基于深度置信網(wǎng)絡(luò)甘蔗轉(zhuǎn)運車狀態(tài)識別
2021-05-11 06:45:28袁泓磊李尚平
甘蔗糖業(yè) 2021年2期
袁泓磊,李尚平
(廣西民族大學,廣西南寧530006)
0 引言
甘蔗是我國重要的經(jīng)濟作物,而廣西、云南的丘陵地區(qū)蔗地約占90%,廣西丘陵蔗地約占種植面積的 60%以上[1]。蔗地存在小而分散、地形復雜、機耕道路差等問題,影響了甘蔗全程機械化的推進,造成原料及砍運成本居高不下,嚴重制約了我國糖業(yè)的發(fā)展以及在國際市場上的競爭力。目前,我國丘陵地區(qū)的甘蔗轉(zhuǎn)運車多采用半掛側(cè)翻式結(jié)構(gòu)或廂式轉(zhuǎn)運結(jié)構(gòu),車型輪距大、提升重心高,甘蔗轉(zhuǎn)運一般依靠司機手動操作。在丘陵地區(qū)蔗地進行甘蔗轉(zhuǎn)運時,由于地形復雜或司機經(jīng)驗不足,難以準確判斷運車的運行狀態(tài),容易發(fā)生過載和車身傾翻的情況,從而造成較大的安全隱患。
目前我國的甘蔗轉(zhuǎn)運車主要是引進或仿制,其提升重心偏移大、輪距寬、安全性差,主要適于在平原地區(qū)的蔗地作業(yè),因為地貌環(huán)境和種植方式的差異,不太適于我國丘陵地區(qū)蔗地的作業(yè)。因此,課題組經(jīng)過前期大量的文獻查閱企業(yè)走訪以及實際調(diào)查,設(shè)計了一款適用于丘陵地區(qū)作業(yè)的自行式雙剪叉提升的甘蔗轉(zhuǎn)運車,增強了甘蔗機械化收獲轉(zhuǎn)運的工作穩(wěn)定性、安全性,提高了轉(zhuǎn)運作業(yè)的效率。
目前,國內(nèi)外針對轉(zhuǎn)運車的研究均是在結(jié)構(gòu)設(shè)計方面的改進與優(yōu)化,JOHN DEERE公司研發(fā)制造了采用網(wǎng)兜式、雙搖桿支撐的新型甘蔗轉(zhuǎn)運車;洛陽辰漢農(nóng)業(yè)裝備科技有限公司研發(fā)的網(wǎng)兜式甘蔗轉(zhuǎn)運車,具有操作簡單、機動性和適應性強、適配成本低等特點;中聯(lián)重科股份有限公司研發(fā)的7YGS-10廂式運輸結(jié)構(gòu)的甘蔗田間收集搬運機,配置了高壓共軌發(fā)電機,動力強勁、通過性強、對宿根破壞性小。當前尚缺乏對甘蔗轉(zhuǎn)運車穩(wěn)定性及狀態(tài)監(jiān)測的研究。
轉(zhuǎn)運車的轉(zhuǎn)運工作過程是由舉升、開門、傾倒、關(guān)門、下放等一系列的動作組成,為了驗證雙剪叉式甘蔗轉(zhuǎn)運車的結(jié)構(gòu)穩(wěn)定性,實現(xiàn)對甘蔗轉(zhuǎn)運車進行工作狀態(tài)的實時監(jiān)測,需將采集到的傳感器信號進行識別處理,需選擇較好的轉(zhuǎn)運車狀態(tài)監(jiān)測方法顯得尤為重要。
近年來,隨著人工智能技術(shù)的發(fā)展,基于深度學習的機械設(shè)備狀態(tài)監(jiān)測的方法得到學者的廣泛關(guān)注,廖明燕等[2]利用神經(jīng)網(wǎng)絡(luò)方法對多種傳感數(shù)據(jù)融合的鉆井系統(tǒng)進行狀態(tài)識別,很好地識別了鉆井系統(tǒng)不同的工作狀態(tài);商斌梁等[3]利用小波變換對柴油機缸蓋的振動信號進行時頻處理,再利用圖像處理技術(shù)對時頻圖進行識別,建立了基于圖像匹配的內(nèi)燃機氣閥機構(gòu)診斷模型;王卉[4]等提出一種多源信息融合的神經(jīng)網(wǎng)絡(luò)故障診斷方法,成功應用于對火炮裝填系統(tǒng)故障的診斷。
本文將深度學習方法應用于甘蔗轉(zhuǎn)運車轉(zhuǎn)運過程中的不穩(wěn)定性的監(jiān)測分析中。首先,通過傳感器采集轉(zhuǎn)運車的工作狀態(tài),在轉(zhuǎn)運車關(guān)鍵節(jié)點安裝應變片,獲得不同試驗條件下節(jié)點應力狀況,經(jīng)過應力的數(shù)據(jù)統(tǒng)計分析,建立轉(zhuǎn)運車不同狀態(tài)的判斷標準;然后,通過采用無線壓電加速度傳感器采集甘蔗轉(zhuǎn)運過程中的振動信號,對采集到振動的信號進行數(shù)據(jù)預處理;最后,利用深度置信網(wǎng)絡(luò)構(gòu)建甘蔗轉(zhuǎn)運車轉(zhuǎn)運過程的狀態(tài)監(jiān)測預警模型。
1 轉(zhuǎn)運車試驗平臺及狀態(tài)分類方法
雙剪叉式甘蔗轉(zhuǎn)運車主要由車體、舉升機構(gòu)、集蔗車廂、輔助支撐腳等組成。舉升機構(gòu)安裝于車架上,舉升機構(gòu)包括4對雙剪叉式舉升機構(gòu)以及驅(qū)動裝置和輔助支撐腳。車廂裝置安裝于舉升機構(gòu)上4個輔助支撐安裝在車架下方,車廂采用側(cè)傾卸載方式,便于轉(zhuǎn)運和傾倒甘蔗及肥料等農(nóng)用物資。舉升機構(gòu)采用每對舉升桿的前后移動,來調(diào)節(jié)整體的高度,從而實現(xiàn)上下提升車廂裝置。舉升前先進行車廂的平衡姿態(tài)檢測、輔助支撐的自動調(diào)整;舉升車廂時,液壓油缸驅(qū)動所有的舉升桿向內(nèi)移動,將車廂裝置舉升至指定的高度;傾倒卸載時,驅(qū)動側(cè)檔板油缸打開車廂側(cè)檔板、驅(qū)動車廂底部的油缸,車廂傾斜一定角度,以便于車廂上將甘蔗傾倒至運輸車上;傾倒完畢后,依次驅(qū)動各油缸,使側(cè)檔板、車廂復位,以使舉升下降收回,該轉(zhuǎn)運車簡單便捷,具有重心低和穩(wěn)定性高的優(yōu)點。后輔助支撐腳和前輔助支撐腳固定在車體上,起到增大接觸面積,提高穩(wěn)定性的作用。課題組與企業(yè)合作開發(fā)的甘蔗轉(zhuǎn)運車樣機如圖1所示。
甘蔗轉(zhuǎn)運車的工作過程是由一系列連貫的動作組成,為了能夠描述轉(zhuǎn)運車的工作狀態(tài)和進行轉(zhuǎn)運車不穩(wěn)定性狀態(tài)識別提供參考,本次試驗在轉(zhuǎn)運車關(guān)鍵節(jié)點粘貼應變片以獲取轉(zhuǎn)運車不同試驗下的節(jié)點應變,通過統(tǒng)計分析得到轉(zhuǎn)運車不同工況下受力的特征及狀態(tài)的判別標準,為利用振動信號和深度置信網(wǎng)絡(luò)對轉(zhuǎn)運車工作狀態(tài)識別提供了數(shù)據(jù)基礎(chǔ)。

