
諧波電流對(duì)電驅(qū)動(dòng)總成振動(dòng)噪聲的影響分析
2021-05-07 12:47:56李基芳何鵬林孫守富
汽車電器 2021年4期
關(guān)鍵詞:振動(dòng)
李基芳,何鵬林,孫守富,劉 勇
(中汽研汽車檢驗(yàn)中心(天津)有限公司,天津 300399)
《新能源汽車產(chǎn)業(yè)發(fā)展規(guī)劃 (2021-2035)》指出,發(fā)展新能源汽車是中國(guó)從汽車大國(guó)邁向汽車強(qiáng)國(guó)的必由之路,是應(yīng)對(duì)氣候變化、推動(dòng)綠色發(fā)展的戰(zhàn)略舉措。中國(guó)一直堅(jiān)持純電驅(qū)動(dòng)戰(zhàn)略取向,新能源汽車產(chǎn)業(yè)發(fā)展取得了輝煌的成就。電驅(qū)動(dòng)總成是各類新能源汽車的動(dòng)力核心,電驅(qū)動(dòng)總成一般由電機(jī)控制器(以下簡(jiǎn)稱“控制器”)、電機(jī)和減速器組成。其中控制器是電驅(qū)動(dòng)系統(tǒng)的控制中心,將動(dòng)力電池輸出的直流高壓電逆變成頻率連續(xù)可調(diào)的三相交流電,驅(qū)動(dòng)、控制電機(jī)運(yùn)行。永磁同步電機(jī)以其成本低、可靠性高、功率密度大及效率高等諸多優(yōu)勢(shì)[1],成為新能源汽車市場(chǎng)上的主流產(chǎn)品。發(fā)展至今,振動(dòng)噪聲性能已經(jīng)成為評(píng)價(jià)電驅(qū)動(dòng)總成優(yōu)劣的重要指標(biāo)之一[2]。
1 永磁同步電機(jī)諧波電流分析
1.1 諧波電流頻率分布
控制器逆變電路大多采用三相橋式正弦脈寬調(diào)制(SPWM)[3],逆變過(guò)程中,除產(chǎn)生基波電流外,同時(shí)會(huì)產(chǎn)生大量的諧波電流。控制器為定子繞組星型連接的永磁同步電機(jī)供電時(shí),交流電流在頻域上分布如下[4]。
1)基波頻率f0,與電機(jī)轉(zhuǎn)速和極對(duì)數(shù)均成正比。
2)諧波頻率 (6n±1),n=1,2,3……,如5f0、7f0、11f0、13f0等。
3)與開(kāi)關(guān)頻率相關(guān)的諧波頻率 (kfh±nf0),fh為開(kāi)關(guān)頻率、k為不等于3的整數(shù)倍的整數(shù)。
諧波電流對(duì)電機(jī)性能產(chǎn)生很多影響,比如發(fā)熱量增多、轉(zhuǎn)矩脈動(dòng)、電磁振動(dòng)噪聲變大等[5]。
1.2 諧波電流對(duì)振動(dòng)噪聲的影響
徑向電磁力是電機(jī)電磁振動(dòng)噪聲的主要激勵(lì)源[6],其由定子和轉(zhuǎn)子間氣隙磁場(chǎng)相互作用而產(chǎn)生,通過(guò)定子齒傳遞到電機(jī)殼體。因此,電機(jī)殼體表面的振動(dòng)噪聲與電磁力息息相關(guān)。
定、轉(zhuǎn)子間氣隙磁場(chǎng)包括定子基波磁場(chǎng)、定子諧波磁場(chǎng)、定子諧波電流產(chǎn)生的主/諧波磁場(chǎng)、轉(zhuǎn)子基波磁場(chǎng)及轉(zhuǎn)子諧波磁場(chǎng)等。上述磁場(chǎng)之間相互作用產(chǎn)生一系列隨時(shí)間和空間而變化的徑向電磁力。
與定子第v次諧波電流有關(guān)的主要徑向電磁力頻率為(fv±f0)[7],其中fv是第v次諧波電流頻率。
如第5次、第11次諧波電流產(chǎn)生反向旋轉(zhuǎn)磁勢(shì),所以徑向電磁力頻率為 (fv+f0);如第7次、第13次諧波電流產(chǎn)生正向旋轉(zhuǎn)磁勢(shì),所以徑向電磁力頻率為 (fv-f0)。即:第5次和第7次諧波電流產(chǎn)生的徑向電磁力頻率為6f0,第11次和第13次諧波電流產(chǎn)生的徑向電磁力頻率為12f0。
1.3 諧波電流抑制方法
對(duì)于開(kāi)關(guān)頻率附近的高次諧波,通常采用改變控制器逆變拓?fù)浣Y(jié)構(gòu)、優(yōu)化PWM策略、增加輸出濾波器等方式降低。對(duì)于低次諧波電流,主要從改進(jìn)電機(jī)的本體結(jié)構(gòu)和控制策略兩方面抑制[8]。
改進(jìn)電機(jī)本體結(jié)構(gòu)主要包括斜槽斜極、磁路設(shè)計(jì)、繞組分布等。這些方法一般在電機(jī)的設(shè)計(jì)初期結(jié)合電機(jī)性能指標(biāo)、加工工藝、制造成本等因素綜合考慮,對(duì)于產(chǎn)品的設(shè)計(jì)和加工要求很高。
應(yīng)用控制策略改善逆變器死區(qū)時(shí)間和管壓降等因素引起的諧波電流,主要方式包括電壓補(bǔ)償法、坐標(biāo)變換法等。軟件控制方法抑制諧波電流易于實(shí)現(xiàn)、適應(yīng)性強(qiáng),廣泛用于電機(jī)振動(dòng)噪聲優(yōu)化、轉(zhuǎn)矩脈動(dòng)改善等。
第v次諧波電流在三相靜止坐標(biāo)系下是交流分量,但是在第v次諧波dq旋轉(zhuǎn)坐標(biāo)系下將變成直流分量。通過(guò)對(duì)應(yīng)旋轉(zhuǎn)坐標(biāo)系變換,分別將擬抑制的諧波電流變換成直流分量并提取,根據(jù)提取到的直流分量電流計(jì)算諧波電壓補(bǔ)償量,然后將諧波電壓補(bǔ)償量反饋到系統(tǒng)中,實(shí)現(xiàn)對(duì)諧波電流的抑制。
2 電驅(qū)動(dòng)總成電流及振動(dòng)噪聲測(cè)試
被測(cè)電驅(qū)動(dòng)總成由8極48槽永磁同步電機(jī)、減速器和控制器組成。為了測(cè)試電機(jī)交流電流,將控制器拆除置于遠(yuǎn)離電機(jī)的位置并包覆吸聲材料,消除控制器對(duì)噪聲測(cè)試結(jié)果的影響。
試驗(yàn)在半消聲室內(nèi)的測(cè)功機(jī)臺(tái)架上進(jìn)行,測(cè)試系統(tǒng)主要包括Siemens SCM2E05數(shù)采、YOKOGAWA 701931電流傳感器、PCB 356A16加速度傳感器、GRAS 46AE傳聲器、Simcenter Testlab軟件等。
電流傳感器測(cè)試其中一相交流電流,加速度傳感器布置在電機(jī)殼體上,傳聲器分別布置在電驅(qū)總成(電機(jī)+減速器)前方、后方、左方、右方、上方,距離總成表面均為1m。試驗(yàn)照片如圖1所示,圖1中紅色圓圈標(biāo)注的是傳聲器位置。

