仿真,研究了高速轉彎工況下四輪叉車的穩定性。國內學者對叉車防側翻的研究處于起步階段,夏光等[10]通過叉車主動后輪轉向(ARS)與直接橫擺力矩控制(DYC)的解耦控制消除ARS與DYC之間的干涉耦合,提升了叉車的狀態跟蹤和操縱穩定性。劉顯貴等[11]提出基于橫擺角速度和質心側偏角的叉車主動后輪轉向系統自適應線性二次高斯(LQG)控制策略進行叉車動態安全穩定性仿真計算,提高叉車的穩定性。
由于叉車屬于低速非道路車輛,前后軸距較小,裝載貨物時速度的驟變易引起縱向的俯仰傾翻,因此很難直接應用其他車輛的基于ABS的防側翻控制策略。本文根據叉車特殊的底盤結構設計了一種液壓支撐油缸,為車身提供側向支撐力;提出基于零力矩點的叉車行駛狀態劃分策略和支撐方式,并進行了仿真和實車試驗。
1 平衡重式叉車轉向側翻機理
平衡重式叉車具有前驅后轉向的底盤結構,車身與前驅動橋固連,與后轉向橋之間通過鉸接的方式連接[4-5,12-13],如圖1所示。

圖1 車身與后橋結構示意圖Fig.1 Structure of the body and rear axle
平衡重式叉車正常行駛時其三點支撐平面為ABE,車身可沿前橋中心與后鉸接點的連線EF進行左右擺動。這種擺動保證了叉車在凹凸不平路面的通過性,在車輪發生離地側傾時,車身不會隨之發生嚴重側翻,但當叉車高速轉向或駕駛員誤操作時,由于車身快速側傾,載荷急劇向外側轉移,導致內側車輪離地,最終造成嚴重的側翻事故。
2 平衡重式叉車防側翻執行機構
通過對叉車結構的分析可知,在側傾過程中,當側傾軸線為EF時,叉車依舊處于穩定狀態;當叉車繼續側傾,導致側傾軸線E端點向外偏移,載荷向外側轉移,此時叉車側翻可能性逐漸增大,因此考慮在叉車側傾導致載荷向外側轉移時,額外對車身添加防側傾力矩。本文設計了一種液壓支撐油缸,當叉車有側翻可能性時,液壓支撐油缸為車身提供側向支撐力以減小叉車側傾,防止叉車側翻。液壓支撐油缸的安裝方式如圖2所示。

圖2 液壓支撐油缸安裝示意圖Fig.2 Installation diagram of the hydraulic support cylinder
在叉車正常行駛時,控制電磁閥開度全開,此時液壓支撐油缸上下兩腔連通。當叉車通過凹凸不平路面時,由于電磁閥節流孔作用,液壓缸的活塞運動速度變緩慢,通過緩沖閥吸收壓力,可以起到一定的柔性支撐作用,增加了叉車行駛中的平順性。在叉車進行高速緊急轉向或駕駛員誤操作時,根據叉車不同的行駛狀態控制輸出不同占空比的PWM信號控制電磁閥開度大小,改變油缸的阻尼力,為車身提供液壓支撐力。液壓支撐油缸實車安裝如圖3所示。

