北斗衛星導航系統在近海無人水下航行器路徑跟蹤方面的應用
2021-05-24 04:51:04
全球定位系統 2021年2期
關鍵詞:單片機
(上海海洋大學 工程學院 上海 201306)
0 引言
隨著近年我國提出建設海洋強國的戰略,可用于海洋水質檢測及海平面測繪的無人水下航行器(UUV)得到了快速發展.UUV 是一種可在水下運動,具有視覺和感知系統,通過遙控操作方式,配備機械手代替或輔助人工完成水下作業任務的機電裝置[1].先進的UUV 離不開先進的導航控制系統.
北斗衛星導航系統(BDS),是我國基于國家安全和經濟社會發展自主研發的全球衛星導航系統,是為全球用戶提供全天候、全天時、高精度、高可靠的定位、導航和授時服務的國家重要時空基礎設施,繼美國的GPS,俄羅斯的GLONASS之后,第三個成熟的衛星導航系統[2].BDS 作為后起之秀,不僅擁有其他導航系統的所具有的功能,而且還擁有其他導航系統不具有的雙向短報文通信功能[3].2020 年BDS 完成了全球組網使其在交通運輸業、農業、漁業及防災減災方面得到了廣泛應用.例如姜少杰等[4]提出了一種BDS/GPS 雙模組合定位的水下機器人高精度導航定位系統,并通過設置單模定位系統作為雙模定位系統的對比方案研究雙模系統的性能,通過對實驗數據的濾波處理得出雙模定位系統比單模定位系統性能優越的結論.崔秀芳等[5]為解決漁船遇險搜救難題,提出了運用BDS 監控遠洋漁船的方法,利用BDS 系統監控范圍廣,穩定性好及獨有的雙向短報文通信優勢,實現了對遠洋漁船的實時監管及海上突發事件的及時救援.
無線信號很難抵達深海區域,所以BDS 在UUV 上的應用較少.研究結果表明,當UUV 工作在近海水深小于300m 海域時,無線電導航和衛星導航技術均可正常使用[6].本文將BDS 應用在近海UUV路徑跟蹤方面,通過UUV 定位終端接收BDS 定位數據,STM32 單片機模塊接收并處理UUV 位置數據并通過無線通訊模塊將數據發送給上位機,上位機接收、儲存并比較UUV 實際路徑數據與給定路徑數據偏差,并向STM32 模塊下達控制指令控制UUV 驅動模塊改變UUV 的航向,實現精確的路徑跟蹤.
1 UUV 系統及結構設計
UUV 是一個復雜的無人潛航系統,通常由驅動系統、控制系統(STM32 作為主控芯片)、導航定位系統、無線通訊系統、信息采集系統及載體等組成[7].本文建立的UUV 主要包括:1 對42BYGH直流無刷電機(通過電機轉速差實現轉向)、水平方向舵(STM32 控制舵機轉角實現浮潛)、雙葉螺旋槳、KXD-48-V-80AH 動力鋰電池、40A 雙向無刷電調組成的驅動系統;岸基監控平臺(主要為上位機,PC 機組成)、工控機(STM32 為主控制器)、直流穩壓模塊組成的控制系統;導航定位系統包括:MPU6000 電子陀螺儀和UM220-ⅣN北斗定位模塊.無線通訊系統主要為RS485 串口、5G 通訊及北斗短報文通訊模塊.信息采集系統包括:PCI8601 數據采集卡、圖像采集模塊、溫鹽深儀(CTD)及定點測繪模塊等.載體選擇一體化鋁合金耐壓機身(便于密封防水).圖1 為UUV 硬件系統結構.
