基于有限元仿真的格構鋼支柱振動狀態分析
2021-05-10 07:41:52馬啟明劉繼冬吳積欽
電氣化鐵道 2021年2期
周 吉,馬啟明,劉繼冬,吳積欽
0 引言
接觸網是經由集電器向電力牽引單元提供電能的導體系統[1],接觸網支柱是接觸懸掛的承載體,作為鐵路供電系統最主要的豎向承力構件,其安全問題非常重要[2]。當外部因素造成接觸網支柱發生振動時,其所承載的接觸懸掛也會隨之振動,受電弓經過時會對弓網運行狀態造成一定影響,因此有必要對接觸網支柱振動情況進行分析。
文獻[2]對橋梁格構鋼支柱進行了靜力學分析、動力學分析,并引入到地震激勵中獲取其振動狀態,研究了接觸網支柱在地震作用下的性能狀態,但具有一定特殊性且支柱系統性研究不完善。文獻[3]中提到長臺關大橋上接觸網支柱與橋墩連為一體,橋梁振動引起接觸網共振,支柱跟隨橋體擺動,支柱振動波形傳導到線索的振動幅度較大,最大時接觸線跨中振幅可達200 mm,正饋線跨中振幅可達300 mm,造成線索磨損加劇,在承力索和正饋線鉤頭鞍子里發現大量斷股現象,不利于弓網相互作用的穩定性。文獻[4]對支柱及其撓度組成及影響進行定量分析,提出了支柱撓度設計標準建議,計算了風載荷下引起接觸線高度的位置變化,但未考慮支柱振動對定位點處接觸線高度的進一步影響。文獻[5]對H型鋼支柱提出了考慮土壤結構相互作用的三維結構的基本模態形狀、固有頻率及交叉現象。文獻[6]介紹了不同車速下高速列車對H型鋼支柱及接觸線產生的地面傳播振動的影響,但未對H型鋼支柱振動進行詳細闡述。基于上述情況,本文以電氣化鐵路橋梁區段中常見的13 m格構鋼支柱為例,采用ANSYS有限元仿真軟件對其振動狀態進行詳細分析,以探究支柱振動對接觸網振動的影響。
1 格構鋼支柱模型的建立
