缽苗移栽機自動送苗裝置研究現狀及展望
2021-05-17 12:08:40肖名濤孫松林
農業工程與裝備 2021年1期
方 芹,肖名濤,孫松林,劉 奇,陳 斌
(湖南農業大學機電工程學院,湖南 長沙 410128)
隨著我國經濟高速發展, 城市化范圍擴大,工業、商業、住房占地面積日益增加,人均可耕地面積正逐年減少,農村勞動力流失嚴重,而市場對糧食和經濟作物的需求總量卻日漸增加,農作物產量可持續增長成為農業發展的主要難題[1]。目前,我國由于缺乏土地資源與勞動力資源,難以依靠增加耕種面積來大幅度提升作物產量,只能采取品種改良和推廣新農藝等方法提高作物產量[2-3]。而作物移栽能夠充分利用光熱資源,提升復種指數和作物的單產,具有對天氣的補償作用和使作物生長提前的綜合效益,是我國提升作物產量的重要手段[4-6]。過去,農民移栽作物時大部分工作環節都是依靠人力完成,導致工作強度大、勞動力需求大、作業效率低、被移栽作物的產量低;目前,國內廣泛使用的是半自動移栽機,作業時靠人工送苗,作業效率仍然不高、勞動力需求仍然較大、機械化效益較低,很難達到現代農業規模化生產的目標;未來,全自動移栽機是必然發展趨勢。缽苗移栽技術發展的重點是提高移栽效率、節約勞動力資源。隨著我國經濟高速發展,在農業勞動力大量轉移和可耕土地資源緊缺的背景下,傳統的農機具已不足以滿足現代農業發展的需求,因此研究全自動移栽機成為缽苗移栽技術發展的重中之重。
為了解決自動移栽機人工送苗裝置存在的一系列難題,研究缽苗移栽機自動送苗裝置是大勢所趨。自動送苗裝置是自動移栽機的重要組成部分,可將缽苗精準地移到取苗位置,在取苗機構將缽苗取出后自動移動缽苗盤并等待取苗機構進行下一次取苗。送苗裝置的設計對移栽機的工作效率、移栽質量以及勞動成本有很大的影響[7]。自動送苗裝置對缽苗移栽機作業機械化水平的提高乃至現代農業的發展都具有重要意義。本項目組對國內外現有的缽苗移栽機自動送苗裝置進行了研究和分析,以便于下一步開展缽苗移栽機自動送苗裝置的設計與試驗。
1 缽苗移栽機自動送苗裝置的類型
目前,缽苗移栽機自動送苗裝置的分類根據取苗裝置差異而定,按驅動模式和定位系統的不同主要分為機械驅動及定位、機電氣控制及定位、視覺系統定位3種類型[8]。
1.1 機械驅動型送苗裝置的特點及原理
機械驅動型送苗裝置控制苗盤的橫向和縱向間歇運動,其結構主要由凸輪、鏈輪、往復式絲杠組成。這種純機械結構的送苗裝置對零件的加工精度要求極高,機械結構復雜,對各機構間工作同步性要求高,可能因為制造精度與使用磨損導致產生累計誤差,進而影響移栽質量[9]。
1.2 機電氣控制型送苗裝置的特點及原理
機電氣控制型送苗裝置由控制電機或者氣缸來實現送苗裝置的橫向和縱向運動,其結構主要由控制系統、電機組成。該類型送苗裝置的優點是提高了送苗精度,裝置的控制系統與拖拉機的速度配合嚴密,保證了移栽苗之間株距的穩定性,解決了傳統缽苗移栽機取苗和送苗之間的干涉問題,可以適應大田作業環境[10]。
1.3 視覺系統定位型送苗裝置的特點及原理
