利用旋轉型壓電執行器驅動的人工眼球結構*
2021-05-24 06:35:18權令偉陳學磊鹿存躍
沈陽工業大學學報 2021年3期
權令偉,陳學磊,易 超,鹿存躍
(上海交通大學 電子信息與電氣工程學院,上海 200240)
近年來隨著工業發展和物聯網規模的不斷提升[1],在數字圖像處理、模式識別理論和計算機技術的基礎上,機器視覺逐漸發展成了研究熱點.基于機器視覺,機器人擁有與人類相似的獲取外界信息、感知周圍環境、識別追蹤目標的能力.在針對機器人視覺系統的各項研究中,模擬人眼的人工眼球結構是一個重要的研究方向.
人工眼球的驅動機構主要是通過機械、光電、控制等技術,模擬人眼結構與運動形式來提出設計方案,驅動人工眼球(微鏡頭模組)進行運動.美國噴氣推進實驗室(JPL)研制的多自由度表面波電機扭矩大、響應速度較快,但此類電機驅動頻率過高,振幅較小,因此驅動能力較弱[2].2017年王開放團隊[3]研發出了一套最接近人眼視覺系統的仿生眼平臺,分別采用三個高速直流無刷電機實現左右仿生眼的三自由度協同工作;2019年山東大學的何航[4]利用球形結構的兩自由度混合式電磁步進電機組建了仿生眼用驅動系統,并進行目標跟蹤試驗測試,驗證了所搭建驅動系統的優良性能;同年,來自天津理工大學的魏章波等[5]采用永磁球形電動機搭配工業數字相機與照明光源構建了一套視覺測量裝置,實現二自由度旋轉非接觸式的方位測量.
壓電電機因其具有分辨率高、響應時間短、結構緊湊、斷電自鎖、不受電磁干擾和控制性能良好等優良特性,且在電機尺寸減小時可基本保持效率不變[6],因此受到了精密制造業的廣泛關注.在壓電電機設計的所有已知原理中,慣性驅動原理對結構和驅動電路的要求較為簡單、摩擦較小、結構緊湊,有利于電機的進一步小型化[7-8].慣性沖量式壓電電機是利用壓電元件的伸縮變形產生的驅動力來實現負載位移,被廣泛應用于多自由度工作臺、精密定位、微型化操作、微機器人等前沿領域[9].
基于上述原因,本文設計了一款慣性沖量式旋轉型壓電執行器來驅動人工眼球做旋轉運動,并建立人工眼球驅動結構的簡化力學模型.通過對該驅動結構進行仿真分析,獲取驅動電壓等因素對結構運行速度的影響.
1 旋轉型慣性沖量式壓電執行器設計
1.1 驅動方案設計
利用旋轉型慣性沖量式壓電執行器來驅動人工眼球系統的整體結構,驅動部分組成如圖1所示.其中主模塊的上端面內嵌入微型鏡頭模組用以模擬人眼結構,該微鏡頭通過藍牙通信方式采集并傳輸圖像、視頻信息;壓電疊堆元件固定在主模塊的側壁,配重模塊固定在壓電元件的另一端,構成慣性沖量式驅動模塊.
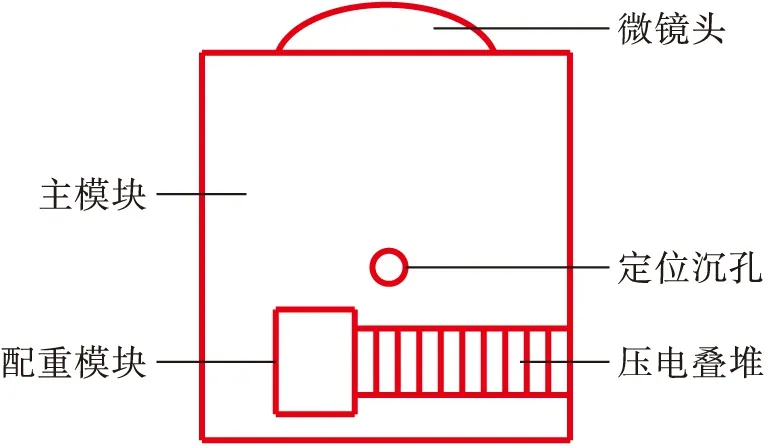
圖1 驅動部分組成Fig.1 Components of driving parts
主模塊通過上下表面內的定位沉孔,固定在一個U型夾上,使得整體結構能以微鏡頭的主光軸為中心軸線做旋轉運動.因此在人工眼球結構旋轉的過程中所需要克服的摩擦力,主要來自于主模塊與U型夾之間相對運動產生的摩擦.
