
基于CAN 總線的汽車事件數據記錄系統開發方案研究
2021-05-07 12:48:08楊曦
汽車電器 2021年4期
楊 曦
(北京汽車集團越野車有限公司,北京 101300)
隨著汽車的日益普及,道路交通事故的發生越來越頻繁,道路交通傷害也已經成為威脅人類生命安全最重要的原因之一[1]。由于汽車智能化、電子化、自動化的發展與應用,車輛的行駛受到了較多電子上的干預,事故的責任界定存在很大的困難。早在20世紀70年代,美國就已經開始研發EDR (Event Data Recorder System,事件數據記錄系統)的產品[2]。汽車事件數據記錄系統EDR,俗稱“汽車黑匣子”,借鑒飛機“黑匣子”的原理,記錄車輛碰撞事件發生時的車輛信息。EDR可記錄事故時的車輛速度和行駛軌跡以及駕駛員的操作行為等數據信息,為交通事故調查、分析和重建工作提供客觀、全面、準確的數據。
汽車黑匣子EDR在交通事故認定中的重要作用,在國際上受到了越來越多的關注與應用。美國NHTSA (高速公路安全管理局)已于2006年發布EDR法規并強制實施。歐盟、日本、韓國也都頒布了相關的法規[3]。中國也于2017年發布《機動車運行安全技術條件》,要求車輛配備EDR,并于同年開始編寫EDR法規《汽車事件數據記錄系統》。本文對汽車事件數據記錄系統的開發方案進行研究。
1 EDR系統介紹
強制性國家標準《汽車事件數據記錄系統》中對汽車事件數據記錄系統(EDR)的定義是“由一個或多個車載電子模塊構成,具有監測、采集并記錄碰撞事件發生前、發生時和發生后車輛和乘員保護系統的數據功能的裝置或系統”[4]。根據標準對汽車事件數據記錄系統的定義,該系統可以是僅由一個車載電子模塊構成的滿足功能要求的裝置,也可以是由多個車載控制模塊構成的滿足功能要求的系統。
2 EDR系統開發方案
EDR系統對碰撞事件、數據記錄、EDR記錄功能、數據提取、防護性能等方面都有嚴格的要求。
1)碰撞事件:碰撞事件分為鎖定狀態與非鎖定狀態。對于鎖定狀態事件,EDR記錄的數據不可擦除或覆蓋;對于非鎖定狀態事件,EDR記錄的數據可以按照時間順序依次覆蓋。碰撞事件的觸發判斷及事件狀態的判斷均由安全氣囊控制器實現,事件信號可通過CAN總線傳輸。
2)數據來源:EDR系統需要監測、采集并記錄的數據共計60個。從數據來源分析,大部分數據與動力及安全控制相關,涉及整車多個電子控制系統,如動力相關的有:發動機管理系統EMS、防抱制動系統ABS、電子穩定性控制系統ESP;安全控制相關的有:安全氣囊控制器ACU、車身控制模塊BCM、自適應巡航系統ACC、自動緊急制動狀態AEB、輪胎壓力檢測系統TPMS;時間相關的有:主機EHC。這些數據均可通過CAN總線獲取。
3)EDR記錄功能:碰撞發生時車輛可能出現斷電的情況,EDR控制器需具備斷電保護功能,能夠完整地記錄、存儲事故發生前后的數據,并保證記錄數據的時間同步性。
4)數據提取:EDR控制器需支持UDS (Unified Diagnostic Services,統一診斷服務)診斷協議,滿足ISO14229-1,ISO15765-2要求,并可以通過數據提取設備對存儲數據進行轉譯讀取。
5)防護性能:防護性能應能滿足GB/T 30038《道路車輛電氣電子設備防護等級(IP代碼)》定義的功能狀態要求。
本文根據整車實際電子電氣架構的情況,對多種EDR系統的開發方案進行研究分析。
2.1 安全氣囊控制器集成EDR
EDR系統功能集成在安全氣囊控制器 (ACU,Airbag Control Unit)內,原理如圖1所示。源于ACU本身的數據自行記錄,源于其他控制器的數據通過CAN總線進行傳輸、ACU進行采集記錄,數據提取設備通過診斷讀取ACU存儲的數據。
1)在EDR需要監測、采集并記錄的60個數據元素中,有將近半數的數據元素來源于ACU,源于ACU的數據不需要上傳CAN總線,可以大大降低總線的負載率。
2)整車碰撞事件及狀態的判斷由ACU控制,有效地提高了數據記錄的時間準確性。
3)ACU本身因碰撞的特殊性具備斷點保護功能。
4)ACU集成EDR功能,可節約單車成本。

