大高差困難地區(qū)多平臺(tái)影像建模融合處理方法
2021-05-18 11:27:36孫保燕張小可姚學(xué)杰黃邦偉
遙感信息 2021年2期
關(guān)鍵詞:區(qū)域
孫保燕,張小可,姚學(xué)杰,黃邦偉
(桂林電子科技大學(xué) 建筑與交通工程學(xué)院,廣西 桂林 541004)
0 引言
多平臺(tái)融合是時(shí)代發(fā)展的趨勢(shì)。利用各個(gè)平臺(tái)的優(yōu)勢(shì)解決大高差困難地區(qū)的區(qū)域建模往往受制于環(huán)境、地形、天氣、設(shè)備因素的影響。如何高效、高精度地建立大高差困難地區(qū)的地理信息模型,一直都是低空傾斜攝影的研究重點(diǎn)。
國(guó)內(nèi)外的多平臺(tái)融合常見(jiàn)的有旋翼無(wú)人機(jī)和單反相機(jī)、旋翼無(wú)人機(jī)和固定翼無(wú)人機(jī)的平臺(tái)融合,如孫保燕等[1]利用旋翼無(wú)人機(jī)和相機(jī)融合,提出了一種空地結(jié)合的方式,用于文物保護(hù)的精細(xì)化建模;陳蘋(píng)[2]結(jié)合固定翼無(wú)人機(jī)和旋翼無(wú)人機(jī)的特點(diǎn),解決了大區(qū)域建模的難題;李亞?wèn)|等[3]提出利用固定翼無(wú)人機(jī)搭載高精度RTK獲取較為精確的影像姿態(tài)數(shù)據(jù),構(gòu)建出大比例尺的帶狀河道地形地貌。在重疊度和匹配算法上,Ajay等[4]使用一種影像低重疊度,借助Photoscan完成精度匹配;涂繼輝等[5]提出了一種自動(dòng)檢測(cè)和解決高空影像陰影的算法。