1.2 驅動原理分析
根據不同的受力方式,壓電陶瓷會體現出三類不同的壓電系數:d15、d33及d31[10],分別對應不同的振動模式.當外加電場E與極化方向P平行且沿圖2a所示的3方向時,通過d33的耦合作用會激勵壓電陶瓷沿3方向做縱向伸縮振動;當電場E與極化方向P均沿圖2b所示的3方向時,壓電陶瓷通過d31耦合作用會同時產生沿1、2方向的橫向伸縮振動;當電場E與極化方向P相垂直時,壓電陶瓷會在d15作用下激發出剪切振動[11].
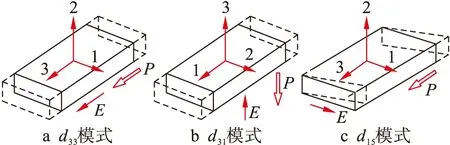
圖2 壓電陶瓷的振動模式Fig.2 Vibration modes of piezoelectric ceramic
壓電疊堆是由壓電陶瓷片、內部電極和外部電極組成,其中陶瓷片與絕緣層交替排列,整體結構可在低壓驅動下得到較大的位移輸出與力輸出.本文設計采用d33振動模式,沿著壓電疊堆中陶瓷的極化方向施加電場,將會產生與極化方向平行的線性伸縮變形.對于疊層型壓電陶瓷的使用,工作頻率設置在諧振點上會導致驅動信號與壓電陶瓷動作存在較大的差異,因此為了使疊堆的形變量與施加電壓幅值呈線性關系,所使用的激勵頻率應遠低于疊堆的諧振頻率.
沿著壓電陶瓷的極化方向,施加鋸齒波信號驅動.在周期鋸齒信號的驅動下,整體結構不斷地重復如圖3所示的工作步驟:
1) 初始階段.無電場激勵,壓電元件保持初始長度,主模塊和配重模塊都處于靜止狀態,無初速度.
2) 0~t1階段.在鋸齒波上升沿驅動下,由于逆壓電效應的作用,壓電元件產生機械變形、緩慢伸長,帶動配重模塊以微小的速度向前伸長一個位移.此時接觸面的靜摩擦力足以克服配重模塊的慣性沖擊力,因此主模塊不發生運動[12].
3)t1~t2階段.隨著下降沿電壓的急速減小,壓電元件迅速縮短.當配重模塊的慣性沖擊力大于主模塊與U型夾之間的最大靜摩擦力時[13],主模塊在慣性沖擊下繞軸旋轉.因為摩擦阻力的存在,旋轉速度會逐漸減小直到旋轉停止,在此過程中會產生一個固定步進角度.
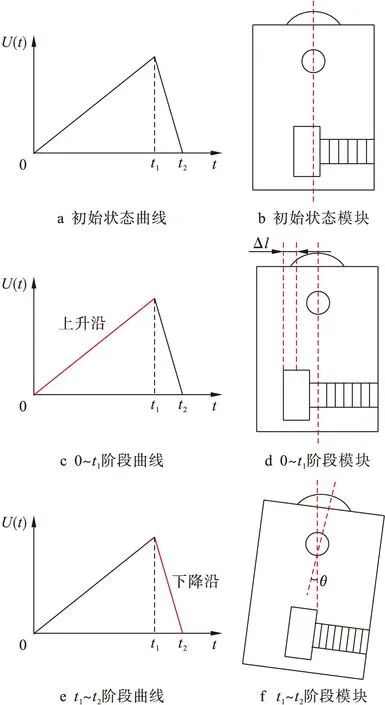
圖3 驅動結構工作過程分析Fig.3 Operation process analysis of driving structure
2 驅動系統模型簡化
(1)
F=k0αeU(t)
(2)
式中:m0為壓電疊堆的等效質量;x為給予激勵后壓電疊堆產生的位移;F為壓電疊堆在外加電壓下產生的等效沖擊力;k0為壓電疊堆沿形變方向的等效剛度系數[14];C0為壓電疊堆的阻尼系數;α為壓電疊堆的線性伸縮系數;U(t)為驅動信號的電壓幅值;e為壓電常數.
