基于遺傳算法和支持向量機的汽車行駛工況識別
2021-05-13 04:19:56董小瑞武雅文張志文李曉杰
車用發動機 2021年2期
董小瑞,武雅文,張志文,李曉杰
(中北大學能源動力工程學院,山西 太原 030051)
新能源汽車在實際工作中,復雜和多變的行駛工況會對汽車控制策略產生干擾,造成汽車的能耗經濟性下降。如果可以根據工況實時調整汽車能量管理控制參數,那么就可以提高汽車對路況的適應能力,并使汽車的動力性能及節能效果達到最優[1-6]。因此準確地識別行駛工況變得至關重要,可為新能源汽車后續的能量管理策略制定打下堅實的基礎。當前國內外針對工況識別進行了大量的研究。姜超等[7]依據混合動力地下鏟運機的工作特點,采用可能性C均值聚類算法對鏟運機的5種典型工況進行了識別,但是該算法容易受聚類中心初始值的影響,且該算法時間開銷很大;孫蕾等[8]選取了3類標準循環工況,并提取了11個特征參數為訓練數據,建立了學習向量量化(LVQ)神經網絡工況識別模型,而神經網絡對樣本容量有依賴性;Chen等[9]基于模糊邏輯控制在線校正算法對短期未來行駛工況進行預測,但是模糊算法中的隸屬度函數大多靠經驗選擇,需要反復調試。
針對上述問題,本研究選擇支持向量機(SVM)算法對行駛工況進行識別,SVM在非線性分類、模式識別上有著廣泛的應用,識別精度高,泛化能力強,但是識別效果上受SVM模型相關參數的影響。而遺傳算法具有強大的全局搜索能力,可以在很短的時間搜索到全局最優點,所以為了提高支持向量機算法的識別精度,本研究將遺傳算法優化和SVM算法相結合,優化模型參數,建立優良的行駛工況識別模型。
1 理論基礎