視覺系統定位型送苗裝置的結構主要由視覺定位系統、輸送系統和控制系統組成[11]。視覺系統的作用是獲取圖像和分析圖像并將獲取到的圖像以及分析過的圖像信息加以處理,如圖1所示[12]。將視覺系統應用于缽苗移栽機的自動送苗裝置,可以根據識別到的信息智能識別是否為空穴或者壞苗。利用攝像機、圖像采集卡和圖像處理器等設備搭建視覺系統平臺,如圖2所示。通過算法運算自動識別空穴或者壞苗后,由處理器處理識別出空穴和壞苗[13]。相對于另外2種類型的送苗裝置,這種類型的送苗裝置具有智化程度高、作業效率高、作業效果好等優點。機器視覺型送苗裝置的識別系統對機器震動敏感,會影響到機器視覺識別的精度[14]。
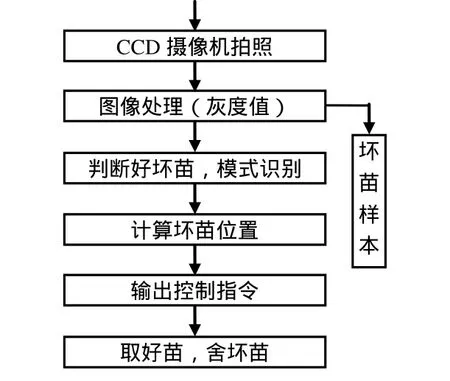
圖1 基于機器視覺的壞苗識別系統流程

圖2 機器視覺監測系統的硬件結構框圖
2 國內外自動送苗裝置研究現狀
國外研究缽苗移栽機較早。20世紀初,歐洲發達國家研究并制造出了適用于蔬菜生產的秧苗移栽機具,這種移栽機具采用人工送苗;20世紀 30年代末至 40年代初期,研制出了送苗裝置并逐步代替人工送苗,使送苗入土的過程實現了機械化;20世紀50年代至60年代,研制出了多種不同結構型式的半自動移栽機和用于育苗的土缽制缽機;20世紀 80年代,各種半自動移栽機、制缽機形成了完整的產品系列,并且廣泛應用于農業生產。
我國研究缽苗移栽機已有 30多年的歷史,目前移栽作業機具仍然以半自動移栽機為主[5]。半自動移栽機的出現,一定程度上有效緩解了農業生產中人工移栽勞動強度大、效率低、用工量大等難題,但仍然存在以下問題:使用半自動移栽機,必須在人工送苗的情況下才能完成作業;人工送苗過程中速度不能太快,工作時間較長,操作者容易疲勞,易造成漏苗現象[6];人工送苗的速度不夠快和移栽過程中勞動力需求量過大,制約了缽苗移栽機械的大面積應用[15-16]。研制缽苗移栽機自動送苗裝置將提高整個移栽機械的效能和價值[17]。基于缽苗移栽機對農業生產的價值,研究與設計缽苗移栽機是發展現代農業必不可少的工作。而研究與設計自動送苗機構,是缽苗移栽機發展的關鍵。
2.1 機械驅動型送苗裝置
國外研究機械驅動型自動送苗裝置的時間較長,研究成果較多,市場上許多缽苗移栽機的送苗裝置采用的就是純機械驅動。目前我國純機械驅動全自動缽苗移栽機的相關研究較少,很多機械驅動型的自動送苗裝置機械結構復雜、移栽效率不高。機械驅動型送苗裝置的結構主要由凸輪、鏈輪、往復式絲杠組成,主要是采用橫向與縱向送苗方式。這類送苗裝置的機械結構較復雜,零件加工精度和裝配要求高。
國外主要的代表機型為洋馬公司生產的 PF2R型乘坐式全自動蔬菜移栽機,如圖3所示。其送苗裝置為橫向與縱向送苗,采用純機械驅動。此送苗裝置的原理是:由雙螺旋凸輪軸實現橫向往復送苗;縱向送苗則是由雙螺旋凸輪軸一側的凸輪帶動棘輪,再由棘輪傳遞到鏈條,最后帶動鏈條上的缽苗來實現[18]。采用這種送苗方式的還有井關公司生產的PZP-80型全自動蔬菜移栽機,如圖4所示。

圖3 PF2R型乘坐式全自動蔬菜移栽機

圖4 PZP-80型全自動蔬菜移栽機
2011年,KUMAR等[19]研究出一種全自動蔬菜移栽機。該移栽機主要是針對移栽過程多種因素影響缽苗漏栽率與成活率等問題,采用帶定時軸、凸輪和離合器等自動送苗機構,可實現垂直方向運送多株缽苗,移栽結果表明該機的缽苗漏栽率較低、直立度率較高、栽植質量良好。
