仿樹袋熊爬桿機(jī)器人的結(jié)構(gòu)設(shè)計(jì)與仿真分析
2021-05-21 01:09:28林琦峰陳勇宋雪萍
大連交通大學(xué)學(xué)報(bào) 2021年2期
林琦峰,陳勇,宋雪萍
(大連交通大學(xué) 機(jī)械工程學(xué)院,遼寧 大連 116028)*
隨著經(jīng)濟(jì)的飛速增長,各大城市矗立起眾多的電線桿、路燈桿和斜拉橋等高層桿狀建筑. 這些高層桿狀建筑的高度通常是3~30 m,有的甚至高達(dá)百米,金屬桿件的表面通常采用油漆噴涂,由于常年的日光暴曬和風(fēng)吹雨打,加快金屬桿件的氧化腐蝕,縮短使用壽命,需要定期進(jìn)行清潔維護(hù). 傳統(tǒng)的高層桿狀建筑清洗維護(hù)方式:①人工攜帶清洗維護(hù)裝置爬桿作業(yè),存在很大的危險(xiǎn)性;②使用大型長臂作業(yè)車將工人與清洗維護(hù)裝置送到制定位置進(jìn)行人工作業(yè),操作復(fù)雜,成本較高,使用不便. 長期以來,如何高效、低成本、綠色環(huán)保地清洗和維護(hù)高層桿狀建筑,一直是一個(gè)難題. 爬桿機(jī)器人可以替代人工進(jìn)行清洗和維護(hù)高層桿狀建筑,減少危險(xiǎn)性,降低操作難度和維護(hù)成本.
現(xiàn)有的爬桿機(jī)器人[1-6]可以分為三種:輪式爬桿機(jī)器人[7-8]、爪式爬桿機(jī)器人[9-11]和吸附式爬桿機(jī)器人[12-13]. 輪式爬桿機(jī)器人具有重量輕、安全、響應(yīng)快速等特點(diǎn),適用于攀登圓柱形的階梯式桿件,但是越障能力有限[14]. 爪式爬桿機(jī)器人的腿部末端采用鉤爪結(jié)構(gòu),可以牢固地攀附于物體表面,適用于平面及曲面結(jié)構(gòu),但是抓取方式比較復(fù)雜[15]. 吸附式爬桿機(jī)器人采用磁吸附式轉(zhuǎn)輪結(jié)構(gòu),可吸附在任意曲面,三角形的萬向輪布置方式,可以實(shí)現(xiàn)在曲面任意方向的運(yùn)動(dòng)攀爬,但是負(fù)載能力比較差[16].
為了解決現(xiàn)有技術(shù)存在的上述問題,根據(jù)樹袋熊的攀爬特性,利用仿生學(xué)原理,設(shè)計(jì)一種爬桿機(jī)器人,用于清洗和維護(hù)電線桿、路燈桿和斜拉橋等高層桿狀建筑.本文設(shè)計(jì)的仿樹袋熊爬桿機(jī)器人,攜帶清洗與維護(hù)裝置,代替人工對(duì)高層桿狀建筑進(jìn)行清洗與維護(hù),減少了爬桿作業(yè)的危險(xiǎn)性,降低了操作難度和維護(hù)成本. 該機(jī)器人采用上下兩層機(jī)械手的抱緊結(jié)構(gòu),采用齒輪齒條的升降結(jié)構(gòu)代替以往的連桿結(jié)構(gòu),與現(xiàn)有的爬桿機(jī)器人相比,彌補(bǔ)了輪式爬桿機(jī)器人的越障能力缺陷,突破了爪式爬桿機(jī)器人的抓取方式瓶頸,解決了吸附式爬桿機(jī)器人的負(fù)載能力薄弱. 本文設(shè)計(jì)的仿樹袋熊爬桿機(jī)器人,優(yōu)勢(shì)在于滿足攀爬要求的同時(shí),能夠?qū)Σ煌睆降母邔訔U狀建筑可以自適應(yīng)調(diào)節(jié)夾持力,具有較好的攀爬運(yùn)動(dòng)靈活性.
1 樹袋熊的攀爬特性
在自然界中,樹袋熊經(jīng)過億萬年的自然進(jìn)化,在攀爬步態(tài)、適應(yīng)環(huán)境和運(yùn)動(dòng)功能等方面具有精巧的合理性,可以滿足不同的步態(tài)需求,具有特殊的攀爬能力,能夠適應(yīng)不同直徑的樹木.
1.1 樹袋熊的攀爬步態(tài)
成年雄性樹袋熊的攀爬步態(tài),如圖1所示. 攀爬速度為1.16 m/s,在攀爬過程中,0 s時(shí),樹袋熊的四肢抱緊樹木,軀體處于收縮狀態(tài);0.11 s時(shí),樹袋熊逐漸伸展軀體、前肢準(zhǔn)備向上抱緊樹木、后肢逐漸展開;0.22 s時(shí),樹袋熊軀體伸展達(dá)到最大,前肢抱緊上方樹木,后肢完全展開;0.33s時(shí),樹袋熊逐漸收縮軀干,前肢抱緊樹木,后肢逐漸收縮;0.44 s時(shí),樹袋熊軀干完全收縮,前肢抱緊樹木,后肢進(jìn)一步收縮;0.55 s時(shí),樹袋熊軀干完全收縮,前肢抱緊樹木,后肢完全收縮,完成一個(gè)步態(tài)周期.
在攀爬過程中,樹袋熊軀體的收縮與伸展,配合四肢有規(guī)律的運(yùn)動(dòng),樹袋熊在后肢發(fā)力時(shí),軀體后部短暫離開樹木,為后肢活動(dòng)發(fā)力提供足夠的空間,樹袋熊后肢完成發(fā)力后,軀體緊貼樹木,減輕前肢的負(fù)重.