1.1 支持向量機識別算法

(1)
式中:ω為權值向量;b為閾值。
對于數據中的異常點,SVM算法通常進行軟間隔處理,為此需要引入負松弛因子ξi和懲罰系數C(控制松弛程度),優化問題轉化為
(2)
為解決上述線性約束凸優化問題,通常轉化為拉格朗日對偶函數求解[10]:
(3)
解得最優分類平面為

(4)
式中:a*為最優解。
對于非線性問題,通常引入一個核函數將原數據映射到一個高維空間中。定義核函數:
K(xi,xj)=(φ(xi))Tφ(xj)。
(5)
在識別算法中應用最廣泛的核函數為高斯徑向基函數:
K(xi,x)=exp(-g‖xi-x‖2)。
(6)
式中:g為核函數寬度,只需把原問題的(xi·xj)替換為K(xi·xj)即可解決。
懲罰系數C和核函數寬度g的取值對支持向量機的識別精度有很大的影響,因此需要找到最優的C和g值。
1.2 基于遺傳算法優化的SVM識別算法
遺傳算法(GA)是模擬自然界生物進化現象發展起來的隨機全局搜索優化方法,把搜索空間映射為遺傳空間[12]。將可能的解編碼成一個染色體,每個染色體通過選擇、交叉和變異三種算子來進行操作運算,整個種群在優勝劣汰的進化機理下進化發展,直到進化到最優狀態。遺傳算法具有極強的搜索精度和求變功能,并且不易陷入局部最小值。
本研究提出基于遺傳算法優化的支持向量機行駛工況識別算法(GA-SVM),算法流程見圖1。
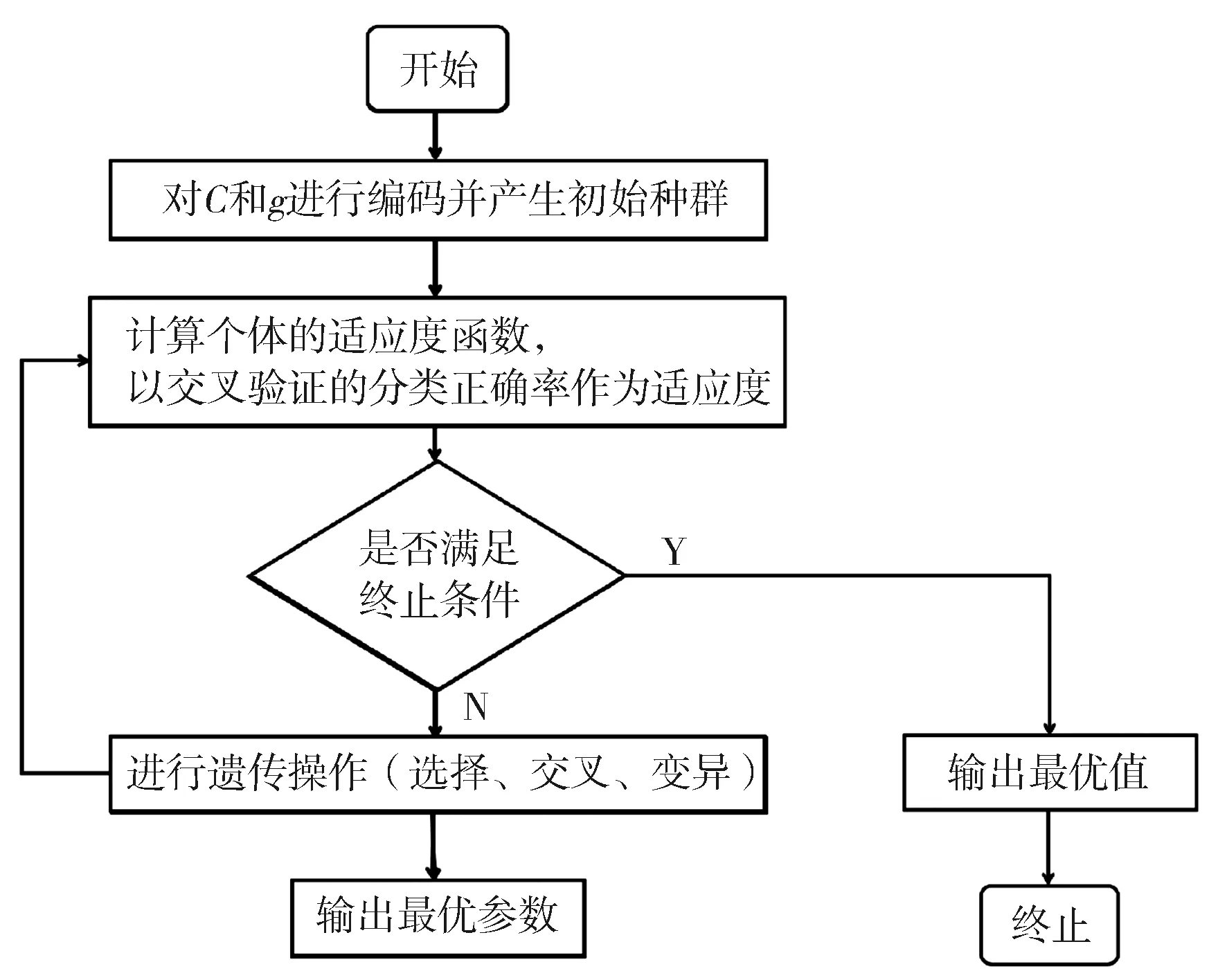
圖1 GA-SVM算法流程
GA-SVM算法的基本步驟如下:
1) 網格搜索法粗搜索,設定懲罰因子C和核函數寬度g的搜索范圍和步長,合適的步長有助于縮短搜索時間。