某既有線路橋梁區段采用全補償簡單鏈形懸掛,線索組合方式為THJ150+CTAH150,其中13 m格構鋼支柱容量為G250/13,位于橋梁區段,采用正定位方式,定位點處水平分力為356.34 N,承力索定位點處水平分力為404.82 N,定位點處豎直載荷為81.438 N。考慮到實際運行過程中格構鋼支柱通過搭載腕臂系統達到承載接觸懸掛的目的,故將鋼柱模型與腕臂系統看作一個整體進行分析。13 m格構鋼支柱及腕臂系統材料屬性如表1所示。

表1 格構鋼支柱及腕臂系統材料屬性
格構鋼支柱實體模型及在ANSYS中建立的仿真模型如圖1所示。
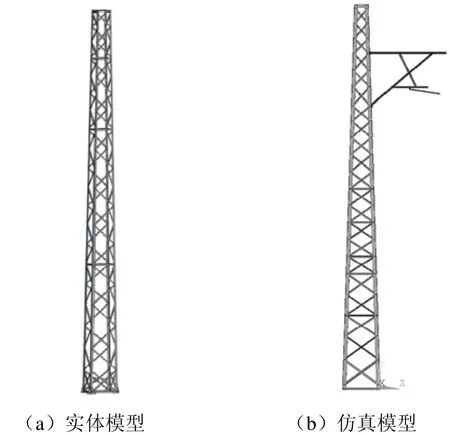
圖1 格構鋼支柱模型
在模型建立過程中,選取ANSYS全局坐標中的X方向為順線路方向,選取全局坐標中的Y方向為格構鋼支柱由低到高的方向即豎直方向,選取全局坐標中的Z方向為正定位拉出值所在方向。
2 格構鋼支柱模型的驗證
由GB/T 25020.1-2010《電氣化鐵路接觸網鋼支柱 第1部分:格構式支柱》可知,格構式鋼支柱結構性能需滿足標準檢驗彎矩下柱頂撓度不大于0.015倍的支柱高度要求;在承載力檢驗彎矩(標準檢驗彎矩的150%)下各部件不產生明顯屈服[7]。本文中格構鋼支柱的標準檢驗彎矩為250 kN·m,承載力檢驗彎矩為375 kN·m,柱高13 m。在校驗標準檢驗彎矩時需在柱高12.9 m的位置沿著Z正方向施加19.38 kN的作用力;經仿真計算可知,在標準檢驗彎矩下柱頂撓度為35.971 mm,承載力檢驗彎矩下柱頂撓度為53.955 mm,二者均小于柱頂撓度極限值195 mm。由此可驗證格構鋼支柱模型的正確性。柱頂撓度如圖2所示。
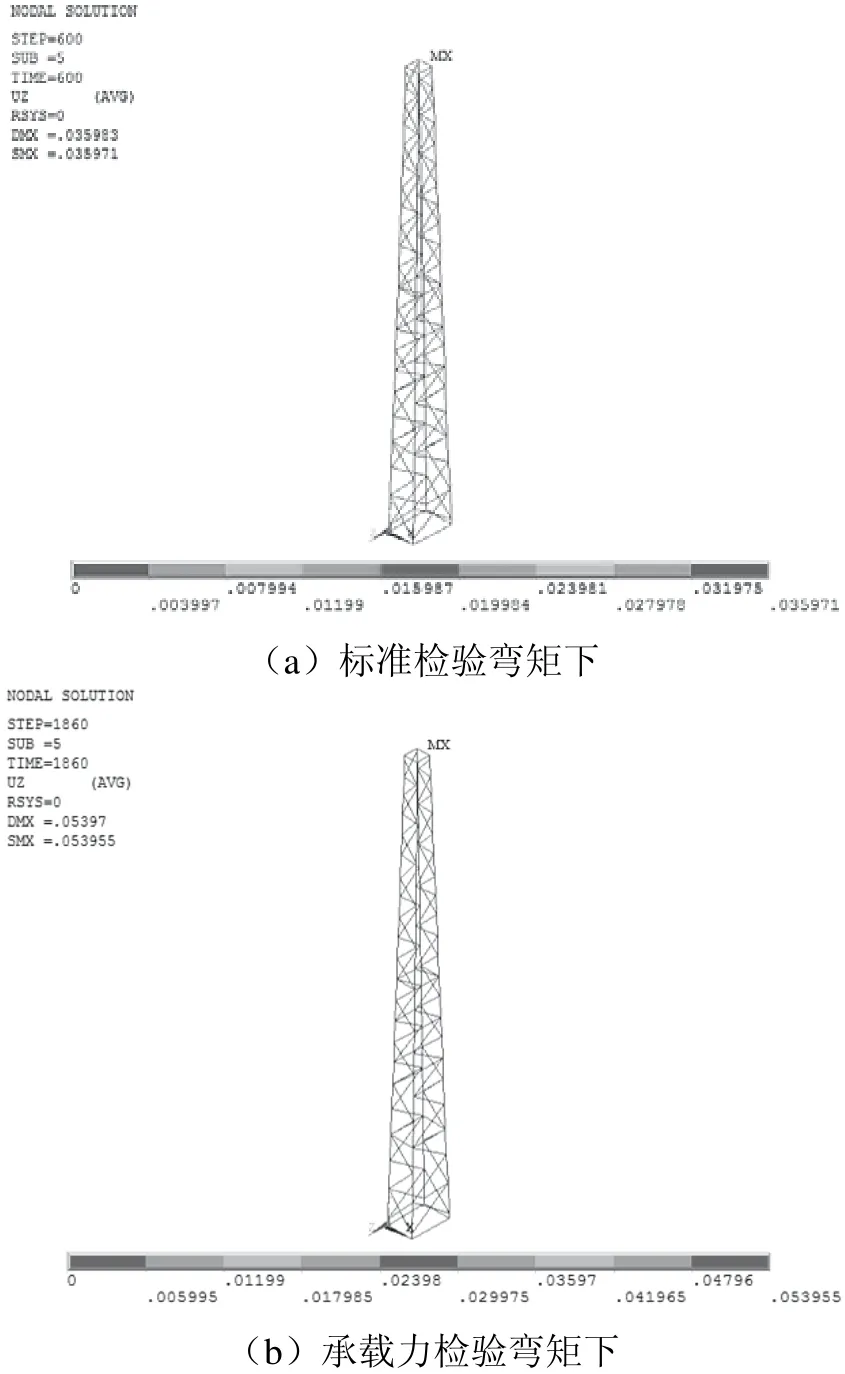
圖2 格構鋼支柱柱頂撓度
3 格構鋼支柱靜力學分析與模態分析
3.1 格構鋼支柱靜力學分析