圖1 樣機雙剪叉舉升試驗圖
1.1 轉(zhuǎn)運車試驗平臺
由于舉升機構(gòu)和集蔗車廂的設(shè)計尺寸較大,為了進行轉(zhuǎn)運車的穩(wěn)定性狀態(tài)的實驗測試,根據(jù)相似性原理,在材料的屈服應力線性階段內(nèi)進行研究分析,將試驗平臺按照樣機設(shè)計的尺寸,將整體縮小為原尺寸的 1/4進行研究,雙剪叉式甘蔗轉(zhuǎn)運車的試驗平臺如圖2所示。
1.2 基于舉升架關(guān)鍵節(jié)點應力分析的轉(zhuǎn)運車狀態(tài)分類方法

圖2 甘蔗轉(zhuǎn)運車試驗平臺
由于上下支撐架、車廂等部位受力較小,主要的受力部件為剪叉舉升桿件,因此將應變測量點布置在舉升桿交叉鉸接點的附近。一共有8根舉升桿,每根舉升桿布置3個測量點,共有24個測量點。采用東華公司的24通道DH3818Y靜態(tài)應力應變測試分析系統(tǒng)采集測試過程中的節(jié)點應力。測點布置如圖3所示。舉升機構(gòu)共有4組舉升桿組成,記車廂傾倒側(cè)為第一組舉升桿,依次第二組、第三組、第四組,第一組測量點標號如圖4所示。
圖4中1-1的 2個1,分別表示標記的第幾個節(jié)點和第幾組桿。
在雙剪叉式甘蔗轉(zhuǎn)運車的 8根桿件上 4組 24個測點分別粘貼應變片,應變片選用的是黃巖測試儀器廠的 BX系列箔式電阻應變計,型號為BX120-3BA,接線端子選用的是黃巖測試儀器廠的板基-911,基地材料是用玻璃纖維增強環(huán)氧樹脂板經(jīng)蝕刻制成,不易損壞,絕緣電阻好。