圖3 液壓支撐油缸實車安裝圖Fig.3 Actual installation diagram of hydraulic support cylinder
3 叉車動力學模型及側翻評價標準
3.1 車輛二自由度模型
車輛二自由度線性模型能夠反映車輛的側向和橫擺運動,如圖4所示。
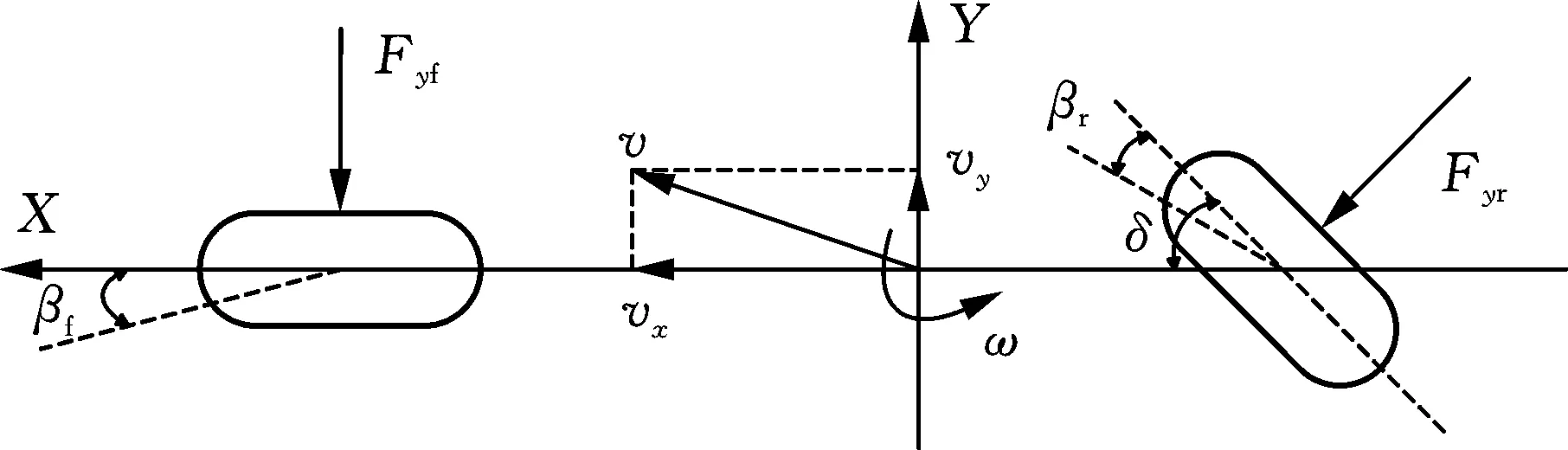
圖4 后輪轉向叉車二自由度模型Fig.4 2-DOF model of the rear-wheel steering forklift truck
沿Y軸的側向力平衡方程為
m(ay+vxω)=Fyrcosδ+Fyf
(1)
式中,m為叉車整車質量;δ為后輪轉角;vx為叉車沿X軸方向的速度;ω為叉車橫擺角速度。
沿Z軸的側向力平衡方程為
(2)
式中,Iz為整車繞Z軸的轉動慣量;a、b分別為前后輪到質心距離。
前后輪側向力
(3)
式中,kyf、kyr分別為前后輪的側偏剛度。
側向加速度
(4)
前后輪側偏角
(5)
3.2 車輛側傾三自由度模型
車輛二自由度模型并不能反映叉車車身的側傾情況,根據國內某叉車廠自主研發的3 t系列平衡重式叉車的實際參數,經適當簡化得叉車側傾三自由度模型,如圖5所示。
沿Y軸的側向力平衡方程為
(6)
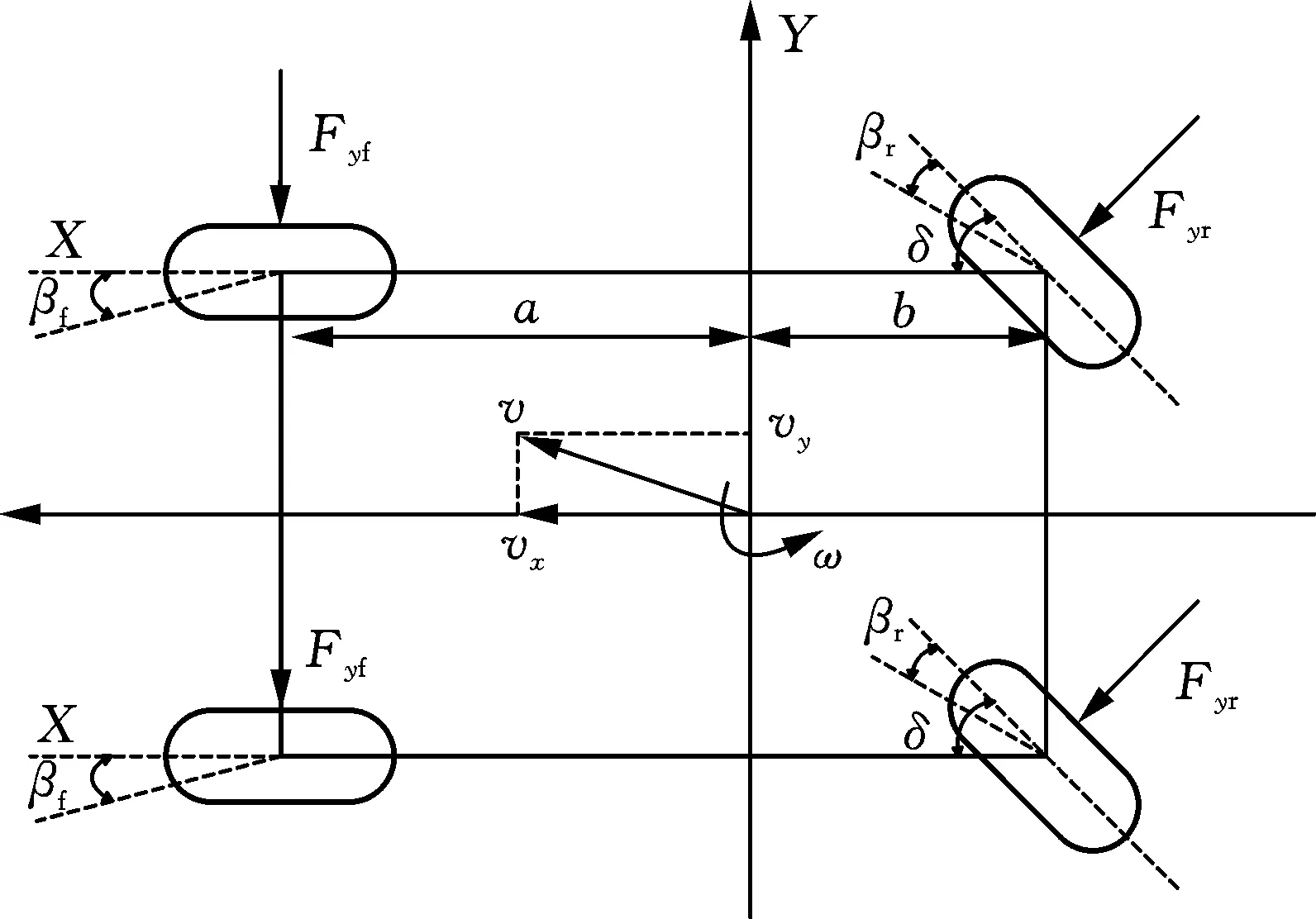
(a) 橫向動力學模型

(b) 側傾動力學模型圖5 平衡重式叉車側傾三自由度模型Fig.5 3-DOF model for counter balanced forklift truck
式中,ms為車身質量;φ為車身繞鉸接點的側傾角度;hs為車身質心到鉸接點距離。
沿Z軸的側向力平衡方程為
(7)
沿X軸的側向力平衡方程為
(8)
(9)
(10)
式中,Ixeq為整車繞X軸的轉動慣量;F為油缸支撐力;c為油缸到鉸接點的距離;Ix為車身繞X軸的轉動慣量;i為通過支撐油缸的常閉電磁閥電流;f(i)為在電流i下支撐油缸的支撐力;imax為允許通過油缸電磁閥的最大電流。
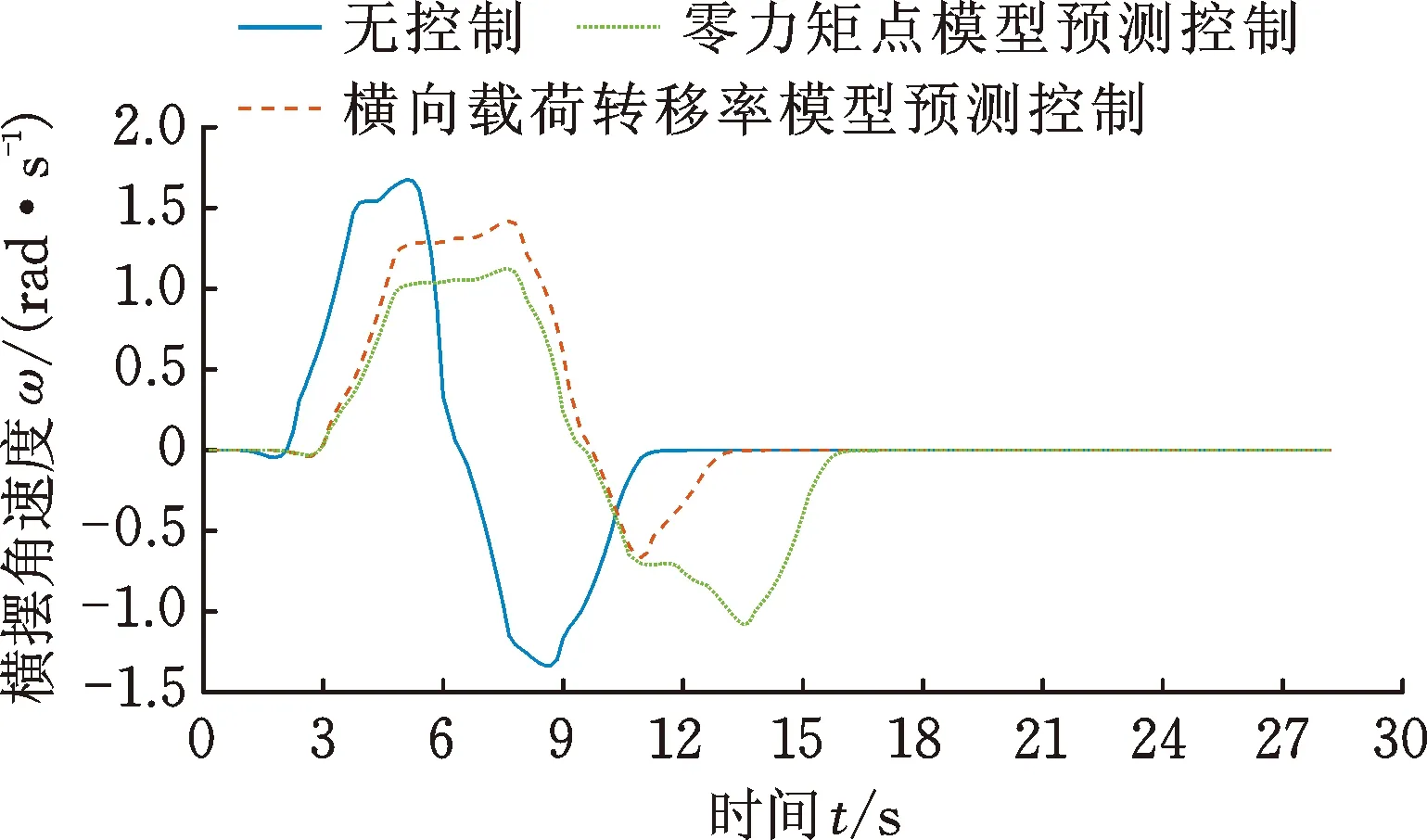
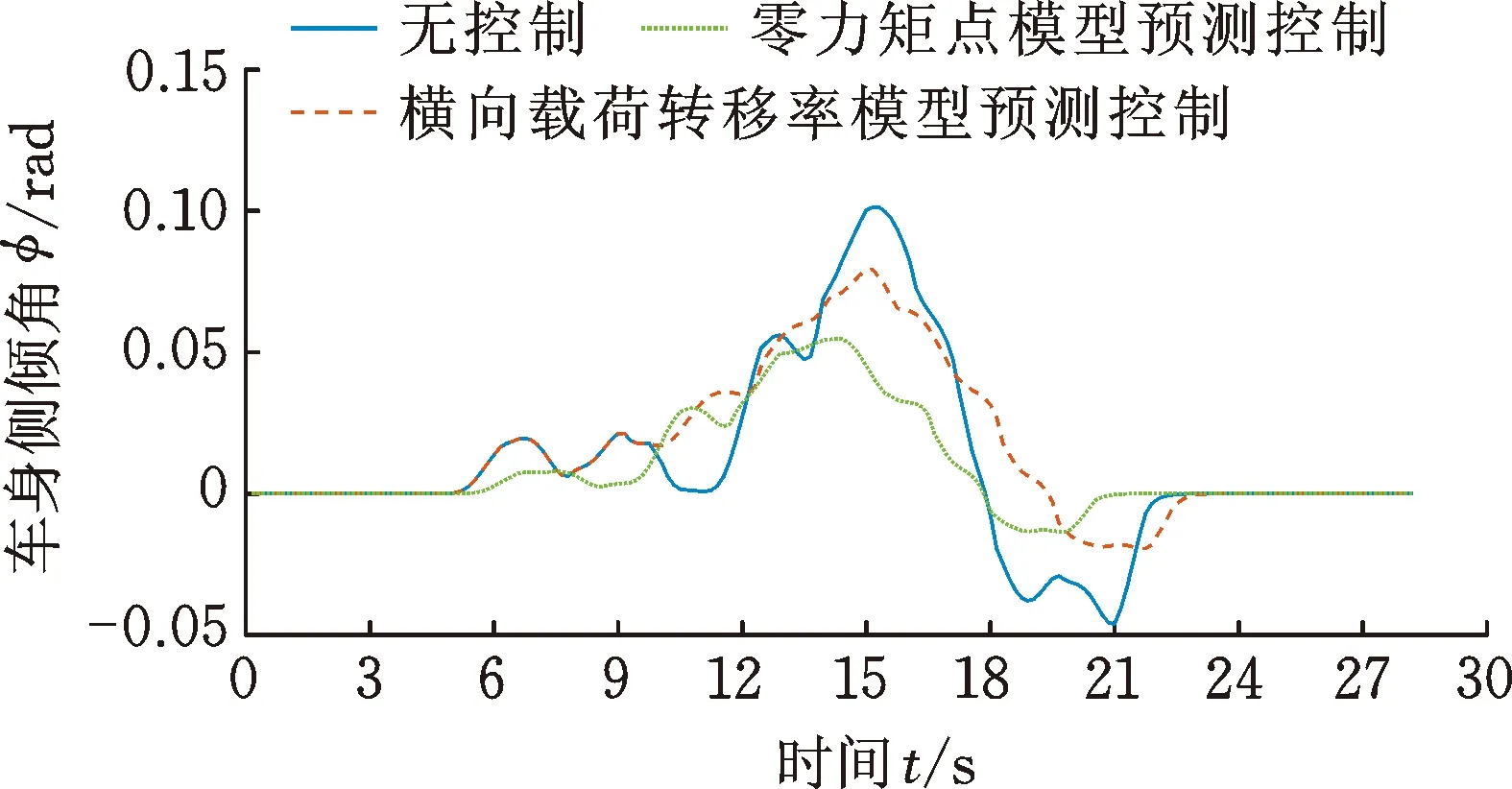
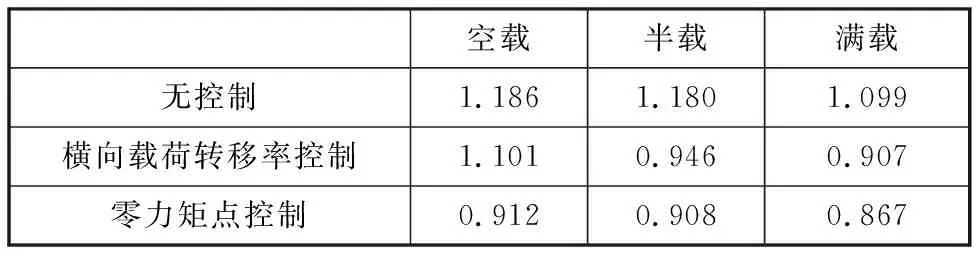
