考慮不定拆卸程度的選擇性異步并行拆卸序列規劃
2021-05-19 06:48:32王振東杜百崗李益兵
中國機械工程 2021年9期
郭 鈞 王振東 杜百崗 李益兵
1.武漢理工大學機電工程學院,武漢,4300702.武漢理工大學湖北省數字制造重點實驗室,武漢,430070
0 引言
拆卸過程作為廢舊(end-of-life,EOL)產品再生過程中的關鍵步驟,其規劃問題逐漸受到了人們的廣泛關注。拆卸序列規劃(disassembly sequence planning,DSP)是指根據預定的評價指標,確定EOL產品中零部件的最佳拆卸順序。在工程實踐中,EOL產品拆卸過程主要是對高剩余價值或有害的零部件進行提取。選擇性并行拆卸具有拆卸步驟少、拆卸時間短、拆卸能耗低等優點,對提高EOL產品的再生效率具有重要意義。本文針對復雜EOL產品再生的拆卸過程,研究不定拆卸程度的選擇性異步并行拆卸序列規劃方法,從而達到提高拆卸收益及拆卸效率的目的。
近年來,選擇性并行拆卸受到了國內外學者的廣泛關注。SMITH等[1]利用模塊化理論將產品分組為模塊并通過遞歸規則進行并行拆卸。KIM等[2]建立了成本順序依賴選擇性并行拆卸序列整數規劃模型,以拆卸成本最小為優化目標,用分支定界算法進行求解。PISTOLESI等[3]建立了選擇性并行拆卸序列規劃模型并設計了多目標張量模因算法進行規劃求解。田永廷等[4]提出了以拆卸總時間最小為目標的基于遺傳算法的選擇性并行拆卸序列規劃方法。上述文獻考慮的并行拆卸通常為同步并行DSP,將并行任務分步驟進行,每一步的并行任務必須同時開始,而在實際拆卸過程中,在滿足約束關系的前提下拆卸任務可無需等待直接開始執行。為縮短同步等待時間,REN等[5]提出了異步并行拆卸的概念,建立了異步并行拆卸序列規劃模型,并利用遺傳算法進行優化求解,證明了異步并行拆卸較同步并行拆卸效率更高。鄧明星等[6]在異步并行拆卸的基礎上提出了考慮多目標件的異步并行拆卸序列規劃方法,以拆卸完工時間最小為優化目標,利用改進的遺傳算法進行求解,證明了該方法的可行性與有效性。然而現有的選擇性并行拆卸通常是以目標件為出發點逆向搜索出產品的必拆零件集合,從而將選擇性拆卸序列規劃問題轉化為定拆卸程度的局部完全拆卸序列規劃問題。該拆卸方式應用于EOL產品的再生過程中,忽略了必拆零件集合以外的非必拆零部件的再生收益。因此,本文在此基礎上提出將目標件逆向搜索出的必拆零件集合作為EOL產品的最少拆卸件集合,進一步考慮EOL產品所有零部件再生收益的不定拆卸程度的選擇性異步并行拆卸方法。
并行拆卸序列規劃問題復雜,隨著EOL產品零件數量增加,拆卸序列解空間呈指數增長,傳統的拆卸序列規劃方法已無法滿足復雜產品拆卸需求。于是許多學者利用智能算法來解決該問題。目前應用到DSP問題上的智能算法有遺傳算法[7]、蟻群算法[8]、人工魚群算法[9]、人工蜂群算法[10]、花朵授粉算法[11]等。生物地理學優化(biogeography-based optimization,BBO)算法是由SIMON[12]受到生物地理學理論的啟發而提出的,該算法借鑒生物地理學中的物種遷移模型來求解優化問題,具有算法結構簡單、局部開發能力強等諸多優勢,目前BBO算法在工程優化[13]、車間調度[14]等領域取得了明顯的效果,具有十分廣闊的應用前景。DSP問題是一個NP-hard問題[15],目前將BBO算法用于求解DSP問題還鮮有報道。
綜上所述,本文基于異步并行拆卸概念,提出了一種全面考慮廢舊產品所有零部件再生收益的不定拆卸程度的選擇性異步并行拆卸序列規劃方法。針對該問題通過目標件逆向搜索確定最小拆卸程度,以拆卸時間最小與利潤最大為優化目標,構建多目標異步并行拆卸序列規劃數學模型。結合DSP問題特點,將原適用于解決連續優化問題的BBO算法進行離散化,并采用基于隨機拓撲結構的遷移操作提高算法搜索能力,設計了多目標隨機拓撲結構生物地理學優化(multi-objective random topology biogeography-based optimization,MRTBBO)算法進行求解。最后通過實例驗證不定拆卸程度選擇性異步并行拆卸方法的優越性及MRTBBO算法求解該模型的有效性。
1 模型的構建
1.1 不定拆卸程度選擇性異步并行拆卸問題描述
EOL產品再生的拆卸過程目的是在盡可能少的時間內獲取EOL產品中盡可能多的價值。考慮到有害零部件的強制拆卸處理以及擁有高剩余價值的零部件的拆卸需求,需將這些零部件作為選擇性拆卸中的目標件。而傳統的選擇性拆卸多是指定程度的拆卸序列規劃問題,圖1中紅色圓代表目標件,黃色圓代表目標件逆向搜索出的優先拆卸件。圖1a所示為將其轉化為定拆卸程度的局部完全性拆卸。而不定拆卸程度的選擇性拆卸的拆卸程度在一個范圍之間,如圖1b所示,其中虛線圍住部分代表最小拆卸件集合,實線圍住部分為其最大拆卸件集合。

