UUV應(yīng)急處理策略構(gòu)建推理研究
2021-05-08 08:01:54張寶貴
數(shù)字海洋與水下攻防 2021年2期
張寶貴,周 俊
(中國船舶重工集團(tuán)有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
水下無人航行器(underwater unmanned vehicle,UUV)由于其隱蔽性、智能性和經(jīng)濟(jì)性等諸多優(yōu)點(diǎn),在科研試驗(yàn)、海底勘察和水下無人作戰(zhàn)等領(lǐng)域的應(yīng)用受到高度重視,推動(dòng)了UUV的快速發(fā)展[1]。UUV作為無人平臺(tái),考慮其任務(wù)執(zhí)行的安全性、延續(xù)性和時(shí)效性,系統(tǒng)應(yīng)急處理能力的優(yōu)略是衡量UUV的綜合性能關(guān)鍵要素[2-4]。目前,國內(nèi)對UUV的工程化研究比較深入的僅限少數(shù)幾家研制單位,大多數(shù)UUV的應(yīng)急處理策略比較簡單。本文將UUV應(yīng)急處理決策關(guān)聯(lián)UUV系統(tǒng)故障測試及診斷,利用故障模式分析,結(jié)合領(lǐng)域?qū)I(yè)推理和診斷是決定UUV應(yīng)急處理決策的有效方法,這種方法在航天領(lǐng)域有比較成熟的應(yīng)用[5-6]。
1 UUV應(yīng)急處理策略概述
UUV應(yīng)急處理策略與 UUV用途和任務(wù)緊密關(guān)聯(lián),UUV執(zhí)行不同任務(wù)時(shí)響應(yīng)不同的應(yīng)急策略。UUV應(yīng)急處理策略構(gòu)建一般包含應(yīng)急情況確定、應(yīng)急等級劃分、應(yīng)急情況判斷及應(yīng)急處理響應(yīng)等內(nèi)容。
1.1 應(yīng)急情況確定
UUV的任務(wù)流程主要包括布放,自主航行,執(zhí)行任務(wù),回收等主要環(huán)節(jié)。在整個(gè)任務(wù)流程中,各環(huán)節(jié)均可能出現(xiàn)各種類型的應(yīng)急情況。因此,UUV應(yīng)急處理策略的構(gòu)建基礎(chǔ)是系統(tǒng)應(yīng)急情況確定,系統(tǒng)應(yīng)急情況一般結(jié)合UUV任務(wù)流程和UUV故障模式綜合分析來確定。
1.2 應(yīng)急情況等級劃分