2) 根據網格搜索法,通過交叉驗證法,得到粗搜時最優的C*和g*值,作為下一步遺傳算法尋優的依據。
3) 編碼:設定遺傳算法尋優參數的范圍,其中C的范圍為[mC*,nC*],g的范圍為[mg*,ng*],并采用二進制編碼。
4) 生成初始群體:隨機產生M個初始個體。
5) 計算個體的適應度:以支持向量機交叉驗證法的分類準確率作為評價每個個體適應度的指標。
6) 選擇,交叉,變異。
7) 終止條件判斷:設定迭代次數,當迭代次數達到T時,終止運算,輸出最優解。
2 行駛工況處理
2.1 數據采集
在行駛工況識別的研究中,一般將城市工況分成4類典型工況,即擁堵工況、城區工況、郊區工況和高速路工況[5]。1)擁堵工況:大部分集中在城市繁華地帶,怠速時間長,啟停頻繁,汽車平均速度低;2)高速路工況:行駛在高速公路上,交通暢通,汽車車速高,行駛距離長;3)郊區工況:位于城市郊區,啟停少,巡航時間占比較高,行駛時間較長;4)城區工況:主要集中在城市的生活區,交通流量較大,啟停較為頻繁,怠速時間較長。本研究將這類典型工況分別標記為1,2,3,4。
本研究以某城市為例,使用一輛輕型汽車在該城市的4類典型工況實際路段采集工況數據(采樣頻率為1 Hz),從采集設備上讀取CAN信號中的GPS速度、行駛時間、加速度,扭矩百分比等信號,并保存在電腦中進行后續處理。
2.2 數據處理
本研究計劃采集4類典型工況各100條行駛工況運動學片段,即汽車從怠速狀態開始至下一個怠速狀態開始之間的車速區間,每條片段應同時包含怠速、加速、減速、巡航這四種運動狀態,且每種狀態至少持續4 s。