(a)定拆卸程度 (b)不定拆卸程度圖1 選擇性拆卸的拆卸范圍對比Fig.1 Comparison of disassembly range forselective disassembly
圖1示例零件的拆卸時間與收益見表1。在異步并行拆卸模式下,圖1示例的定拆卸程度的選擇性拆卸與不定拆卸程度的選擇性異步并行拆卸的解如圖2、圖3所示,圖中M1、M2表示EOL產品。在考慮EOL產品每個零部件的拆卸時間與拆卸收益的情況下,對比圖2、圖3a,不定拆卸程度選擇性異步并行拆卸能在相同的拆卸時間8.5 s下比定拆卸程度的選擇性異步并行拆卸多拆卸2、3號零件,從而獲得更多收益,或進一步延長拆卸時間至9 s(圖3b),執行更多的拆卸操作,獲取更大的收益。

表1 拆卸時間與收益

圖2 定拆卸程度的選擇性異步并行拆卸Fig.2 Selective asynchronous parallel disassemblywith a certain degree of disassembly
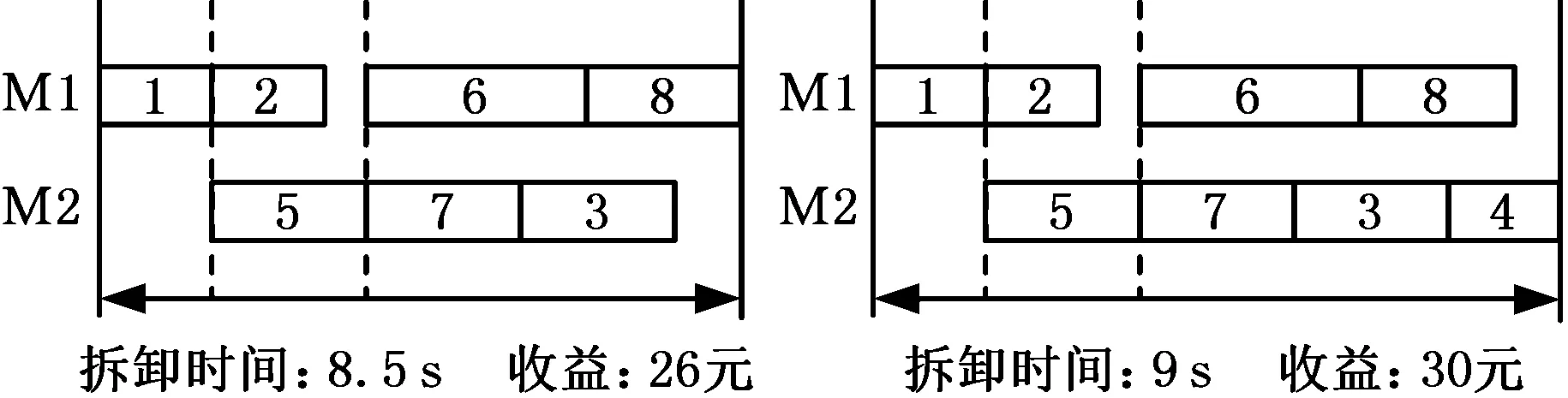
(a)拆卸時間8.5 s(b)延長拆卸時間至9 s圖3 不定拆卸程度選擇性異步并行拆卸Fig.3 Selective asynchronous parallel disassemblysolution set with indeterminate degree of disassembly
綜上可見,在EOL產品再生過程的拆卸中,有必要在考慮拆卸目標件的基礎上進一步考慮EOL產品的所有零部件拆卸收益,建立以拆卸時間最小、拆卸收益最大為目標的不定拆卸程度選擇性異步并行拆卸模型。
1.2 拆卸混合圖模型