圖1 電驅(qū)動(dòng)總成試驗(yàn)照片
試驗(yàn)工況為電機(jī)在峰值轉(zhuǎn)矩輸出狀態(tài)下,轉(zhuǎn)速由1000r/min經(jīng)15s加速到5000r/min。同步采集加速工況上述電流、振動(dòng)噪聲數(shù)據(jù)。
2.1 電流測(cè)試結(jié)果
圖2是電機(jī)其中一相交流電流的頻譜圖,由于基波頻率電流的幅值遠(yuǎn)遠(yuǎn)大于諧波電流幅值,且諧波電流之間幅值差異較大。為了便于觀察電流的頻率分布,調(diào)整電流頻譜圖的幅值范圍,圖中顯示的是幅值較大的諧波電流。

圖2 電流頻譜圖
其中①是基波電流,②~⑤分別是第5次、第7次、第11次、第13次諧波電流,8000~12000Hz之間為開(kāi)關(guān)頻率相關(guān)諧波電流。電流頻率分布與1.1所述結(jié)論吻合。
除上述諧波電流外,由于電機(jī)三相不對(duì)稱,測(cè)試相電流中還包含第2次、第3次、第4次諧波電流,但是電流幅值較小。
圖3是低次諧波電流幅值對(duì)比,其中第5次諧波電流幅值最大,明顯高于其它次諧波電流。另外隨著諧波次數(shù)的提高,電流幅值呈下降趨勢(shì)。
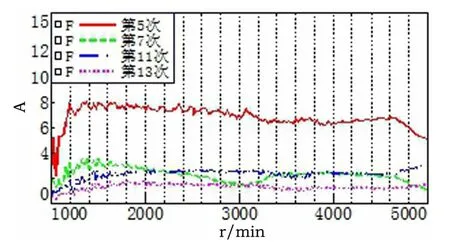
圖3 諧波電流大小對(duì)比
2.2 振動(dòng)噪聲測(cè)試結(jié)果
分析電驅(qū)動(dòng)總成振動(dòng)噪聲測(cè)試結(jié)果,其中噪聲結(jié)果為5個(gè)傳聲器測(cè)點(diǎn)的能量平均值,關(guān)注頻率范圍0~5000Hz。