將主模塊簡化為一根質量為M的均勻剛性桿,配重模塊簡化為質量m的質量塊,并將壓電疊堆簡化為一個質量為m′、剛度系數為k、阻尼系數為C的線性彈簧.由于M>m?m′,因此壓電疊堆質量可忽略不計.人工眼球驅動系統的簡化力學模型對應的動力學方程為
(3)
式中:θ為剛性桿的旋轉角度;x1為剛性桿端點的位移;x2為質量塊的位移;Δx為x2與x1的位移差;J為剛性桿的轉動慣量;f為剛性桿在轉動過程中受到的滑動摩擦力;R為運動半徑.
剛性桿在單次步進式轉動時,其端點處運動軌跡為一段微小弧線,其弧長遠小于運動半徑R.因此可近似為一段微位移x1,對應的旋轉角度θ=x1/R.結合牛頓第二定律和剛體定軸轉動定律,可將式(3)簡化推導為
(4)
針對主模塊和U型夾相互接觸而產生的摩擦力f0,設計采用了Coulomb摩擦模型.由于壓電元件的位移并未足夠小到與摩擦界面的預滑動距離(通常是幾納米)相提并論,采用簡潔的Coulomb模型已足夠精確[15-17],即
f(v)=fcsgn(v)
(5)
fc=μ|fN|
(6)
式中:fN為法向載荷;μ為接觸面摩擦系數.f不依賴于相對滑動速度v與接觸面積,正比于法向載荷fN.
3 仿真模型搭建與結果分析
本文利用MATLAB的Simulink仿真工具搭建了旋轉型慣性沖量式壓電執行器的驅動仿真模型.主模塊體積為101.25 cm3,選取鋁作為材質.微型鏡頭質量約為30 g,因此主模塊部分的整體質量約為303.38 g.鋼質配重模塊體積為380 mm3,質量為3 g.壓電疊堆的面內中心到定位沉孔所在的轉動軸心垂直距離為7.3 mm,微鏡頭最外端到定位沉孔所在的轉動軸心垂直距離為35.8 mm,因此最外端轉動線速度約為仿真測得剛性桿端點轉動線速度的5倍.壓電驅動元件為美國Thorlabs公司生產的帶兩個平面端帽的分立式壓電疊堆(型號為PK4FQP2).在無負載狀態下其一階縱向振動的固有頻率為70 kHz,工作電壓范圍為0~150 V,最大行程為20 μm;在150 V激勵下最大驅動力為1 000 N.
仿真模型設置所需的其他參數(如壓電疊堆的等效驅動力系數等)均通過公式計算獲得,具體數值如表1所示.采用選擇變步長四階五級Runge—Kutta積分法(ode45)計算位移,相對誤差限度設置為0.001,絕對誤差限度由算法在積分過程中自動調整.
在設定的激勵信號電壓幅值為125 V、頻率為1 kHz、上升沿占一個周期的95%且滑動摩擦力fc為10 N的條件下,觀測0.02 s得到的模型剛性桿端點的位移結果如圖4所示.在周期性鋸齒波信號的驅動下端點位移始終呈現階梯式上升,此結果證明了主模塊隨壓電元件的周期性伸縮振動做單一方向上的步進式旋轉,該驅動方案具有理論可行性.
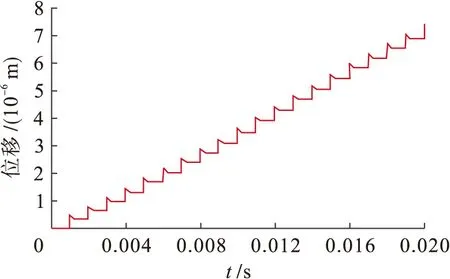
圖4 簡化模型端點的位移曲線Fig.4 Displacement curve of simplified model endpoints
3.1 激勵電壓對驅動系統的影響
設定激勵頻率為1 kHz、鋸齒波上升沿占周期比為0.95、滑動摩擦力為10 N、觀測時間為0.02 s.在[50 V,150 V]的電壓范圍內每間隔5 V取一個觀測點進行仿真觀測,將端點位移變化數據循環導入MATLAB,采用Polyfit函數對位移曲線做線性擬合即可獲取剛性桿端點處的轉動線速度.端點處轉動線速度隨電壓的變化情況如圖5所示,在該范圍內,端點處的轉動線速度隨著電壓的增大而逐漸增大.