選取的格構鋼支柱質量為1 351.18 kg,在實際工況中,模型整體受到重力作用且定位點處、承力索定位點處受線索張力的水平分力作用,存在由定位線夾、部分接觸線自重造成的豎直載荷。故在定位點處施加沿Z方向的水平分力356.34 N與沿Y負方向的豎直載荷81.438 N,在承力索定位點處施加沿Z方向的水平分力為404.82 N,對格構鋼支柱進行靜力學仿真,提取格構鋼支柱整體的Y方向位移變化及應力分布,如圖3、圖4所示。
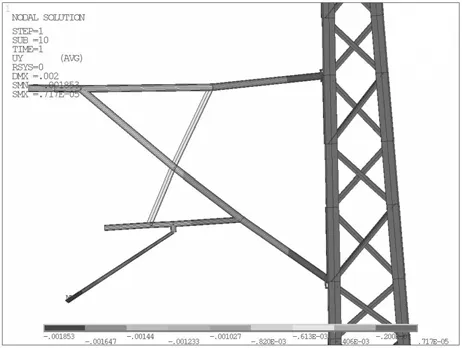
圖3 格構鋼支柱Y方向位移變化

圖4 格構鋼支柱應力分布
由靜力學仿真結果可知:Y方向最大位移出現在格構鋼支柱的中部位置,其大小為0.003 91 mm;Y負方向最大位移出現在定位點處,其大小為1.848 mm。提取底部4個角肢柱的支反力及彎矩如表2所示。

表2 格構鋼角肢柱支反力及彎矩
由表2可知:格構鋼支柱前側2個角肢柱受壓力作用,左前角肢柱所受壓力為7 226.82 N,右前角肢柱所受壓力為7 221.10 N;后側2個角肢柱受拉力作用,左后角肢柱所受拉力為573.10 N,右后角肢柱所受拉力為573.24 N;角肢柱的最大彎矩為28.22 N·m;應力最大位置出現在定位器連接的定位點處,應力為7.68 MPa;平腕臂所受最大水平拉力為814.178 N,最大應力為1.38 MPa。由靜力學仿真可知,格構鋼支柱模型整體處于低應力彈性狀態。
3.2 格構鋼支柱模態分析
格構鋼支柱系統的固有頻率取決于結構的剛度以及質量。模態分析可以預估結構在某頻段內由外部或內部各種振源作用產生的實際振動響應,是諧波響應分析的基礎。在靜力學分析的基礎上,為了解格構鋼支柱的自振頻率及振型,需要對其進行數值模態分析[8]。本文采用Block Lanczos法對格構鋼支柱進行八階模態分析并提取對應的頻率(表3)及振型(圖5)。
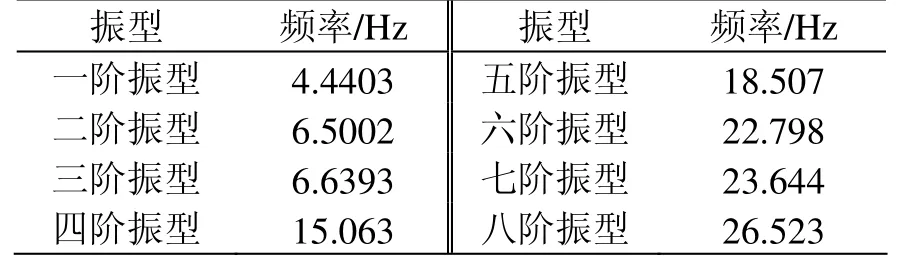
表3 格構鋼支柱八階模態振型頻率