當0 (11) (12) (13) 叉車在側傾過程的車身側傾角和橫向載荷轉移率能夠反映車身的側傾程度[14-15],但當叉車經過凹凸不平路面時,會導致以上兩種評價指標出現誤差,影響叉車仿形功能,因此采用零力矩點作為評價指標。 4.1.1評價指標計算 零力矩點(ZMP)是指在地面上的某一可變點,使得車輛系統各部分對該點重力矩和慣性力矩的合力矩為零[16-18]。零力矩點能夠時刻反映車輛在運行過程中的側傾情況,并對整個側傾以及側翻過程中車輛的行駛狀態給予準確評價。定義車輛零力矩點的公式為 (14) 式中,mi、ri和Mi分別為系統中各部分的質量、在對應坐標系中的矢量位置以及慣性力矩,i=1代表車身,i=2代表底盤;Mz為零力矩點位置處的凈力矩;g為重力加速度。 針對平衡重式叉車零力矩點的計算,可將叉車車身替代為在車身聯合質心位置的質點,如圖6所示。 圖6 叉車零力矩點示意圖Fig.6 Schematic diagram of forklift zero moment point 圖6中P1、P2點分別為車身和底盤質心位置,綜合圖6和式(13)并將車身與底盤對P點的合力矩分別投影到X、Y、Z坐標軸中可得 (15) 在研究叉車橫向失穩時,只需要考慮零力矩點的側向分量Y坐標與車輛支撐平面的關系,因此將叉車底盤和車身參數代入式(14)可得 (16) 令τx=0,得 (17) 式中,τx為合力矩投影到X坐標軸的分量;yzmp為零力矩點在Y坐標軸的分量;h為車輛質心到地面高度。 4.1.2評價指標閾值確定 本文將液壓支撐油缸作為叉車防側翻執行機構,能夠在一定程度上擴大其支撐平面,而零力矩點作為側傾程度的評價指標與叉車側傾過程的車身支撐平面進行比較。結合圖7分析可得,在叉車安全行駛時,其支撐平面為ABE,當車身繼續側傾時,液壓油缸鎖止為車身提供支撐力,支撐平面擴大為ABGF。據此設定零力矩點的閾值,將叉車側傾分為安全行駛、危險可控和臨界側翻3個階段。 圖7 叉車支撐平面Fig.7 Forklift support plane 當零力矩點沿Y軸分量|yzmp| (18) 當|yzmp|>l2時,叉車即將發生側翻,因此得到叉車臨界側翻閾值如下: (19) 式中,a、b、d分別為叉車前后軸距和輪距。 圖8 防側翻控制系統結構Fig.8 Anti-rollover control system structure 控制策略如圖8所示。①安全行駛階段。當yzmp小于安全閾值時,液壓油缸處于自由狀態,不提供支撐力。②危險可控階段。當yzmp處于安全閾值和側翻閾值之間時,通過模型預測控制對油缸支撐力進行調節,防止叉車進一步側傾。③臨界側翻階段。