在大高差航線(xiàn)規(guī)劃上,大都為KML模式的地形跟隨方式來(lái)規(guī)劃立面的航線(xiàn),對(duì)無(wú)人機(jī)的性能要求和地圖精度都有一定的限制,如鄒楊等[6]提出了有機(jī)分布正射航線(xiàn)和傾斜航線(xiàn)的方法在大高差鐵路工程施工中的應(yīng)用;馮威[7]利用無(wú)人機(jī)仿地飛行,解決了高寒高海拔困難地區(qū)的勘測(cè)問(wèn)題。
本文利用無(wú)人機(jī)傾斜攝影的方法,對(duì)不同像元尺寸相機(jī)拍攝的圖像進(jìn)行融合做了探究。利用固定翼和旋翼無(wú)人機(jī)有機(jī)融合可以突破旋翼無(wú)人機(jī)飛行時(shí)長(zhǎng)的限制,解決固定翼無(wú)人機(jī)無(wú)法近距離拍攝的問(wèn)題。本文對(duì)空中三角測(cè)量點(diǎn)云融合作了理論分析,研究一種大高差航攝分區(qū)的公共接邊方法和高效率解決空中三角測(cè)量出現(xiàn)的不匹配的情況。利用公共接邊區(qū)域的控制點(diǎn)進(jìn)行二次空三可消除曝光點(diǎn)接近基線(xiàn)過(guò)短的影像,能夠快速匹配傾斜影像。
1 技術(shù)流程
本文的技術(shù)流程如圖1所示。
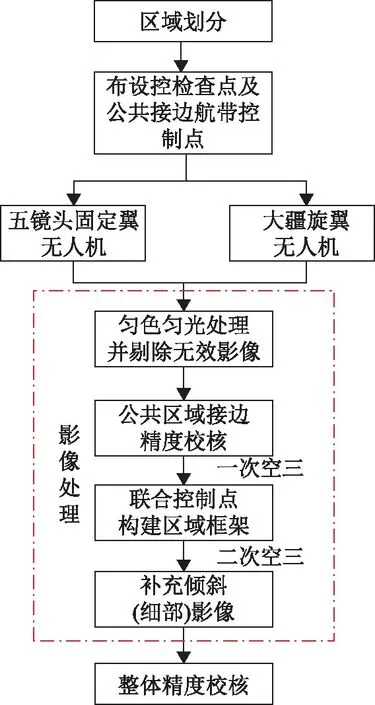
圖1 技術(shù)流程圖
2 案例分析
該縣城境內(nèi)三面高山環(huán)繞,主要的山峰高度超過(guò)1 000 m。以縣城為中心測(cè)區(qū)面積約為15 km2,如圖2所示,上方的白色區(qū)域?yàn)榇蠼盹w行區(qū)域,飛行高度為200 m、航向重疊率75%、旁向重疊率60%、搭載相機(jī)為DJI FC6310。