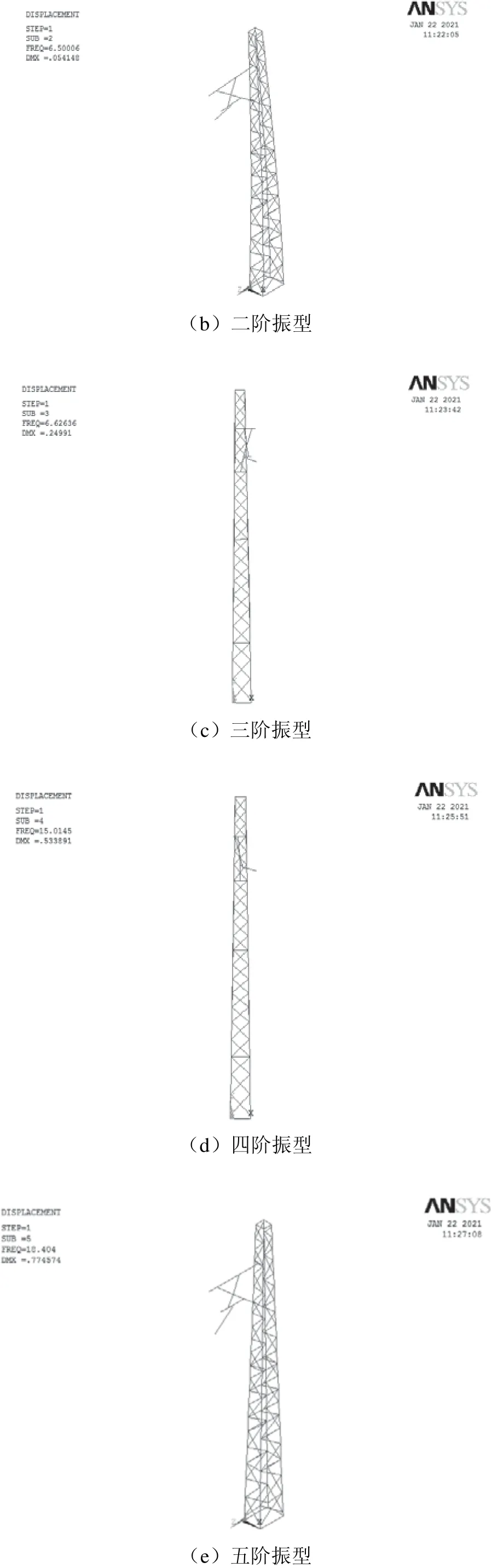
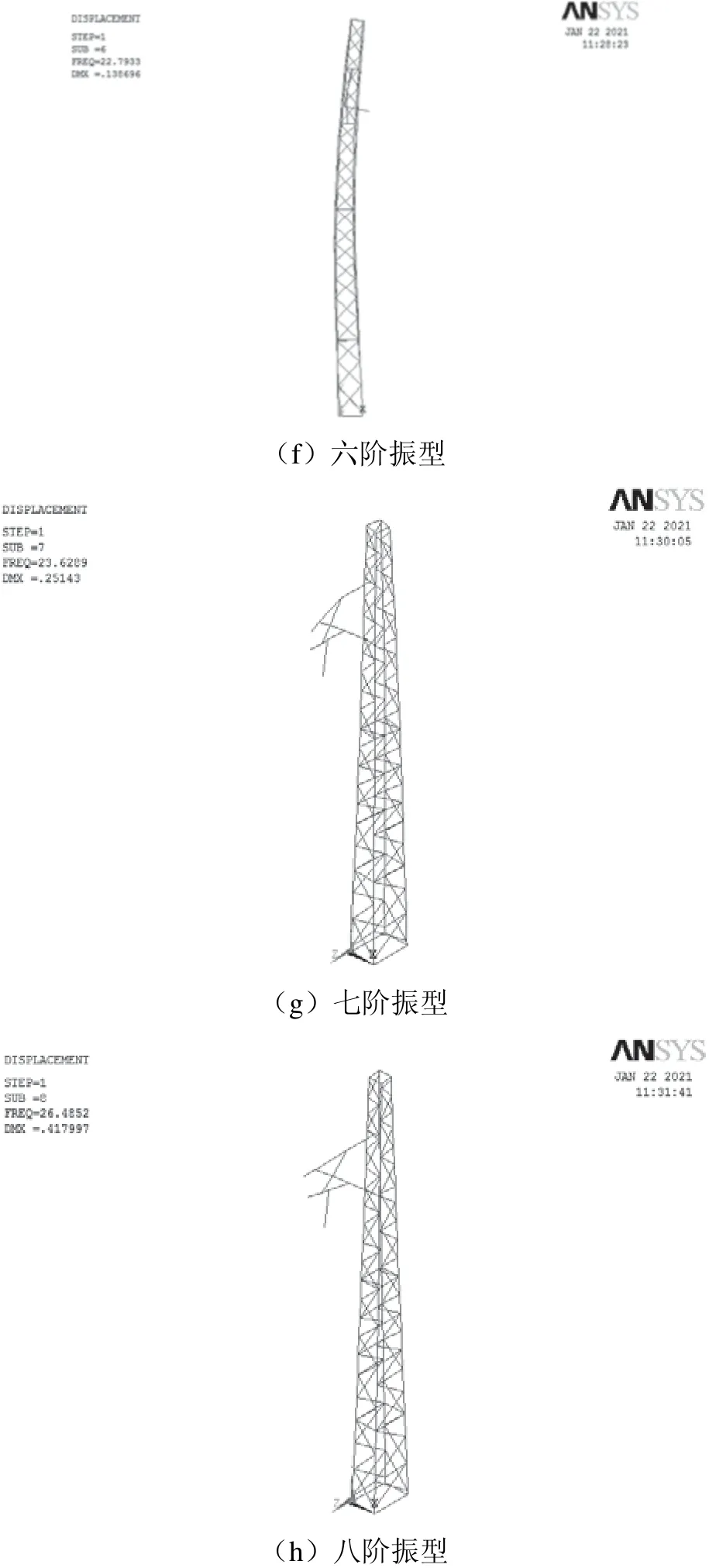
圖5 格構鋼支柱振型
第一階振型時格構鋼支柱上半部與腕臂系統在XY平面內順線路方向擺動,對應頻率為4.439 06 Hz;第二階振型時格構鋼支柱整體(包括腕臂系統)會在YZ平面內沿拉出值方向發生彎曲變形,對應頻率為6.500 06 Hz;第三階振型時格構鋼支柱會在XY平面內逆線路方向擺動且腕臂系統會順線路方向擺動,對應頻率為6.626 36 Hz;第四階振型時平腕臂會在XY平面內逆線路方向擺動而定位器順線路方向擺動,對應頻率為15.014 5Hz;第五階振型時腕臂系統局部振動明顯,定位器會在YZ平面內沿豎直方向擺動,對應頻率為18.404 Hz;第六階振型時格構鋼支柱會在XY平面內順線路方向彎曲變形且定位管逆線路方向擺動,定位器順線路方向擺動,對應頻率為22.793 3 Hz;第七階振型時格構鋼支柱會繞Y軸順時針發生扭曲變形且平腕臂與定位器在XY平面內順線路方向擺動,定位管、斜撐、斜腕臂逆線路方向擺動,對應頻率為23.628 9 Hz;第八階振型時格構鋼支柱會繞Y軸逆時針發生扭曲變形且平腕臂與定位器在XY平面內順線路方向擺動,定位管、斜撐、斜腕臂逆線路方向擺動,對應頻率為26.485 2 Hz。為進一步探究格構鋼支柱在外界作用力頻率為4.439 06~26.485 2 Hz時對應的振動情況,需要對格構鋼支柱進行諧波響應分析。
4 格構鋼支柱諧波響應分析
由格構鋼支柱基底微動造成的格構鋼支柱振動,可看作格構鋼支柱產生加速度時具有的慣性力。慣性力會使物體有保持原有運動狀態的傾向,而此時若以該物體為參考系,并在該參考系上建立坐標系,此時就仿佛有一股方向相反的力作用在該物體上,使該物體在坐標系內發生位移[9]。本文以外加作用力模擬格構鋼支柱基底微動產生的慣性力,采用完全法求解諧波響應,分析結構響應與載荷之間的傳遞特性,獲取格構鋼支柱在幾種頻率下的響應,并得到響應隨頻率變化的曲線,以預測格構鋼支柱的持續動力特性。