圖4 拆卸混合圖示例Fig.4 Example of disassembling hybrid diagram
拆卸混合圖是用來描述產品零部件之間的連接關系以及約束關系的表達模型,能充分表達出產品的拓撲結構。本文采用拆卸混合圖來表達待拆卸產品的信息。如圖4所示,將拆卸混合圖定義為G={V,UE,DE,IE},其中,V為拆卸混合圖的最小拆卸單元的集合,UE為拆卸混合圖的無向邊集合,DE為有向實線邊集合,IE為有向虛線邊集合。V={v1,v2,…,vn},n為最小拆卸單元個數;UE={u1,u2,…,um},m為無向邊的總數,無向邊表示兩最小拆卸單元之間存在接觸關系;DE={d1,d2,…,dk},k為有向實線邊的總數,有向實線邊表示兩最小拆卸單元之間既存在接觸關系又存在拆卸優先關系;IE={i1,i2,…,ih},h為有向虛線邊的總數,有向虛線邊表示兩最小拆卸單元之間只存在拆卸優先關系。
為便于計算機對拆卸混合圖模型進行表達和優化分析,將拆卸混合圖做數字化處理。將拆卸混合圖轉化為接觸約束矩陣Mc和優先約束矩陣Mp:
則由Mc與Mp的定義可知,任意時刻拆卸單元i的可拆條件為
(1)
1.3 問題假設
為了簡化問題,做以下假設:①假設零部件基本拆卸時間與拆卸收益為定值,不受質量狀態影響,即本文不考慮不確定質量狀態所帶來的基本拆卸時間與收益的波動;②假設拆卸資源充足且不存在拆卸過程中的空間干涉問題。
1.4 模型相關參數及說明
模型相關參數定義見表2。
目標函數為
(2)
(3)
約束條件為
(4)
(5)
(6)
xi=1 ?i∈Cm
(7)
(8)

(9)
(10)
(11)
目標函數式(2)為拆卸過程總時間,即并行拆卸過程中最后一個零件的拆卸結束時間;目標函數式(3)為拆卸過程總收益,其中包含零部件的預期再生收益以及與并行數和總時間相關的拆卸成本;約束式(4)表示零件i的開始拆卸時間為

表2 符號定義
其直接優先零件集合拆卸結束時間與零件i執行單元M當前拆卸結束時間之間的最大值;約束式(5)表示零件i的直接優先零件集合的拆卸結束時間為其優先零件拆卸結束時間中的最大值;約束式(6)表示拆卸零件i的執行單元M的當前結束時間為拆卸其前一零件ei的結束時間;約束式(7)表示最小必拆零件集合中的零件必須拆卸;約束式(8)表示總的拆卸零件數量大于或等于最小必拆零件的數量;約束式(9)表示若零件i需拆卸,則其直接優先零件集合中的零件也需拆卸;約束式(10)表示零件i的拆卸結束時間需大于拆卸開始時間;約束式(11)用于計算拆卸序列的拆卸程度。
2 基于多目標隨機拓撲結構生物地理學求解算法
BBO算法通過模擬島嶼之間的物種遷徙從而達到生態平衡的遷移機制與棲息地自然災害的突變機制來求解優化問題。棲息地適應物種生存的程度用適應度指數(habitat suitability index,HSI)來衡量。高HSI值的棲息地擁有較高的遷出率與較低的遷入率,而低HSI值的棲息地擁有較低的遷出率與較高的遷入率。棲息地物種的遷入遷出機制使HSI值較低的棲息地可通過獲得HSI值高的棲息地提供的優秀物種變量(suitability index variables,SIV)改善自身。此外,BBO算法的突變機制使棲息地上的SIV發生突變,從而使得BBO算法具有一定的防止陷入局部最優的能力。
原始的BBO算法是用來解決連續優化問題的,本文針對問題模型將BBO算法離散化加以改進從而提出了MRTBBO算法,以解決本文所提的不定拆卸程度的選擇性異步并行拆卸問題。
2.1 待拆卸零件搜索算法
本文在目標驅動推理法[16]的啟發下提出一種待拆卸零件搜索算法。通過拆卸混合圖的約束關系,輸入目標件進行逆向遞歸搜索待拆卸零件集合。算法具體步驟如下:
(1)初始化搜索集合St1、被動件集合St2、待拆卸零件集合F為空,加載目標件集合S,加載接觸約束矩陣Mc、優先約束矩陣Mp。
(2)將S中所有拆卸零件放入搜索集合St1與待拆卸零件集合F。
(3)判斷搜索集合St1是否為空,為空則跳轉至步驟(5);若St1不為空則以搜索集合St1中的零件作為主動件(被約束節點),依據可拆條件式(1)逆向推理出搜索集合St1中所有零件的被動件(直接優先約束節點)并放入St2。
(4)判斷St2是否為空,為空則跳轉至步驟(5);否則將St2去重后添加到待拆卸零件集合F中,并用St2替換搜索集合St1使之成為新的搜索集合St1,返回步驟(3)。
(5)將待拆卸零件集合F去重后輸出。
2.2 棲息地編碼
有效的編碼方式可以減少算法中的不可行個體的生成,從而避免算法中對不可行個體的篩選與轉化。本文結合不定拆卸程度選擇性異步并行拆卸序列規劃的特點,采用三層鏈表結構的編碼方式:P={PRw,PRx,PRm},第一層PRw采用長度為n的1~n之間隨機不重復整數序列來表示零件的拆卸權重,即PRw={w1,w2,…,wn},wi(i=1,2,…,n)代表零件i的拆卸權重。第二層PRx由長度為n的隨機0-1二進制序列來代表是否拆卸,即PRx={x1,x2,…,xn},xi(i=1,2,…,n)為1表示零件i需拆卸,為0則表示不拆卸。第三層PRm由1~P之間的隨機可重復整數來表示執行該零件拆卸的執行單元序號,即PRm={M1,M2,…,Mn},Mi(i=1,2,…,n)代表零件i由拆卸執行單元Mi執行拆卸操作。P為并行拆卸的并行數。圖4示例的拆卸并行數為3的一段隨機初始化編碼見表3。