由于壓電陶瓷存在遲滯現象,且激勵電壓越大,其非線性特性會越突出,因此在搭建實體設備進行測試時,根據所選的壓電陶瓷產品特性,選取115~125 V作為工作電壓,既能夠保證有穩定的工作狀態,又可以搭配SGS閉環控制系統較好地控制非線性干擾.
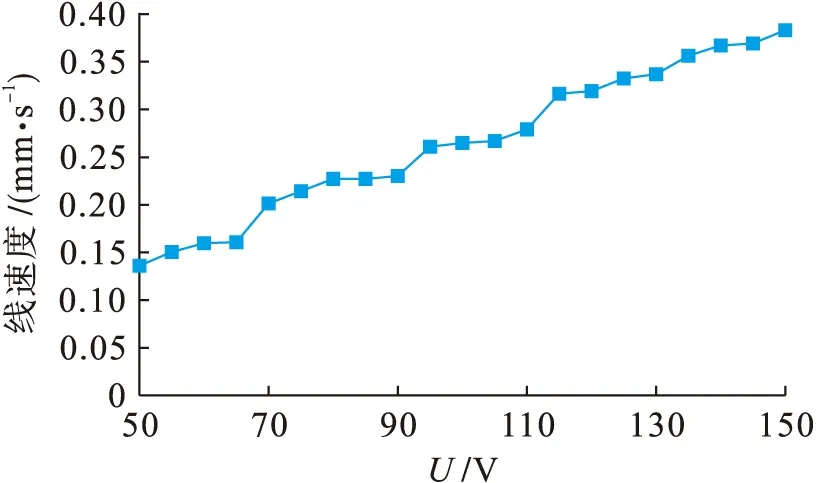
圖5 轉動線速度隨電壓變化曲線Fig.5 Changing curve of rotary linear speed in relation with voltage
3.2 激勵頻率對驅動系統的影響
取激勵電壓為125 V,在鋸齒波上升沿占周期比為0.95、滑動摩擦力為10 N、觀測時間為0.02 s的條件下,在[500 Hz,1 500 Hz]的頻率范圍內每間隔50 Hz取一個頻率點進行仿真觀測.所獲取的剛性桿端點處轉動線速度隨頻率變化情況如圖6所示,端點處的線速度在[500 Hz,1 050 Hz]范圍內,基本上隨著頻率的增大而逐漸增大,當激勵頻率增大至1 050 Hz時測得端點線速度為0.427 mm/s.在[1 050 Hz,1 500 Hz]范圍內,端點線速度基本上隨著頻率的增大而逐漸減小.
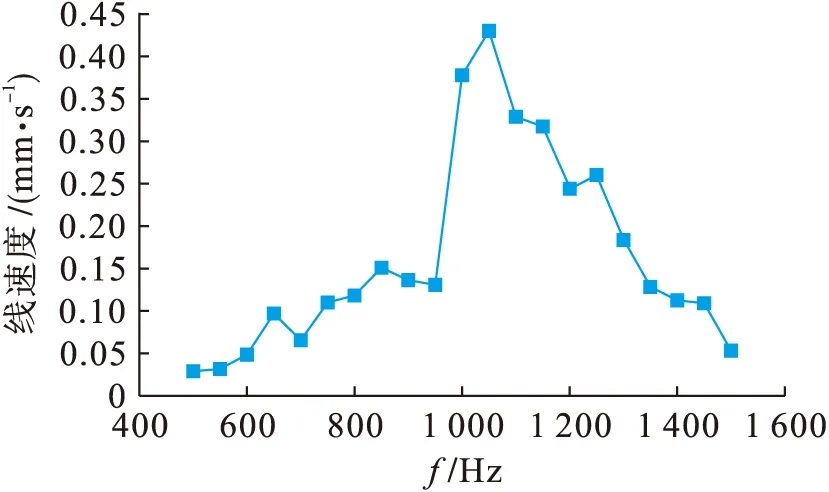
圖6 轉動線速度隨頻率變化曲線Fig.6 Changing curve of rotary linear speed in relation with frequency
所選取的壓電疊堆產品在大于1 kHz的高頻激勵下會迅速升溫,影響陶瓷的極化,導致其性能下降.受到疊堆的溫度特性影響,在實際測試過程中為保證較穩定的工作狀態,選取800~1 000 Hz作為激勵信號頻率.