4.1 理論分析
頻域下線性系統動力學方程[10,11]為

式中:M、C、K分別為格構鋼支柱系統的質量矩陣、阻尼矩陣、剛度矩陣;分別為系統的絕對加速度響應、絕對速度響應和絕對位移響應;F(ω)為系統的外部作用載荷。
由于格構鋼支柱系統中既存在約束節點又存在非約束節點,因此,可按照約束節點與非約束節點分塊[12,13],可將式(1)寫為
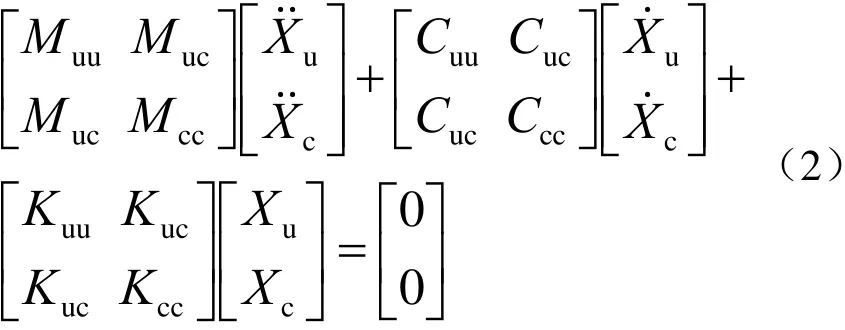
式中:用角標“u”表示非約束節點集合,用角標“c”表示約束節點集合;分別表示非約束節點集合的絕對加速度響應、絕對速度響應和絕對位移響應;分別表示約束節點集合的絕對加速度響應、絕對速度響應和絕對位移響應;Muc、Cuc、Kuc分別為單元耦合質量、耦合阻尼和耦合剛度。
從而可知非約束節點集合的動力學方程為

使用完全法即可按照式(3)對格構鋼支柱的頂點、平腕臂安裝點以及定位點的位移進行求解。
4.2 實例計算
為模擬格構鋼支柱基底微動造成的格構鋼支柱產生加速度時所具有的慣性力,在格構鋼支柱基底角肢柱位置施加沿Z正方向的作用力,頻率為2~30 Hz,大小分別為500 N(平均每個角肢柱施加125 N),1 000 N(平均每個角肢柱施加250 N)與1 500 N(平均每個角肢柱施加375 N),計算步數為50步,即步長頻率為0.56 Hz,阻尼比為0.02。繼而獲取格構鋼支柱頂點、平腕臂安裝點在X、Y、Z3個方向的位移變化,如圖6、圖7所示。
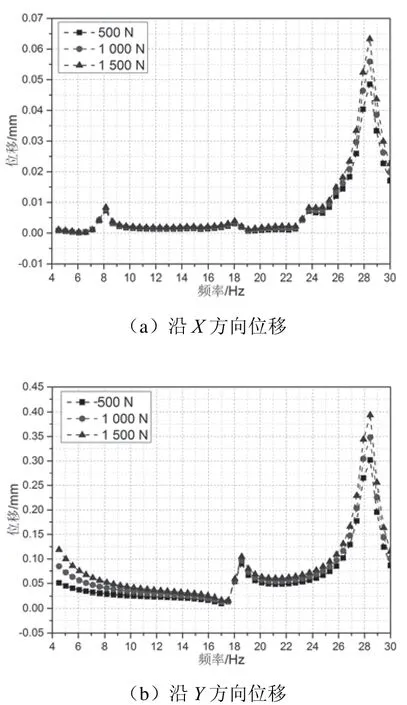

圖6 支柱頂點位移變化