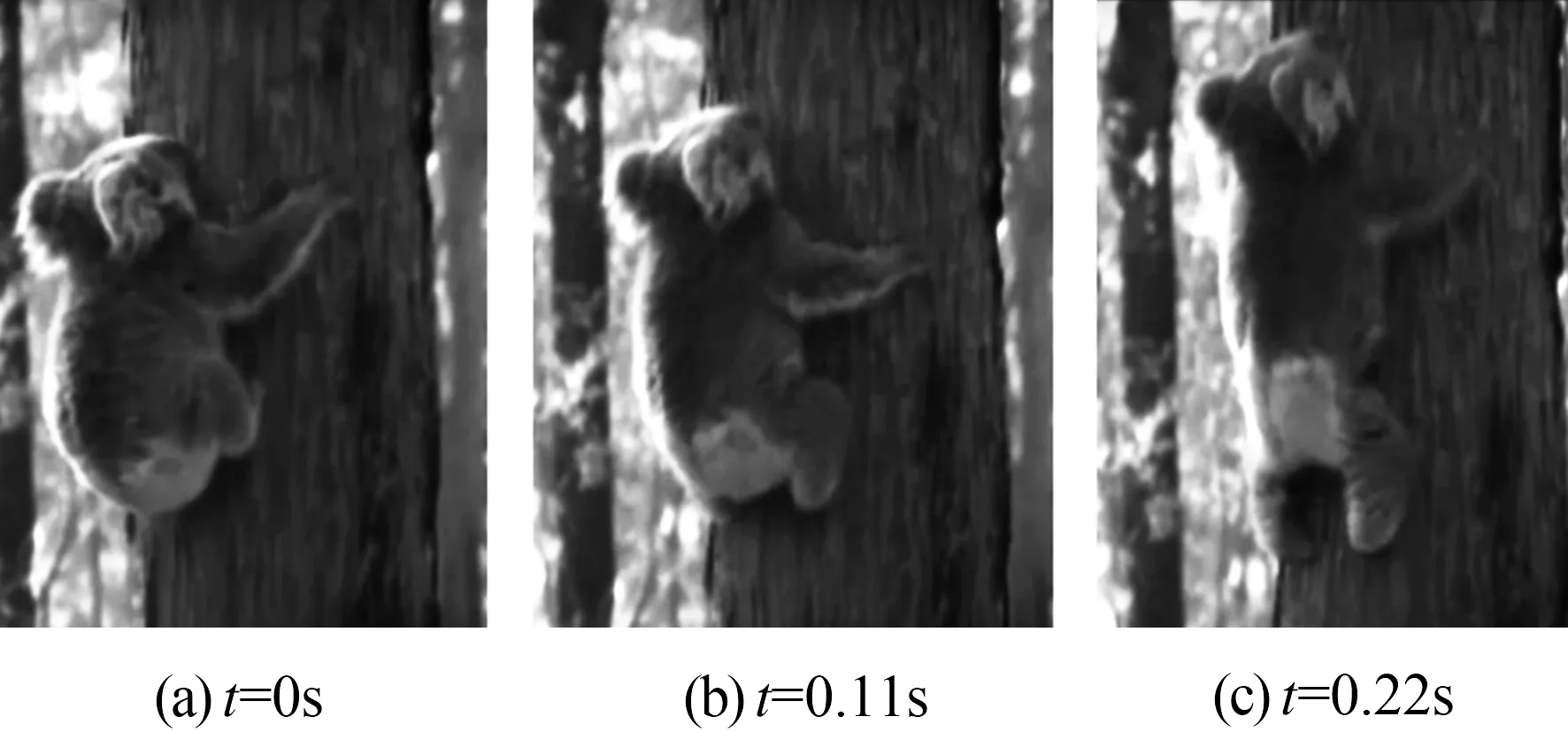
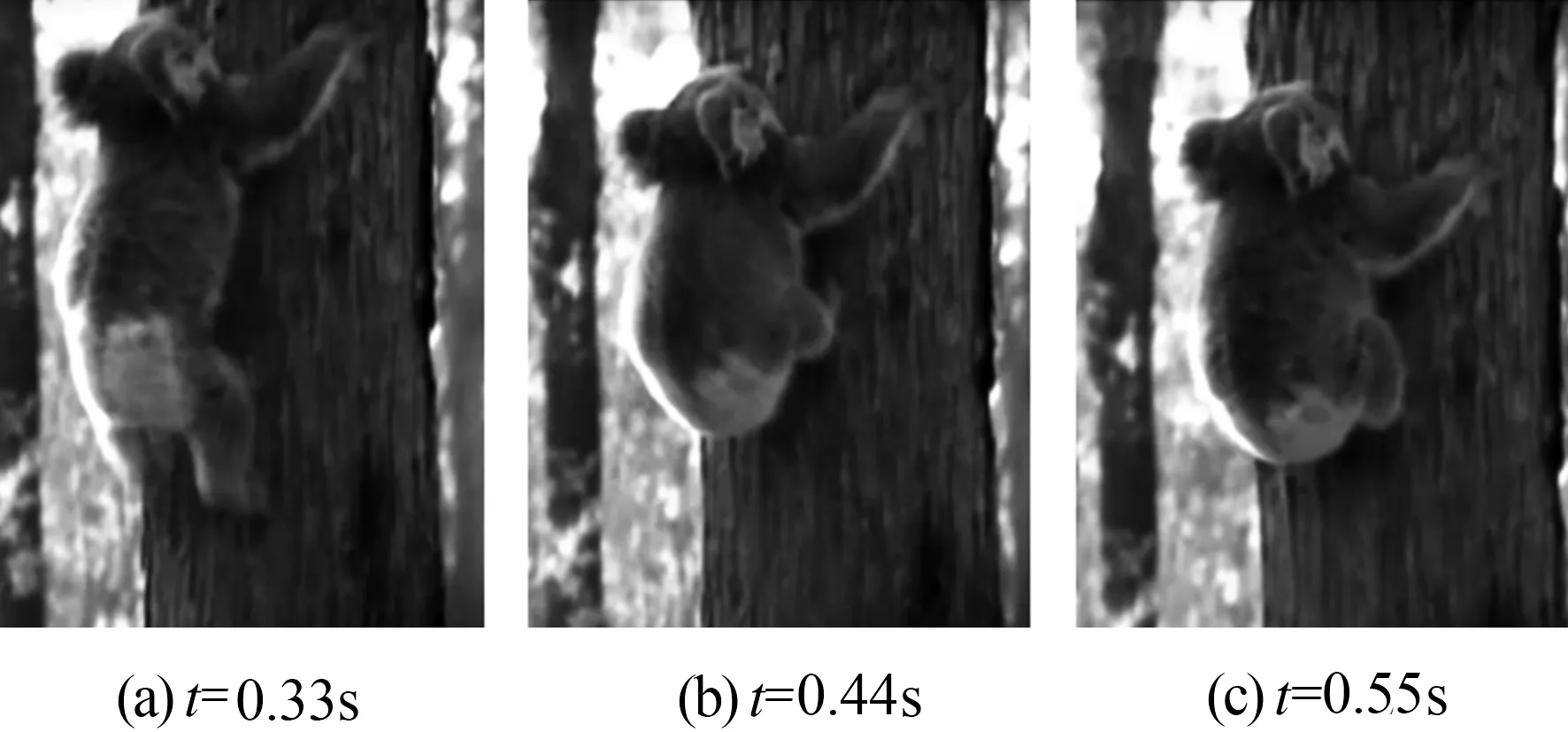
圖1 樹袋熊的攀爬步態(tài)周期圖
1.2 樹袋熊的關(guān)節(jié)角度
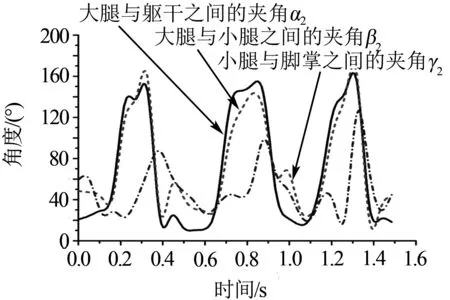
樹袋熊的關(guān)節(jié)角度如圖2所示,α1是大臂與軀干之間的肩關(guān)節(jié)夾角,β1是大臂與小臂之間的肘關(guān)節(jié)夾角,γ1是小臂與手掌之間的腕關(guān)節(jié)夾角,α2是大腿與軀干之間的髖關(guān)節(jié)夾角,β2是大腿與小腿之間的膝關(guān)節(jié)夾角,γ2是小腿與腳掌之間的踝關(guān)節(jié)夾角,圓點(diǎn)表示關(guān)節(jié),直線表示肢體. 測(cè)量樹袋熊攀爬過程的關(guān)節(jié)角度,使用Origin軟件繪制曲線圖,如圖3.