不同的UUV應(yīng)急情況對UUV任務(wù)最終完成有不同程度影響。在應(yīng)急處理策略構(gòu)建時(shí),需要梳理UUV任務(wù)流程確定UUV應(yīng)急等級。UUV應(yīng)急等級劃分基本原則是按影響UUV最終任務(wù)完成情況的嚴(yán)重程度,由高到低確定,其中1級最高,1級應(yīng)急情況將導(dǎo)致任務(wù)終止。其他應(yīng)急情況可根據(jù)影響任務(wù)完成情況后果程度酌情確認(rèn)。
1.3 應(yīng)急情況判斷
UUV應(yīng)急處理策略中比較關(guān)鍵的內(nèi)容是應(yīng)急情況判斷,一套比較完善的UUV應(yīng)急情況判斷體系需結(jié)合UUV系統(tǒng)狀態(tài)測試以及UUV故障診斷。UUV系統(tǒng)狀態(tài)測試除了對 UUV系統(tǒng)自身功能部件的功能性能測試外,還應(yīng)包含UUV對外部關(guān)鍵因素的測試,如深度、高度等測試信息。UUV故障診斷主要是結(jié)合故障模式、系統(tǒng)狀態(tài)測試和故障影響建立故障診斷方案。
1.4 應(yīng)急處理響應(yīng)
目前,大多數(shù)UUV的應(yīng)急處理響應(yīng)主要集中在安全應(yīng)急措施上,對于應(yīng)急情況處理邏輯框架的研究相對較弱。UUV應(yīng)急處理邏輯框架需綜合應(yīng)急響應(yīng)部件的功能特性、故障診斷和應(yīng)急情況等級等方面的信息后系統(tǒng)搭建。其中,當(dāng)UUV同時(shí)檢測到多個(gè)應(yīng)急情況且有沖突時(shí),按優(yōu)先級別高的應(yīng)急情況對應(yīng)的措施進(jìn)行處理。
2 分布式UUV應(yīng)急處理策略系統(tǒng)構(gòu)架
UUV應(yīng)急處理策略推理技術(shù)是綜合 UUV系統(tǒng)狀態(tài)測試、故障測試診斷以及應(yīng)急處理響應(yīng)等多方面的系統(tǒng)工程。UUV作為無人系統(tǒng),海量測試信息是實(shí)現(xiàn)推理診斷精確性和應(yīng)急處理有效性的前提條件,但海量測試信息的處理分析和診斷會(huì)影響故障診斷實(shí)時(shí)性,因此,構(gòu)建合理的推理診斷系統(tǒng)構(gòu)架,分層分級處理測試任務(wù)和測試信息[8],才能實(shí)現(xiàn)推理診斷的精確性和應(yīng)急處理的實(shí)時(shí)性。