3.3 滑動摩擦力對驅動系統的影響
滑動摩擦力的大小與U型夾和主模塊間的預壓力相關,設定激勵電壓為125 V、激勵頻率為1 kHz、鋸齒波上升沿占周期比為0.95、觀測時間為0.05 s.在[1 N,15 N]范圍內取多個觀測點進行仿真觀測,獲取的端點轉動線速度隨摩擦力變化情況如圖7所示.在該范圍內,隨著摩擦力的增大,轉動線速度整體上基本呈現下降趨勢.當滑動摩擦力減小至2 N時,端點的轉動線速度達到0.362 mm/s,對應的微鏡頭外端線速度為1.810 mm/s;當滑動摩擦力減小至1 N時,端點的線速度達到0.405 mm/s,對應的微鏡頭外端線速度為2.025 mm/s.
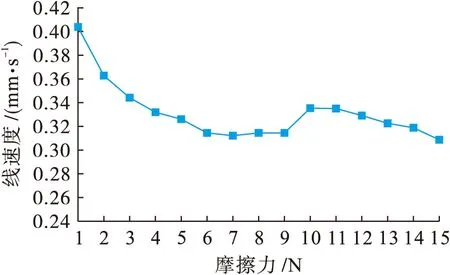
圖7 轉動線速度隨滑動摩擦力變化曲線Fig.7 Changing curve of rotary linear speed in relation with sliding friction
3.4 上升沿占周期比對驅動系統的影響
鋸齒波驅動信號的上升沿占周期比會直接影響執行器的驅動效果,上升沿占比過高,會導致執行器無法實現步進式驅動;占比過低,會導致慣性沖擊力不足,驅動速度過于緩慢.在上述實驗選定的最適于實際測試的電壓范圍[115 V,125 V]與最佳頻率范圍[1 050 Hz,1 500 Hz]內,選取多個數據點,改變所設定的初始電壓值與頻率值進行多次仿真.仿真結果表明,在當前頻率范圍內,當上升沿占周期比高于0.96時,不能獲得步進式上升的穩定位移曲線,無法滿足驅動要求;上升沿占周期比低于0.86時,位移曲線趨于平緩,驅動速度過慢.
在[0.86,0.96]取值范圍內,每間隔0.01取一個測試點,觀測時間為0.02 s,多次仿真觀測在不同的初始條件下最佳周期比是否有變化.所獲取的端點線速度隨上升沿占周期比的變化曲線如圖8所示.
保持激勵電壓為125 V、滑動摩擦力為10 N不變,選取5個頻率點進行觀測,其結果如圖8a所示.在950 Hz與1 000 Hz的激勵下,最佳上升沿占周期比為0.95,此時端點線速度達到峰值;在其余觀測頻率的激勵下,最佳上升沿占周期比為0.96.在相同的激勵電壓下,主模塊受到沖擊后減速至停止旋轉這一過程所耗費的時間t0固定,激勵頻率越高,上升沿所占時間t1越小,為保證t0始終小于t1,需適當調大上升沿占周期比.
保持激勵頻率為1 kHz、滑動摩擦力為10 N不變,選取3個電壓點進行觀測,其結果如圖8b所示.在選定的電壓范圍內,激勵電壓的變化對最佳上升沿占周期比暫未造成較大影響.當激勵電壓為125 V、上升沿占周期比為0.95時,端點轉動線速度達到峰值0.332 mm/s,對應的微鏡頭外端線速度為1.660 mm/s.