從格構鋼支柱頂點位置來看,該位置隨作用力的增加并不會產生較大的位移變化,在基底部位施加1 500 N作用力下該位置沿X方向的最大位移僅為0.063 mm,沿Y方向的最大位移僅為0.4 mm,沿Z方向的最大位移為7 mm,作用力的頻率均為28.44 Hz,對應為格構鋼支柱的第八階固有頻率。可知在基底部位施加28.44 Hz頻率的作用力時,格構鋼支柱頂點位置在X、Y、Z3個方向的位移最大,并且位移隨著作用力大小的增加而逐漸增加,但由于格構鋼支柱整體以焊接為主,整體剛度較大,且處于低應力彈性狀態,故支柱頂點在X、Y方向位移基本可以忽略。雖然作用力沿Z正方向,支柱頂點在Z方向的最大位移為7 mm,遠小于柱頂撓度極限值195 mm。
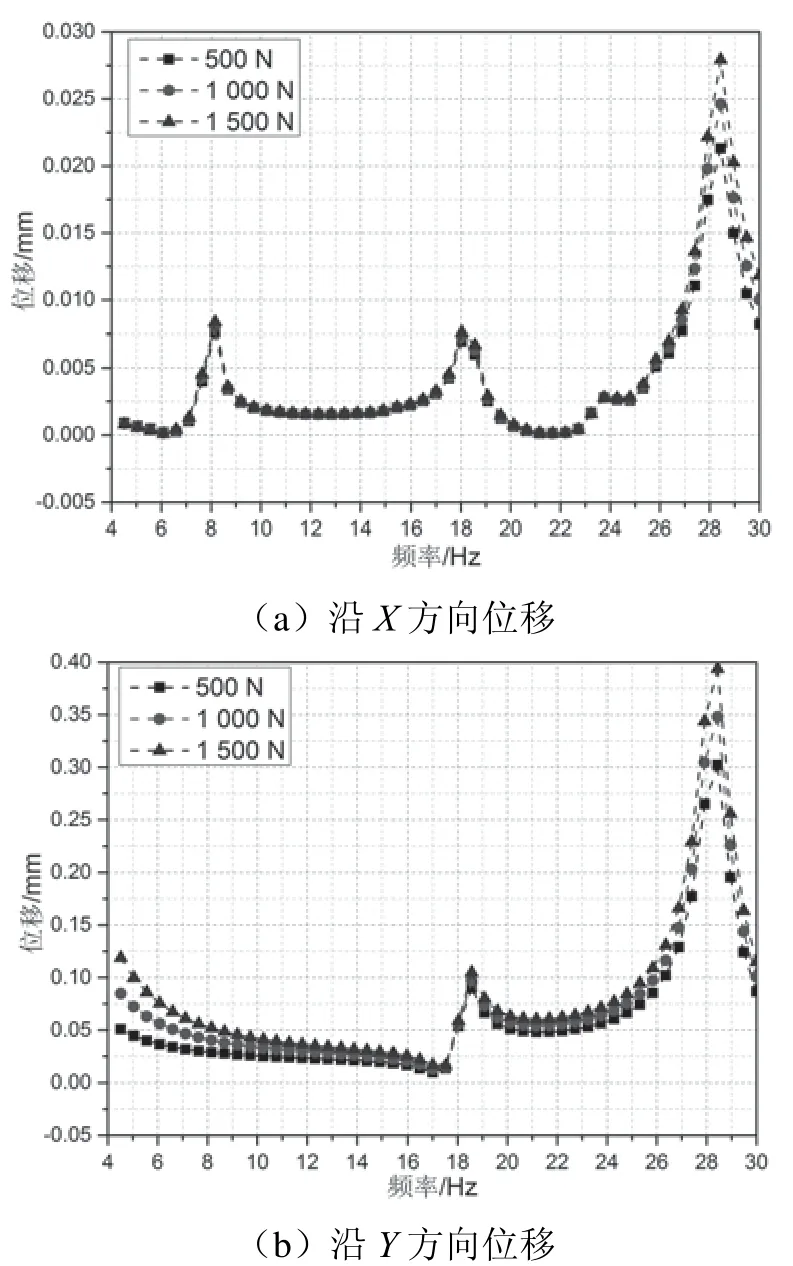
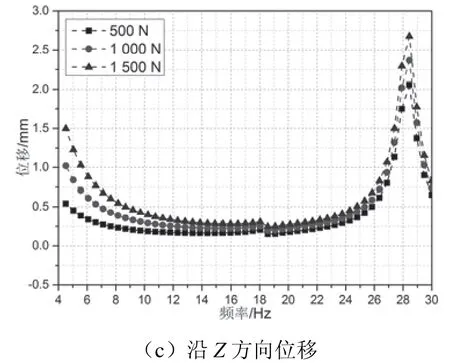
圖7 平腕臂安裝點位移變化
從平腕臂安裝點位置來看,該位置隨作用力的增加同樣不會產生較大的位移變化,在基底部位施加1 500 N作用力下該位置沿X方向的最大位移僅為0.026 7 mm,沿Y方向的最大位移僅為0.393 7 mm,沿Z方向的最大位移為2.68 mm,作用力的頻率均為28.44 Hz,對應為格構鋼支柱的第八階固有頻率。但由于格構鋼支柱整體剛度較大,處于低應力彈性狀態,平腕臂安裝點高度小于支柱頂點高度,斜腕臂以及斜撐會對平腕臂起到支撐的作用,緩解平腕臂安裝點受到的由平腕臂自重引起的彎矩影響。正因如此,雖然作用力沿Z正方向,平腕臂安裝點在Z方向的最大位移(2.68 mm)要小于支柱頂點在Z方向的最大位移(7 mm)。
格構鋼支柱頂點以及平腕臂安裝點在X、Y、Z3個方向的位移均在基底作用力頻率為28.44 Hz時最大,但是位移量均較小,格構鋼支柱較為穩定。進一步觀察支柱振動對定位點處的影響,繪制定位點處在X、Y、Z3個方向的位移變化如圖8所示。

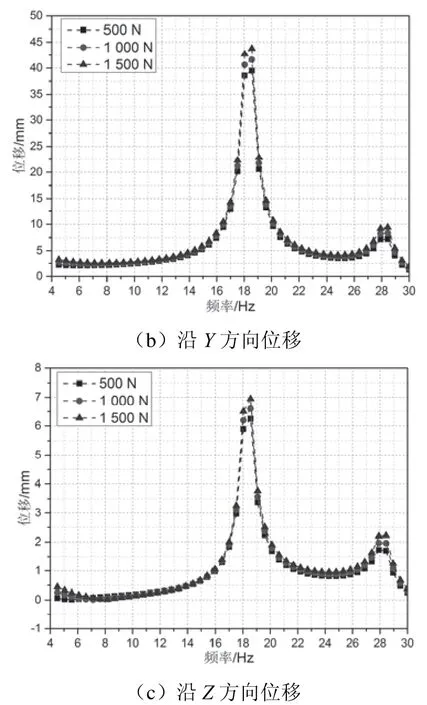
圖8 定位點處位移變化