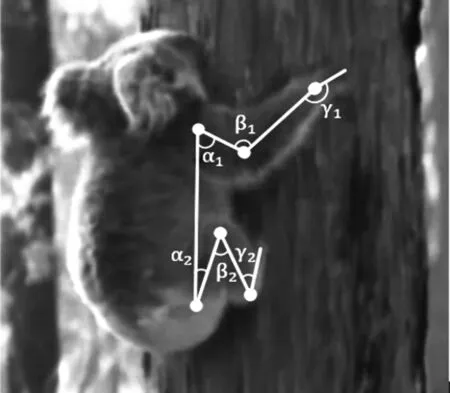
圖2 樹袋熊的關(guān)節(jié)角度示意圖
樹袋熊前肢的關(guān)節(jié)角度如圖3(a)所示,曲線出現(xiàn)了三次波峰與波谷,說明運(yùn)動(dòng)了三個(gè)步態(tài)周期. 0~0.15 s,α1逐漸減小,此時(shí)樹袋熊軀干在向上運(yùn)動(dòng),前肢未運(yùn)動(dòng);0.15~0.24 s,α1急劇增大,達(dá)到最大值135°,此時(shí)樹袋熊前肢瞬間向上伸展;0.24~0.47 s,α1緩慢減小,此時(shí)樹袋熊前肢運(yùn)動(dòng)幅度較小;0.47~0.55 s,α1急劇減小,此時(shí)樹袋熊軀干在收縮,軀體靠近前肢大臂,完成一個(gè)攀爬步態(tài)周期.β1與γ1變化較小,手掌和小臂跟隨大臂進(jìn)行擺動(dòng).
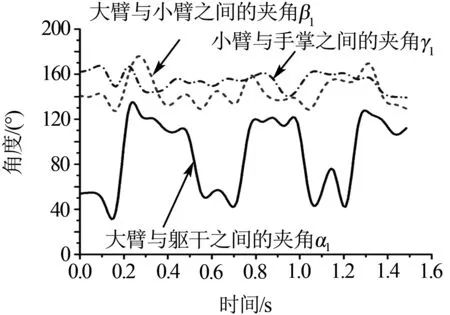
(a) 前肢
(b) 后肢
樹袋熊后肢的關(guān)節(jié)角度如圖3(b)所示,曲線出現(xiàn)了三次波峰與波谷,說明運(yùn)動(dòng)了三個(gè)步態(tài)周期. 0~0.1s,α2緩慢增大,此時(shí)樹袋熊軀干在向上運(yùn)動(dòng),后肢未運(yùn)動(dòng);0.1~0.3s,α2急劇增大,達(dá)到最大值150°,此時(shí)樹袋熊后肢瞬間展開;0.3~0.4 s,α2急劇減小,達(dá)到最小值12°,此時(shí)樹袋熊后肢瞬間收縮;0.4~0.55 s,α2進(jìn)行小范圍變化,此時(shí)樹袋熊調(diào)整身體,準(zhǔn)備下一次攀爬,完成一個(gè)攀爬步態(tài)周期.α2、β2和γ2的變化趨勢(shì)相似,β2和γ2的變化滯后于α2,樹袋熊的髖關(guān)節(jié)首先轉(zhuǎn)動(dòng),然后膝關(guān)節(jié)轉(zhuǎn)動(dòng),最后踝關(guān)節(jié)轉(zhuǎn)動(dòng). 比較圖3(a)、(b)可以表明樹袋熊在后肢展開的時(shí)候,前肢也展開,后肢收縮時(shí),前肢也保持收縮狀態(tài).
1.3 樹袋熊的攀爬機(jī)理
通過分析樹袋熊的攀爬步態(tài)和關(guān)節(jié)角度,獲得樹袋熊的攀爬機(jī)理:
在攀爬過程中,樹袋熊至少有兩條腿與樹木接觸,保證軀體的平衡穩(wěn)定;樹袋熊的肩關(guān)節(jié)是主動(dòng)關(guān)節(jié),肩關(guān)節(jié)的角度變化空間87.4°,進(jìn)行大范圍的轉(zhuǎn)動(dòng),為樹袋熊的前肢提供爬升動(dòng)力,樹袋熊的肘關(guān)節(jié)和腕關(guān)節(jié)是隨