圖4 第一組測量點標記
應力測量步驟如下:
⑴貼片:將應變片粘貼在轉(zhuǎn)運車關(guān)鍵節(jié)點處;
⑵連接測量電路:將應變直角花和應力應變測試分析系統(tǒng)連接起來,使信號輸送到計算機中;
⑶清零:在每組試驗開始時進行平衡清零;
⑷測試并采集數(shù)據(jù):對每組試驗進行測試,當輸入信號穩(wěn)定時進行數(shù)據(jù)采集,每組試驗結(jié)束時將試驗數(shù)據(jù)保存至指定文件夾。
在每組試驗開始時,需要進行平衡清零以及等到輸入信號穩(wěn)定時再進行數(shù)據(jù)采集,否則無法采集到真實的試驗數(shù)據(jù),每組試驗重復進行3次,確保數(shù)據(jù)的有效可靠性。
分別進行過載舉升試驗與傾斜試驗:
⑴過載試驗
本試驗的試驗變量為舉升載重的質(zhì)量,分別進行舉升載重質(zhì)量為80、100、120、140和160 kg 5個水平的試驗,因變量指標為每個測量點的最大應變,每個水平進行3次重復性試驗。
統(tǒng)計每組試驗數(shù)據(jù),安排3次重復性試驗,取其平均值,試驗數(shù)據(jù)統(tǒng)計如表1所示。

表1 160 kg時各個點的受力統(tǒng)計 單位:MPa
通過上述實驗數(shù)據(jù)統(tǒng)計表分析可知:各桿件中間節(jié)點應力大于上下節(jié)點應力,并且中間節(jié)點應力隨著舉升載重質(zhì)量的增加而明顯增加。
轉(zhuǎn)運車試驗平臺的舉升桿采用不銹鋼 316,其材料的屈服強度≥310 MPa;舉升重量為160 kg時最大應力為256.3 MPa,接近不銹鋼316材料的屈服強度;但由于試驗中,當進行160 kg時,發(fā)生明顯的結(jié)構(gòu)損壞,所以本文將160 kg作為舉升載重的臨界值,將≥160 kg的載重舉升狀態(tài)視為過載狀態(tài)。
⑵傾斜試驗
為模擬在丘陵地區(qū)土地不平情況下的作業(yè)環(huán)境,在試驗平臺上進行傾斜狀態(tài)的應力應變試驗。傾斜試驗中,墊高試驗平臺的一側(cè),使其傾斜一個角度,再進行舉升作業(yè)測試。
將試驗平臺的傾斜角度作為自變量因子,進行單因素試驗,設(shè)置 5個水平,分別為:0°、2°、7°、9.6°、11°。
以傾斜角為0°時、各節(jié)點應力為基準,測出受力最大的中間節(jié)點應力狀態(tài),列出當傾斜角增加時每個節(jié)點相對增加的幅度,如表2所示。

表2 舉升桿受力增加幅度
由表2可見,當傾斜角為2°時,節(jié)點受力平均增幅約為7%左右,最大增幅為13.0%;當傾斜角為7°時,節(jié)點受力平均增幅約為 20%左右,最大增幅為32.9%;當傾斜角為9.6°時,節(jié)點受力平均增幅為30%左右,最大增幅為52.2%;當傾斜角為11°時,節(jié)點受力平均增幅大于40%,有4個點超過50%,最大增幅為65.2%。
根據(jù)項目設(shè)計要求和對表格數(shù)據(jù)統(tǒng)計分析,將車身傾斜 2°作為轉(zhuǎn)運車傾斜需調(diào)整的臨界狀態(tài),將傾斜<2°的情況視為正常狀態(tài)。
2 基于深度置信網(wǎng)絡(luò)的狀態(tài)識別
深度置信網(wǎng)絡(luò)(Deep Belief Network,DBN)于2006年被Hinton等[5]提出,作為一種半監(jiān)督深度學習算法被廣泛關(guān)注。在結(jié)構(gòu)上,DBN由多層限制波爾茲曼機(Restricted Boltzmann Machine,RBM)堆疊構(gòu)成。
2.1 受限玻爾茲曼機模型
RBM 是由一個可見層和一個隱含層組成的二元無向圖模型,包含一組二進制隱藏單元h,一組(二進制或?qū)嵵?可視單元v以及權(quán)值矩陣W,可見單元和隱含單元的偏置b和a。對于RBM的可見層與隱含層,層間神經(jīng)元全連接,而層內(nèi)神經(jīng)元無連接[6]。
受限玻爾茲曼機是基于能量的模型,其聯(lián)合概率分布能量函數(shù)指定。對于一組特定的(v,h),RBM能量函數(shù)的定義為:

其中,vi和hj是可見單元i和隱藏單元j的二進制狀態(tài),θ={w,b,a}是模型的參數(shù),wij是可見單元i和隱藏單元j。
入到可見層時,可見層將決定隱藏層各神經(jīng)元的狀態(tài),隱藏層第j個神經(jīng)元激活概率為:

類似的,可見層第i個神經(jīng)元激活概率為:

慮及所有的神經(jīng)元,模型賦值給一個可見向量的概率是由所有可能的隱藏向量求和得到:

RBM 訓練的目的是求出參數(shù)θ以擬合給定的訓練數(shù)據(jù),最優(yōu)參數(shù)θ^求解方法如下:
其中,hjdata表示一個期望的數(shù)據(jù)分布,hjmodel表示由模型定義的期望分布。在實際應用中,使用對比散度方法計算梯度,即利用吉布斯采樣取代hjmodel。
2.2 基于深度置信網(wǎng)絡(luò)的轉(zhuǎn)運車狀態(tài)識別模型
深度置信網(wǎng)絡(luò)模型結(jié)構(gòu)如圖5所示。通過利用前一層的激活作為輸入,將每一層(從低到高)訓練RBM。具體訓練過程如下所示:首先充分訓練一個RBM 的權(quán)重和偏移量,適用其隱層神經(jīng)元的狀態(tài),作為第二個 RBM 的輸入向量;接著充分訓練第二個RBM后,將第二個RBM堆疊在第一個RBM的上方,以此類推,重復以上步驟直至達到預設(shè)的次數(shù)。多個 RBM 堆疊模型訓練結(jié)束后,在網(wǎng)絡(luò)上頂層增加一個 Softmax分類層并通過反向傳播算法對轉(zhuǎn)運車工作狀態(tài)進行分類。

圖5 深度置信網(wǎng)絡(luò)結(jié)構(gòu)[7]
Softmax回歸模型作為邏輯回歸模型的一種拓展形式,常用于多分類問題[8]。對于m個樣本的k類訓練數(shù)據(jù){(x(1),y(1),(x(2),y(2),···(x(m),y(m))},其中樣本集為對于給定的樣本輸入x,估算出類別j的概率值如式⑹所示:

其中,θ=[θ1,θ2,···,θk]為模型參數(shù),過對概率分布進行歸一化,使得所有概率之和為1。
Softmax模型對應的損失代價函數(shù)如式⑺所示:

Softmax回歸模型是監(jiān)督學習模型,通過誤差反向傳播法來迭代更新參數(shù)使得代價函數(shù)最小化,從而找到最優(yōu)參數(shù)以適應訓練集。
3 轉(zhuǎn)運車狀態(tài)監(jiān)測試驗實例
3.1 轉(zhuǎn)運車狀態(tài)監(jiān)測試驗
由于實際尺寸的轉(zhuǎn)運車比較大,為了研究監(jiān)測轉(zhuǎn)運車狀態(tài)的方法和減小試驗難度,在預設(shè)置的轉(zhuǎn)運車尺寸上等比例縮小4倍;采用振動監(jiān)測法,通過一個壓電式加速度傳感器采集加工過程中的振動動態(tài)數(shù)據(jù),傳感器的布置如圖6所示。壓電式加速度傳感器為東華測試公司的通用壓電式加速度傳感器,試驗過程中,采用DH3816N數(shù)據(jù)采集裝置采集動態(tài)信號,采樣頻率設(shè)置200 Hz。采集的動態(tài)數(shù)據(jù)選取每組試驗舉升到最高點的15 s作為一個轉(zhuǎn)運車采集樣本,轉(zhuǎn)運車狀態(tài)分為正常、車體傾斜和過載狀態(tài)等3種狀態(tài)。
壓電加速度傳感器獲得的各狀態(tài)的振動信號時域波形如圖7所示。
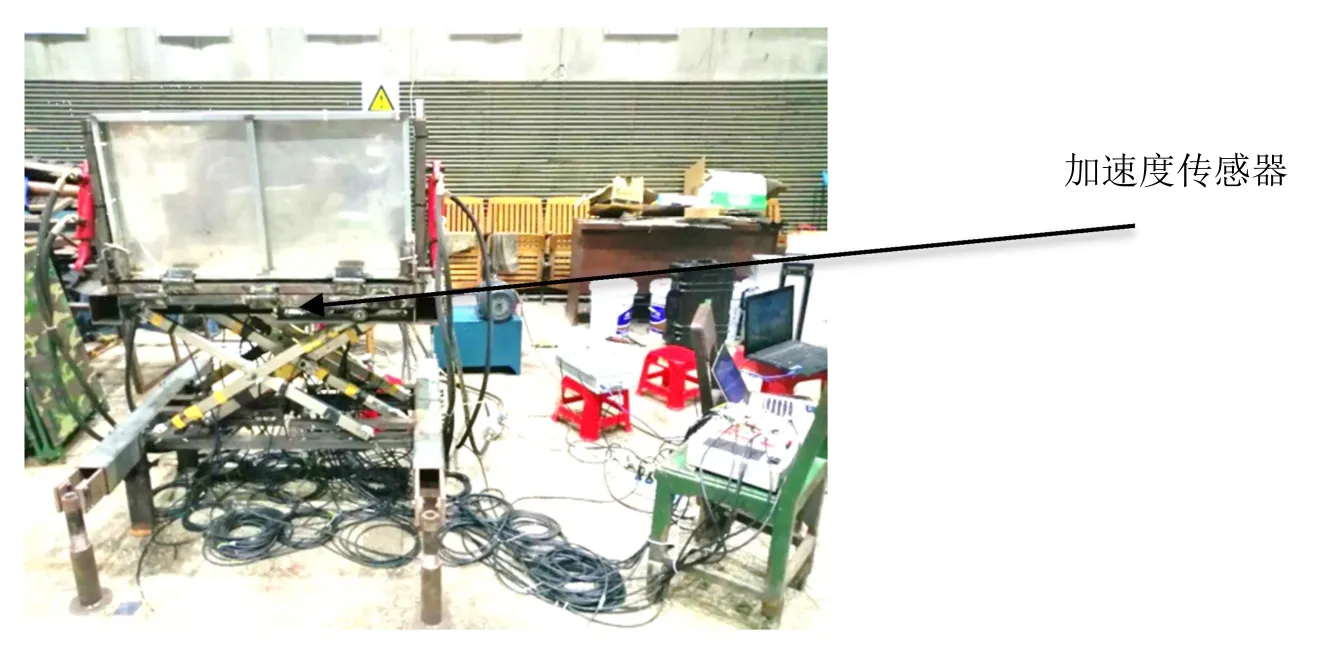
圖6 轉(zhuǎn)運車狀態(tài)監(jiān)測試驗平臺及傳感器安裝圖
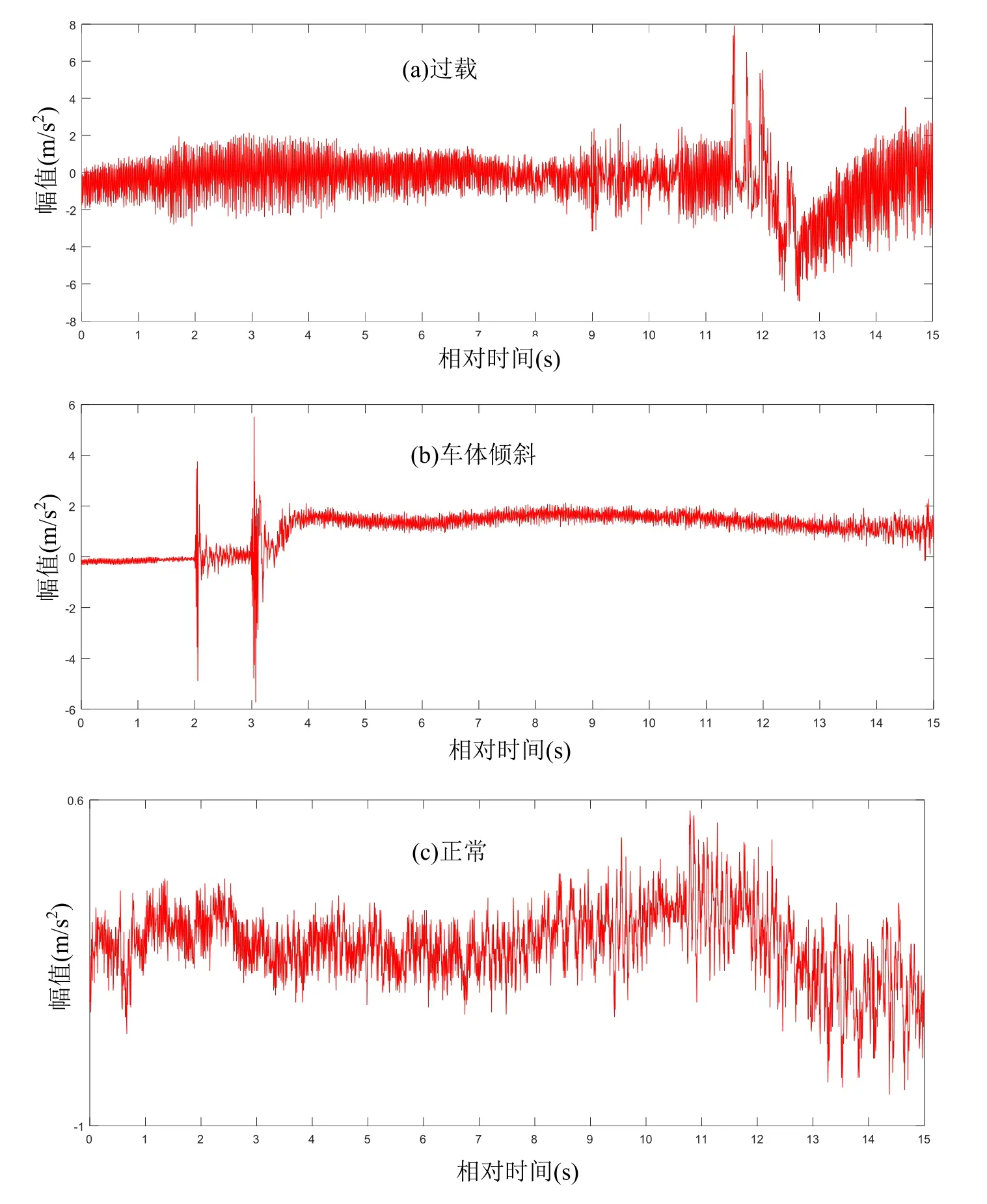
圖7 轉(zhuǎn)運車不同狀態(tài)下振動信號時域波形
3.2 數(shù)據(jù)預處理
在轉(zhuǎn)運試驗平臺的試驗過程中,采用壓電加速度傳感器采集振動信號,通過數(shù)據(jù)預處理后輸入到轉(zhuǎn)運車狀態(tài)監(jiān)測模型,數(shù)據(jù)預處理過程框圖如圖8所示。
3.2.1 數(shù)據(jù)不平衡處理