國外純機械驅動的送苗裝置對工件的加工精度要求高,機械機構較為復雜,對各機構間工作同步性要求高,可能會因為制造精度與使用磨損導致產生累計誤差,進而影響移栽質量。此種移栽機送苗裝置的加工精度要求高,機械結構復雜,且送苗效率較低。
國內其主要的代表機型有浙江理工大學裘利鋼等[20]2012年設計的一種橫向和縱向送苗機構。此裝置缺點是設計復雜,機械結構復雜,精度要求高,但未能測試出高速移栽狀態下的控制精度。
河南科技大學金鑫等[21],2016年設計了一種純機械傳動式蔬菜移栽穴盤苗自動輸送裝置。該裝置的取苗速度高達 140株/min,且取苗成功率超過95%,滿足移栽農藝要求且遠超人工移栽效率。
東北農業大學薛向磊等[22],2020年設計了一種棘輪連桿式缽苗移栽機縱向送苗機構,如圖5所示。此送苗裝置橫向送苗原理是撥桿跟著雙向螺旋軸運動,棘輪、連桿等跟著秧箱做往復橫向運動。此送苗裝置的縱向送苗原理是連桿將動力傳至驅動臂,再由驅動臂帶動驅動桿運動,驅動桿帶動棘輪轉動,棘輪驅動送秧鏈輪轉輪齒槽,限定棘輪及送秧鏈輪的驅動轉角,復位彈簧帶動機構回復原位。此送苗裝置的送苗成功率高達99.17%。相對比國外純機械驅動的送苗裝置,此送苗裝置的結構簡單,定位準確,且對累積誤差有一定補償作用[23]。

圖5 縱向送苗方案
國內純機械驅動的送苗裝置的機械結構由復雜轉向簡單,降低了工藝制作難度;送苗運動時機構的運動軌跡由復雜轉向簡單,同時減小了缽苗的損失率。
2.2 機電氣控制型送苗裝置
機電氣控制型自動送苗裝置采用電機或者氣缸等驅動,精準實現自動送苗。機電氣控制型自動送苗裝置對取送苗的控制精確,實際作業過程中操作方便,移栽精度高。
國外的主要代表機型是日本井關公司研發的PVHR2-E18型缽苗移栽機[24],如圖 6所示。此移栽機采用苗杯輸送鏈形式送苗,苗杯附著在鏈條上,鏈輪帶動鏈條進行轉動,當苗杯運動到落苗口時,觸發開關控制缽苗落下,最后到栽植器,完成送苗。

圖6 井關 PVHR2-E18型缽苗移栽機
荷蘭飛梭公司生產的 PC-21 溫室移栽機,如圖7所示。動力來源于氣缸和電機。其取送苗裝置采用四針式取苗爪進行取送苗,由氣缸控制取苗爪的抓取與釋放動作。

圖7 PC-21 型自動移栽機
以上機械采用機、電、氣控制技術的移栽機送苗裝置,送苗動作相對簡單,適用范圍廣,移栽效率和成活率較高,穩定性好,但其體積龐大,成本高[25]。
國內主要的代表機型有江蘇大學胡建平、楊麗江[26]等 2011年設計的一種乘坐式蔬菜缽苗全自動移栽機。該裝置采用了PLC控制電磁閥,驅動氣缸實現橫向間歇輸送穴盤;采用步進電機通過鏈條實現縱向間歇平行輸送。該裝置由 PLC控制取苗部件,實現自動取送苗。試驗表明該裝置的移栽頻率達到70株/min,其綜合栽植成功率高達96%。
石河子大學的張海蕓[27]于2017年設計了實用性較強的玉米移栽機自動送苗裝置;馬銳[28]于2018年研究出整排夾持式穴盤苗移栽機取送苗裝置;李樹峰[29]于2019年研制出整排取送苗裝置。石河子大學研發的這三類移栽機送苗裝置一步步實現了步進電機的精準定位,提高了送苗效率和送苗精度。