當yzmp大于側翻閾值時則控制油缸為車身提供最大支撐力。 模型預測控制是通過被控對象的線性離散模型對系統控制量進行優化求解,使得系統趨近于目標函數[19]。 4.2.1預測模型 (20) 對于施加控制的叉車,其運動特性如下所示: (21) 其中控制量u=FT。當叉車處于危險工況時,油缸支撐力F能夠改善叉車車身姿態,因此對支撐力F的確定尤為重要,利用式(20)與式(21)作差得線性時變系統模型: (22) 由式(19)和式(21)得到基于液壓支撐力控制的叉車狀態方程: (23) 為得到模型預測算法所適用的離散模型,對式(23)進行歐拉一階差商法離散化處理,得到離散方程[20]: (24) Ad=I+TsABd=TsBCd=C 式中,I為單位矩陣;Ts為采樣時間。 利用模型預測算法在控制時需要對控制量進行約束,因此需要引入增量模型并將狀態變量x,寫為ξ(k)=[x(k)u(k-1)]T,可得狀態空間方程: (25) 由式(24)可知k時刻系統的輸出,因此通過迭代計算在預測時域Hp內的j時刻系統的輸出: (26) 將所有時刻系統輸出用矩陣表達: Y(k)=μξ(k)+τΔU(k) (27) 4.2.2滾動優化 在yzmp介于安全閾值和側翻閾值之間時,此時叉車側傾處于危險可控階段,為了防止叉車側翻,系統需要時刻對油缸支撐力F進行調節。控制過程中因此設定目標函數為 J=(R(k)-Y(k))TQ(R(k)-Y(k))+ΔUT(k)PΔU(k) (28) 式中,R(k)中的元素為期望橫擺角速度、側傾加速度以及側傾角;Q、P分別為輸出誤差和控制增量誤差權重系數。 4.2.3約束條件 在模型預測控制中,控制量以及系統狀態變量需要滿足叉車的實際物理限制,對于控制系統,若輸出的控制量超出實際執行機構的執行能力,則直接導致系統失穩。控制系統約束的一般形式如下: (29) 4.2.4反饋矯正 系統在運行過程中累計的誤差會對系統控制效果產生影響,模型預測算法能夠對系統進行反饋調節,根據狀態量的實際測量值進行矯正。由前文分析可知,系統狀態變量和控制變量均能夠根據公式計算,估算狀態變量能使系統誤差進一步減小。 設系統工作時實時的狀態估算方程為 (30) 結合式(19)得觀測器方程: (31) 在系統狀態確定時可通過對觀測器反饋矩陣O的設計實現觀測狀態與實際狀態的誤差保持在一定范圍內。 本文基于MATLAB/Simulink建立防側翻控制器,將yzmp與叉車側傾過程中支撐平面的變化作為其行駛狀態劃分的依據,在叉車側傾過程中利用模型預測控制算法進行油缸支撐力的調節,提高叉車的橫向穩定性。