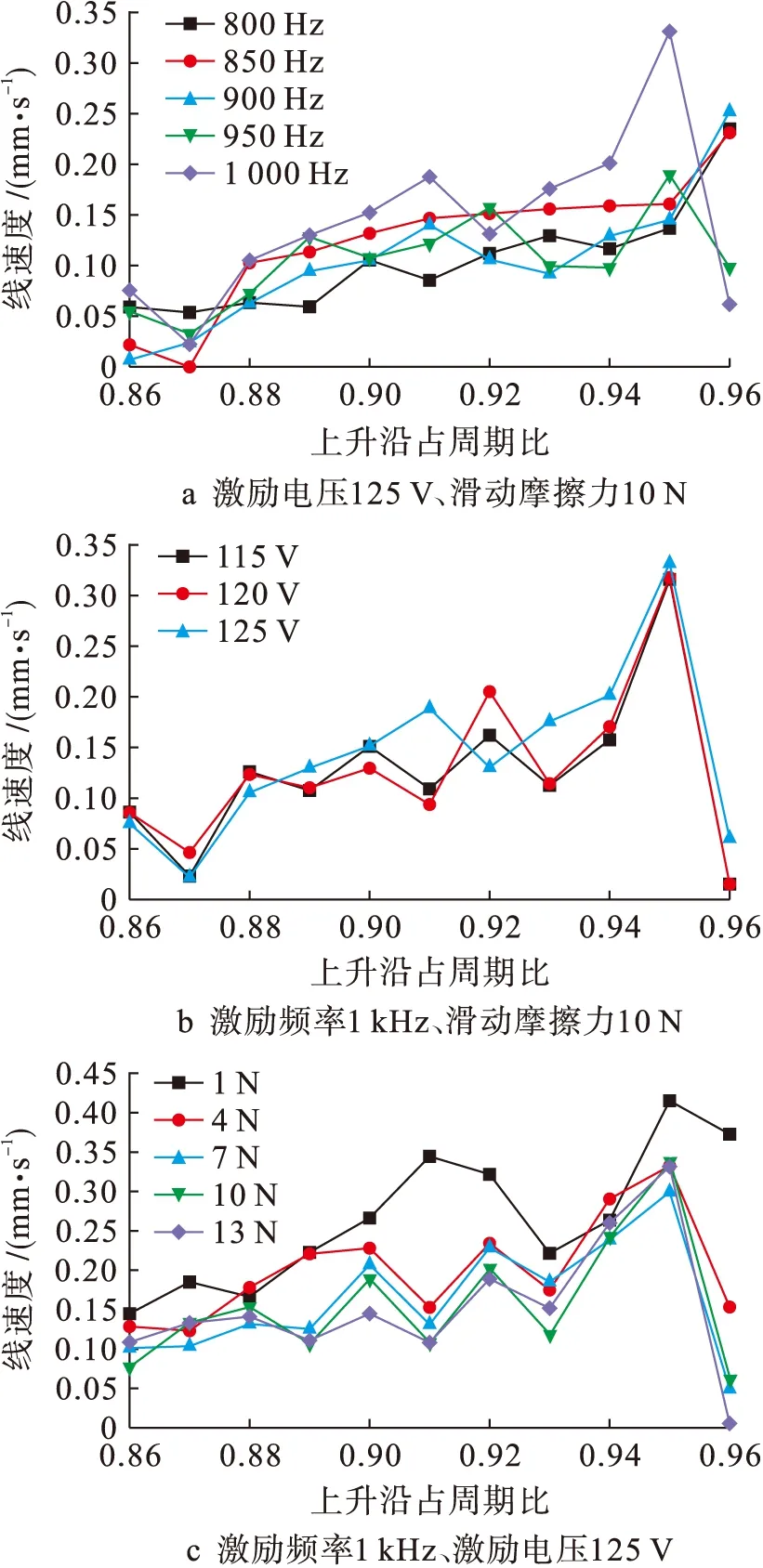
圖8 轉動線速度隨上升沿占周期比變化曲線Fig.8 Changing curve of rotary linear speed in relation with rising edge ratio in one period
保持激勵頻率為1 kHz、激勵電壓為125 V不變,在[1 N,13 N]范圍內選取5個摩擦力數據點進行觀測,其結果如圖8c所示.在選定范圍內,摩擦力的變化對最佳上升沿占周期比暫未造成較大影響.當滑動摩擦力為1 N、上升沿占周期比為0.95時,端點轉動線速度達到峰值0.415 mm/s,對應的微鏡頭外端線速度為2.075 mm/s.
4 結 論
文中提出了一種利用旋轉型慣性沖量式壓電執行器來驅動人工眼球整體結構的設計方案.同時,本文使用控制變量法探究驅動信號的上升沿占周期比、激勵電壓、激勵頻率和滑動摩擦力對旋轉速度的影響.通過對主模塊線速度變化的曲線圖進行分析,可獲取各類參數的最佳測試范圍,為之后搭建實體驅動系統奠定了理論基礎.由于采用壓電疊堆作為驅動原件,該驅動結構的單次步進位移為微米級,精度高、響應快,可實現精確跟蹤與定位;同時相較于電磁驅動,壓電疊堆驅動的功耗偏低,且結構緊湊有利于實現跟蹤設備的微型化.
后續可以通過改進結構設計和材料選型來減輕主模塊質量、適當增大配重模塊質量、優化疊堆選型,并引入超聲減摩技術來實現滑動摩擦力的減弱,從而提高整體的運行速度.