表3 棲息地初始化編碼示例
2.3 棲息地解碼
假定圖4所示拆卸示例的目標件為{8},配合表3所示初始化編碼,PRx中需拆卸的零件{3,7}與目標件{8}取并集為{3,7,8}。通過待拆卸件搜索算法獲取最終需拆卸零件集合Df={1,3,5,6,7,8}。將初始棲息地編碼的第二部分PRx序列進行調整,調整結果見表4,具體步驟如下:
(1)更新混合圖模型中的接觸約束矩陣Mc和優先約束矩陣Mp。在Mc與Mp中將最終拆卸零件集合Df以外的行與列剔除。
(2)結合Mc與Mp,依據可拆卸條件式(1)推斷出當前可拆卸零件集合Dk={k1,k2,…,km}。
(3)從Dk中選出拆卸權重w最大的零件ki,使其在執行單元Mki上進行拆卸。
(4)更新Mp與Mc,將零件號ki所在列與行的值置0,解除與其相關的約束。
(5)判斷最終所需拆卸零件集合Df中的零件是否都已拆卸,若未拆卸完則跳轉至步驟(2),否則算法結束,輸出最終拆卸序列結果。

表4 棲息地編碼調整
如表4所示,調整過后的編碼按上述算法解碼得出的最終拆卸序列結果為

上式表明3個并行的拆卸執行單元的拆卸任務序列。
2.4 棲息地遷移機制
遷移機制是BBO算法的主要機制,遷移操作中包括遷入與遷出,該過程依據個體的遷入率與遷出率來進行選擇并執行。遷入遷出率的確定方式不同也會導致算法性能的差異。
2.4.1計算遷移率
不同的遷移率模型對算法的優化性能產生重要影響,針對DSP問題的特點,本文采用正弦遷移模型來計算棲息地的遷入遷出概率,其遷入率λi與遷出率μi的計算公式如下:
(12)
(13)
其中,I為棲息地最大遷入率,E為棲息地最大遷出率,Hi為棲息地i的適應度指數,Hmax為所有棲息地中的最大適應度指數。在本文所提模型中,令I=E=1。
2.4.2遷移過程
確定棲息地的遷移概率后,需依據遷入遷出率來選擇遷入遷出棲息地并執行遷移策略。本文按遷入遷出率的大小采用輪盤賭的方式依次選擇被遷入棲息地Zi與遷出棲息地Zj。本文針對三層鏈表編碼形式分別對權重序列PRw、是否拆卸序列PRx、執行單元序列PRm采取不同的遷移策略。
如圖5所示,對于PRw序列,將零件總數n以內的正整數隨機劃分為兩個集合W1與W2,被遷入棲息地Zi中的PRw序列在W1集合中的元素所在位置保持不變,依次填入臨時棲息地Zk。然后將遷出棲息地Zj在W2集合的元素按照順序依次填入臨時棲息地Zk的空位,形成新的P′Rw序列。
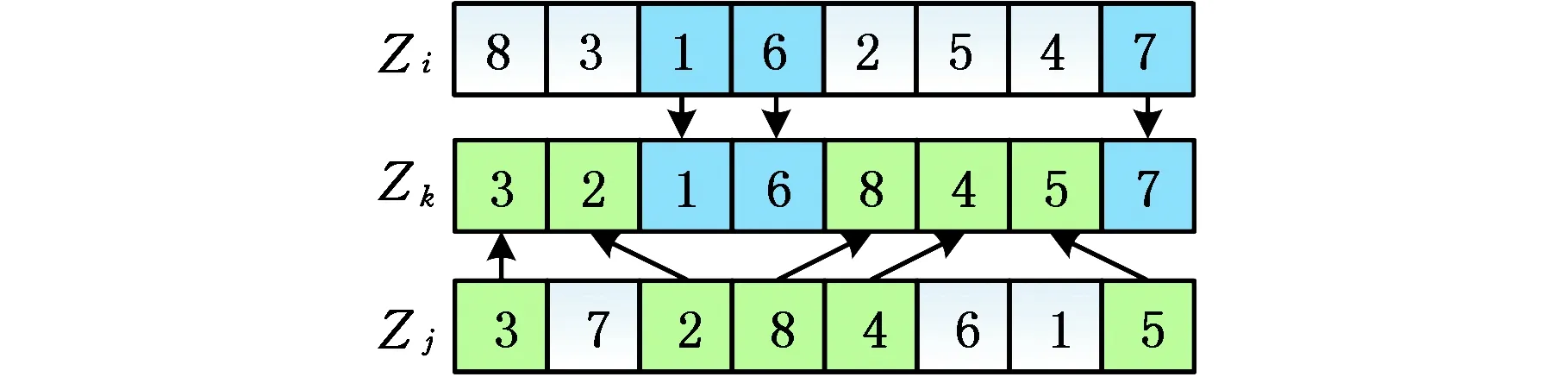
圖5 PRw序列的遷移操作Fig.5 PRw sequence migration operation
如圖6所示,對于PRx、PRm序列,首先生成一串長度為n的隨機0-1數組作為參照,其中元素為1指示棲息地Zi中對應位置的元素填入臨時棲息地Zk的對應位置,元素為0指示棲息地Zj中對應位置的元素填入臨時棲息地Zk的對應位置,從而形成新的P′Rx、P′Rm序列。