西南大學的宋磊[30]于 2020年設計了一種穴盤苗取投送苗裝置,如圖8所示。該裝置應用機電一體化原理,通過步進電機、環形軌道、鏈條、鏈輪等實現一系列運動,包括穴苗盤橫向及縱向移動、取苗爪斜插式取投苗動作、循環送苗動作。對比荷蘭飛梭公司生產的 PC-21 溫室移栽機,此送苗裝置可以實現穩定高效地取投苗過程,減少穴苗損傷率,提高移栽存活率,同時簡化整個機械機構,達到輕簡而又高效的目的。但此送苗裝置的自動化程度低于荷蘭飛梭公司生產的 PC-21 溫室移栽機。
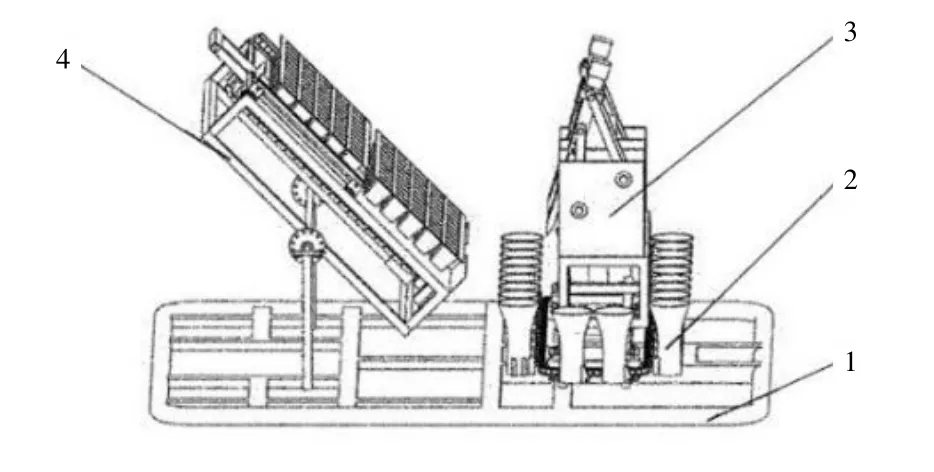
圖8 送苗裝置結構圖
國內的機、電、氣驅動的送苗裝置與國外相比,存在機、電、氣成本高,送苗時定位準確率低的問題。通過不斷地研究和探索,我國機、電、氣定位的缽苗移栽機送苗裝置的結構往輕簡化發展,送苗定位的準確率提高,從而提高缽苗移栽機送苗的成功率。
2.3 視覺系統定位型送苗裝置
視覺系統定位型自動送苗裝置不僅可以降低漏栽率提高移栽效果,而且還可以提高移栽效率。視覺系統定位類型的自動送苗裝置因其高度的智能化,可以保證植入缽苗的直立度從而提升缽苗的成活率。因為視覺技術在全自動移栽機的應用還處于初級階段,且對機器震動敏感,價格昂貴,目前還未得到大規模的研究與應用。
國外主要代表的機型是荷蘭VISSES公司生產的Pic-O-Mat GR-2700型自動化溫室穴盤移栽機,其送苗裝置采用視覺定位的方式進行工作,如圖 9所示。其控制系統由上位機和PLC組成,通過機器視覺系統實時采集缽苗的圖像并處理,根據識別結果驅動PLC控制電機再帶動苗盤運動,當到達指定位置時取苗手取苗。機器視覺系統具有較為靈敏的識別功能,可以識別出苗盤的狀態,提高送苗精度,加快送苗速度;缺點是機器識別對于移栽裝置的振動敏感,影響其識別精度,所以暫時無法運用到大田作業中。

圖9 Pic-O-Mat GR 2700型自動化溫室穴盤移栽機
ALBERTUS J V V等[31]于2004年研究出一種運用特有視覺識別系統的移栽機。這種移栽機可以同時運送多盤苗盤,并且可以實現補苗和移缽功能,提高移栽成功率。
意大利 Ferrari公司開發了具有機器視覺功能的Futura型全自動移栽機。該移栽機設計了缺苗檢測裝置,其取苗裝置采用成排取苗的方式,缽苗取出后放入投苗裝置,使用激光對射式光電傳感器檢測移栽機投苗裝置中是否有缽苗,有苗時投苗裝置把缽苗放入栽植機構,無苗時投苗裝置直接轉過[32]。國外對視覺定位型的移栽機送苗裝置研究時間久,發展較快,視覺技術相比國內成熟,智能化程度高。同時,研究的視覺定位型移栽機功能廣泛,取送苗定位精度高,有效提高了送苗精度和送苗效率。
國內主要代表的機型有江蘇大學魏新華等[33]于 2016年設計的一套穴盤苗全自動移栽機,如圖10所示。該裝置采用步進電動機驅動實現苗盤橫向進給運動,伺服電動機驅動實現取苗機械手縱向往復運動。該裝置采用圖像采集與處理系統進行取送苗,該系統能夠識別苗株是否健康,然后協調控制系統決定是否移栽。此移栽機的取/放苗速度為每行40株/min),在整機單行移栽39.9株/min的平均移栽速度下喂苗成功率達到96.9%。該裝置提高了取苗定位精度和輸苗柔性度,減少了缽苗基質損失,改善了移栽效果。

圖10 移栽機結構示意圖
浙江大學王永維等[34]于 2018年設計了穴盤苗缺苗檢測系統。該系統對獲得的擬南芥穴盤苗彩色圖像進行判斷,確定穴孔是否有苗。