動(dòng)關(guān)節(jié),肘關(guān)節(jié)的角度變化空間48.4°,腕關(guān)節(jié)的角度變化空間27.2°,進(jìn)行小范圍的轉(zhuǎn)動(dòng),用來保持樹袋熊軀體的平衡穩(wěn)定;樹袋熊髖關(guān)節(jié)的角度變化空間143.9°,膝關(guān)節(jié)的角度變化空間136.1°,踝關(guān)節(jié)的角度變化空間103.2°,樹袋熊的后肢可以進(jìn)行大幅度的折疊與伸展,為樹袋熊的軀體提供爬升動(dòng)力,樹袋熊的后肢折疊時(shí),髖關(guān)節(jié)角度達(dá)到最小值10.3°,膝關(guān)節(jié)角度達(dá)到最小值25.4°,踝關(guān)節(jié)角度達(dá)到最小值20.9°,樹袋熊的后肢伸展時(shí),髖關(guān)節(jié)角度達(dá)到最大值150°,膝關(guān)節(jié)角度達(dá)到最大值165°,踝關(guān)節(jié)角度達(dá)到最大值90°.
2 爬桿機(jī)器人的結(jié)構(gòu)設(shè)計(jì)
根據(jù)樹袋熊的攀爬特性,利用仿生學(xué)原理,進(jìn)行爬桿機(jī)器人的結(jié)構(gòu)設(shè)計(jì). 參考樹袋熊的前肢與后肢, 爬桿機(jī)器人分成上層抱緊結(jié)構(gòu)與下層抱緊
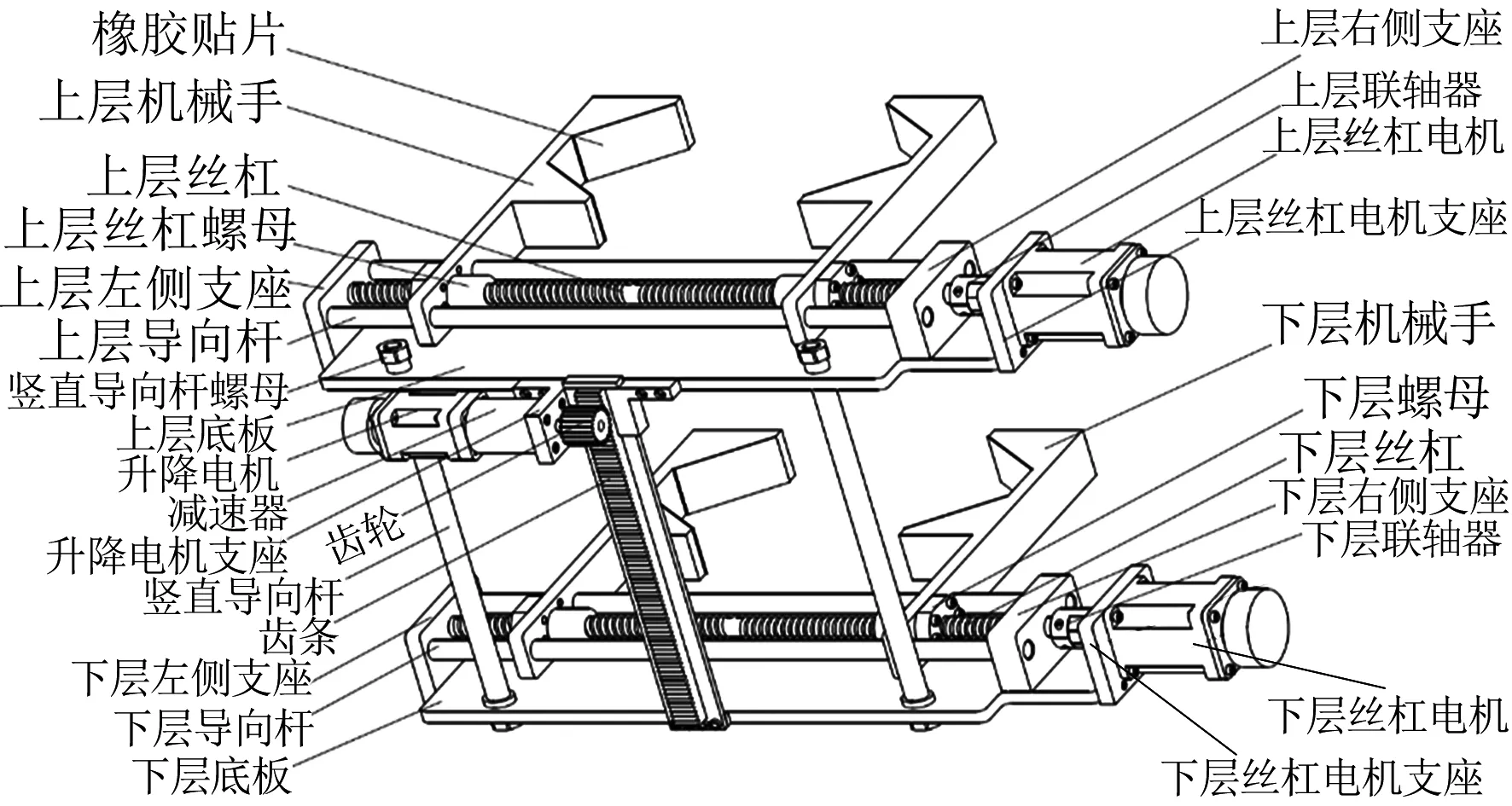
圖4 爬桿機(jī)器人的結(jié)構(gòu)示意圖
結(jié)構(gòu),參考樹袋熊后肢的折疊與伸展,采用齒輪齒條結(jié)構(gòu)為爬桿機(jī)器人的收縮與伸展提供動(dòng)力,實(shí)現(xiàn)爬桿機(jī)器人的升降,爬桿機(jī)器人的結(jié)構(gòu)示意圖如圖4所示.
3 爬桿機(jī)器人的仿真分析
3.1 仿真運(yùn)動(dòng)過程
利用三維建模軟件Creo,建立爬桿機(jī)器人的三維模型,如圖5所示.
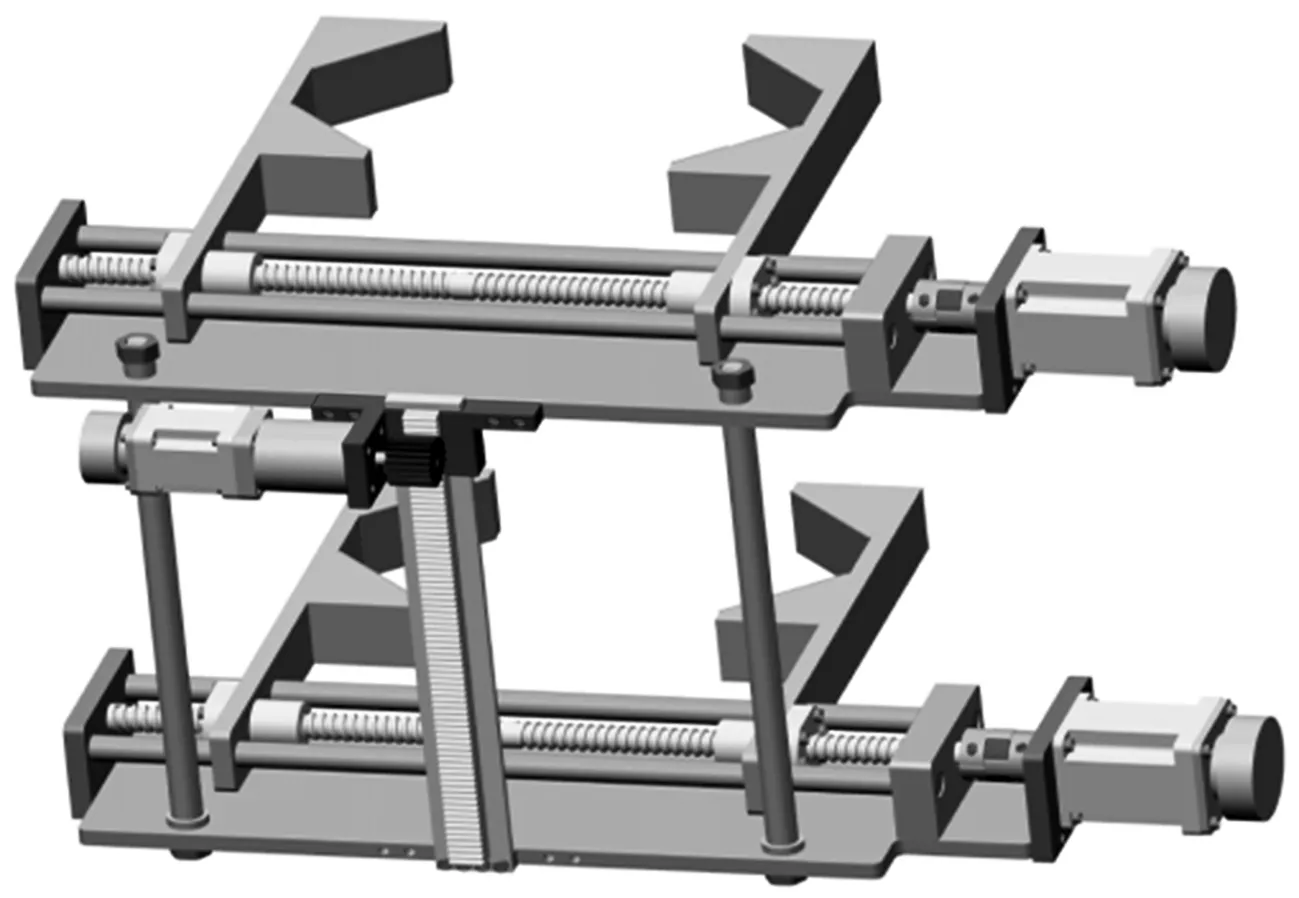
圖5 爬桿機(jī)器人的三維模型
將爬桿機(jī)器人的三維模型導(dǎo)入動(dòng)力學(xué)仿真軟件ADAMS,根據(jù)爬桿機(jī)器人的運(yùn)動(dòng)特性,設(shè)置各個(gè)構(gòu)件的物理特性和約束關(guān)系,添加驅(qū)動(dòng)元件,設(shè)置驅(qū)動(dòng)函數(shù)完成仿真運(yùn)動(dòng).
桿狀圓柱體的直徑150 mm、長度2 000 mm,在動(dòng)力學(xué)仿真軟件ADAMS中,爬桿機(jī)器人的約束關(guān)系如表1所示,設(shè)置動(dòng)力學(xué)仿真的邊界條件.