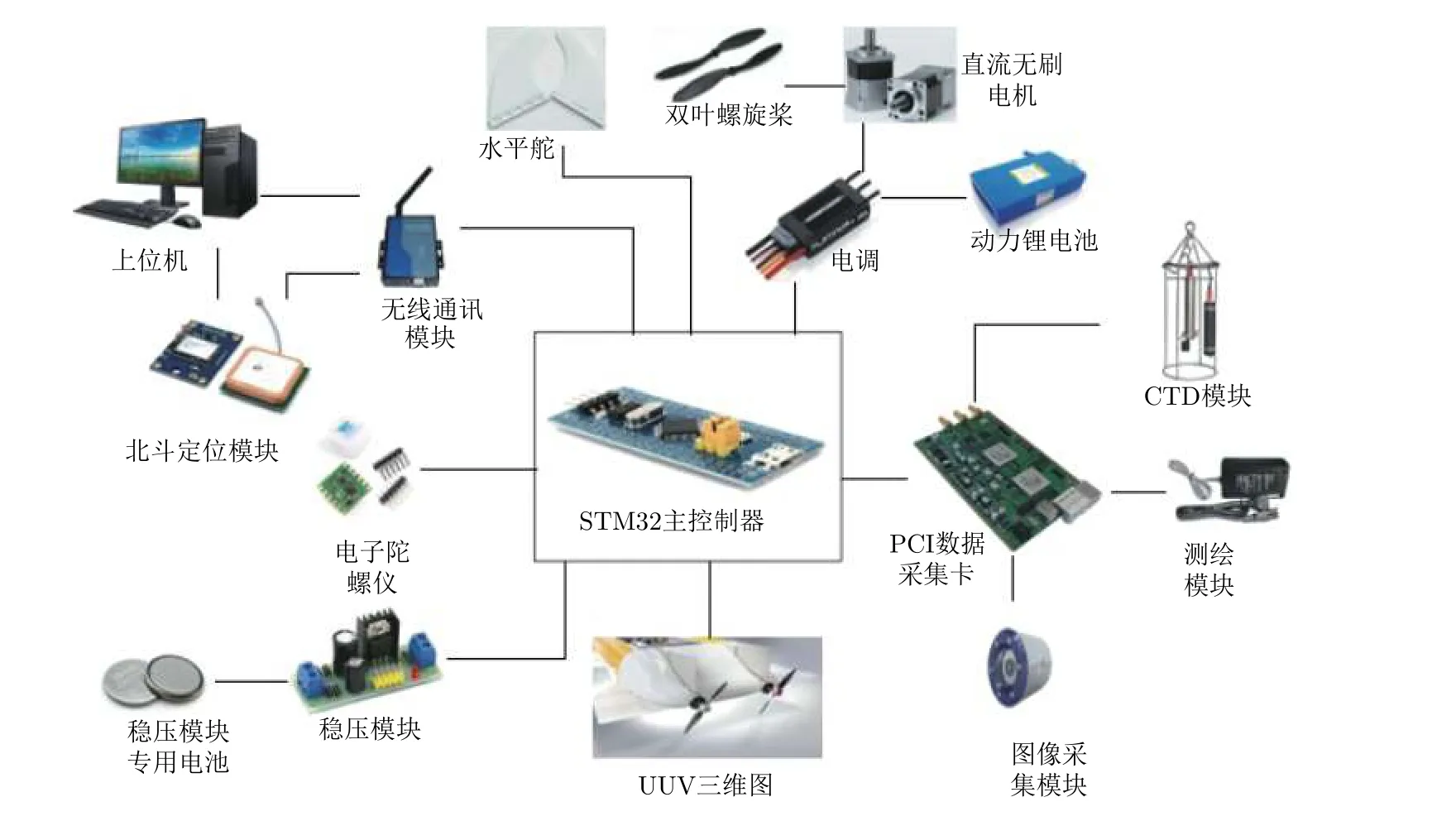
圖1 UUV 硬件系統結構
2 BDS 在UUV 上的應用
2.1 BDS 定位系統原理
UUV 在不同深度水域航行時,采用不同的導航定位方式,當工作水域深度小于300m 時,可以使用BDS 或其他無線電導航技術.