控制器如圖9所示。 圖9 防側翻控制系統模型Fig.9 Anti-rollover control system model 圖10 歐標工況路線Fig.10 Route of European standard working condition 傳統靜態穩定性試驗已不能準確模擬叉車在復雜工況下的穩定性,因此根據EN 16203:2014標準(以下簡稱“歐標”)進行平衡重式叉車動態穩定性仿真與試驗[4]。由第4節零力矩點分析可知,當叉車空載時其車身質心位置靠后,叉車行駛安全閾值最小。為了進一步驗證,分別在空載、半載和滿載仿真工況下仿真,歐標工況試驗道路如圖10所示。 叉車在L1直線段加速,以不低于90%最高車速到達L2并轉向,試驗過程中叉車任意部分不能與邊線發生接觸。叉車左轉和右轉工況一致,本文只對右轉工況進行仿真和試驗。 為了保證叉車的動力學輸出滿足實際工況,需要同時對系統輸出和控制量進行約束,根據系統約束的一般行駛和文獻[21]可得叉車側向加速度與地面附著系數μ滿足: ay≤|μg| (32) 根據文獻[5]對叉車側翻極限時的橫擺角速度和側傾角進行約束: -12°≤φ≤12°-2.1 rad/s≤ω≤2.1 rad/s 控制器采樣時間T=0.01 s,預測時域Hp=25,控制時域Hc=5。 為驗證零力矩點作為叉車側傾過程的評價指標的可行性,選用橫向載荷轉移率作為對比,仿真過程中記錄車身側傾角和橫擺角速度,如圖11~圖16所示。 圖11 歐標工況下空載車身側傾角(仿真)Fig.11 No-load body roll angle under European standardworking condition (simulation) 圖12 歐標工況下空載車輛橫擺角速度(仿真)Fig.12 No-load vehicle yaw rate under European standard working condition (simulation) 圖13 歐標工況下半載車身側傾角(仿真)Fig.13 Half-load body roll angle under European standard working condition(simulation) 圖14 歐標工況下半載車輛橫擺角速度(仿真)Fig.14 Half-load vehicle yaw rate under European standard working condition(simulation) 圖15 歐標工況下滿載車身側傾角(仿真)Fig.15 