其中,S'為加噪后的轉(zhuǎn)運車過載信號,S為未加噪的過載信號,k為加噪的強度參數(shù),n=1,2,···,N用于控制加噪的不同強度,σ為樣本的標準方差。不平衡處理前后數(shù)據(jù)個數(shù)見表3。

圖8 數(shù)據(jù)預處理流程圖

表3 不平衡處理前后數(shù)據(jù)個數(shù)
針對圖7(a)的一條過載振動信號,添加3種高斯白噪聲后的振動信號時域圖如圖9所示。
3.2.2 振動信號特征提取
本文所指的特征提取是對振動信號進行時域和頻域內(nèi)的特征提取,將提取后的特征輸入到 BP神經(jīng)網(wǎng)絡(luò)和SVM,將2種網(wǎng)絡(luò)的轉(zhuǎn)運車狀態(tài)監(jiān)測與本文所提出的基于 DBN的轉(zhuǎn)運車狀態(tài)識別方法進行性能對比。
特征提取能夠在表征轉(zhuǎn)運車狀態(tài)信息的同時顯著減少原始數(shù)據(jù)的維度、降低網(wǎng)絡(luò)訓練所耗費的時間[9]。本文對采集的動態(tài)信號進行特征提取,分別提取動態(tài)信號的時域、頻域以共16個特征。
選取時域內(nèi)峰值、峭度等12個時域特征、頻域范圍內(nèi)平均頻率、重心頻率等4個頻域特征,提取的部分訓練數(shù)據(jù)具體的16個時域、頻域特征如表4所示。
3.2.3 歸一化
為消除某些相對其他輸入樣本特別大或特別小的樣本矢量在訓練過程中產(chǎn)生的不良影響,對提取到的信號特征進行歸一化處理:

其中,X'為歸一化后的數(shù)據(jù),Xmax為某一特征數(shù)據(jù)的最大值,Xmin為同一特征數(shù)據(jù)的最小值。
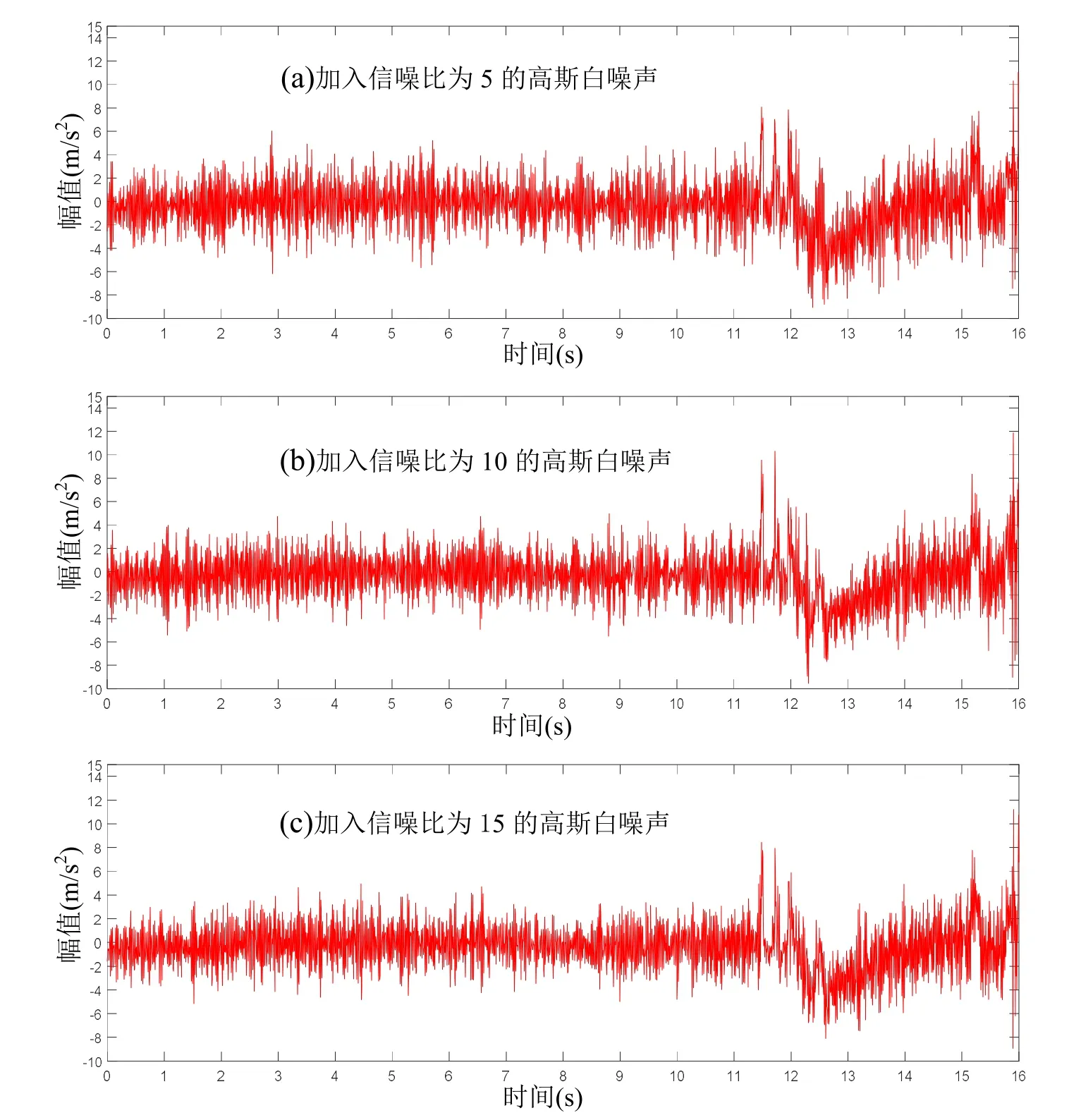
圖9 加入3種高斯白噪聲后的過載振動信號