對近海UUV 進行準確定位,需要測量4 顆已知坐標的BDS 衛星到UUV北斗定位模塊之間的距離.衛星到定位模塊的距離可由真空中的光速乘以衛星信號傳播到定位模塊接收機的時間得到.假設UUV 坐標(x0,y0,z0)為未知參數,已知空間衛星端衛星的瞬時坐標為(xi,yi,zi),其中i=1,2,3,4(可由衛星星歷,衛星鐘校正參數等數據計算出),以已知衛星坐標為圓心,衛星坐標到UUV 坐標的距離為半徑,采用三維空間交會的方法計算UUV 三維空間坐標,解方程組就得到定位模塊接收機坐標,計算公式如下:
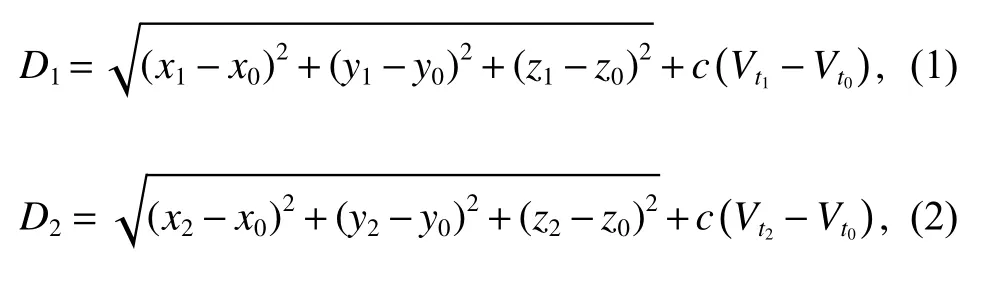
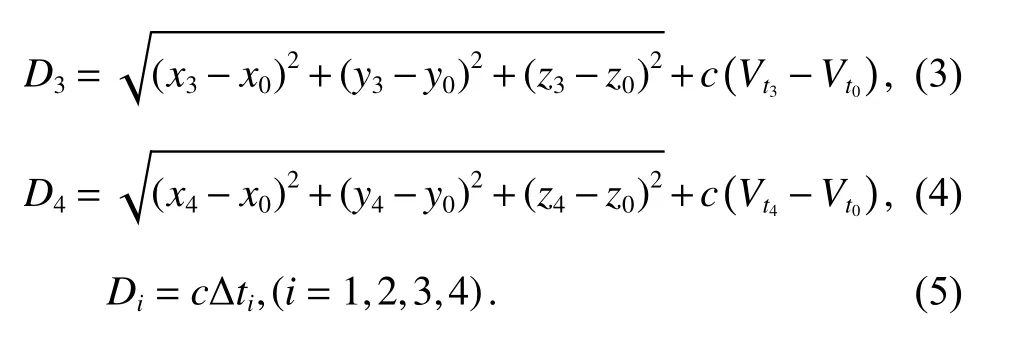
式中:Di為衛星到定位模塊觀測的距離;c為真空中的光速;?ti為衛星信號到接收機的時間;Vt0為接收機時鐘差;Vti即衛星時鐘差,由衛星星歷得出.
聯立上述方程,便可求出UUV 的空間坐標(x0,y0,z0)及接收裝置的時鐘差.圖2 為BDS 定位系統框圖.
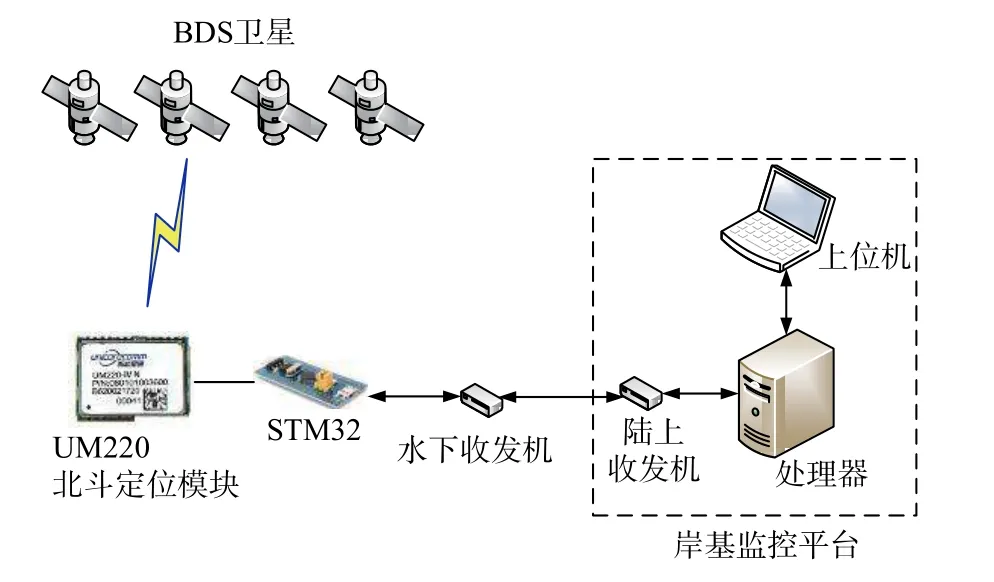
圖2 BDS 定位系統框圖
2.2 定位系統模型
當UUV 在近海海域航行時,為便于研究定位系統模型,可以將UUV 的運動看作是在二維平面xoy上的運動,因此其從E(x1,y1)點運動到F(x2,y2)點的運動模型為
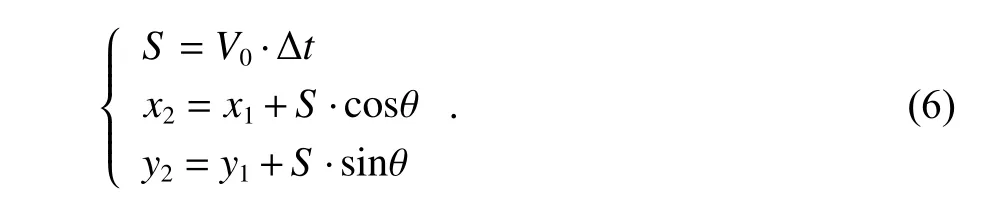