Full-load body roll angle under European standard working condition(simulation) 圖16 歐標工況下滿載車輛橫擺角速度(仿真)Fig.16 Full-load vehicle yaw rate under European standard working condition(simulation) 仿真數據對比如表1和表2所示。由表1和表2可知,在空載、半載以及滿載工況下,與無控制相比,橫向載荷轉移率模型預測控制的車身側傾角峰值最大減小28.7%,橫擺角速度峰值最大減小35.1%;零力矩點模型預測控制的車身側傾角峰值最大減小51.2%,橫擺角速度峰值最大減小38.8%。仿真結果表明,零力矩點作為評價指標效果更加顯著,驗證了零力矩點作為叉車側傾評價標準具有可行性。 表1 仿真車身側傾角峰值Tab.1 Simulated peak value of body roll angle rad 表2 仿真車輛橫擺角速度峰值 為進一步驗證控制策略的可行性,本文設計了基于飛思卡爾MC9S12X128單片機的防側翻控制器,主要包括陀螺儀傳感器信號采集、最小系統和驅動電磁閥輸出3個部分。 試驗車輛為國內某叉車廠自主研發的3 t系列平衡重式叉車。防側翻控制系統傳感器以及執行機構實車安裝位置如圖17所示。試驗工況與仿真工況保持一致,如圖18所示。 圖17 傳感器及執行機構安裝位置Fig.17 Installation location of sensors and actuators 圖18 歐標工況下實車試驗Fig.18 Real vehicle test under European standard working condition 由于系統處于開發試驗階段,為保證試驗過程中駕駛人員安全,在叉車左右兩側均安裝防護架。試驗時對比叉車側傾姿態如圖19所示。 (a) 空載工況無控制 (b) 空載工況零力矩點模型預測控制圖19 歐標工況下車身姿態對比Fig.19 Comparison of body postures under European standard working condition 由圖19可知,系統不進行控制時,在高速轉向工況下,叉車內側前輪明顯離地且外側防護架與地面直接接觸,即叉車會發生側翻;當系統進行防側翻控制時,叉車左前輪未明顯離地且外側防護架不與地面接觸,此叉車不會發生側翻。過程中記錄車身側傾角和橫擺角速度。 (1)空載工況。