由于汽車行駛數據的采集設備直接記錄的原始數據會包含一些不良數據值,需要對原始數據進行預處理,包括對異常值的刪除、缺失值的補齊和噪聲的濾波等,超長怠速時間段也需要剔除。處理后的4個典型工況運動學片段見圖2。
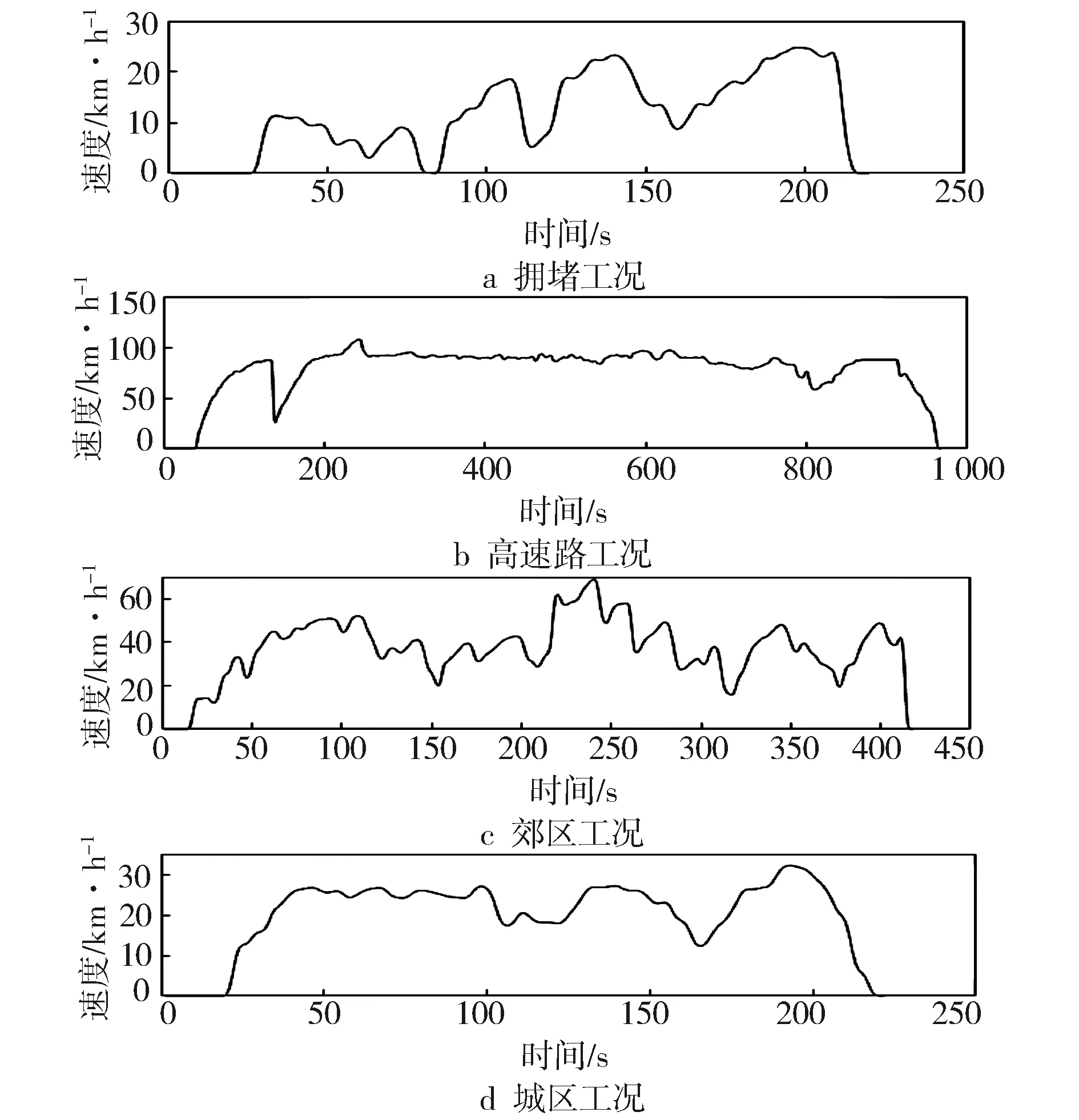
圖2 典型行駛工況運動學片段
2.3 提取特征參數
為了保證行駛工況識別的準確率,需要足夠并有效的工況識別特征參數,這些特征參數既要反映車輛運行特性,又要反映速度波動特性。原則上選取的特征參數數量越多,描述行駛工況特征信息的能力也就越強,但是計算時間也越長,而數量過少會導致工況信息描述不準確[13]。因此,在前人研究的基礎上,選取14個特征參數描述各典型工況運動學片段(見表1)。
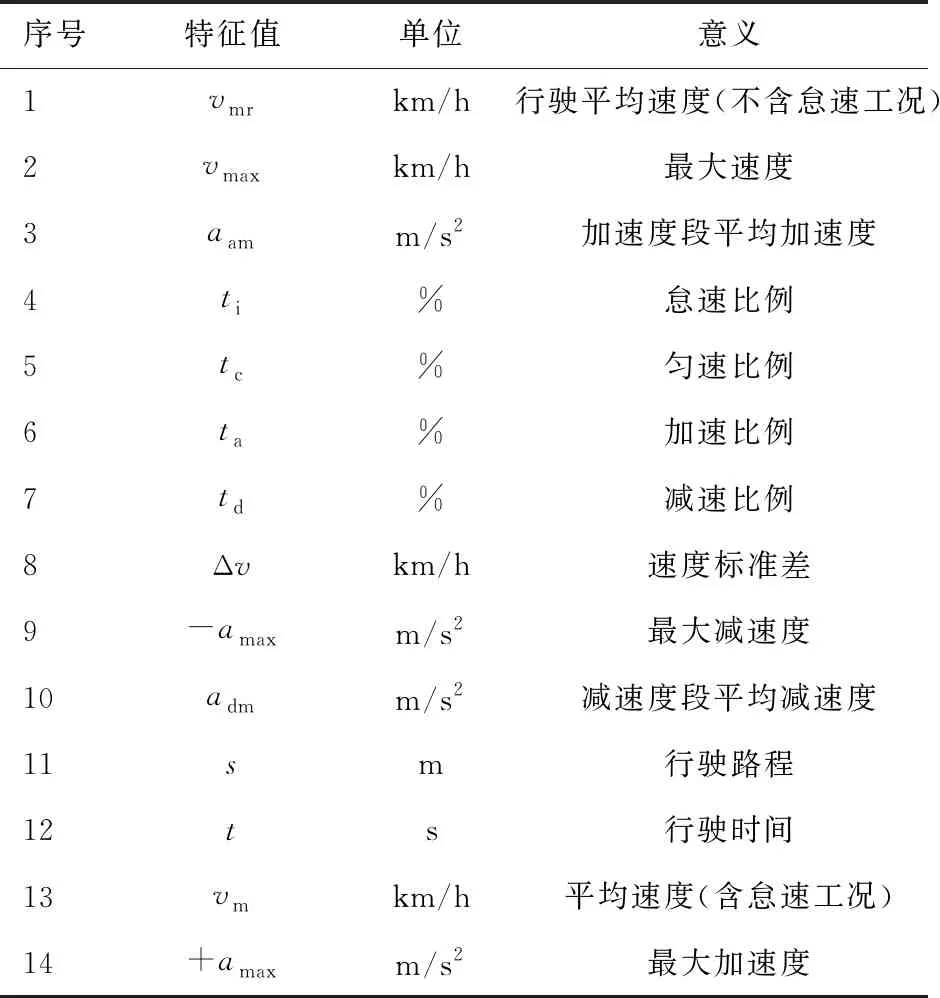
表1 汽車行駛工況特征參數
2.4 主成分分析
通過選取的14個特征參數對工況運動學片段特征進行表述,但如果直接使用這14個參數對運動學片段進行分類,計算時間長且處理繁瑣,故需要找出這14個參數之間的關聯性,將表述信息重疊的參數歸為一類。這就需要利用主成分分析法(PCA)對其進行降維處理,主成分分析法是利用線性變換相關知識,使用少數幾個相互無關的變量代替原來的多個變量,并且可以綜合反映原始數據的大部分信息。具體步驟如下。
1) 對原始數據進行標準化處理。
本次試驗共采集了400條行駛工況運動學片段,每條運動學片段都有14個參數對其進行描述,即構成了一個400×14型的矩陣Z,將矩陣Z進行標準化處理。
2) 判斷各個變量之間的相關性,計算各個數據之間的相關系數。