式中:V0為UUV 的初速度;θ為初始方位角;S為E(x1,y1)至F(x2,y2)點的距離;E(x1,y1)點為UUV 的初始位置,可以由北斗定位模塊測出;UUV 從E(x1,y1)點運動到F(x2,y2)點時北斗定位模塊可測出此時F(x2,y2)點的相對位置.同時F(x2,y2)點的相對位置也可以由運動模型推斷得出.兩個數據通過相互修正得到UUV 的具體位置,提高了UUV 的整體定位精度.
3 導航定位分系統的設計
導航定位分系統采用模塊化設計,包括單片機模塊,北斗定位模塊,無線通訊模塊和PC 上位機[8].當UUV 運行時,上位機向北斗定位模塊下達接受定位數據的命令,此時北斗定位模塊開啟,接收來自BDS 的導航信號,實現定位后將數據發送給STM32 單片機,STM32 單片機通過算法解析、中值濾波及卡爾曼濾波處理得出UUV精確的位置坐標、航行軌跡、航速航向等數據并通過無線通訊模塊將數據發送給上位機,上位機存儲UUV 位置數據并在界面上顯示.上位機模塊將UUV 實際運動軌跡與給定路徑進行對比,如果出現路徑偏差,上位機經過算法計算將控制命令下達給STM32 單片機,STM32 接受命令并解析后下達指令給UUV 驅動模塊,通過改變UUV 雙電機轉速差及舵機舵角控制UUV 沿給定路徑運動至特定區域,待UUV 到達目的地后,打開信息采集模塊及定點測繪模塊,采集水樣并得出水溫、鹽度、PH 值等數據并記錄采樣點位置坐標,并將采集到的數據發送到STM32單片機.單片機經過數據處理后,再發送給上位機記錄和保存.完成一次海水取樣及測繪任務后巡航至下一測繪點.圖3 為基于導航定位分系統的UUV 工作流程圖.