飛行28個(gè)架次獲取9 578張照片。下方的黃色區(qū)域?yàn)楣潭ㄒ盹w行區(qū)域,采集照片五鏡頭固定翼飛控平臺(tái)為飛宇Panda3,飛行高度為450 m,相機(jī)搭載SONY ILCE-5100,飛行3個(gè)架次獲取16 145張照片,通過(guò)勻色勻光處理剔除無(wú)效照片為1 146張,照片的有效使用率為95.5%。通過(guò)RTK對(duì)布設(shè)區(qū)域布置24個(gè)檢查點(diǎn),如圖2所示位置為黃色的點(diǎn)。圖2中灰色點(diǎn)為旋翼無(wú)人機(jī)和固定無(wú)人機(jī)公共接邊的控制點(diǎn)。圖3所示為旋翼無(wú)人機(jī)和固定翼無(wú)人機(jī)飛行高度導(dǎo)致航帶存在大高差的情況。

圖2 航測(cè)區(qū)域圖
在大疆旋翼無(wú)人機(jī)和五鏡頭固定翼無(wú)人機(jī)連接處對(duì)大落差航帶公共接邊進(jìn)行了分析,在公共接邊區(qū)域設(shè)置了4個(gè)公共點(diǎn)(用紅線(xiàn)注明)和5個(gè)檢查點(diǎn)作為公共接邊區(qū)域精度核定,驗(yàn)證是否滿(mǎn)足公共接邊地區(qū)的標(biāo)準(zhǔn)。
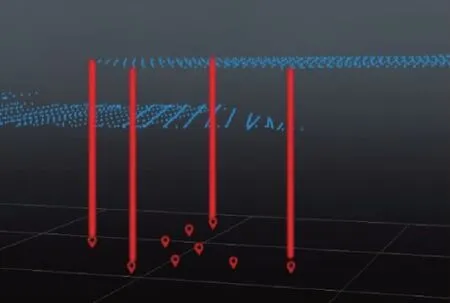
圖3 公共區(qū)域接邊公共點(diǎn)和檢查布置圖
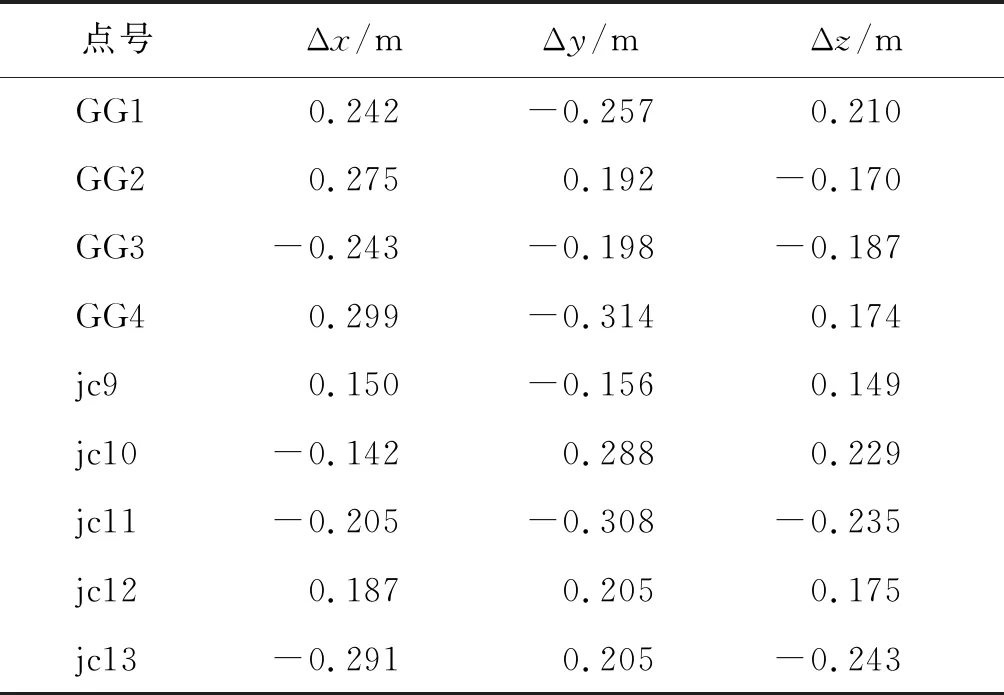
表1 公共接邊區(qū)域控點(diǎn)誤差表