圖4 電機(jī)殼體徑向振動(dòng)

圖5 振動(dòng)總值與主要階次對(duì)比
圖4是電機(jī)殼體徑向振動(dòng)頻譜圖,振動(dòng)較大的階次主要為第8階、第24階和第48階。其中,第24階振動(dòng)在測(cè)試轉(zhuǎn)速范圍內(nèi)相對(duì)較大,見(jiàn)圖5振動(dòng)總值與主要階次對(duì)比。尤其在1600~2500r/min范圍內(nèi)第24階振動(dòng)與振動(dòng)總值大小相近,是電機(jī)殼體徑向振動(dòng)的主要貢獻(xiàn)量。
圖6是5個(gè)噪聲測(cè)點(diǎn)平均值的頻譜圖,由于測(cè)試對(duì)象為包含電機(jī)和減速器的總成(控制器噪聲已屏蔽),所以頻譜圖中既有第8階、第24階、第48階等電機(jī)階次噪聲,又有減速器相關(guān)的齒輪階次噪聲(圖中黑色虛線所在的階次)。而且除個(gè)別轉(zhuǎn)速外,上述電機(jī)階次噪聲和減速器階次噪聲中沒(méi)有任何一階噪聲的能量明顯高于其它階次噪聲。也就是說(shuō),某階噪聲只在個(gè)別轉(zhuǎn)速對(duì)聲壓級(jí)具有主要貢獻(xiàn),圖7是聲壓級(jí)與主要電機(jī)階次噪聲對(duì)比。
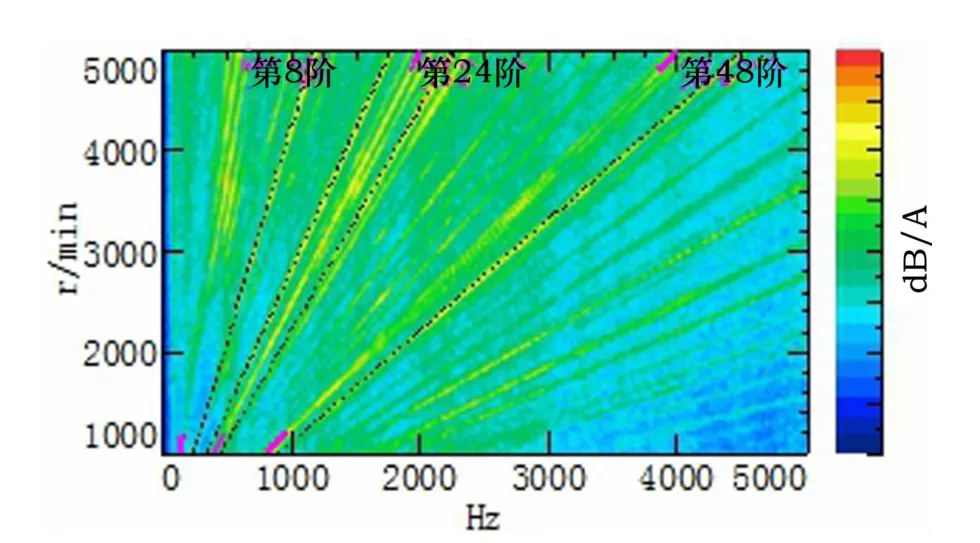
圖6 電驅(qū)動(dòng)總成噪聲頻譜圖
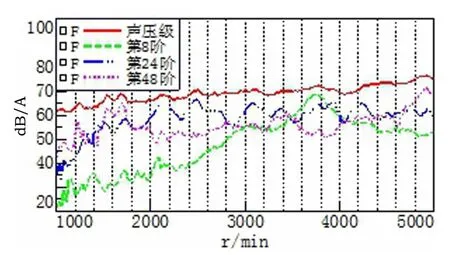
圖7 聲壓級(jí)與電機(jī)階次噪聲對(duì)比
比如,第8階電機(jī)噪聲峰值在3750r/min左右,該轉(zhuǎn)速下與聲壓級(jí)相差約3.5dB (A),對(duì)聲壓級(jí)影響最大;其它轉(zhuǎn)速遠(yuǎn)遠(yuǎn)低于聲壓級(jí),對(duì)聲壓級(jí)基本無(wú)影響。第24階電機(jī)噪聲在2100r/min、2500r/min與聲壓級(jí)相差約3dB (A),對(duì)聲壓級(jí)影響最大。第48階電機(jī)噪聲在1700r/min左右與聲壓級(jí)相差約4dB (A),對(duì)聲壓級(jí)影響最大。相對(duì)而言,第24階電機(jī)噪聲在測(cè)試轉(zhuǎn)速范圍內(nèi)幅值較大。
綜上所述,第24階振動(dòng)噪聲對(duì)被測(cè)電驅(qū)動(dòng)總成振動(dòng)噪聲影響最大。由于被測(cè)總成的電機(jī)極對(duì)數(shù)是4,所以第5次和第7次諧波電流引起的徑向電磁力是第24階振動(dòng)噪聲的激勵(lì)之一。
本文應(yīng)用1.3節(jié)中的控制策略原理,抑制第5次和第7次諧波電流,研究其對(duì)電驅(qū)動(dòng)總成振動(dòng)噪聲的影響。
3 諧波電流對(duì)電驅(qū)動(dòng)總成振動(dòng)噪聲的影響
通過(guò)控制策略抑制電流第5次和第7次諧波,重復(fù)測(cè)試本文第2節(jié)中的加速工況,對(duì)比抑制諧波電流前后的電流、振動(dòng)噪聲變化。本節(jié)對(duì)比圖中紅色實(shí)線為諧波電流抑制前的測(cè)試結(jié)果,綠色虛線為諧波電流抑制后的測(cè)試結(jié)果。
圖8是第5次和第7次諧波電流對(duì)比,由圖8可見(jiàn),第5次諧波電流幅值大幅降低、第7次諧波電流除中間轉(zhuǎn)速段外幅值也明顯降低。因此,通過(guò)控制策略達(dá)到了抑制第5次和第7次諧波電流的目的。

