IGS RTS鐘差數據中斷的實時修復方法研究
2021-05-11 03:40:56范士杰彭秀英顧宇翔
測繪工程 2021年3期
范士杰,崔 凱,彭秀英,顧宇翔
(中國石油大學(華東)海洋與空間信息學院,山東 青島 266580)
從2013年4月1日起,IGS實時服務(Real-Time Service, RTS)正式發布運行。RTS實時鐘差產品是針對廣播星歷鐘差的改正,播發格式為RTCM-SSR(RTCM State Space Representation),基于NTRIP(Networked Transport of RTCM via Internet Protocol)協議,通過Internet方式向全球實時播發[1]。目前,IGS的ESA,BKG等分析中心均可實時播發RTS鐘差產品,且各分析中心對其發布的產品進行了精度評定,結果表明衛星鐘差的精度優于0.3 ns[2-3]。IGS RTS實時數據流產品,現已廣泛應用于實時精密單點定位(Real-Time Precision Point Positioning, RT-PPP)[4-6]、實時GNSS水汽反演[7-8]等方面。但是,由于網絡傳輸等各種不確定性因素,RTS實時數據流產品普遍存在數據中斷現象,嚴重影響用戶使用和定位精度。臧建飛等采用“插值修復”方法,對RTS數據中斷進行修復,極大地改善了數據的可用性。但是“插值修復”是一種事后處理方法,增加RTS數據的時延,無法滿足RT-PPP的實時性需求[9]。宮曉春等提出一種基于一次差分的一次多項式鐘差改正數預報算法,利用IGS03數據流產品分別進行30 s、1 min和5 min的鐘差預報試驗,預報結果均能滿足RT-PPP的精度要求[10]。但是,隨著預報時長的增加(如5 min),該算法與常用的多項式模型、灰色模型的預報效果相近。
針對RTS中斷數據修復的實時性問題,本文基于衛星鐘差預報算法,提出實時“預報修復”方法,即利用預報的鐘差數據實時地修復中斷缺失的數據。利用BNC軟件連續接收4種RTS綜合產品(IGC01、IGS01、IGS02、IGS03),通過對RTS產品衛星鐘差數據中斷區間分布的統計分析,確定5 min為預報修復的時間窗口;基于“預報修復”方法,采用改進的灰色系統模型進行實時預報修復實驗;最后以IGS事后精密衛星鐘差產品為參考,對修復的衛星鐘差數據和產品(24 h)進行精度分析,以驗證該方法的可行性。
1 基于灰色系統模型的鐘差預報方法
灰色系統模型是通過對原始數據進行累加或累減運算,生成新的數據序列;然后對新數列建模,進行數值預報的方法。其中,灰色GM(1,1)模型是灰色系統模型中最常用的模型,它由一個僅包含單一變量的一階微分方程所構成,適合對自身數據進行預報。RTS衛星鐘差的變化以單調遞增或者遞減為主,符合灰色系統模型的建模條件[11]。
為進一步提升灰色系統模型預報的穩定性,一些學者對上述模型進行了改進[12-15]。本文采用殘差修正方法[12],對灰色系統模型預報的鐘差值進行改正,流程圖如圖1所示,具體步驟如下:

圖1 基于改進GM(1,1)模型的衛星鐘差預報流程
1)首先利用原始衛星鐘差序列,構建衛星鐘差的GM(1,1)預報模型;
2)根據GM(1,1)預報模型,計算衛星鐘差的預測值;
3)利用衛星鐘差的預測值序列,求出鐘差預報模型的殘差修正值序列,并由此建立殘差修正值的GM(1,1)預報模型;
4)利用殘差的GM(1,1)預報模型計算殘差預測值,并將其加入到衛星鐘差的預測值上,即可得到殘差修正的衛星鐘差預測值。
2 RTS鐘差數據中斷的實時預報修復
2.1 初始數據和鐘差預報時間長度的選擇
“預報修復”時所采用的初始數據時間長度和數值預報時間長度的選擇至關重要。初始數據的時間長度與模型的初始化時間有關,時間長度過長會對PPP的實時性產生影響。而隨著預報時間的增長,模型預報精度也會隨之下降,從而影響到鐘差數據修復的精度。對2017年1月6日到2017年1月12日連續7 d 4種RTS鐘差產品的中斷區間分布進行統計,結果如表1所示。發現4種RTS鐘差產品5 min以內的數據中斷均在97%以上,說明RTS鐘差產品的數據中斷主要以5 min以內的短區間中斷為主。