考慮到固定翼無(wú)人機(jī)和旋翼無(wú)人機(jī)的像元尺寸不一樣,為更好地拼接公共接邊區(qū)域的連接精度,在二者航帶落差區(qū)域按階梯式增加了連接影像,如圖4所示。
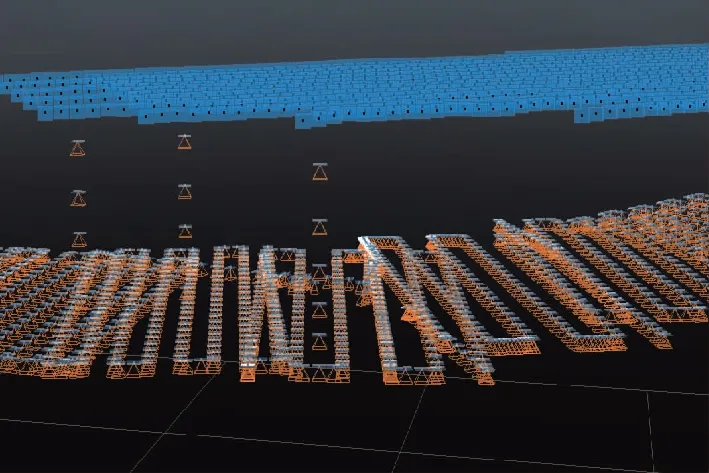
圖4 公共接邊影像分布圖
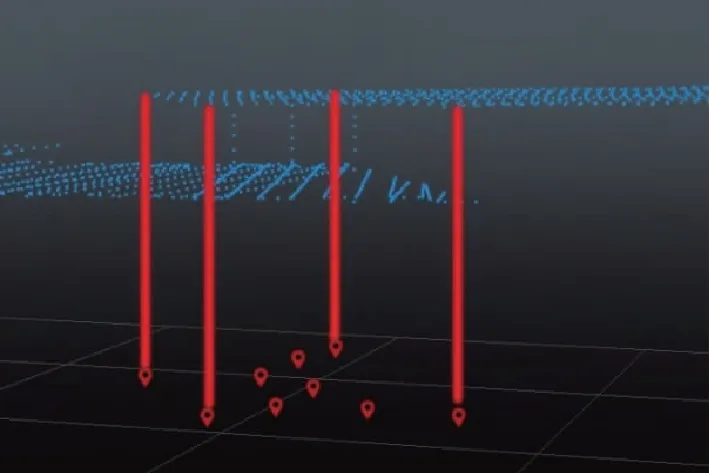
圖5 增加連接影像的布置圖
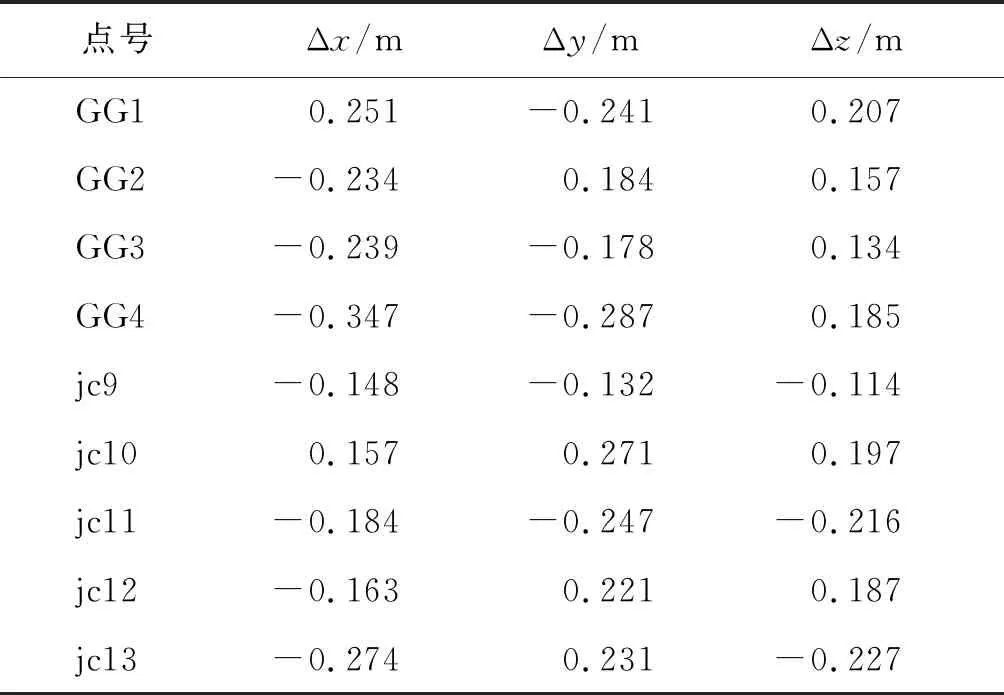
表2 增加航帶落差影像的公共接邊點(diǎn)誤差表
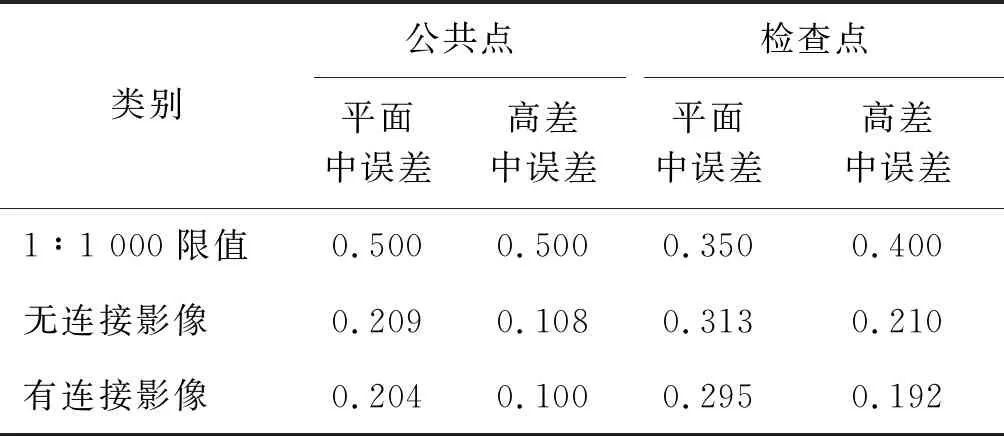
表3 公共接邊公共點(diǎn)檢查點(diǎn)中誤差分析表
通過(guò)分析航帶公共接邊的公共點(diǎn)和檢查點(diǎn)的中誤差,發(fā)現(xiàn)通過(guò)添加航帶之間的連接影像可以有效地降低檢查點(diǎn)的中誤差,進(jìn)一步提高航帶分區(qū)的特征匹配精度。
3 航帶分區(qū)連接影像分析
由于固定翼搭載的相機(jī)CMOS(complementary metal oxide semiconductor)尺寸為23.5 mm×15.6 mm,遠(yuǎn)大于大疆旋翼無(wú)人機(jī)相機(jī)CMOS尺寸13.2 mm×8.8 mm,因此,考慮到重疊度的問(wèn)題,取最小像元尺寸相機(jī)的CMOS進(jìn)行計(jì)算。
設(shè)CMOS1(a1×b1)的尺寸大于CMOS2(a2×b2)的尺寸,當(dāng)搭載CMOS1尺寸相機(jī)的無(wú)人機(jī)在上方,搭載CMOS2尺寸相機(jī)的無(wú)人機(jī)在下方時(shí),有
(1)