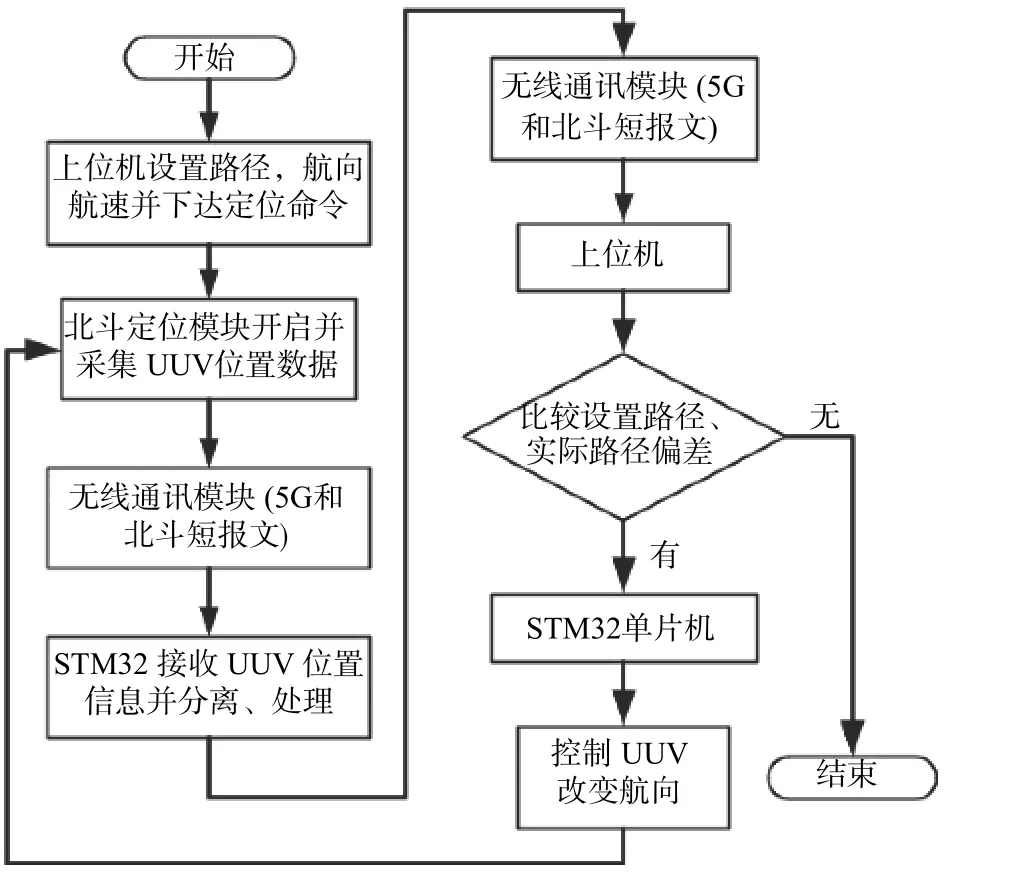
圖3 導航定位分系統的UUV 工作流程圖
3.1 單片機模塊
作為UUV 控制系統的核心.單片機負責接收北斗定位模塊傳輸的$BDGGA 格式數據,并對數據進行算法解析,采用中值濾波消除數據噪聲,卡爾曼濾波使輸出的定位數據變得更加平滑[9].并將解析后的數據通過無線通訊模塊傳送給上位機.本文選用高性能STM32 單片機,該芯片采用Cortex-M4 內核,180M主頻CPU,具有256K 的SRAM,支持SDRAM,包含140 個GPI 口,引腳為176pin,擁有更快的A/D轉換速度和更低的ADC/DAC 工作電壓[10].高性能STM32 單片機作為主控制器,一方面接收信息采集模塊采集的測繪圖像及水質參數等信息,并對數據進行解讀、分析、濾波處理后發送到岸上監控系統上位機顯示界面顯示并存儲;另一方面接收UM220-ⅣN 定位模塊采集到的UUV 實時位置,航向航速等信息.通過數據處理后經無線通訊模塊發送給上位機,上位機將其與跟蹤路徑比較進而控制UUV 沿跟蹤路徑航行.
