扒斗式裝載機工作機構運動仿真分析
2021-05-28 21:34:38黨永強
內燃機與配件 2021年8期
黨永強
摘要:煤礦巷道施工機械領域采用液壓扒斗式裝載機技術,可以加快施工速度、降低工人的勞動強度,而且在巷道、隧道、水電涵洞等施工方面具有廣闊的應用前景。本文采用現代設計理論和方法對液壓裝載機工作機構進行運動仿真研究。論述了扒斗式裝載機工作機構特點,通過機構分析,歸納出了斗齒尖的運動方程。對扒斗式裝載機工作機構進行了三維建模,并進行了虛擬裝配。在三維建模的基礎上對扒斗式裝載機的工作機構進行了運動仿真并對關鍵點斗齒尖的軌跡曲線進行了繪制。本文內容為新型裝載機的研制提供了理論基礎,具有重要的工程實際意義。
關鍵詞:扒斗式裝載機;運動分析;運動仿真
中圖分類號:E923.39? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)08-0062-02
0? 引言
目前巖巷施工主要使用上面提到的裝載設備,其各有優缺點,但都不能同時具備連續裝載、運輸、清理等功能[1]。在目前“高產高效礦井”的要求下,如何在安全的條件下提高巷道施工速度,提高礦井建設的效率,已是迫在眉睫的問題。應用高效新裝巖設備可以提高掘進速度,減輕工人勞動強度,改善現場勞動條件[2,3]。本文針對扒斗式裝載機工作機構進行了三維建模、并進行了虛擬裝配。在三維模型的基礎上對工作機構進行了運動仿真,繪制了斗齒點的運動曲線,為裝載機工作機構提供了設計模型及參數設計方法。本文研究實現了從二維圖紙設計向三維模型設計的參數化、集成化設計。為新型裝載機的研制提供了理論基礎,具有重要的工程實際意義。
1? 工作機構設計
扒斗式裝載機是前面扒取物料,在設備后方卸載,采用分層扒取物料的施工工藝,行走方式為履帶式。可連續將矸石集中、扒取、輸送到梭式礦車或其它運載設備上。主要特點為:①煤、巖皆可裝載,適用于煤巷、巖巷和地面煤場,也可用于井底水倉清理。②集裝載、運輸、行走于一體的全液壓裝載設備,后配套方式靈活合理。還能和礦用車、刮板運輸機及帶式運輸機等礦用運輸設備進行配合使用。③可在高瓦斯礦井巷道使用,依靠液壓方式控制,履帶行走距離短。其可作為鋼絲繩耙斗裝巖機、側卸式裝巖機、裝煤機的替代品。④采用履帶行走,機動靈活,扒斗能夠左右擺動,扒掘范圍大,裝巖寬度受限制小,可以全斷面裝巖,不留死角,對巷道斷面有很強的適應性。⑤扒斗部分可對大塊落料二次破碎,便于裝載。⑥裝載平穩、不灑料,高效、連續性強,是全液壓鉆眼臺車的最佳配套設備,機械化程度高。
扒斗式裝載機的工作機構能夠實現挖掘動作的執行,是整機功能實現的執行部分。扒斗式裝載機的工作機構是包括以下三個主要組成部分。包括動臂結構、斗桿結構以及扒斗結構,并且三個部分依靠鉸連接進行組裝。而對于三個組成部分功能的實現,需要液壓驅動原件給予動力。為滿足現場施工的需求,還能配合礦用車、刮板運輸 機及帶式運輸機等礦用運輸設備進行配合使用。工作機構執行工作指令時,通過控制液壓驅動原件中的閥體,即可實現執行機構能夠在±45°范圍內執行挖掘任務。待挖掘任務完成之后,動臂結構與斗桿結構執行動作,將物料運輸至裝載部分。然后,裝載部分再將物料進行二次裝載,進行運輸。