hL=H2
(2)
式中:hn為第n次CMOS2尺寸相機(jī)拍攝的高度;H1為搭載CMOS1尺寸相機(jī)的無(wú)人機(jī)航高;q為連接影像之間的重疊率;H2為搭載CMOS2尺寸相機(jī)的無(wú)人機(jī)航高。
當(dāng)搭載CMOS1尺寸相機(jī)的無(wú)人機(jī)在下方,搭載CMOS2尺寸相機(jī)的無(wú)人機(jī)在上方時(shí),有
(3)
hL=H1
(4)
式中:f1為為搭載CMOS1尺寸相機(jī)的焦距;f2為搭載CMOS2尺寸相機(jī)的焦距。
本文使用的是第一種情況,如表4所示。
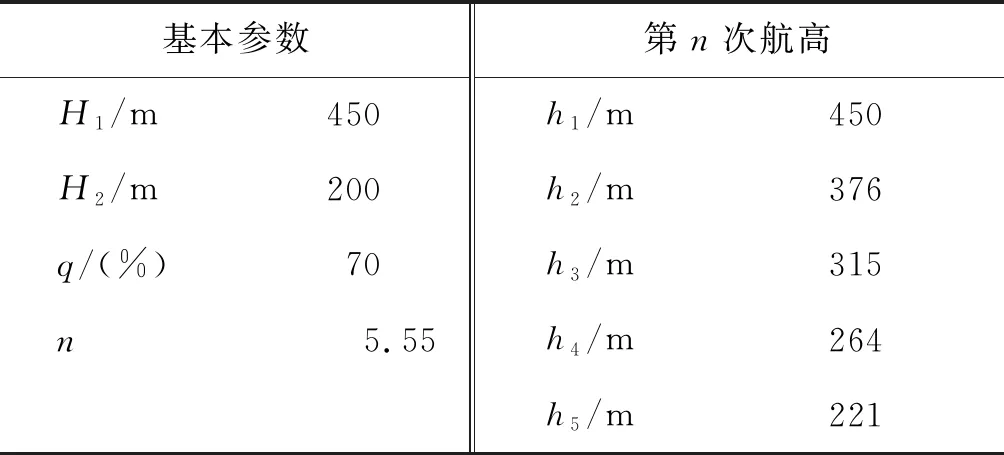
表4 高低航帶連接影像計(jì)算表
4 影像匹配
針對(duì)影像處理時(shí),本文所使用的方法為尺度不變特征變換算法[8](式(5))。

(5)
式中:m(x,y)和θ(x,y)分別為高斯金字塔影像(x,y)處梯度的大小和方向;L為每個(gè)關(guān)鍵點(diǎn)所在的尺度[9-10]。
拍攝的正射影像(包含旋翼和固定翼無(wú)人機(jī))由于相機(jī)CMOS尺寸不同,在公共連接區(qū)域可能會(huì)出現(xiàn)曝光點(diǎn)坐標(biāo)接近情況。因此,借助連接公共區(qū)域的4個(gè)公共點(diǎn)作為控制點(diǎn),消除曝光點(diǎn)接近基線(xiàn)過(guò)短的影像,處理后的影像作為結(jié)構(gòu)信息先進(jìn)行一次空中三角測(cè)量解算點(diǎn)云,建立局部框架模型。因?yàn)樵诔叨瓤臻g金字塔中,主要構(gòu)建尺度不變特征,將原始影像的主要結(jié)構(gòu)信息作為金字塔頂層,故匹配性較高[11-12]。