(a)PRx序列遷移(b)PRm序列遷移圖6 PRx、PRm序列的遷移操作Fig.6 PRx、PRm sequence migration operation
PRw序列、PRx序列、PRm序列的遷移操作分別執行完畢后進行整合,{P′Rw,P′Rx,P′Rm}成為新棲息地,替換被遷入棲息地Zi,完成一次遷移操作。
2.4.3基于隨機拓撲結構的遷移
BBO算法雖然具有多種優良性能,但是BBO算法的全局搜索性能還有所欠缺,容易陷入局部最優。為了提高BBO算法的搜索性能,本文采用基于隨機拓撲結構的遷移算子。
BBO的遷移算子默認是全局拓撲結構,即每次遷移操作中的遷出解從全體棲息地中依據遷出率選擇進行遷移,而隨機拓撲結構為每個棲息地都隨機生成一個大小不定的鄰域范圍,為該棲息地選擇遷出棲息地時遷出解均從中按遷出率進行選擇。此外,用平均鄰域大小參數K來設置種群中所有棲息地的平均鄰域水平。設置參數Nmax為外部檔案集質量無改善的迭代次數上限,當算法連續Nmax次迭代尋優后外部檔案集質量無改善時,將種群的隨機拓撲結構進行重置。這種機制有助于算法跳出局部最優。
2.5 棲息地突變機制
自然界中發生重大災害會導致棲息地的組成和結構發生急劇變化,BBO算法將該情形模擬成棲息地突變機制,棲息地的突變機制也是BBO算法至關重要的環節,可以用來提高種群的多樣性。
2.5.1計算突變率
棲息地的突變率與棲息地的物種數量概率成反比,物種數量較多或較少時的物種數量概率都相對較低,而物種數量為中等水平的概率比較高。結合拆卸序列規劃問題,本文提出了一種基于適應度指標的突變機制,即在適應度較低和較高的棲息地中的突變概率相對較低,而適應度接近于平均適應度時的突變概率相對較高。本文的突變概率計算公式為
(14)

2.5.2突變過程
結合三層鏈表的編碼方式,拆卸權重序列PRw與是否拆卸序列PRx及執行單元序列PRm分別采取不同的突變方式,如圖7、圖8所示,PRw序列的突變方式是從PRw序列上隨機選擇一個位置上的元素插入其他位置;PRx序列的突變方式是從PRx序列上隨機選擇兩個位置的元素進行二進制取反;PRm序列的突變方式是從PRm序列上隨機選擇兩個位置的元素隨機改變成其他執行單元序號。

圖7 PRw序列的突變方式Fig.7 Mutation of PRw sequence

(a)PRx序列突變 (b)PRm序列突變圖8 PRx、PRm序列的突變方式Fig.8 Mutation of PRx,PRm sequence
2.6 算法流程
綜上所述,給出的算法流程圖見圖9。

圖9 算法流程圖Fig.9 Algorithm flow chart
3 實例應用
為了驗證本文所提模型方法的優越性和所提算法求解該模型問題的有效性,利用MATLAB平臺編寫了MRTBBO算法,算法的運行環境為2.6GHz CPU,12G RAM,Windows 10 64位操作系統的個人計算機。
3.1 試驗案例
本文分別采用兩種不同規模大小的試驗案例來驗證所提模型的優越性。案例一是零件數為23的機械臂[17];案例二是零件數為52的二級圓柱圓錐減速器,其三維模型爆炸圖見圖10,拆卸混合圖見圖11,零件信息表見表5。

圖10 案例二:二級圓柱圓錐齒輪減速器Fig.10 Case 2: two-stage cylindrical bevelgear reducer

圖11 案例二:二級圓柱圓錐齒輪減速器拆卸混合圖Fig.11 Case 2: disassembly hybrid diagram oftwo-stage cylindrical bevel gear reducer