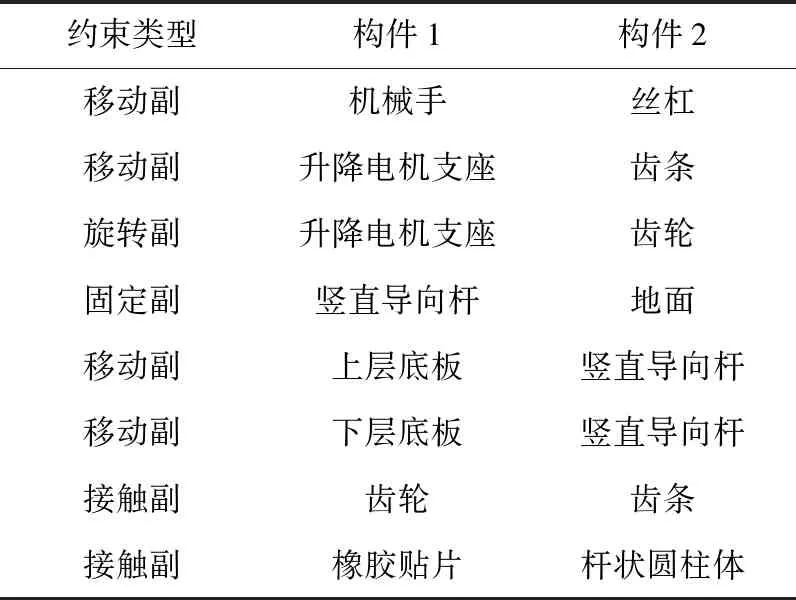
表1 爬桿機(jī)器人的約束關(guān)系
根據(jù)爬桿機(jī)器人的運(yùn)動(dòng)特性,在運(yùn)動(dòng)副上添加驅(qū)動(dòng)元件,使用STEP函數(shù)設(shè)置相應(yīng)的驅(qū)動(dòng)函數(shù):
齒輪旋轉(zhuǎn)的驅(qū)動(dòng)函數(shù)設(shè)置為STEP(time, 2, 0 d, 4, 600 d)+STEP(time, 7, 0 d, 9, -600 d);
上層左側(cè)機(jī)械手平移的驅(qū)動(dòng)函數(shù)設(shè)置為STEP(time, 0, 0, 2, -20)+STEP(time, 6, 0, 7, 10);
上層右側(cè)機(jī)械手平移的驅(qū)動(dòng)函數(shù)設(shè)置為STEP(time, 0, 0, 2, 20)+STEP(time, 6, 0, 7, -10);
下層左側(cè)機(jī)械手平移的驅(qū)動(dòng)函數(shù)設(shè)置為STEP(time, 4, 0, 6, -20);
下層右側(cè)機(jī)械手平移的驅(qū)動(dòng)函數(shù)設(shè)置為STEP(time, 4, 0, 6, 20).
爬桿機(jī)器人的總體質(zhì)量15 kg(未安裝清洗與維護(hù)裝置),仿真時(shí)間9 s,步數(shù)180,一個(gè)步態(tài)周期的仿真運(yùn)動(dòng)過程如圖6所示.
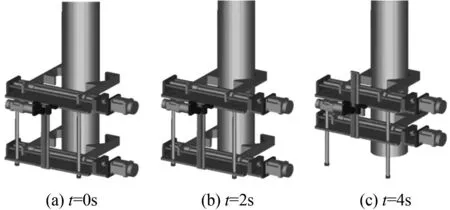
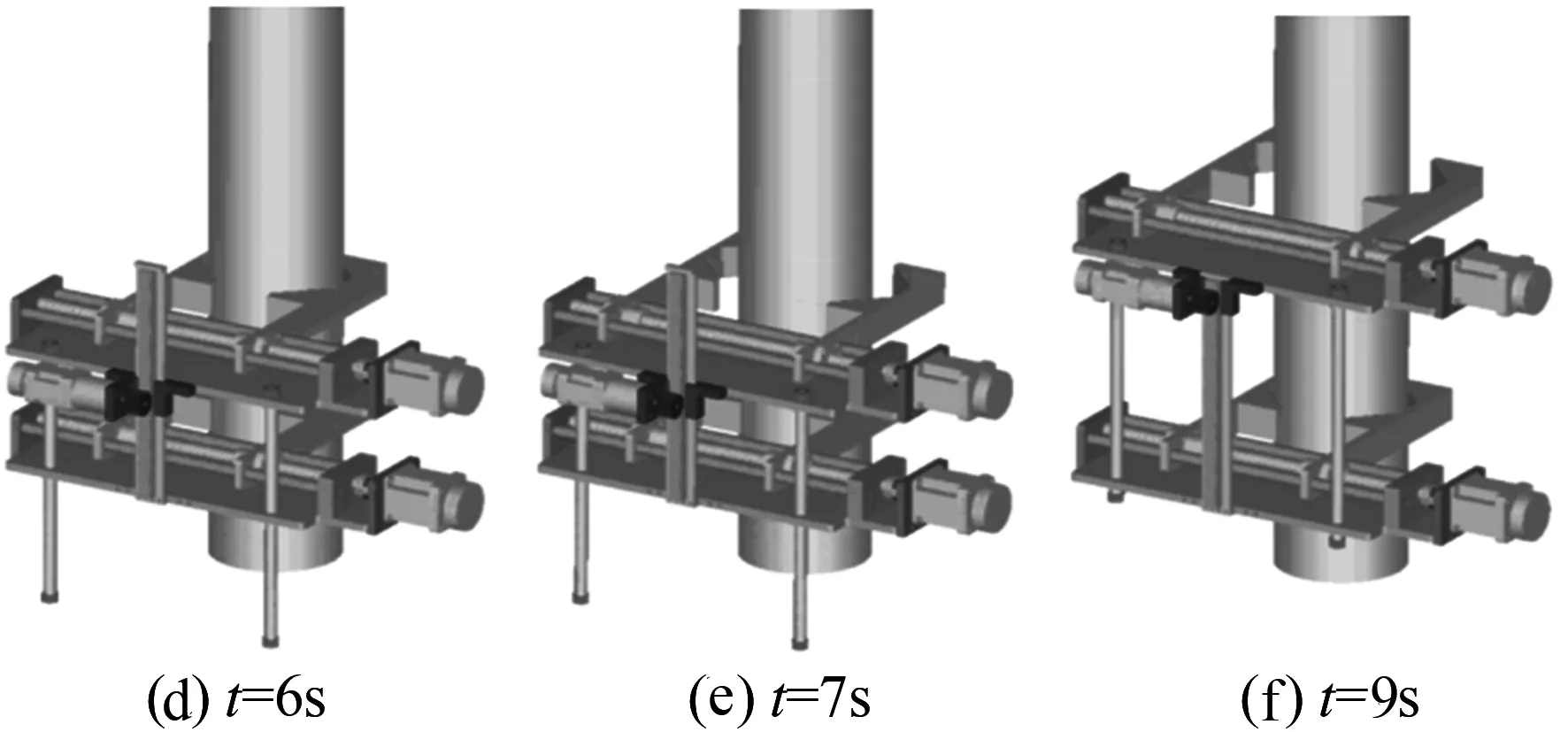
圖6 爬桿機(jī)器人的仿真運(yùn)動(dòng)過程
爬桿機(jī)器人沿著桿狀建筑向上攀爬的工作原理和運(yùn)動(dòng)過程:
(1)如圖6(a),將爬桿機(jī)器人放置在地面,上層機(jī)械手和下層機(jī)械手都處于張開狀態(tài),環(huán)抱在需要清洗或維護(hù)的桿狀建筑周圍;
(2)如圖6(b),啟動(dòng)上層絲杠電機(jī)進(jìn)行正轉(zhuǎn),帶動(dòng)上層絲杠旋轉(zhuǎn),由于上層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的上層機(jī)械手向中間運(yùn)動(dòng),上層機(jī)械手夾緊桿狀建筑后,停止上層絲杠電機(jī);
(3)如圖6(c),啟動(dòng)升降電機(jī)進(jìn)行正轉(zhuǎn),帶動(dòng)齒輪旋轉(zhuǎn),齒輪的嚙合帶動(dòng)齒條向上運(yùn)動(dòng),由于齒條的下端與下層底板固定,從而帶動(dòng)下層底板沿著豎直導(dǎo)向桿向上運(yùn)動(dòng),爬桿機(jī)器人移動(dòng)到指定距離,停止升降電機(jī);
(4)如圖6(d),啟動(dòng)下層絲杠電機(jī)進(jìn)行正轉(zhuǎn),帶動(dòng)下層絲杠旋轉(zhuǎn),由于下層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的下層機(jī)械手向中間運(yùn)動(dòng),下層機(jī)械手夾緊桿狀建筑后,停止下層絲杠電機(jī);
(5)如圖6(e),啟動(dòng)上層絲杠電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)上層絲杠旋轉(zhuǎn),驅(qū)動(dòng)左右兩側(cè)的上層機(jī)械手向左右兩側(cè)運(yùn)動(dòng),上層機(jī)械手松開桿狀建筑后,停止上層絲杠電機(jī);