由仿真結果可知,空載是叉車發生側傾最嚴重的工況,此時叉車聯合質心集中在車身后部,而叉車的三角形支撐平面在車身后部分布較少,因此空載工況試驗對系統穩定性和可行性要求更高。實驗結果如圖20、圖21所示。 圖20 歐標工況下空載車身側傾角(試驗)Fig.20 No-load body roll angle under European standard working condition (test) 圖21 歐標工況下空載車輛橫擺角速度(試驗)Fig.21 No-load vehicle yaw rate under European standard working condition (test) (2)半載工況。平衡重式叉車在作業過程中多數為半載工況,此時叉車聯合質心位于車身中部,叉車接地載荷分布相對均勻,半載試驗工況具有實際工程意義。實驗結果如圖22、圖23所示。 圖22 歐標工況下半載車身側傾角(試驗)Fig.22 Half-load body roll angle under European standard working condition (test) (3)滿載工況。滿載工況下,平衡重式叉車聯合質心位于前軸附近,此時后輪接地載荷最小,而液壓支撐油缸位于車身和后轉向橋之間,因此滿載工況能夠驗證液壓支撐油缸安裝位置的可行性。實驗結果如圖24、圖25所示。 圖23 歐標工況下半載車輛橫擺角速度(試驗)Fig.23 Half-load vehicle yaw rate under European standard working condition (test) 圖24 歐標工況下滿載車身側傾角(試驗)Fig.24 Full-load body roll angle under European standard working condition (test) 圖25 歐標工況下滿載車輛橫擺角速度(試驗)Fig.25 Full-load vehicle yaw rate under European standard working condition (test) 由圖20~圖25可知,在空載、半載和滿載工況下,與無控制相比,橫向載荷轉移率模型預測控制與零力矩點模型預測控制均能減小叉車在高速緊急轉向時的側傾,但零力矩點模型預測控制對車身側傾幅度和橫擺幅度改善更明顯。試驗峰值數據如表3和表4所示。 