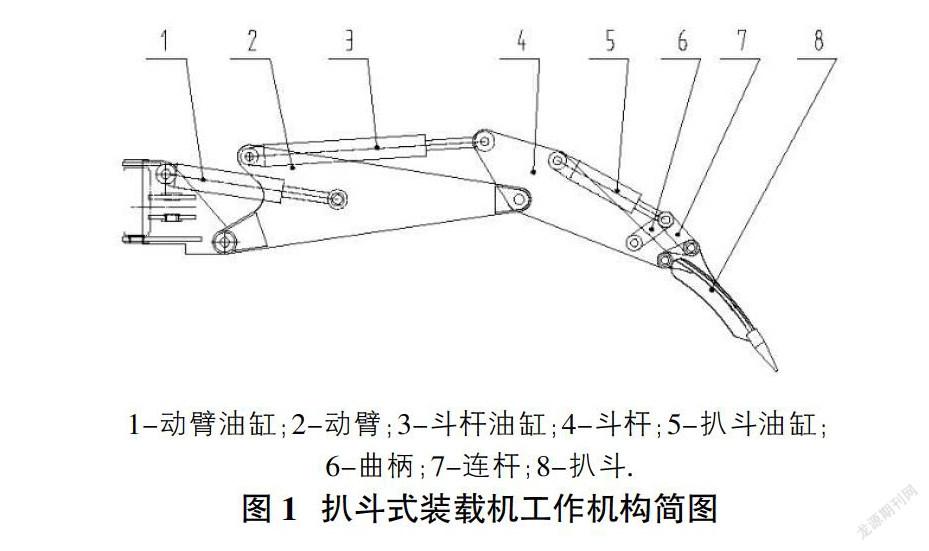
扒斗式裝載機工作機構簡圖如圖1所示。工作機構主要有6個組成部分,包含扒斗8、連桿7、曲柄6、斗桿4、動臂2以及動臂油缸1、斗桿油缸3、扒斗油缸5三組液壓缸等部分。工作機構動臂部分通過鉸連接與裝載機轉臺相連。工作機構通過控制動臂液壓缸動作,實現動臂及工作機構整機進行運轉。通過扒斗油缸動作,實現斗桿能夠環繞動臂進行旋轉運動。扒斗安裝于斗桿部分的前端,通過控制扒斗油缸與連桿動作,進而實現扒斗動作的執行。
扒斗式裝載機工作過程中,首先通過控制轉臺旋轉,實現工作機構停留在所需挖掘位置。通過控制動臂液壓缸動作,實現動臂及工作機構整機進行運轉。通過扒斗油缸動作,實現斗桿能夠環繞動臂進行旋轉運動。扒斗安裝于斗桿部分的前端,通過控制扒斗油缸與連桿動作,進而實現扒斗動作的執行。
扒斗式裝載機工作過程中,因待裝物料情況、堆集物料面等條件不同。因此機構中三種液壓缸在執行挖掘動作時,三者的配合是多樣且靈活的。工作時,典型的挖掘工況有扒斗扒掘、斗桿扒掘、聯合扒掘三種。扒斗扒掘工況采用扒斗油缸單獨進行扒掘,常用于清除障礙以提高生產率;斗桿扒掘工況采用斗桿油缸單獨進行扒掘。在聯合扒掘 工況當中,扒斗油缸與斗桿油缸需要進行復合動作進行挖掘。正常工作時以斗桿扒掘為主,扒斗扒掘為輔。
裝載機工作機構的動臂與斗桿均是變截面的箱梁結構,扒料斗是采用鋼板焊接而成。各油缸可被看作是只承受拉壓載荷的桿。為了研究方便,可以對工作機構進行適 當簡化處理。
2? 工作機構運動學分析
工作機構中,扒斗直接接觸工作面,它執行了類似人的手部扒掘的運動,采用了類似機械手的機構,扒斗位置參數是動臂油缸的長度L1、斗桿油缸的長度L2和扒斗油缸的長度L3的函數。下面針對斗齒尖進行運動學分析,運動計算簡圖如圖2所示。
齒尖處,CQ 連線與水平線夾角,有如下關系式:
CQ連線在水平線之上,ψ1為正,反之為負。最終可以得到:
3? 工作機構運動學仿真
運動學仿真基于三維模型,本文采用Pro/Engineer 軟件對其工作機構進行三維實體建模,并進行了虛擬裝配。運動仿真利用計算機方法,模擬各種作業過程,將各作業時的真實狀態反映出來,并檢查干涉情況和分析構件在作業過程中的載荷與強度狀況。仿真流程介紹如下:若想實現工作機構的運動學仿真,首先需要按照實體進行三維模型的構建,并且所建模型需符合實際工況要求及尺寸要求。待模型建立完成之后,對之進行相關問題研究的方法,以便分析要研究的內在特性、運行規律、相關關系。
由于本文直接采用Pro/Engineer軟件對其工作機構進行三維實體建模及裝配,因此,結合Pro/Engineer軟件的綜合特性,可直接采用Pro/E各功能模塊進行仿真,可有效地避免模型導入其他分析軟件中模型特性不兼容問題的出現。通過Pro/E功能模塊軟件進行工作機構的靜態及動態仿真分析,可實現對運動機構路徑軌跡、所需變量及各參數表格等參數的輸出。依據仿真分析結果,可為相關設計提供所需要的可靠依據。