(6)如圖6(f),啟動(dòng)升降電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)齒輪旋轉(zhuǎn),由于下層機(jī)械手夾緊桿狀建筑,導(dǎo)致下層底板處于固定位置,齒條位置固定,齒輪向上運(yùn)動(dòng),由于齒輪連接在升降電機(jī)上,升降電機(jī)通過支座固定在上層底板,從而帶動(dòng)上層底板沿著豎直導(dǎo)向桿向上運(yùn)動(dòng),爬桿機(jī)器人移動(dòng)到指定距離,停止升降電機(jī). 如此循環(huán)運(yùn)動(dòng),爬桿機(jī)器人可以沿著桿狀建筑向上攀爬到需要清洗或維護(hù)的位置.
爬桿機(jī)器人沿著桿狀建筑向下攀爬的工作原理和運(yùn)動(dòng)過程:
(1)完成清洗或維護(hù)的任務(wù)以后,爬桿機(jī)器人處于桿狀建筑的頂端,上層機(jī)械手和下層機(jī)械手都夾緊桿狀建筑. 啟動(dòng)下層絲杠電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)下層絲杠旋轉(zhuǎn),由于下層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的下層機(jī)械手向左右兩側(cè)運(yùn)動(dòng),下層機(jī)械手松開桿狀建筑后,停止下層絲杠電機(jī);
(2)啟動(dòng)升降電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)齒輪旋轉(zhuǎn),齒輪的嚙合帶動(dòng)齒條向下運(yùn)動(dòng),由于齒條的下端固定在下層底板,從而帶動(dòng)下層底板沿著豎直導(dǎo)向桿向下運(yùn)動(dòng),爬桿機(jī)器人移動(dòng)到指定距離,停止升降電機(jī);
(3)啟動(dòng)下層絲杠電機(jī)進(jìn)行正轉(zhuǎn),帶動(dòng)下層絲杠旋轉(zhuǎn),由于下層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的下層機(jī)械手向中間運(yùn)動(dòng),下層機(jī)械手夾緊桿狀建筑后,停止下層絲杠電機(jī);
(4)啟動(dòng)上層絲杠電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)上層絲杠旋轉(zhuǎn),由于上層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的上層機(jī)械手向左右兩側(cè)運(yùn)動(dòng),上層機(jī)械手松開桿狀建筑后,停止上層絲杠電機(jī);
(5)啟動(dòng)升降電機(jī)進(jìn)行反轉(zhuǎn),帶動(dòng)齒輪旋轉(zhuǎn),由于下層機(jī)械手夾緊桿狀建筑,導(dǎo)致下層底板處于固定位置,齒條的嚙合帶動(dòng)齒輪向下運(yùn)動(dòng),齒輪連接在升降電機(jī)支座,升降電機(jī)支座固定在上層底板,從而帶動(dòng)上層底板沿著豎直導(dǎo)向桿向下運(yùn)動(dòng),爬桿機(jī)器人移動(dòng)到指定距離,停止升降電機(jī);
(6)啟動(dòng)上層絲杠電機(jī)進(jìn)行正轉(zhuǎn),帶動(dòng)上層絲杠旋轉(zhuǎn),由于上層絲杠兩側(cè)螺紋的旋向相反,驅(qū)動(dòng)左右兩側(cè)的上層機(jī)械手向中間運(yùn)動(dòng),上層機(jī)械手夾緊桿狀建筑,停止上層絲杠電機(jī). 如此循環(huán)運(yùn)動(dòng),爬桿機(jī)器人可以沿著桿狀建筑向下攀爬到地面;
3.2 仿真結(jié)果
仿真結(jié)束后,通過ADAMS軟件的后處理獲得仿真結(jié)果曲線.
在一個(gè)步態(tài)周期內(nèi),爬桿機(jī)器人的下層底板在豎直方向的位移如圖7所示. 0 s時(shí),位移曲線保持水平,表明下層底板沒有開始運(yùn)動(dòng);2 s時(shí),爬桿機(jī)器人的下層底板開始在豎直方向移動(dòng);4 s時(shí),爬桿機(jī)器人的下層底板提升到最頂端,移動(dòng)距離150 mm;4 s后,位移曲線保持水平狀態(tài),表明下層底板保持不動(dòng).