加入傾斜影像在第二次空中三角測(cè)量解算點(diǎn)云時(shí),由于第一次空三框架的存在,在匹配的過(guò)程中由主體框架限定搜索區(qū)域減小,提高了第二次運(yùn)算的效率,并且根據(jù)第一次空三運(yùn)算的特征點(diǎn)快速匹配傾斜影像的特征點(diǎn)。
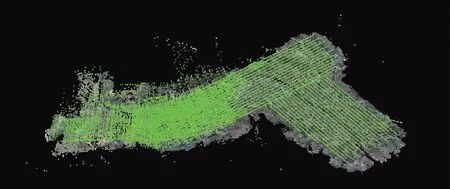
圖6 一次空三點(diǎn)云圖
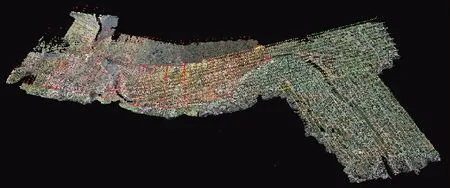
圖7 二次空三點(diǎn)云圖
5 模型重建與紋理映射
將大疆無(wú)人機(jī)和固定翼無(wú)人機(jī)的姿態(tài)角數(shù)據(jù)聯(lián)合形成外方位元素,通過(guò)空三解算和影像的自動(dòng)匹配技術(shù)對(duì)拍攝區(qū)域進(jìn)行場(chǎng)景重建生成TIN(triangulated iregular network)網(wǎng)格模型[13]。紋理映射主要是通過(guò)拍攝多視圖片的影像作為紋理圖,結(jié)合TIN模型的邊界輪廓進(jìn)行重映射生成紋理[14],如圖8所示。
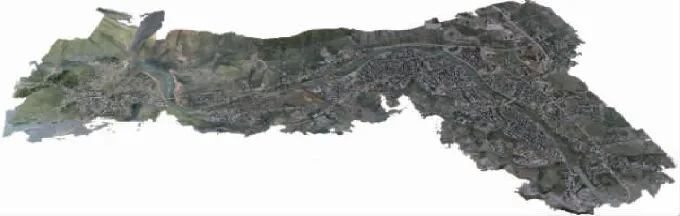
圖8 TIN模型圖
6 精度分析
產(chǎn)出TIN模型后,找出布設(shè)檢查點(diǎn)的對(duì)應(yīng)點(diǎn)坐標(biāo),之后與檢查點(diǎn)作誤差分析(表5),最后進(jìn)行中誤差分析(表6)。融合精度滿(mǎn)足1∶1 000的限差。