UUV系統(tǒng)集成度高,功能部件間的關(guān)聯(lián)較多,故障模式復(fù)雜,測試信息豐富,這對提高推理的精度有較大的幫助,但大量的數(shù)據(jù)解析和邏輯推理運(yùn)算降低了系統(tǒng)的時(shí)效性。若采用集中式診斷系統(tǒng),很難實(shí)時(shí)有效地處理海量測試信息,而分布式診斷系統(tǒng)構(gòu)架可實(shí)現(xiàn)測試信息的分級處理,從組件到子系統(tǒng)進(jìn)而到系統(tǒng),由下至上逐級診斷處理,既保證了測試信息的精確處理,又確保了診斷決策和處理的快速性和實(shí)時(shí)性。
圖1為通用UUV診斷系統(tǒng)構(gòu)架,各功能組件為底層測試點(diǎn),部分組件具備一定的BIT功能,所有測試點(diǎn)的測試信息通過總線傳輸至各分系統(tǒng)故障診斷模塊,分系統(tǒng)故障診斷模塊根據(jù)任務(wù)和功能要求對測試信息進(jìn)行篩選和處理,并將結(jié)果傳輸至故障診斷決策系統(tǒng),故障診斷決策系統(tǒng)負(fù)責(zé)子系統(tǒng)故障診斷協(xié)同、分配和信息融合,提供決策信息,進(jìn)而采取相應(yīng)的應(yīng)急處理措施。
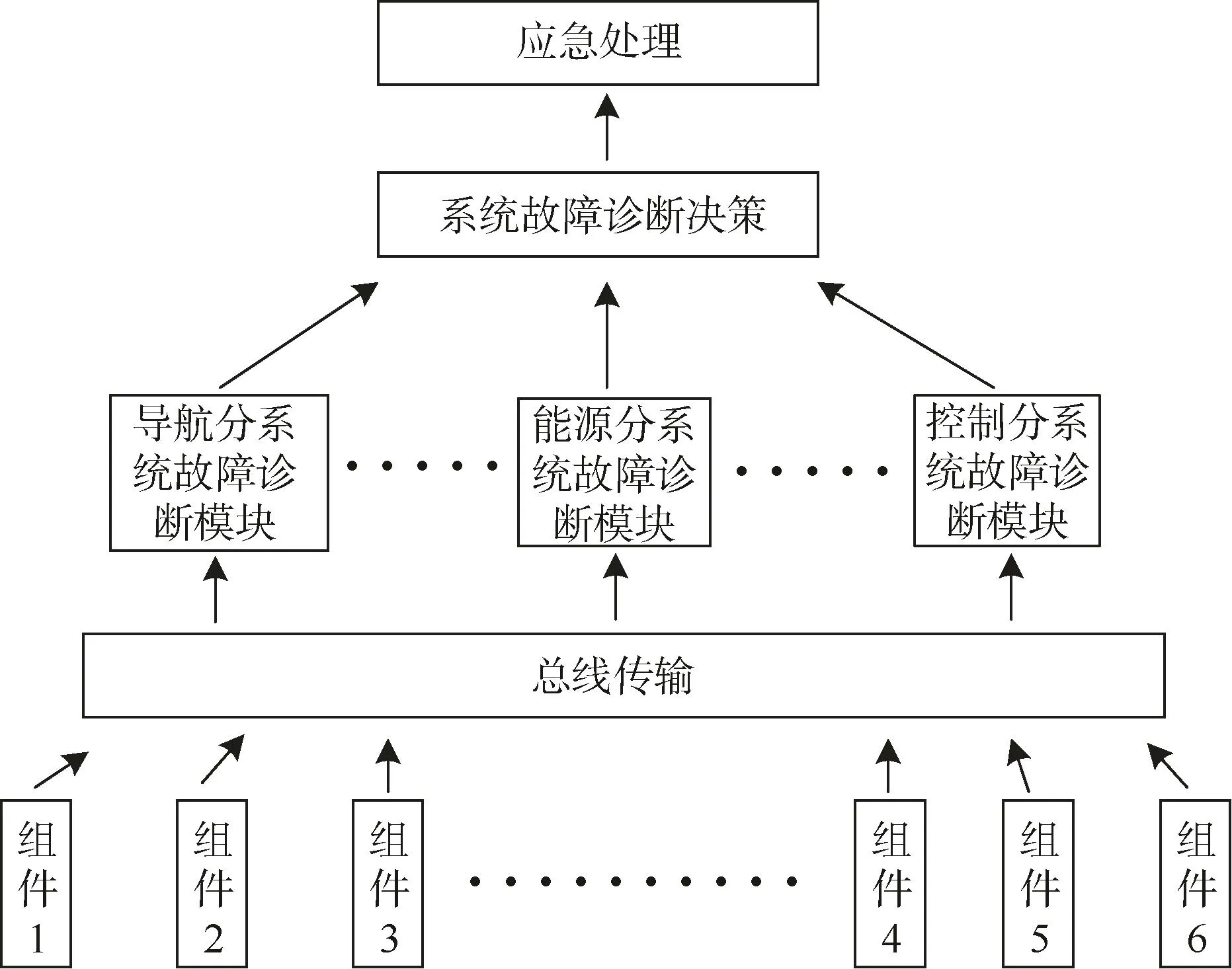
圖1 UUV診斷系統(tǒng)構(gòu)架圖Fig.1 Architecture of UUV diagnostic system
分布式UUV診斷系統(tǒng)將故障測試診斷分級分配,避免故障診斷決策系統(tǒng)因復(fù)雜故障信息處理過量造成決策滯后,應(yīng)急處理不及時(shí)引起嚴(yán)重后果,又確保了應(yīng)對復(fù)雜故障時(shí)測試信息的完整性,提高了UUV系統(tǒng)故障診斷及應(yīng)急處理能力。
3 UUV分級應(yīng)急處理推理策略
UUV應(yīng)急處理程序一般根據(jù) UUV的使命任務(wù)和功能來劃分,與UUV的故障模式息息相關(guān),故障的嚴(yán)重程度直接決定UUV任務(wù)的完成情況。根據(jù) UUV使命任務(wù),將 UUV的故障模式分為 2類:一是嚴(yán)重故障,該類故障的發(fā)生可直接導(dǎo)致UUV任務(wù)終止;二是其他故障,該類故障發(fā)生時(shí),會(huì)導(dǎo)致相關(guān)功能件功能異常,但不影響UUV最終任務(wù)的完成。結(jié)合UUV故障模式,同時(shí)避免集中式處理帶來的資源利用率分布不均造成的時(shí)效性問題,將UUV應(yīng)急處理策略劃分為3個(gè)等級,由高到低分別為核心功能故障導(dǎo)致無法完成基本任務(wù)、由于外界原因?qū)е聼o法完成基本任務(wù)和可完成基本任務(wù)但失去部分功能3個(gè)等級。
1)第 I級:核心功能故障導(dǎo)致無法完成基本任務(wù)。