由標準化后的矩陣Z計算得到協方差矩陣C,并進一步計算得到相關系數矩陣R。
3) 計算相關系數矩陣的特征值。
求得相關系數矩陣R的特征值,并按從大到小順序進行排列。
4) 計算主成分貢獻率和累計貢獻率。
本研究采用SPSS軟件對400個行駛工況運動學片段的14個特征參數數據庫進行主成分分析(PCA),得到14個主成分特征值和累計貢獻率(見表2)。
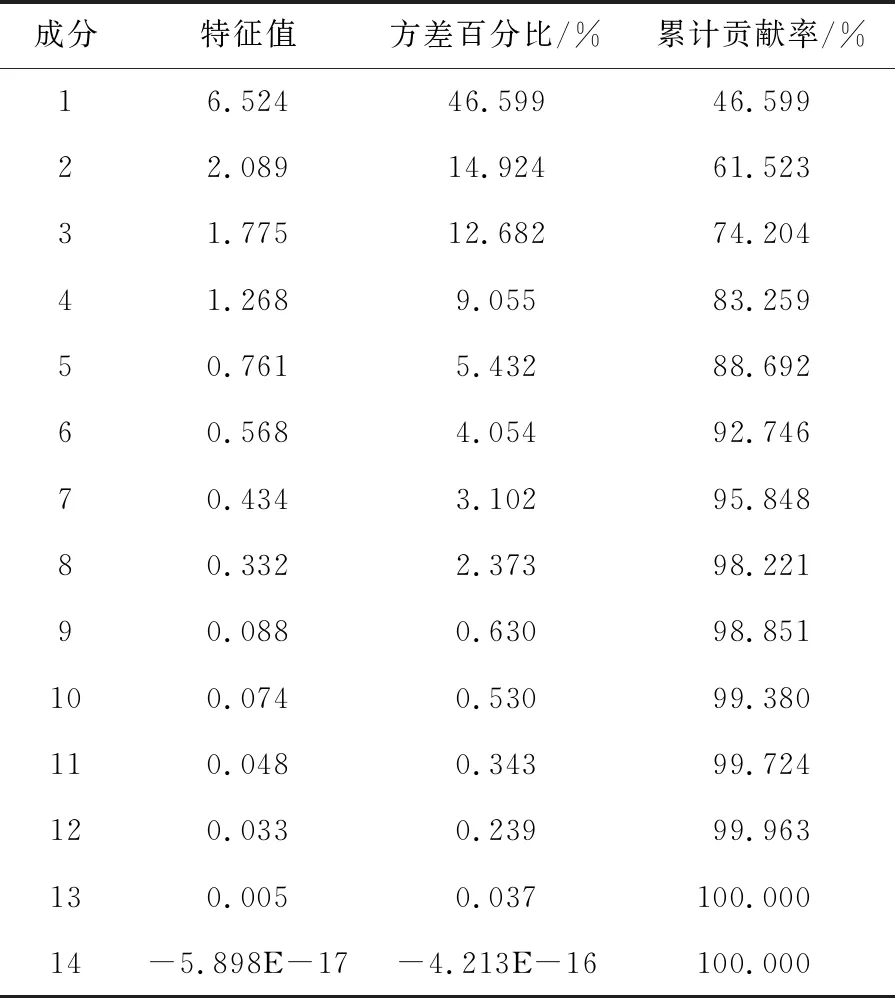
表2 各主成分特征值及貢獻率
表2中的特征值是主成分原始特征參數信息的表示,該值越大,對應的主成分包含原有的14個特征參數信息就越多。當主成分的特征值小于1時,一般不會采用,因為當特征值小于1時說明此主成分表達的信息不如原有的一個特征參數所表達的信息充分,達不到降維目的[14-15]。故選用主成分時,一般采用特征值大于1的成分。從表2看出,前4個主成分的特征值都大于1,且累計貢獻率為83.259%,超過了80%,說明這4個主成分就能代表原有的14個特征參數充分表達工況特征信息,因此,選擇前4個主成分作為GA-SVM識別算法的輸入參數。
3 模型訓練及仿真分析
本研究以行駛平均速度、最大速度、加速度段平均加速度、怠速比例作為GA-SVM算法的輸入參數,從400個行駛工況運動學片段中隨機抽取80%作為訓練樣本來訓練并建立識別模型,剩下的20%作為測試樣本來驗證識別模型的精度。
首先基于網格搜索法建立SVM識別算法模型,將C,g分別以2為底的指數離散,設置為C∈[2-4,24],g∈[2-4,24],進行網格尋優,取識別精度最高時所對應的C,g值作為最優值。網格搜索法的尋優過程見圖3。

圖3 網格搜索法尋優3D圖