表5 案例二:二級圓柱圓錐齒輪減速器零件信息
3.2 試驗結果分析
本文通過正交試驗確定MRTBBO算法分別作用在兩個試驗案例上的最優參數。
3.2.1案例一
算法參數設置:種群大小Psize=250,迭代次數Gmax=800,棲息地最大突變率Pmax=0.2,平均鄰域大小K=6,非支配解集無改善迭代次數上限Nmax=10。針對本文所提不定拆卸程度選擇性異步并行拆卸問題,設目標件Cd={1,6,12},并行度為3,計算結果Pareto解空間分布如圖12所示,其中各個解的詳細拆卸序列見表6。作為對比設置同樣的目標件、并行度,傳統定拆卸程度下的選擇性異步并行拆卸優化結果見表7。不定拆卸程度模式非支配解集表6中案例一的拆卸甘特圖見圖13a,定拆卸程度模式最優解的拆卸甘特圖見圖13b。

圖12 案例一:Pareto解集空間分布Fig.12 Case1: spatial distribution of Paretosolution set
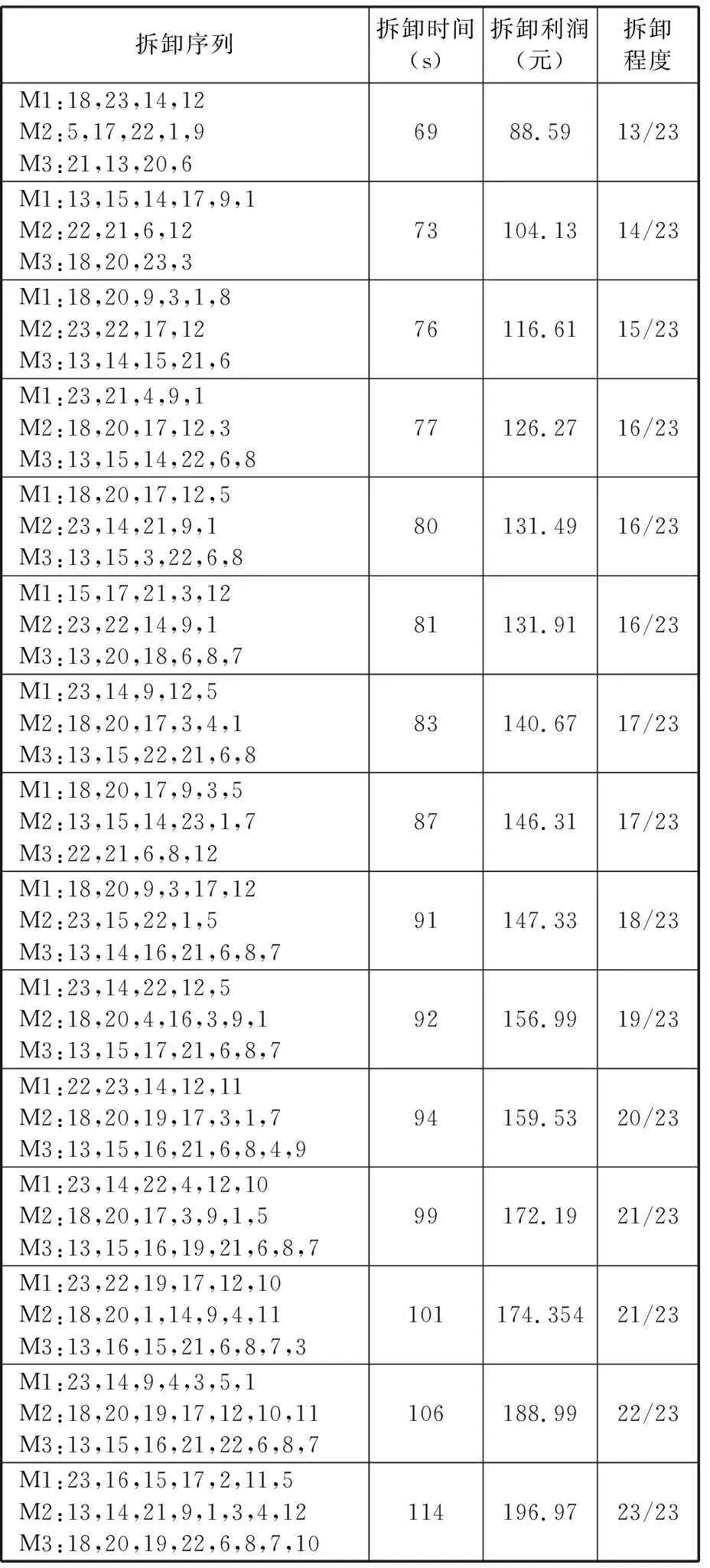
表6 案例一:不定拆卸程度選擇性異步并行拆卸非支配解集