當(dāng)UUV核心部件出現(xiàn)功能性故障無法自恢復(fù)時(shí),將會(huì)導(dǎo)致UUV無法繼續(xù)執(zhí)行后續(xù)任務(wù),這類故障歸為I級應(yīng)急響應(yīng)故障現(xiàn)象,UUV優(yōu)先響應(yīng)I級應(yīng)急處理程序。
2)第II級:由于外界測試問題導(dǎo)致無法完成基本任務(wù)。
UUV自身無故障出現(xiàn),到其測試點(diǎn)測試的外界因素異常導(dǎo)致 UUV無法繼續(xù)有效執(zhí)行后續(xù)任務(wù),這類異常歸為II級響應(yīng)異常現(xiàn)象,UUV響應(yīng)完I級應(yīng)急處理程序,處理II級應(yīng)急響應(yīng)程序或者無I級應(yīng)急處理程序需響應(yīng)時(shí)優(yōu)先處理II應(yīng)急處理程序。
3)第III級:可完成基本任務(wù)但失去部分功能。
UUV出現(xiàn)故障,但不影響 UUV基本任務(wù)執(zhí)行。針對這類故障,UUV對應(yīng)故障測試點(diǎn)和響應(yīng)的功能進(jìn)行相應(yīng)處理,前提是保證基本任務(wù)的執(zhí)行。III級響應(yīng)故障的響應(yīng)等級最低。
根據(jù)UUV應(yīng)急響應(yīng)等級,由高到低進(jìn)行深度推理,I級應(yīng)急響應(yīng)對應(yīng)故障單元規(guī)模小,推理效率高,可快速準(zhǔn)確定位,相對而言III級應(yīng)急響應(yīng)對應(yīng)故障單元規(guī)模大,推理時(shí)間長,同時(shí)會(huì)出現(xiàn)一定的不確定性。
4 應(yīng)急處理推理策略
針對各級應(yīng)急處理策略,采取面向應(yīng)急處理策略對應(yīng)故障的深度推理,基于UUV故障模式分析,建立UUV故障與應(yīng)急處理策略相對應(yīng)的應(yīng)急處理數(shù)據(jù)庫,結(jié)合推理方式[7]和UUV應(yīng)急處理特點(diǎn)進(jìn)行由高到低的反向推理策略,對同級別應(yīng)急處理策略進(jìn)行遍歷符合性推理,推理示意圖如圖2。
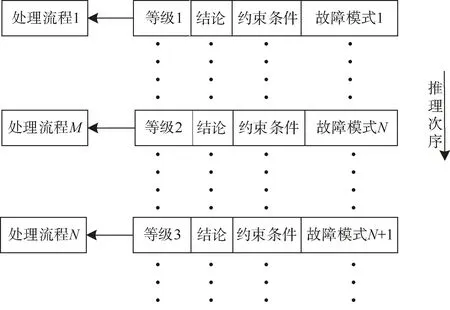
圖2 應(yīng)急處理推理策略示意圖Fig.2 Schematic diagram of emergency treatment reasoning strategy