表1 4種RTS鐘差產品的中斷區間分布統計 min
以2017年1月6日的IGS02產品為例,利用不同時間長度的初始數據,分別進行20 min、15 min、10 min、5 min時長的鐘差預報。以IGS事后精密鐘差產品(30 s)為參考,采用二次差的方法[3]統計出不同預報模式的鐘差的均方根誤差(RMS),如表2所示,表中預報模式欄中短橫線“-”前方數字表示初始數據時間長度,后方數字表示預報時間長度。從表2中可以看出,鐘差預報精度隨著預報時長的增加而降低,尤其是預報時長大于初始數據時長的情況;對于5 min的預報時長,不同初始數據時長的預報效果接近,RMS均低于0.37 ns。
綜合上述分析,本文選擇鐘差預報的初始數據時間長度為10 min、預報時間長度為5 min。具體的RTS鐘差產品預報修復方案為:當RTS數據流有中斷時,選取中斷歷元前10 min的數據,作為預報的初值,建立衛星鐘差的GM(1,1)模型,并進行最長5min的數值預報,以修復中斷的鐘差數據。
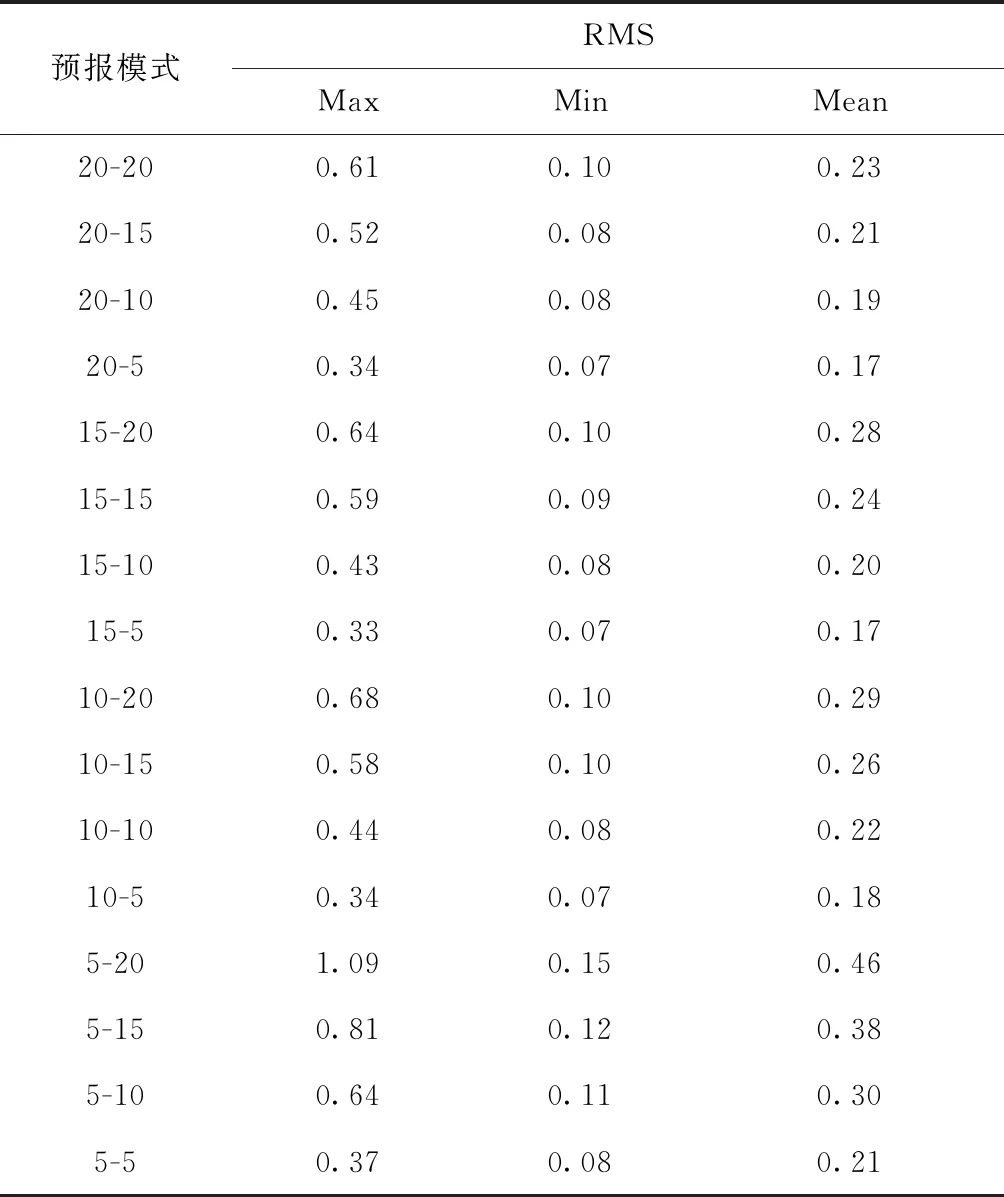
表2 不同時長的鐘差預報精度(RMS)統計 ns
需要注意的是,如果中斷區間的時長不足5 min,“預報修復”自動停止;考慮到鐘差預報的精度,對于極少數超過5 min的數據中斷,本文不進行預報修復,其原因將在2.2結合實時修復試驗進行說明。
2.2 IGS02鐘差產品的實時修復
1)預報修復值的精度分析。仍以IGS02鐘差產品為例,對2017年1月6日到2017年1月12日連續7 d所有衛星發生數據中斷的歷元進行預報修復。以2017年1月9日到2017年1月11日的數據為例,修復前后的數據中斷情況對比如圖2所示。圖2中有“點線”標志的地方為產生數據中斷的歷元,空白區域為有鐘差數據的歷元。由圖2(a)—圖2(c)可知,由于網絡傳輸的不穩定性等原因,IGS02鐘差數據出現大量的短區間中斷(<5 min),其中大部分情況為某些歷元全部衛星同時產生數據中斷,也存在某些歷元部分衛星產生數據缺失的現象,個別衛星(如PRN3、PRN4)甚至出現較長時間的數據中斷,嚴重破壞鐘差產品的連續性。預報修復后,IGS02鐘差產品的數據連續性和可用性得以明顯改善,消除了短區間中斷,僅殘留少數超過5 min的區間中斷以及較長時間的數據中斷,如圖2(d)、圖2(f)所示。由于超過5 min的數據中斷所占比例很低,而個別衛星鐘差數據的缺失不會對RT-PPP的連續性和定位精度造成明顯影響,故本文對于超過5 min的數據中斷,也只進行5 min的預報修復。