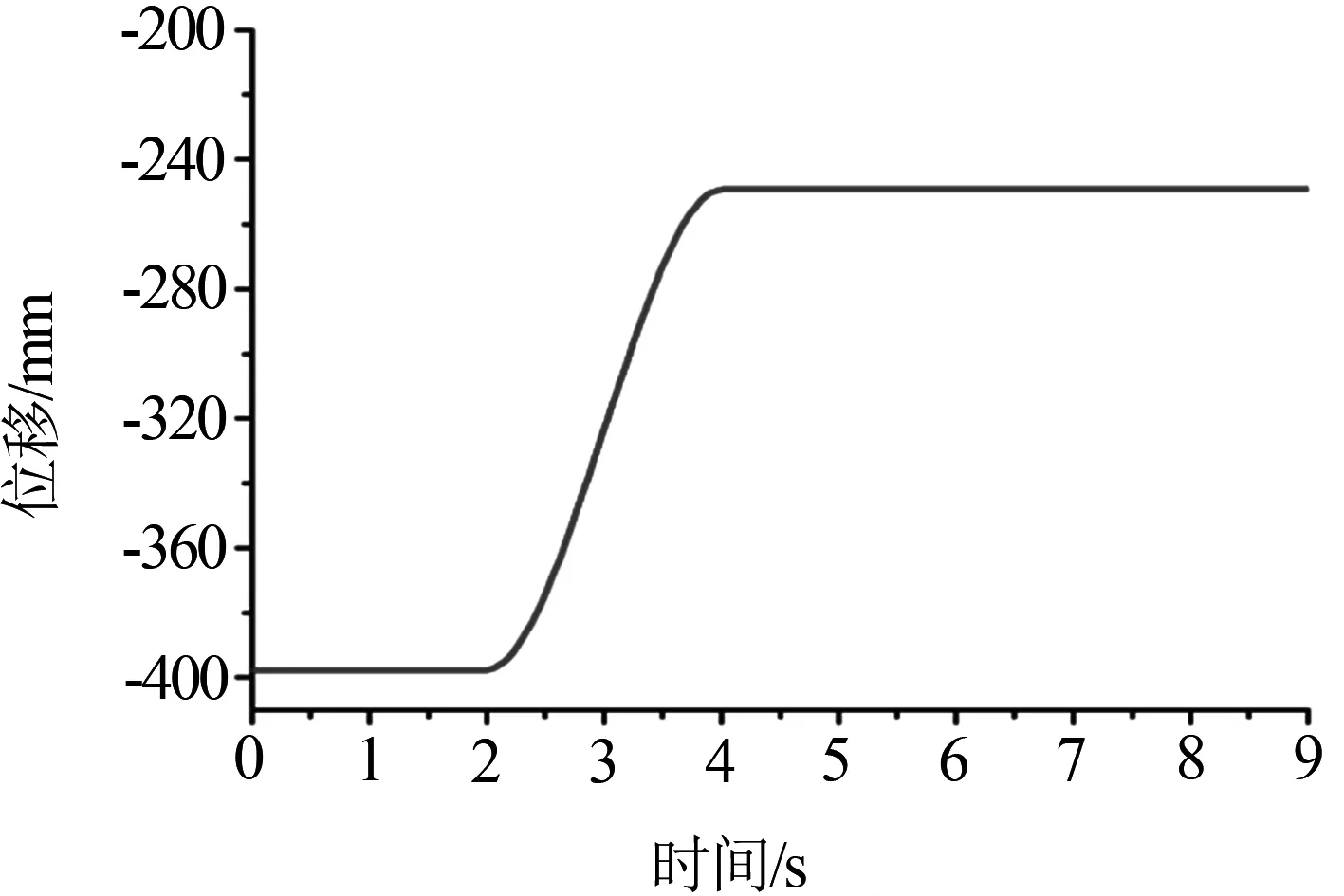
圖7 下層底板在豎直方向的位移
在一個(gè)步態(tài)周期內(nèi),爬桿機(jī)器人的下層底板在豎直方向的速度如圖8所示. 0 s時(shí),速度曲線保持為零,表明下層底板沒有開始運(yùn)動(dòng);2 s時(shí),速度開始逐漸變大;3 s時(shí),速度達(dá)到最大值122 mm/s;3 s后,速度開始逐漸減小;4 s時(shí),速度為零. 正常情況下,4 s后下層底板停止運(yùn)動(dòng),速度應(yīng)該為零,但是速度曲線并未為零,而是在5.2 s后才逐漸歸零,這說明,在下層底板停止運(yùn)動(dòng)后,下層機(jī)械手的移動(dòng)會(huì)對(duì)下層底板產(chǎn)生振動(dòng),導(dǎo)致速度不為零,同時(shí)由于爬桿機(jī)器人提升階段齒輪與齒條的接觸力產(chǎn)生振蕩,導(dǎo)致速度發(fā)生波動(dòng).
圖8 下層底板在豎直方向的速度
在一個(gè)步態(tài)周期內(nèi),爬桿機(jī)器人的上層底板在豎直方向的位移如圖9所示. 0 s時(shí),位移曲線保持水平,表明上層底板沒有開始運(yùn)動(dòng);7 s時(shí),爬桿機(jī)器人的上層底板開始在豎直方向移動(dòng);9 s時(shí),爬桿機(jī)器人的上層底板提升到最頂端,移動(dòng)距離150 mm.
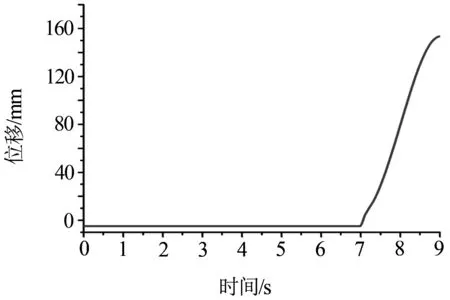
圖9 上層底板在豎直方向的位移
在一個(gè)步態(tài)周期內(nèi),爬桿機(jī)器人的上層底板質(zhì)心在豎直方向的速度如圖10所示. 0 s時(shí),速度曲線保持為零,表明上層底板沒有開始運(yùn)動(dòng);7 s時(shí),速度開始逐漸變大;8s時(shí),速度達(dá)到最大值120 mm/s;8 s后,速度開始減小,由于齒輪與齒條的接觸力產(chǎn)生振蕩,導(dǎo)致速度發(fā)生波動(dòng);9 s時(shí),速度為零.