3.2 北斗定位模塊
北斗定位模塊是UUV 導航定位分系統的核心,它的優劣決定了UUV 能否實現精確的路徑跟蹤,本文選用北京和芯星通科技有限公司研發的UM220 第四代產品UM220-ⅣN 定位模塊,該模塊主要針對車輛監控、手持終端以及船舶定位開發的BDS/GPS雙模定位模塊,采用了低功耗抗干擾GNSS SoC 芯片UC6226,主要特征如下:
1)集成度高,功耗低(53mw),尺寸小(16mm×12.2mm×2.4mm),抗干擾能力強,可以在復雜電磁場環境下工作;采用24 引腳,SMD 表面貼裝封裝技術,極大地方便了生產;
2)UM220-ⅣN 模塊可以滿足BDS 和GPS 單系統導航定位,同時可以進行BDS/GPS 雙模塊聯合導航定位,可直接輸出NMEA 數據不需要外接CPU;
3)BDS 系統亞太地區定位精度為10m,速度精度為0.2m/s,授時精度達10ns.BDS/GPS 雙模塊水平定位精度為2.5m CEP,速度精度為0.1m/s.模塊冷啟動需30s,熱啟動1s.工作溫度?40℃~+85℃,存儲溫度?45℃~+90℃,可在極端氣候環境下使用.
4)UM220-ⅣN 定位模塊中BDS 和GPS 模塊靈敏度對照如表1.

表1 BDS 和GPS 靈敏度對照dBm
選擇UM220 第四代產品UM220-ⅣN 定位模塊,可實現復雜環境中對UUV 的高精度定位,該定位模塊可方便的與STM32 單片機進行信息傳輸,也可以連接PC 機,運用軟件實現定位功能.圖4 為UM220-ⅣN 定位模塊結構框圖.
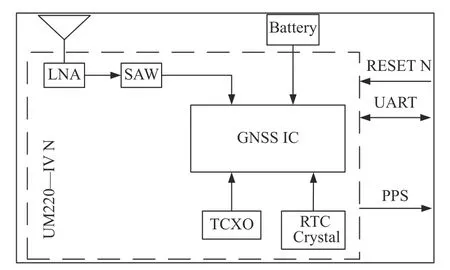
圖4 UM220-IV N 定位模塊結構框圖
3.3 無線通訊模塊
無線通訊模塊是UUV 信息傳遞的中介,對整個UUV 的導航定位及控制至關重要.本文中無線通訊模塊采用RS485 串口電路,5G 通訊模塊及北斗短報文模塊協同作用,實現BDS 衛星端、船載定位終端及地面控制端之間數據信息的雙向交換.RS485 串口相較于工業廣泛運用的RS232 串口數據傳輸速率更高(達到10Mbps),傳輸距離更遠(達到3000m),采用平衡驅動器和差分接收器的組合,抗噪聲干擾性好.滿足多數工業中信息的傳輸.5G 通信技術是目前移動通信技術發展的最高峰,其具有高速(最高可達10Gbit/s)、低功耗、低延時性能,是目前以及未來時間段內工業無線數據傳輸的主流.UUV 在近海活動中,當海上環境劇烈變化,無線通訊難以保證時,北斗定位系統所獨有的雙向短報文通信就可發揮作用.
北斗短報文通信模塊選用北京國翼恒達導航科技公司的GYM2003B,模塊采用振芯科技GM4660芯片組研制,通過北斗短報文收發信號的低噪聲放大、功率放大、上下變頻和基帶處理,實現北斗短報文收發及有源定位功能[11].模塊集成了BDS 衛星無線電定位系統(RDSS)射頻收發芯片,基帶電路,功放芯片等,具有BDS RDSS 導航定位、短報文通信及衛星授時等功能.
北斗短報文工作過程是發送方將包含接收方ID 和通訊內容的通訊申請信號加密后通過衛星轉發至地面中心站,地面中心站接收到通訊申請信號后,經脫密和再次加密后加入持續廣播的出站廣播電文中,經衛星廣播給用戶,用戶接收機接收出站信號,解調解密出站電文,完成一次通訊[12].
3.4 上位機模塊
上位機模塊主要對UUV 采集到的環境數據進行接收、顯示和存儲,同時監控UUV 路徑軌跡的變化.并根據UUV 實際運動情況發送相應的控制指令,上位機軟件界面使用Visual C++開發.可方便實現二次開發.船載北斗定位模塊將接收到的BDS 定位數據通過無線通訊模塊發送給STM32單片機,單片機將數據濾波處理后發送給上位機顯示界面,上位機對數據進行讀取,顯示及存儲.上位機的功能主要有信息顯示、遠程監控以及動態預警等.圖5 為上位機工作流程.