定位點處X方向位移基本不會隨支柱基底Z正方向作用力的增大而增大,但是會隨著作用力的頻率達到系統整體四階固有頻率、五階固有頻率、七階固有頻率、八階固有頻率而形成多個峰值,但最大位移僅為0.255 mm,即定位點處沿X方向位移基本可以忽略;定位點處Y方向位移會隨基底作用力的增大而增大,當作用力為1 500 N且頻率為18.56 Hz時,對應第五階固有頻率,定位點的振動位移達到43.77 mm,振動較為顯著,易造成弓網離線,對弓網相互作用穩定性造成影響;定位點處Z方向位移雖然會隨作用力的增大而增大,但增量不明顯,在基底Z正方向1 500 N作用力下最大位移為6.94 mm,小于拉出值誤差上限30 mm[14],不會對定位點處的拉出值造成太大影響。
進一步繪制定位點處應力與應變如圖9所示。由圖9可知:隨作用力頻率的增大,定位點處應力會在第五階和第八階固有頻率附近出現峰值,并且隨著作用力的增大,峰值逐漸增加;當作用力為1 500 N,頻率為18.56 Hz時,定位點處最大應力為134.9 MPa,相比于靜力狀態下應力增大了127.22 MPa。由于鋼結構焊件、鑄鋼及有色金屬零件的安全系數不小于3.0[15],則材質編號為Q235A型的定位器在定位點連接處的許用應力為78.33 MPa,因此當基底作用力頻率為17~20 Hz時,定位點處的應力會超過其許用應力(但未超過屈服強度),產生應力集中,對其壽命造成影響。定位點處存在沿Z正方向的水平分力,會造成定位器末端產生軸向應變,當基底作用力為1 500 N、頻率為27.6 Hz時,產生最大軸向應變響應為3.14×10-6mm/mm。定位器所連接的接觸線在自重的作用下會對定位器末端產生彎曲應變,該應變會隨著基底作用力頻率的變化在第四階、五階、七階、八階固有頻率處產生多個峰值,最大彎曲應變為10.1×10-6mm/mm。
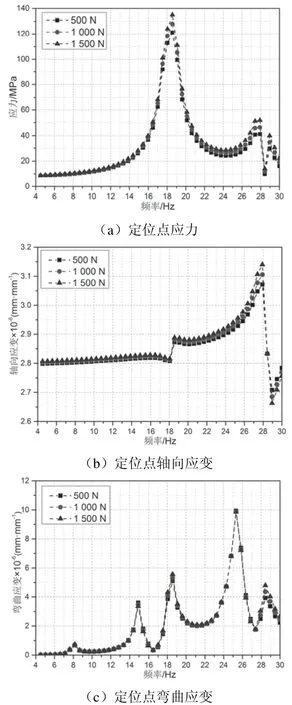