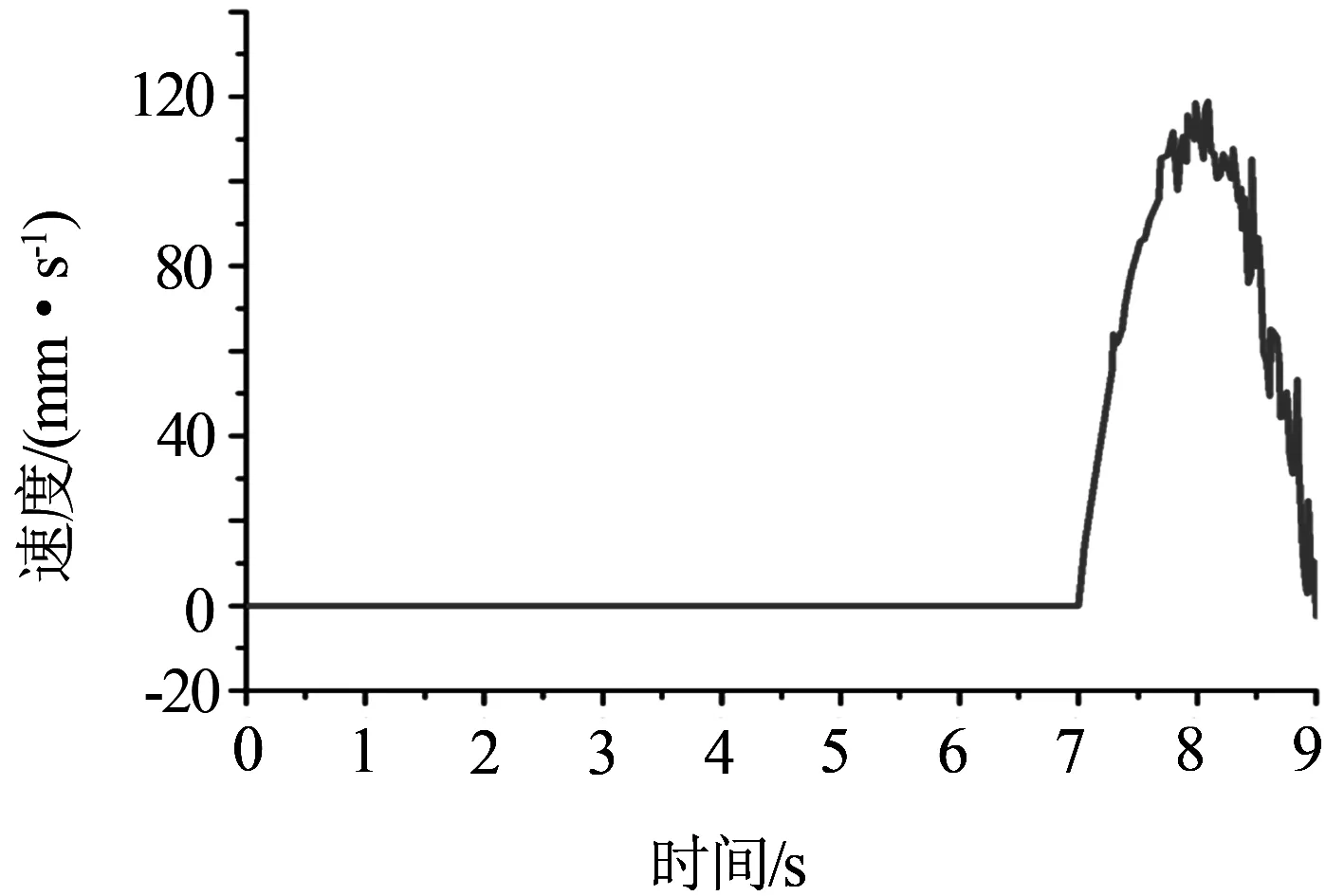
圖10 上層底板在豎直方向速度
在一個(gè)步態(tài)周期內(nèi),爬桿機(jī)器人齒輪與齒條的接觸力如圖11所示. 0~2 s,齒輪與齒條的接觸力一直處于最大值950 N,表明齒輪與齒條沒有發(fā)生相對(duì)移動(dòng);2 s時(shí),齒輪與齒條的接觸力急劇減小,此時(shí)處于上層底板夾緊、下層底板松開的狀態(tài);2~4 s,齒輪與齒條的接觸力產(chǎn)生波動(dòng),此時(shí)處于爬桿機(jī)器人提升階段;4~5 s,齒輪與齒條的接觸力產(chǎn)生波動(dòng),此時(shí)處于下層機(jī)械手運(yùn)動(dòng)狀態(tài);5~6 s, 齒輪與齒條的接觸力逐 漸 變大, 此時(shí)上層底板和下層底板都處于夾緊狀態(tài);6~6.5 s,齒輪與齒條的接觸力逐漸變小, 此 時(shí)處于上層底板
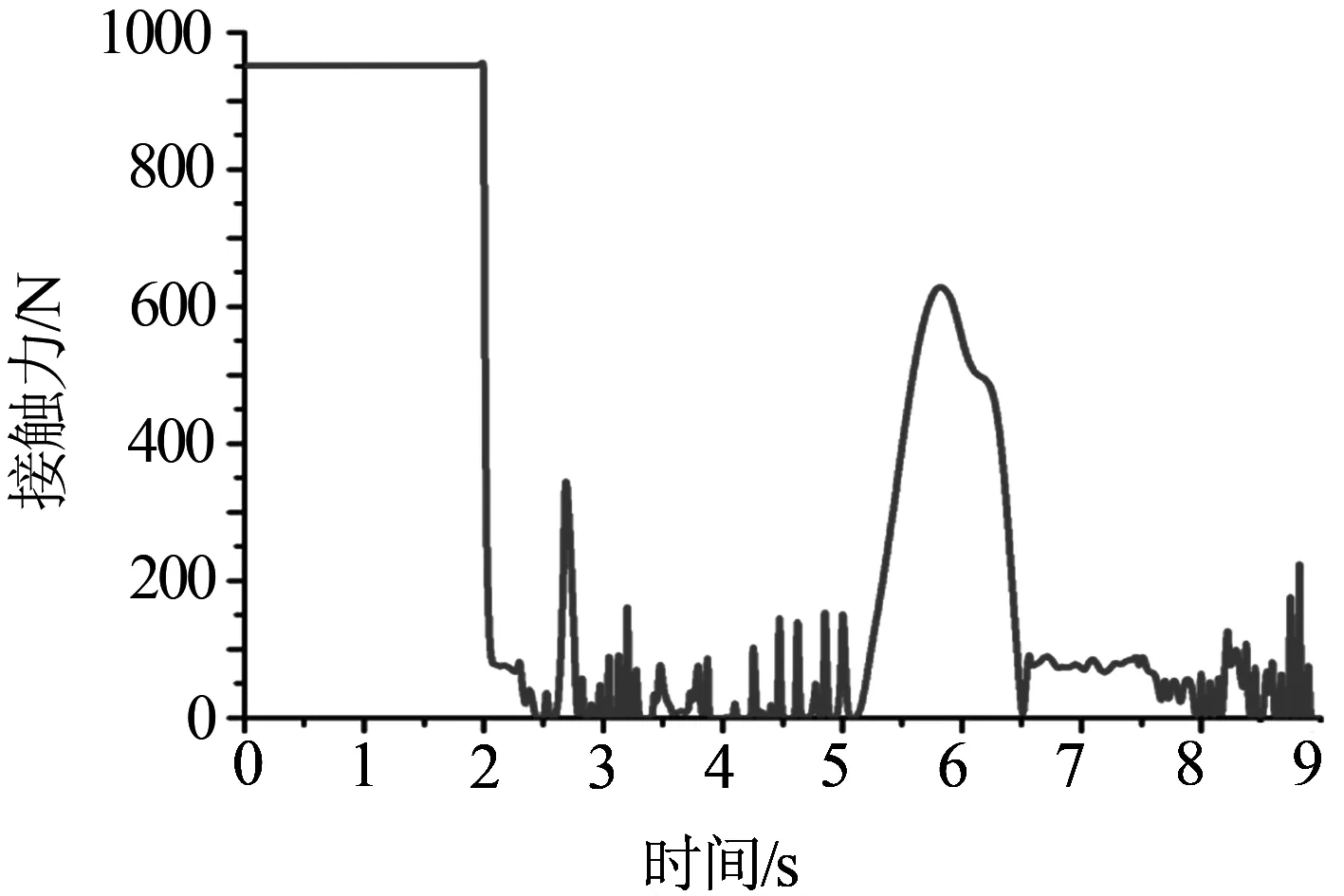
圖11 齒輪與齒條的接觸力
松開、下層底板夾緊的狀態(tài);6.5~7 s,齒輪與齒條的接觸力產(chǎn)生波動(dòng),此時(shí)處于上層機(jī)械手運(yùn)動(dòng)狀態(tài);7~9 s,齒輪與齒條的接觸力產(chǎn)生波動(dòng),此時(shí)處于爬桿機(jī)器人提升階段.
4 結(jié)論
(1)通過分析樹袋熊的攀爬步態(tài)和關(guān)節(jié)角度,獲得樹袋熊的攀爬特性,為爬桿機(jī)器人的結(jié)構(gòu)設(shè)計(jì)提供仿生基礎(chǔ);
(2)通過三維建模和仿真分析,獲得爬桿機(jī)器人上層底板與下層底板在豎直方向的移動(dòng)距離均為150 mm,爬桿機(jī)器人上層底板與下層底板在豎直方向的速度變化范圍均為0~20 mm/s,爬桿機(jī)器人齒輪與齒條的最大接觸力950 N,為后續(xù)的結(jié)構(gòu)優(yōu)化提供參考.