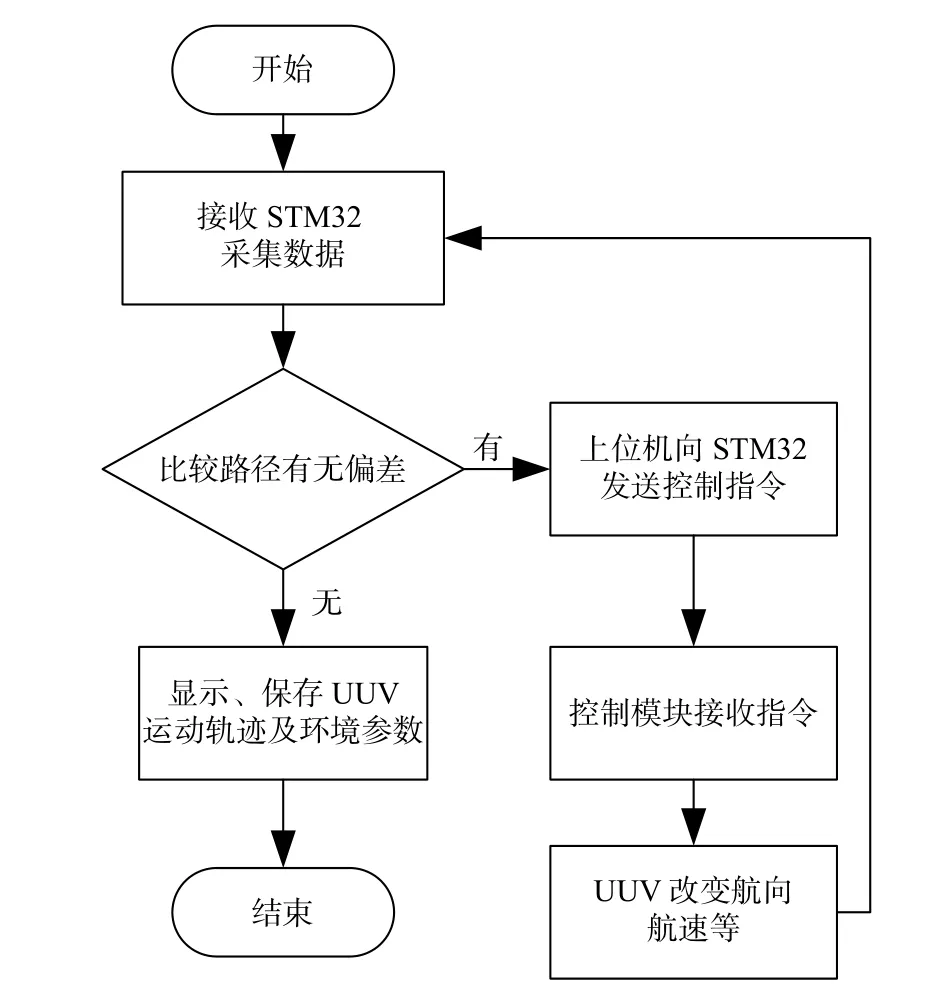
圖5 上位機模塊工作流程
4 水下測試及分析
在建立了UUV 模型及北斗定位分系統后,對UUV 以恒定速度跟蹤目標路徑進行水下實驗,將UUV 外形簡化為一個總長0.85m、寬0.50m、高0.24m 的均質方體,假定其重心與浮心重合.為了驗證UUV 路徑跟蹤情況,將UUV 實際路徑起點與目標直線路徑起點取不同坐標位置,給定UUV初始狀態:初始位置坐標(2,8),初始航向角45°.初始速度0.5m/s,水域流速為0.1m/s,目標路徑為坐標(0,0)~(60,60)的直線,目標航向角45°.UUV 開啟后,上位機軟件向其發送目標路徑軌跡,UUV 在北斗定位模塊的作用下向目標路徑靠近,在坐標點(18,18)處與目標路徑重合.圖6 為UUV 的路徑跟蹤實驗曲線圖.