圖1 安全氣囊控制器集成EDR原理圖
2.2 其它控制器集成EDR
EDR系統功能集成在任意其它車載電子模塊內,即除安全氣囊控制器以外的其它控制器,原理如圖2所示 (以發動機ECU為例)。源于發動機ECU本身的數據自行記錄,源于其他控制器的數據通過CAN總線進行傳輸、控制器采集記錄,數據提取設備通過診斷讀取其它控制器存儲的數據。

圖2 其它控制器集成EDR原理圖
1)其他控制器本身不具備斷電保護,需要增加斷電保護設計以保證自身供電。
2)源于ACU的數據需要發送到CAN總線上,以供其他控制器進行采集記錄。
3)整車碰撞事件及狀態也需通過采集CAN總線的ACU信號進行判斷,可能存在信號延遲。
4)由車輛上標配的電子模塊集成EDR功能,可節約單車成本。
2.3 單獨開發EDR控制器
EDR系統功能單獨開發一個車載電子模塊,原理如圖3所示。所有要求記錄的EDR數據都通過CAN總線進行傳輸、控制器采集記錄,數據提取設備通過診斷讀取EDR控制器存儲的數據。
1)EDR控制器是一個全新開發的控制器,設計時考慮增加斷電保護設計以保證自身供電。
2)源于ACU的數據需要發送到CAN總線上,以供EDR控制器進行采集記錄。
3)整車碰撞事件及狀態也需通過采集CAN總線的ACU信號進行判斷,可能存在信號延遲。
4)開發獨立的EDR控制器,可不改變整車上已有的各車載電子模塊的功能分配,擴展性較靈活。

圖3 EDR控制器原理圖
2.4 多個控制器共同實現EDR功能
EDR系統功能分散在所有相關車載電子模塊內,原理如圖4所示。源自各控制器本身的數據自行記錄,數據提取設備通過診斷讀取所有相關控制器內存儲的數據。
1)所有控制器除ACU本身不具備斷電保護,需要增加斷電保護設計以保證自身供電。
2)所有數據如無其他需求都可以不發送到CAN總線上,可以大大降低總線的負載率。
3)整車碰撞事件及狀態也需通過采集CAN總線的ACU信號進行判斷,可能存在信號延遲,信號記錄時間無法完全保持一致。
4)由車輛上標配的電子模塊集成EDR功能,可節約單車成本。
5)多控制器共同開發EDR,對數據提取設備的提取要求較高,需將不同控制器的提取數據轉化整合為一份報告。
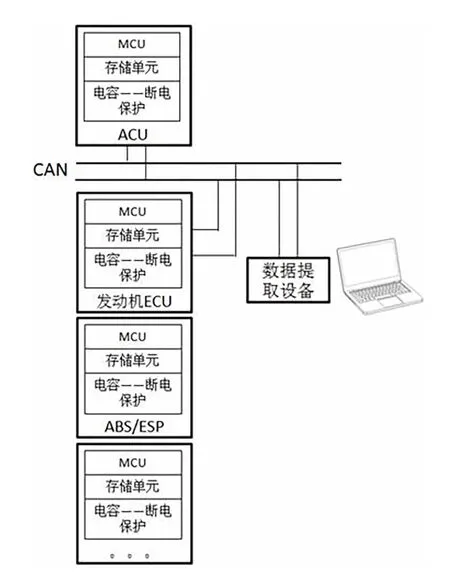
圖4 多個控制器共同開發EDR原理圖
3 總結
本文通過分析強制性國家標準《汽車事件數據記錄系統》的要求、EDR系統特性及數據來源,結合整車實際電子電氣架構的情況,對EDR系統的開發方案進行研究分析。本文提出了4種基于CAN總線的汽車事件數據記錄系統開發方案,適用于不同的電子電氣架構設計。EDR系統對交通事故現場重組提供詳實、客觀的數據依據,系統開發方案的探究具有重大現實意義。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