由圖3可以得出,此時最優值C=8,g=1,最優識別精度為94.06%。這種算法的80個隨機測試樣本的識別結果見圖4,由圖可見,測試樣本有5個樣本被錯誤識別。

圖4 網格搜索法SVM分類結果
在此基礎上,使用遺傳算法進行優化,將種群數量設置為20,最大進化次數設置為50,此時GA-SVM的尋優過程見圖5。

圖5 GA-SVM算法的尋優過程
由圖5得出,此時最優值C=5.35,g=0.93,最優識別精度為97.5%。測試樣本的識別結果見圖6,由圖可見,測試樣本中有3個樣本被錯誤識別。
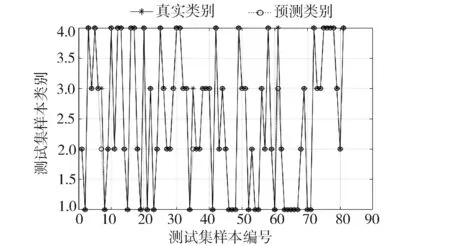
圖6 GA-SVM算法分類結果
經過對比,基于GA-SVM算法的行駛工況識別精度相較于網格搜索尋優算法的識別精度提高了3.44%,并且得到了更小的懲罰系數C。在保證識別精度的前提下,C值過大會導致過學習的情況發生,從而降低了識別模型的泛化能力,而C值越小,泛化能量就越強。仿真結果表明,運用基于遺傳算法優化的支持向量機識別模型可以很好地識別行駛工況類型。
4 結束語
在某城市的擁堵工況、城區工況、郊區工況、高速路工況這4種典型工況的道路進行實車行駛工況數據采集并進行處理,定義了14個特征參數來描述行駛工況特性,然后利用主成分分析理論對特征參數進行降維處理,提取出4個有效表征行駛工況的特征參數。
在網格搜索法的基礎上,提出基于遺傳算法優化的支持向量機行駛工況識別算法,并通過仿真試驗驗證得知此方法在網格搜索法的基礎上將識別精度提高了3.44%,同時改善了C值過大導致過學習的情況。所研究的分類模型可以用于新能源電動汽車能量管理策略的開發。