圖6 UUV 路徑跟蹤線圖
上位機顯示界面在UUV 運行過程中記錄多處UUV 經緯度坐標與目標路徑經緯度坐標,如表2 所示,通過實驗可知,UUV 在初始階段距離目標路徑較遠,但在BDS 及上位機、單片機的共同作用下,UUV 不斷向目標路徑靠近,并最終沿著目標路徑運動,在路徑終點采集水質信息并運動到下一采集點.導航定位分系統運行狀況良好,并能及時修復路徑偏差.提高了近海UUV 的路徑跟蹤的精度.
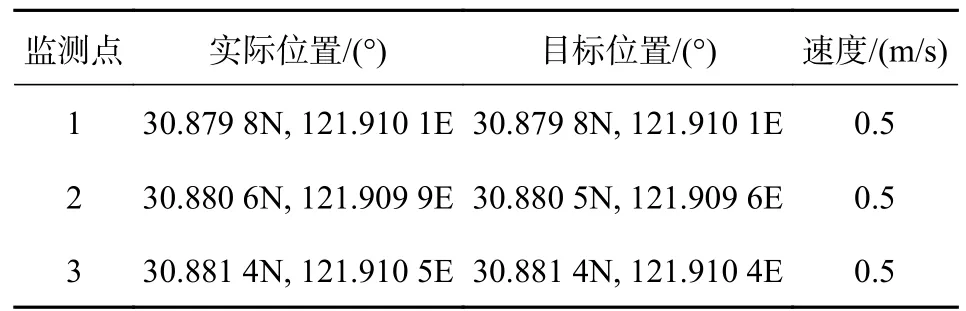
表2 UUV 目標位置與實際位置經緯度對照
UM220-ⅣN 定位模塊不僅適用于BDS 導航系統也可用于GPS 導航系統,為了驗證BDS 在UUV路徑跟蹤方面的精度,選取在GPS 作用下UUV 的路徑跟蹤實驗,比較兩者導航定位性能的優劣.圖7 為兩種導航方式下UUV 路徑跟蹤經緯度測試數據折線圖,通過比較UUV 真實曲線數據,BDS 測試數據以及GPS 測試數據可以清晰地看到,由于BDS 定位系統是具有同步軌道并能支持三個頻率工作的系統,在亞太地區BDS 的定位精度和GPS 不相上下,甚至比GPS 定位精度更高,完全滿足近海UUV 的定位導航及路徑跟蹤.
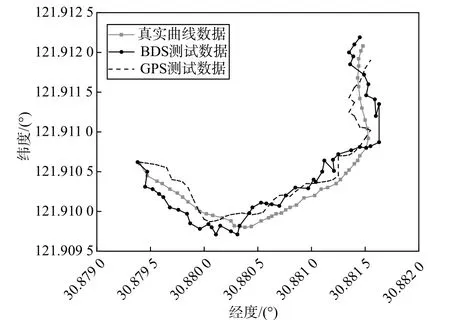
圖7 經緯度測試數據折線圖
5 結論及展望
通過將我國自主研發的北斗定位模塊運用到UUV 上,確保了UUV 能夠實時改變自身航向跟蹤目標直線路徑,北斗定位模塊實時獲取UUV 的位置坐標及航向信息,通過無線傳輸模塊將UUV 坐標信息發送到高性能STM32 單片機,經過單片機模塊的中值濾波及卡爾曼濾波,消除數據噪聲及缺陷數據.上位機模塊接收到來至單片機的數據后,一方面分析,顯示及保存;另一方面比較UUV 實際路徑與目標路徑偏差,通過高性能STM32單片機將新的控制指令發送給運動部件,控制UUV 的航向,同時采用北斗短報文通信實現了極端環境無線信號難以抵達的條件下北斗定位模塊,高性能STM32 單片機及上位機信息的雙向傳輸.通過各模塊協同配合實現了近海UUV 精確的路徑跟蹤.
由于深海中無線信號很難抵達,所以選擇BDS作為導航定位系統的UUV 只能在近海海域工作,未來要想走向深海,還需要研究基于水聲定位系統或慣性導航系統(INS)的導航定位方式.復合導航及多種控制方式結合的UUV 將是發展的趨勢.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36