實現運動仿真,工作機構應在設定的條件實現相應的功能。針對裝載機復雜的工況需求,在對工作機構進行結構設計過程中,首先需要滿足工作機構的強度與剛度要求。除此之外,以下幾點要求還需進一步的考慮。首先,工作機構在預設的工作條件下還需將其構造成幾何可變結構。其次,在完成工作循環中全部功能的每個位置,都應實現各對應位置的相關功能。扒斗安裝于斗桿部分的前端,通過控制扒斗油缸與連桿動作,進而實現扒斗動作的執行。在對機構進行運動仿真過程中,首先,需要進行運動干涉的檢驗,保證工作機構能夠正常運行。其次,工作機構需要按照額定需求滿足各種動作的實現[4]。
采用 Pro/Engineer軟件的機構(Mechanism)模塊實現運動仿真。在Pro/Engineer的“機構(Mechanism)”模塊中,可在設計好參數后,由計算機進行一個機構的機械運動仿真,還可以將其結果輸入到Pro/MECHANICA中,以便于用戶進行進一步的力學分析與處理。并且,用戶通過“回放”功能來捕獲運動圖像,將“機械模型”創建一個動 畫序列[5]。使用約束條件將固定關系的零部件裝配,再將運動的零部件進行裝配,再進入機構模塊,運用手工拖拽零件試驗裝配,再進行參數設置,添加伺服電動機,最后進行分析及仿真,輸出分析結果。
利用 Pro/Engineer 進行干涉檢驗非常方便,充分體現了計算機虛擬設計及虛擬裝配的優越性。進行運動干涉仿真的主要目的是分析工作機構連桿機構在執行運動指令時,可能出現的運動干涉及“死點位置”。此命令是確保工作機構正常執行命令的基礎。由于工作機構的干涉問題較為復雜,單獨在圖紙上模擬分析耗用較多時間,這在設計中是一個繁瑣且迫切需要解決的難題。
現有的干涉檢驗方法是通過分析各桿件的長度是否存在尺寸干涉,并將利用各桿件繪制成圖進行檢驗。此方法存在檢測效率度、檢測精度低的缺陷。相對來講,在使用 Pro/Engineer進行運動仿真分析過程中,運用軟件動態運行命令可自動檢測各桿件在運動過程中存在的干涉問題。操作簡單有效且精度較高。
4? 結束語
本文采用現代設計理論和方法對液壓裝載機工作機構進行運動仿真研究。論述了扒斗式裝載機工作機構特點,通過機構分析,歸納出了斗齒尖的運動方程。對扒斗式裝載機工作機構進行了三維建模,并進行了虛擬裝配。在三維建模的基礎上對扒斗式裝載機的工作機構進行了運動仿真并對關鍵點斗齒尖的軌跡曲線進行了繪制。本文內容為新型裝載機的研制提供了理論基礎,具有重要的工程實際意義。
參考文獻:
[1]余志鵬.礦用裝載機連桿機構研究與優化設計[J].機械工程師,2020(10):133-134,137.
[2]尹文興.裝載機工作裝置機構—結構分析與設計研究[D].天津大學,2016.
[3]王菊.裝載機工作裝置機構創新設計方法的研究[D].大連理工大學,2012.
[4]郭衛,李富柱,薛武. 基于 Pro/Engineer軟件的裝載機工作裝置虛擬樣機與仿真分析[J]. 工程機械,2005(3):31-34.
[5]戴國洪,孫奎洲,張友良.基于 Pro/ Engineer 的裝配過程動態仿真與干涉檢驗[J].機床與液壓,2003(6):64-66.