圖9 定位點處應力與應變
5 結論
本文對接觸網設施中常見的13 m格構鋼支柱進行建模分析,得到以下結論:
(1)通過靜力學分析可知,13 m格構鋼支柱-腕臂系統最大Y方向位移出現在格構鋼支柱的中部位置,為0.003 91 mm,應力最大位置為定位器連接的定位點處,支柱基本無變形,處于低應力彈性狀態。
(2)對格構鋼支柱-腕臂系統進行數值模態分析可知,其一階固有頻率為4.4403 Hz,二階固有頻率為6.500 2 Hz,三階固有頻率為6.639 3 Hz,四階固有頻率為15.063 Hz,五階固有頻率為18.507 Hz,六階固有頻率為22.798 Hz,七階固有頻率為23.644 Hz,八階固有頻率為26.523 Hz。
(3)在格構鋼支柱基底角肢柱位置施加沿Z正方向的作用力,頻率為2~30 Hz,大小分別為500 N(平均每個角肢柱施加125 N),1 000 N(平均每個角肢柱施加250 N)與1 500 N(平均每個角肢柱施加375 N)。經過諧波響應分析可知,由于格構鋼支柱整體以焊接為主,整體剛度較大,斜腕臂以及斜撐會對平腕臂起到支撐作用,即使基底受到頻率為28.44 Hz沿Z正方向1 500 N的作用力,支柱頂點與平腕臂安裝點在X、Y2個方向的位移基本可以忽略,沿Z方向位移也均未超過7 mm,格構鋼支柱整體較穩定。定位點處Y方向位移會隨基底作用力增大而增大,當作用力為1 500 N且頻率為18.56 Hz時,對應第五階固有頻率,定位點Y方向振動位移達43.77 mm,振動較為顯著,易造成弓網離線,證明支柱振動會加劇接觸網振動,不利于弓網作用穩定性。定位器末端應力為134.9 MPa,超過其許用應力(未超過屈服強度),對壽命造成一定影響。后續有必要對支柱振動狀態下弓網動態作用進行深入研究。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40