當(dāng)出現(xiàn)單一故障時(shí),分系統(tǒng)分級進(jìn)行預(yù)先處理,系統(tǒng)級故障決斷按照遍歷推理,可保證推理診斷過程的精確性。當(dāng)某一故障模式的結(jié)論作為其他故障模式的約束條件時(shí),存在遍歷推理無法匹配的可能性。針對這一問題,需要進(jìn)一步進(jìn)行深度推理,推理原則如下:
1)建立故障庫,遍歷所有故障模式,當(dāng)該故障模式不以其他故障模式結(jié)論為約束條件或該條件已獲得,則匹配該故障模式,匹配成功,響應(yīng)對應(yīng)處理流程,若不成功,匹配下一個(gè)故障模式。
2)當(dāng)該故障模式以其他故障模式結(jié)論為約束條件,且該條件未獲得,則該故障模式應(yīng)納入下一次遍歷的故障庫中,然后退出并匹配下一個(gè)故障模式。
通過針對單一故障和復(fù)合故障的反向推理和深度推理相結(jié)合,建立包含故障與應(yīng)急處理策略相對應(yīng)的應(yīng)急處理數(shù)據(jù)庫,可滿足推理的遍歷性要求,同時(shí)也保證推理過程精確性和嚴(yán)密性。
以某通用型UUV開展的應(yīng)急處理系統(tǒng)測試為例,21個(gè)組件,建立68個(gè)故障模式,160個(gè)應(yīng)急處理流程,采用半實(shí)物仿真結(jié)合實(shí)航的方式進(jìn)行測試,部分測試結(jié)果如表1。
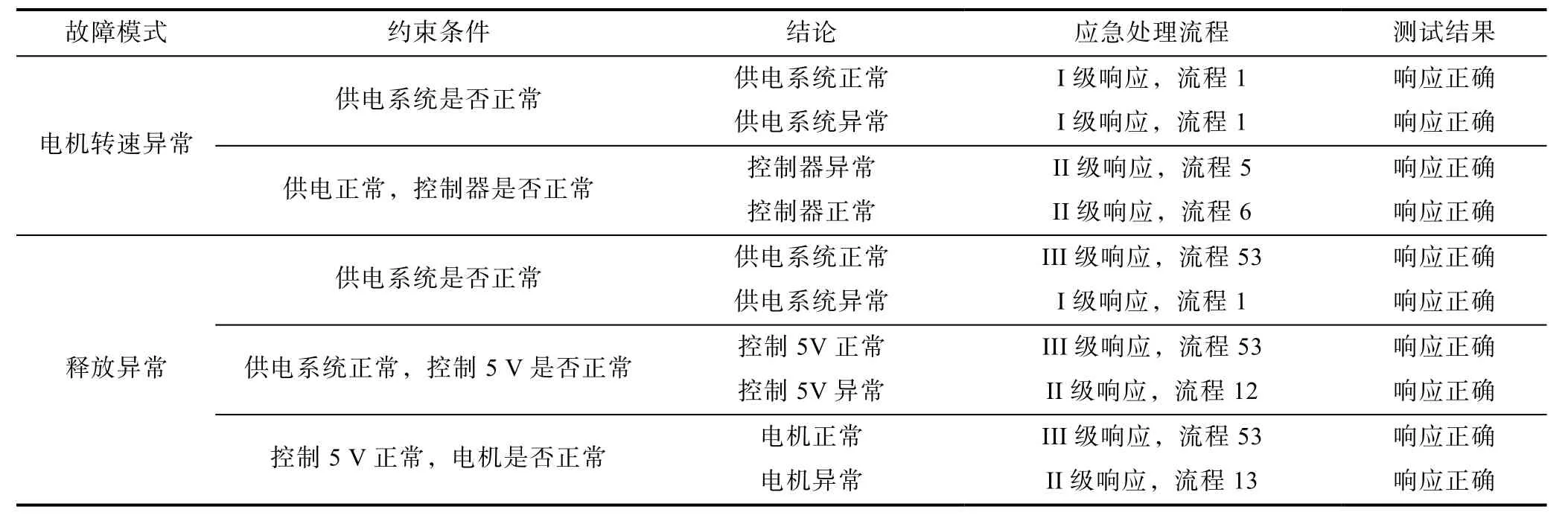
表1 UUV應(yīng)急處理策略測試情況表Table 1 Test table of UUV emergency treatment strategy
從測試結(jié)果來看,應(yīng)急處理策略推理正常,結(jié)論正確。
5 結(jié)束語
本文通過對 UUV應(yīng)急處理策略推理技術(shù)的研究,建立了分布式應(yīng)急處理策略構(gòu)建,實(shí)現(xiàn)快速故障診斷和應(yīng)急響應(yīng)。通過基于故障模式的反向推理和深度推理,利用故障分級診斷的推理策略,實(shí)現(xiàn)針對不同故障采取響應(yīng)應(yīng)急流程,并通過半實(shí)物仿真和實(shí)航測試,驗(yàn)證了UUV應(yīng)急策略的正確性,提高了水下無人航行器任務(wù)執(zhí)行的安全性和時(shí)效性。
猜你喜歡
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
時(shí)代英語·高三(2014年5期)2014-08-26 02:49:51
振動(dòng)、測試與診斷(2014年5期)2014-03-01 01:14:21