表7 案例一:定拆卸程度選擇性異步并行拆卸最優解

(a)不定拆卸程度選擇性異步并行拆卸非支配解集示例

(b)定拆卸程度選擇性異步并行拆卸最優解示例圖13 案例一:Cd={1,6,12},并行度為3時最優解甘特圖Fig.13 Case 1:Gantt chart of optimal solution whenCd={1,6,12}, degrees of parallelism is 3
3.2.2案例二
算法參數設置:種群大小Psize=200,迭代次數Gmax=1000,棲息地最大突變率Pmax=0.1,平均鄰域大小K=12, 非支配解集無改善迭代次數上限Nmax=20。針對本文所提不定拆卸程度選擇性異步并行拆卸問題,設目標件Cd={1,3,7,14,29},并行度為3,計算結果Pareto解集空間分布如圖14所示,其中詳細拆卸序列信息見表8。作為對比,設置同樣的目標件、并行度,傳統定拆卸程度下的選擇性異步并行拆卸優化結果見表9。不定拆卸程度模式非支配解集表8中第一個解方案的拆卸甘特圖見圖15a,定拆卸程度模式最優解的拆卸甘特圖見圖15b。

圖14 案例二:Pareto解集空間分布Fig.14 Case 2: spatial distribution of Pareto solution set
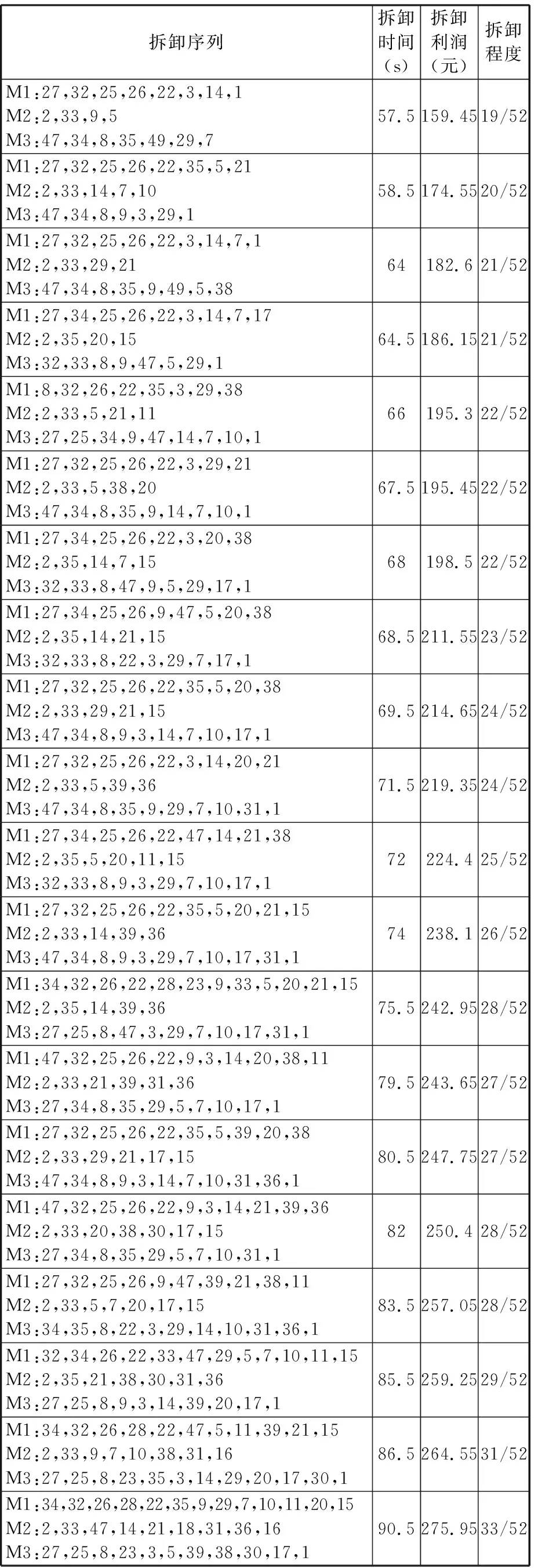
表8 案例二:不定拆卸程度選擇性異步并行拆卸非支配解集