圖2 修復前后的鐘差數據中斷對比
對上述連續7 d IGS02鐘差產品發生數據中斷歷元的預報修復值,采用二次差的方法[3]與IGS事后精密衛星鐘差產品(30 s)進行比較和精度評價。圖3為所有衛星每天發生數據中斷歷元的預報修復鐘差相對于IGS精密衛星鐘差的均方根差(RMS),可知全部衛星連續7 d的預報修復鐘差的RMS均在0.5 ns以內。表3給出上述預報修復鐘差RMS的誤差統計,修復鐘差的平均RMS均在0.17 ns以內,實時“預報修復”方法的效果得以驗證。

圖3 所有衛星每天預報修復鐘差的精度(RMS)

表3 所有衛星每天預報修復鐘差的精度(RMS)統計 ns
2)修復前后24h鐘差產品的精度對比。采用“預報修復”方法,對24 h鐘差產品的數據中斷進行實時修復,形成完整的鐘差產品。以IGS事后精密鐘差(30 s)為參考值,對連續7 d修復前后的IGS02鐘差產品(24 h)進行精度對比,如圖4所示。對于修復前IGS02鐘差產品即原始IGS02鐘差產品,提取采樣間隔為30 s的IGS02鐘差數據與對應歷元IGS事后精密鐘差進行對比并進行精度評定,其中存在數據中斷的歷元不參與鐘差RMS的計算。而修復后的IGS02鐘差產品,則是利用原始鐘差數據和預報修復的鐘差數據來進行鐘差RMS的計算。由圖4可知大部分衛星修復前后的RMS沒有明顯差異;雖然個別衛星數據中斷修復后的RMS有所增大,但所有衛星數據中斷修復后的RMS均在0.22 ns以內。表4給出連續7 d IGS02鐘差產品(24 h)修復前后RMS的誤差統計,從表中可以看出,修復前后每天24 h鐘差產品的RMS基本一致,所有衛星鐘差的RMS均在0.22 ns以內,每天所有衛星鐘差的平均RMS均在0.12 ns以內。實時“預報修復”方法,不僅解決了RTS數據中斷問題,保證RTS鐘差產品的可用性和實時PPP的連續性,而且符合RT-PPP對衛星鐘差數據的精度要求。

表4 24 h鐘差產品所有衛星修復前后的精度(RMS)統計 ns
3 結束語
IGS RTS數據的連續性是滿足RT-PPP應用的關鍵。針對RTS中斷數據修復的實時性問題,本文基于鐘差預報算法,提出實時“預報修復”方法。利用連續7 d的RTS鐘差產品,基于“預報修復”方法,采用改進的灰色系統模型對發生數據中斷的歷元進行實時修復。以IGS事后精密衛星鐘差產品(30 s)為參考,連續7 d的IGS02鐘差產品,預報修復鐘差的平均RMS優于0.17 ns,預報修復后24 h完整鐘差產品的RMS均在0.22 ns以內。“預報修復”方法實現RTS數據中斷的實時修復,極大地改善了RTS鐘差數據的連續性,且中斷修復后的鐘差數據的精度與RTS鐘差產品的標稱精度基本一致,可以滿足RT-PPP的實時性應用需求。

圖4 24h鐘差產品所有衛星修復前后精度(RMS)對比
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
Coco薇(2015年1期)2015-08-13 02:23:50
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
玩具(2009年10期)2009-11-04 02:33:14
個人電腦(2009年9期)2009-09-14 03:18:46