表4 提取部分訓練數(shù)據(jù)信號特征數(shù)值
3.3 轉(zhuǎn)運車狀態(tài)監(jiān)測實例
在構(gòu)建深度置信網(wǎng)絡(luò)結(jié)構(gòu)過程中,需要分別確定網(wǎng)絡(luò)深度、神經(jīng)元節(jié)點數(shù)等網(wǎng)絡(luò)參數(shù),但目前深度置信網(wǎng)絡(luò)的結(jié)構(gòu)構(gòu)建尚無成熟的經(jīng)驗和理論[10]。理論上隨著網(wǎng)絡(luò)層數(shù)、節(jié)點數(shù)增加,神經(jīng)網(wǎng)絡(luò)從數(shù)據(jù)中挖掘隱含信息的能力也會增強,但容易出現(xiàn)過擬合,并顯著增加計算成本。
本文通過試驗嘗試不同網(wǎng)絡(luò)結(jié)構(gòu)的深度置信網(wǎng)絡(luò),設(shè)置振動信號時域圖片大小為385*1000,輸入節(jié)點數(shù)為38500個數(shù)據(jù)點,最終確定隱含層層數(shù)為2,隱含層節(jié)點數(shù)分別為100、30,輸出層節(jié)點數(shù)為3。將輸入樣本按照8∶2的比例劃分成訓練集和測試集,轉(zhuǎn)運車的3種狀態(tài)共46個樣本用于訓練網(wǎng)絡(luò),11個樣本用于測試網(wǎng)絡(luò)。過載、車體傾斜和正常測試樣本數(shù)分別為2、5和4。深度置信網(wǎng)絡(luò)與訓練過程迭代次數(shù)設(shè)置為100,學習率為0.01,動量為0,批次大小為 1。反向微調(diào)過程中,迭代次數(shù)設(shè)置為100,學習率為0.01,動量設(shè)置為0。損失函數(shù)為:

深度置信網(wǎng)絡(luò)的損失函數(shù)變化曲線如圖10所示。
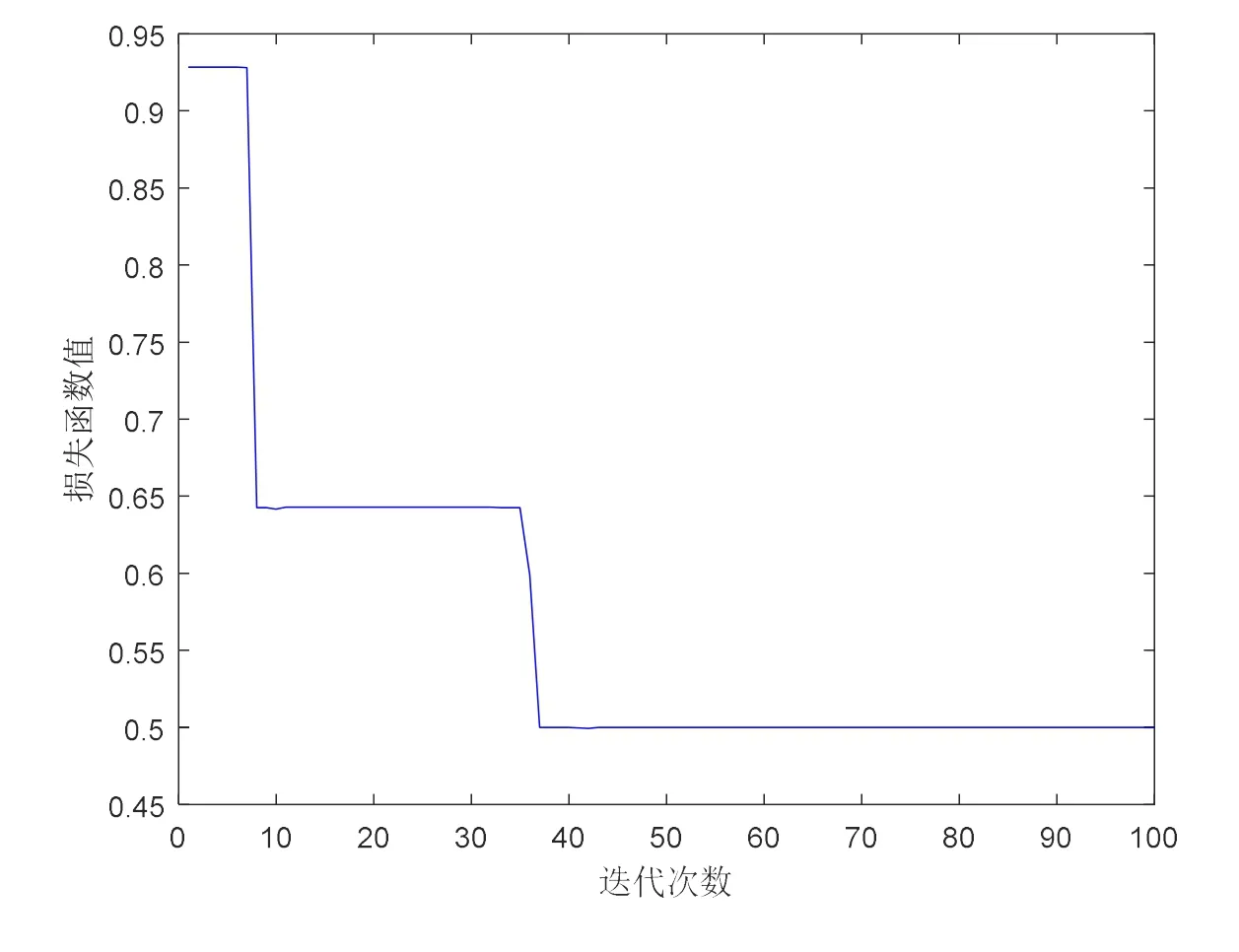
圖10 深度置信網(wǎng)絡(luò)損失函數(shù)圖
由圖10可以看出,當?shù)螖?shù)達到40代時,損失函數(shù)基本趨于穩(wěn)定、保持不變,可作為迭代種植的參考。
運用MATLAB軟件對深度置信網(wǎng)絡(luò)進行設(shè)計、訓練。對網(wǎng)絡(luò)進行5次訓練并計算轉(zhuǎn)運車狀態(tài)監(jiān)測準確度的平均值,選取BP算法、SVM算法與深度置信網(wǎng)絡(luò)轉(zhuǎn)運車狀態(tài)監(jiān)測模型進行對比,BP算法的迭代次數(shù)選擇與深度置信網(wǎng)絡(luò)相同的100次,46個訓練樣本與11個測試樣本,學習率為0.01,動量為0,批次大小為1。SVM算法選擇RBF核函數(shù),利用交叉驗證方式確定主要的參數(shù)c(懲罰因子)與g(不敏感系數(shù)),最大迭代次數(shù)設(shè)置為 100。訓練及預測結(jié)果如表5所示。
由表5可見,由于DBN算法的數(shù)據(jù)集是圖像,比使用數(shù)值數(shù)據(jù)集的BP算法與SVM算法在訓練時消耗的訓練時間要多12~16 s,但在測試時,三者的測試時間在幾乎相同;在算法精確度方面,DBN算法在測試集上的準確率達到了 90.90%,時間為0.13 s;不僅在整體準確度上高于其它算法,而且在轉(zhuǎn)運車處于過載和車體傾斜2種狀態(tài)下的平均準確度DBN算法表現(xiàn)也很優(yōu)秀,可達到100%。

表5 3種狀態(tài)檢測方法性能對比
4 結(jié)語
轉(zhuǎn)運車的穩(wěn)定安全有利于提高甘蔗轉(zhuǎn)運的工作效率,提高甘蔗生產(chǎn)全程機械化,對于丘陵地區(qū)特殊的種植環(huán)境,對導致轉(zhuǎn)運車不穩(wěn)定的過載和車體傾斜危險狀態(tài),能夠準確及時地檢測出并進行調(diào)整顯得尤為重要,深度置信網(wǎng)絡(luò)作為一種半監(jiān)督深度神經(jīng)網(wǎng)絡(luò),通過與訓練-微調(diào)的訓練模式,可以有效減少帶標簽樣本量的需求并且避免陷入局部極小點。利用轉(zhuǎn)運過程中振動信號,通過數(shù)據(jù)預處理后訓練深度置信網(wǎng)絡(luò)作為轉(zhuǎn)運車工作狀態(tài)監(jiān)測模型,可以有效地對轉(zhuǎn)運車工作狀態(tài)進行現(xiàn)場實時準確判別,平均準確率達到90.90%,對過載、傾斜2種危險狀態(tài)的識別可達100%,較其它常規(guī)分類算法準確度有較好提升,在轉(zhuǎn)運車不穩(wěn)定性狀態(tài)檢測方面具有一定的優(yōu)勢,可為甘蔗轉(zhuǎn)運車工作狀態(tài)的實時監(jiān)控提供理論于技術(shù)基礎(chǔ)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年11期)2020-12-14 06:59:52
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00