表9 案例二:定拆卸程度選擇性異步并行拆卸最優解

(a)不定拆卸程度選擇性異步并行拆卸非支配解集示例

(b)定拆卸程度選擇性異步并行拆卸最優解示例圖15 案例二:Cd={1,3,7,14,29},并行度為3時最優解甘特圖Fig.15 Case 2:Gantt chart of optimal solution whenCd={1,3,7,14,29}, degrees of parallelism is 3
3.3 實例對比結果分析
觀察圖13與圖15可以發現,本文所提不定拆卸程度選擇性異步并行拆卸能在相同的拆卸時間內充分利用由拆卸優先約束造成的等待時間,進一步拆卸了多個非最小拆卸集合中的零件,從而在相同的拆卸時間內獲取了更多的利潤。
觀察兩個試驗案例的不定程度選擇性異步并行拆卸解集展示表6與表8,與定程度選擇性異步并行拆卸解集展示表7與表9,可以發現不定拆卸程度選擇性異步并行拆卸為決策者提供了多種不同拆卸程度的決策方案,在實際應用中有較好的實際意義。
4 算法對比
為證明本文所提MRTBBO算法解決不定拆卸程度的選擇性異步并行拆卸問題的優越性,將其與經典多目標優化算法:快速非支配排序遺傳算法(NSGA-Ⅱ)、多目標粒子群優化算法(MOPSO)、多目標生物地理學優化算法(MOBBO)[18]、基于模糊Pareto支配的生物地理學優化算法(FPDCBBO)[19]、多目標擾動生物地理學優化算法(MDBBO)[20]進行對比試驗。
采用多目標算法的綜合度量指標反世代距離(inverted generational distance,IGD)、多樣性度量指標間距(spacing,S)和準確性度量指標成功率(success ratio,SR)作為算法性能評價指標,IGD值越小代表算法的收斂性越好,分布越均勻,S值越小代表算法的多樣性越好,SR值越大說明算法性能越好[21]。
所有算法種群規模均設為200,迭代1000次。各算法的參數設定如下:MRTBBO的最大變異率為0.1,平均鄰域大小為20,非劣解無改善代數上限為30;NSGA-Ⅱ的交叉概率為0.9,變異率為0.1;MOPSO的最大慣性權重為1.2,最小慣性權重為0.6,個體因子為0.8,社會因子為0.8。MOBBO、FPDCBBO、MDBBO的最大變異率均為0.1。將各算法獨立運行20次,取20次結果的平均值作為最終的測試結果,各性能指標結果見表10,案例一與案例二中一次運算的各算法求得的Pareto解集空間分布圖分別見圖16、圖17。
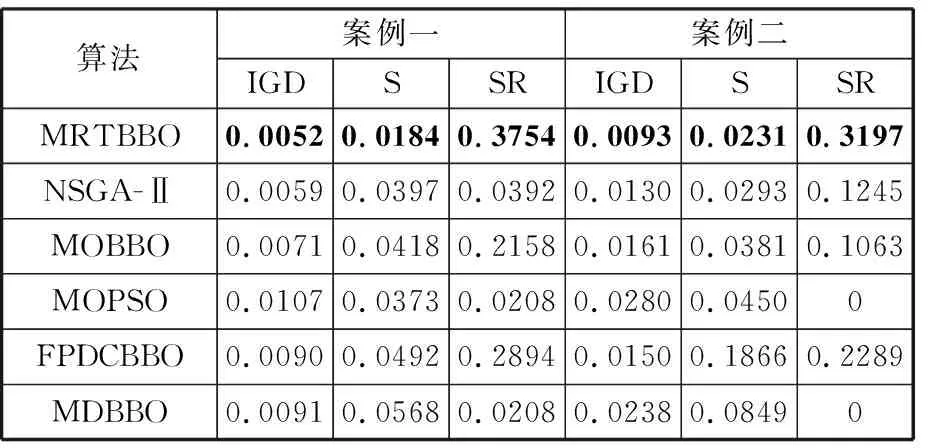
表10 各算法性能指標測試結果

圖16 案例一:各算法Pareto解集空間分布Fig.16 Case 1:spatial distribution of Pareto solutionset of each algorithm

圖17 案例二:各算法Pareto解集空間分布Fig.17 Case 2:spatial distribution of Pareto solutionset of each algorithm
觀察表10對比結果與解空間分布圖16及圖17,MRTBBO算法性能指標在兩個案例中均優于另5種算法,表明在解決不定程度的選擇性異步并行拆卸問題上,MRTBBO可以在相同的測試條件下更接近真實Pareto前沿且解的多樣性更好,算法性能更好。依據本文改進的生物地理學算法MRTBBO與未做改進的多目標生物地理學算法MOBBO的數據進行對比,結果表明本文采取的基于隨機拓撲結構的遷移策略可以有效提高多目標BBO算法的搜索性能。
5 結論
為了提高廢舊產品再生過程中的再生收益,本文研究了考慮不定拆卸程度的選擇性拆卸問題,建立了以拆卸總時間最短和拆卸總收益最大為優化目標的考慮不定拆卸程度的選擇性異步并行拆卸模型;針對該模型特點,提出了一種改進的生物地理學優化算法。設計了一種三層鏈表的編碼解碼方式來避免不可行拆卸序列的產生,提出了基于隨機拓撲結構的遷移策略以提高算法的搜索性能;通過兩種不同規模的試驗案例驗證了不定拆卸程度的選擇性異步并行拆卸序列規劃模型,能在考慮最小待拆件集合之外,充分利用由拆卸優先約束造成的等待時間,進而拆卸更多的零部件,并為決策者提供多個拆卸方案。最后通過對比算法試驗驗證了本文所提算法改進機制的合理性,以及解決不定拆卸程度的選擇性異步并行拆卸問題的有效性。未來將進一步深入研究考慮廢舊產品質量狀態的拆卸序列規劃模型與解決方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
少先隊活動(2021年2期)2021-03-29 05:40:48
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高二數學)(2019年6期)2019-06-24 03:37:50
中國公路(2017年7期)2017-07-24 13:56:38