圖8 諧波電流幅值對(duì)比

圖9 電機(jī)殼體徑向振動(dòng)對(duì)比
圖9是電機(jī)殼體徑向振動(dòng)對(duì)比,第24階振動(dòng)幅值在1500~2900r/min、3400~5000r/min范圍內(nèi)明顯降低,振動(dòng)平均值由1.87m/s2降至0.51m/s2,振動(dòng)峰值由5.58m/s2降至1.48m/s2。
振動(dòng)總值在1600~2500r/min大幅降低而且線性度提高,印證了圖5中該轉(zhuǎn)速范圍振動(dòng)主要貢獻(xiàn)量是第24階的結(jié)論。轉(zhuǎn)速2100r/min左右的振動(dòng)峰值由6.55m/s2降至2.76m/s2,另外在3600~5000r/min振動(dòng)總值略有降低。
圖10是電驅(qū)動(dòng)總成噪聲對(duì)比,由圖可知,第24階噪聲在測(cè)試轉(zhuǎn)速范圍內(nèi)明顯降低,平均降低7.4dB (A)。聲壓級(jí)在2100r/min 和2500r/min 左右分別降低2.6dB (A)、1.8dB (A)。

圖10 電驅(qū)動(dòng)總成噪聲對(duì)比
4 結(jié)論
本文以某電驅(qū)動(dòng)總成為研究對(duì)象,測(cè)試分析諧波電流對(duì)其振動(dòng)噪聲的影響,得出以下結(jié)論。
1)電機(jī)殼體徑向振動(dòng)以電機(jī)階次振動(dòng)為主,總成噪聲既包含電機(jī)階次噪聲又包含減速器階次噪聲。其中,第24階振動(dòng)噪聲對(duì)總成的振動(dòng)和聲壓級(jí)影響最大。
2)第5次諧波電流和第7次諧波電流引起的徑向電磁力是第24階振動(dòng)噪聲的激勵(lì)源之一,通過(guò)控制策略降低了第5次和第7次諧波電流。
3)第24階振動(dòng)平均值由1.87m/s2降至0.51m/s2、振動(dòng)峰值由5.58m/s2降至1.48m/s2,第24階噪聲平均降低7.4dB (A),改善效果明顯。
4)因第24階振動(dòng)噪聲明顯改善,電驅(qū)動(dòng)總成振動(dòng)總值、平均聲壓級(jí)得到不同程度優(yōu)化。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