表3 車身側傾角試驗峰值Tab.3 Test peak value of body roll angle rad 表4 車輛橫擺角速度試驗峰值Tab.4 Test peak value of vehicle yaw rate rad/s 由表3和表4可知,空載工況的叉車車身側傾幅度最大,滿載工況的車身側傾幅度最小;空載工況下,與無控制相比,零力矩點模型預測控制能夠將車身側傾角峰值最大減小64.4%,橫擺角速度峰值最大減小23.1%,橫向載荷轉移率模型預測控制能夠將車身側傾角峰值最大減小50.6%,橫擺角速度峰值最大減小7.2%。試驗結果表明,零力矩點作為叉車側傾評價指標能夠對不同階段的叉車側傾進行準確表征,叉車防側翻模型預測控制能夠減小車身側傾幅度,與仿真結果相似,驗證了基于零力矩點的叉車防側翻模型預測控制的可行性。 (1)為避免平衡重式叉車在高速轉向時發生側翻,提出了一種基于零力矩點位置的叉車行駛狀態劃分方法。將零力矩點的側向分量與叉車的支撐面進行對比,并考慮側傾過程叉車支撐面的動態變化,將叉車狀態劃分為安全行駛、危險可控以及臨界側翻3個階段。 (2)設計了以液壓支撐油缸作為執行機構的控制系統,以基于零力矩點的模型預測控制進行防側翻控制器設計。通過對油缸支撐力進行約束和調節來改善叉車行駛姿態,提高橫向穩定性。 (3)進行了歐標工況仿真與實車試驗,結果表明,基于零力矩點模型預測控制的平衡重式叉車防側翻控制策略可大幅降低平衡重式叉車高速緊急轉向工況下的車身側傾概率,有效防止叉車側翻,提高了平衡重式叉車的穩定性與主動安全。4 防側翻控制系統設計
4.1 叉車側翻評價指標




4.2 模型預測控制





5 仿真驗證及分析

5.1 仿真工況設置
5.2 仿真參數設置
5.3 仿真結果分析






6 實車試驗
6.1 控制器設計與試驗條件


6.2 實車試驗與結果分析









7 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38網絡安全與數據管理(2022年1期)2022-08-29 03:15:20導航定位學報(2022年4期)2022-08-15 08:27:00中學生數理化·中考版(2022年8期)2022-06-14 06:55:24新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36成都醫學院學報(2021年2期)2021-07-19 08:35:14新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24光學精密工程(2016年6期)2016-11-07 09:07:19