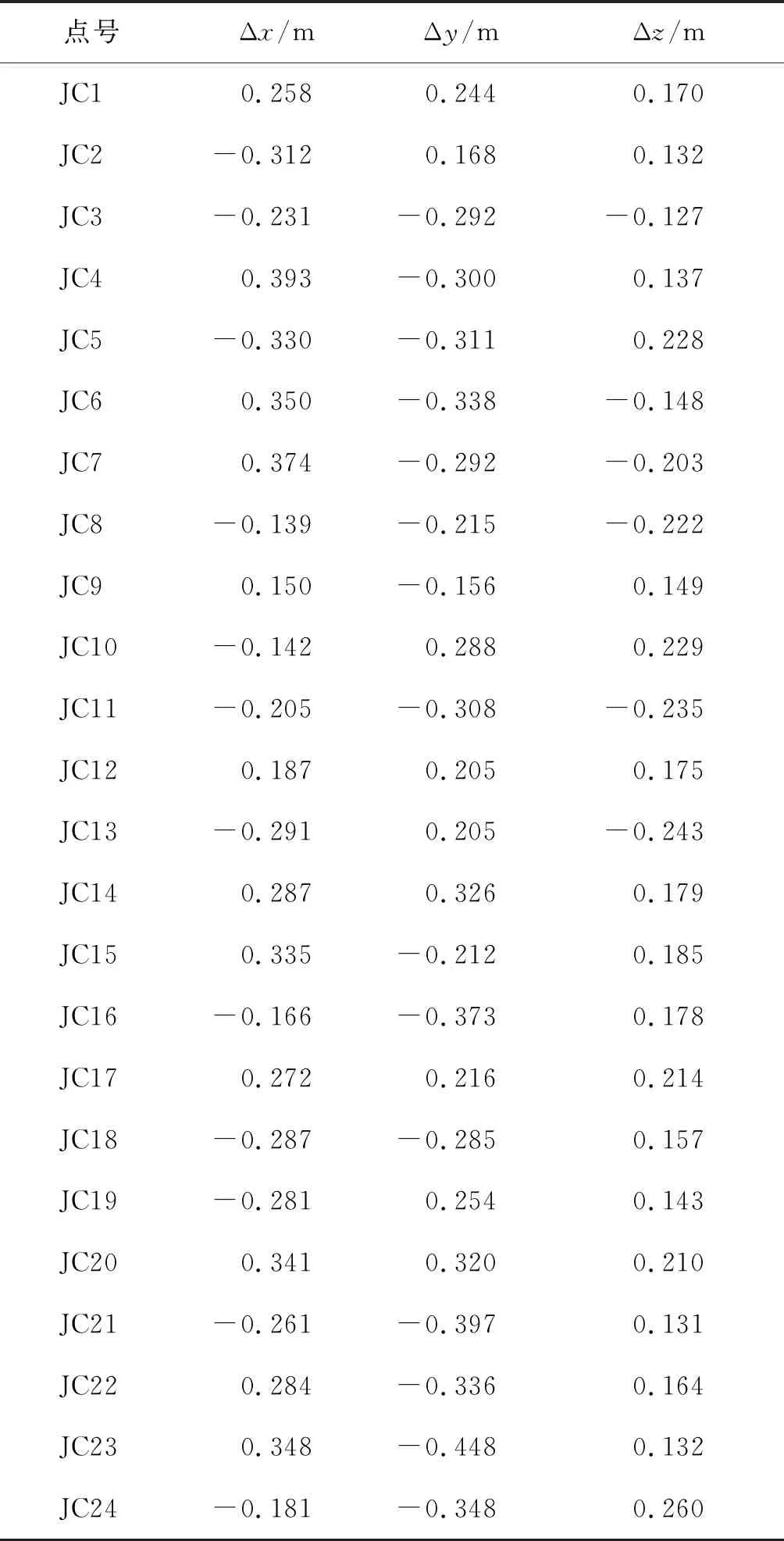
表5 誤差分析表
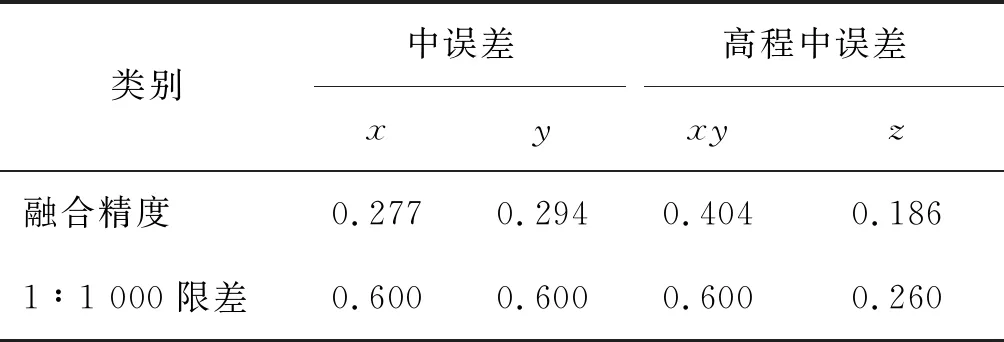
表6 中誤差分析表
7 結(jié)束語(yǔ)
本文通過(guò)對(duì)大高差重疊航帶融合情況進(jìn)行了討論,提出不同高差設(shè)置連接影像的辦法,針對(duì)空空結(jié)合、空地結(jié)合都具有很好的拓展性。
多旋翼與固定翼的結(jié)合解決了區(qū)域建模的難題。旋翼受制于飛行時(shí)長(zhǎng)的限制,但可以小區(qū)域高精度建模;固定翼雖解決了飛行時(shí)長(zhǎng)的限制但是針對(duì)細(xì)部建模往往受到飛控方式的限制。二者的有機(jī)結(jié)合能夠相互彌補(bǔ)。
通過(guò)二次空中三角測(cè)量解算,第一次空三聯(lián)合控制點(diǎn)構(gòu)建重建區(qū)域的大框架,第二次利用第一次空三的特征不變的原則高效率重建細(xì)部模型,有效解決了目前航測(cè)建模會(huì)出現(xiàn)的點(diǎn)云錯(cuò)層、影像丟失、拉花、球面的現(xiàn)象。
猜你喜歡
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
科學(xué)(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學(xué)輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
新疆財(cái)經(jīng)大學(xué)學(xué)報(bào)(2015年3期)2015-12-10 03:49:15