中國農業大學的張甘等[35]于2020年研究了基于maxIOU算法的快速自動移植器中白菜苗體缺陷的識別。得出結論maxIOU算法在基板和苗區分割中精度高。缺陷識別算法對白菜幼苗的缺陷識別精度高,具有良好的實時性能,可應用于高速現場移植器。
國內視覺系統定位型送苗裝置的研究起步晚,但發展較為迅速,與國外視覺系統定位移栽機相比,取送苗精度和智能化程度都較低,缺點主要體現在視覺定位的功能單一,精度低,檢測效果一般。
3 送苗裝置存在的主要問題
根據對國內外送苗裝置現狀分析得出,國內學者研究的移栽機送苗裝置基本由一個直流電機提供動力,通過機械結構改變動力輸出的方向來實現橫向與縱向送苗,這類送苗裝置機械結構普遍較為復雜。國外機構主要著眼于機械式送苗裝置與非機械式送苗裝置的研究。機械式送苗裝置機械加工精度高,送苗效果好,送苗效率高,但成本過高,在國內暫時無法廣泛推廣;非機械式送苗裝置采用整排送苗的方式實現送苗,這類送苗裝置不能進行大田移栽作業。
現階段我國移栽機自動送苗裝置主要存在以下3個問題。
(1) 移栽機自動送苗裝置作業效率低。國內研究出的送苗裝置普遍存在智能化程度低、機具的精度不高、依舊需要人工參與等問題。
(2) 移栽機自動送苗裝置機具結構復雜,成本較高。國內研究出的送苗裝置機械結構復雜,加工精度較高,導致成本高,無法大范圍推廣,商用性能較低。
(3) 移栽機自動送苗裝置通用性差。國內研究出的送苗裝置基本上都有其特定的工作環境以及工作對象,機具的適應性不佳。
4 對策與展望
(1) 現有國家政策極力扶持農業機械行業,科研工作者要抓住發展的好時機,在國家政策的扶持下,結合我國的基本國情,基于我國現有的農業機械研究基礎,大力開展全自動移栽機送苗裝置的創新研究,利用先進加工制造工藝,提高零部件的質量,提高全自動移栽機的工作效率和可靠性,降低操作者的勞動強度,減少操作者的勞動時間。
(2) 我國的人均 GDP還達不到發達國家的水平,農民的資金有限,如何簡化農業機具,提高農業機具的適應性,讓每一個農民都能用上便利的現代農機設備成為現代農業發展的新目標。在研究全自動移栽機時,除了保證移栽機具有高技術含量的同時,還要具備價格便宜、操作便利等優點。政府也可以制定相關的新型農業機具補貼政策,鼓勵農民主動購買和學習如何操作新型農業機具。目前,現代農業進入了高速發展的新時代,現代智能化農場成為發展趨勢,通過國家政策的導向和農機部門的配合,可以推廣規范化移栽種植,促進集約化機械化生產。
(3) 從現代農業發展的趨勢來看,研制出可以適用于各種作物移栽的移栽機送苗裝置意義重大。新型的移栽機送苗裝置將具備高度自動化、智能化等特點,并且擁有較高的自適應性能和通用性,因此視覺系統定位型自動送苗裝置的全自動移栽機將成為未來研究的熱點。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
科技傳播(2019年22期)2020-01-14 03:06:54
電腦報(2019年40期)2019-09-10 07:22:44
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
汽車工程學報(2017年2期)2017-07-05 08:13:02
