改進滑模極值搜索控制在阻抗匹配的應用
2021-05-29 01:14:54李穎暉武頌堯邱梟楠
空軍工程大學學報 2021年2期
關(guān)鍵詞:系統(tǒng)
李穎暉, 武頌堯, 林 茂, 邱梟楠, 李 勐
(1.空軍工程大學航空工程學院,西安,710038;2. 國防科技大學軍事職業(yè)教育技術(shù)服務中心,長沙,410037)
等離子體隱身技術(shù)是一種主動反雷達隱身技術(shù),依靠自身特殊的物理性質(zhì)以及對電磁波的特殊作用來達到隱身目的[1-4]。等離子體放電一般使用大功率射頻電源。目前已有使用13.56 MHz射頻電源應用于電磁散射方面的研究[5-7],但存在電源體積較大的缺點且電源效率較低,不適于在飛行器的應用。因此,需要通過合理的小型化等離子體放電電源設計,在提高電源效率不增加飛機總功率負荷的基礎上,有效降低其RCS。針對小型化高效率的設計要求,本文通過優(yōu)化設計射頻電源阻抗匹配控制方法提高電源效率。
張春雷首次利用極值尋優(yōu)控制(extreme seeking control, ESC)對射頻等離子體阻抗進行實時匹配,大大加快了等離子體負載的匹配速度提高耦合功率[8]。為提高ESC的控制性能許多人對其展開了研究,殷春等人利用分數(shù)階微積分方法,改進SM-ESC提出了一種分數(shù)階算法FO-SMESC,該方法有效的提高系統(tǒng)的快速性和魯棒性但控制方法較為復雜[9]。文獻[10]采用模糊規(guī)則優(yōu)化分數(shù)階的控制作用,減小了算法的穩(wěn)態(tài)震蕩。此外,極值搜索算法可以與其他控制方法進行結(jié)合,達到控制參數(shù)優(yōu)化的效果。文獻[11]提出一種嵌入粒子群優(yōu)化算法優(yōu)化SMESC的控制參數(shù),提高了追蹤精度,降低功率損失,但是忽略了隨機擾動的影響。文獻[12]通過構(gòu)造SMESC的目標函數(shù),并使用時間加權(quán)絕對誤差I(lǐng)IWO優(yōu)化算法對積分增益和增長率進行在線優(yōu)化,降低穩(wěn)態(tài)振蕩和收斂時間,但是該方法在減小系統(tǒng)穩(wěn)態(tài)幅值的同時算法的復雜度較高。
本文使用另一種較為簡單的終端滑模的方法對SMESC進行改進。針對傳統(tǒng)SM-ESC在快速尋優(yōu)的同時引入較大的穩(wěn)態(tài)振蕩的缺點,結(jié)合終端滑模方法提出改進的快速終端滑模極值搜索控制。在保證系統(tǒng)的穩(wěn)態(tài)振蕩幅值減小的條件下,同時提高了收斂速度,并且在一定程度上減小了系統(tǒng)計算的復雜度。為等離子體隱身電源小型化提供了一種新的優(yōu)化設計方法。
1 阻抗匹配
射頻等離子源一般由信號源、功率放大器、匹配網(wǎng)絡三部分構(gòu)成。匹配網(wǎng)絡的作用為阻抗變換即將給定阻抗變換為需要的阻抗,實現(xiàn)最大功率傳輸。由傳輸線理論,源功率減去反射功率即為負載功率Pl=Pf-Pr。負載功率Pl計算公式為:
(1)
式中:Vs和Vl為源電壓和負載電壓Zs=Rs+jXs;和Zl=Rl+jXl為源阻抗和負載阻抗。阻抗正配原理見圖1。
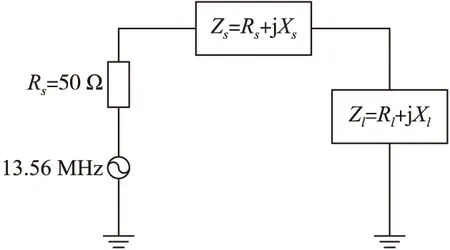
圖1 阻抗匹配原理框圖
在這種情況下,Pr=0,傳輸效率最高。匹配電容C與負載功率Pl的關(guān)系為:
Pl=h(C)
(2)
式中:h(C)即為ESC的性能指標函數(shù)[14]。
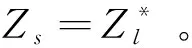
由于在實際系統(tǒng)中存在各種外界的未知干擾,同時,在特定放電條件下,Pl為關(guān)于匹配電容的單峰極值函數(shù)。因此,一種不依賴精確模型描述的無模型控制器ESC非常適合應用于阻抗匹配控制。ESC控制下的阻抗匹配控制原理見圖2。
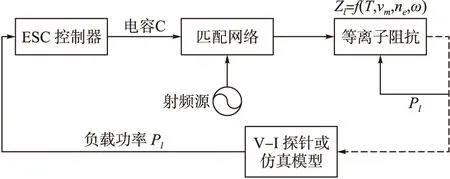
圖2 阻抗匹配控制原理
2 快速終端滑模極值搜索
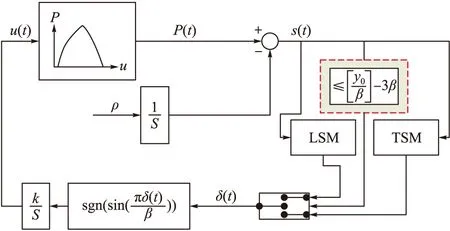
阻抗匹配控制為確定匹配網(wǎng)絡可調(diào)元件值,將射頻功率傳輸?shù)阶畲蠊β庶c,由第1節(jié)分析可知,負載功率Pl為極值函數(shù),以L型匹配網(wǎng)絡的并聯(lián)電容值為控制輸入u,負載功率為系統(tǒng)的輸出y。滑模極值搜索算法的控制結(jié)構(gòu)如圖3所示。
圖3中,k、β、ρ為控制參數(shù)。系統(tǒng)的滑動變量δ(t)為:
圖3 滑模極值搜索控制結(jié)構(gòu)
δ(t)=P(t)-g(t)
(3)
式中:g(t)=ρt。對滑動變量δ(t)進行求導可以得到:
(4)
式中:φ(u)為輸出有功功率;H(u)對輸入可變電容u的偏導數(shù);sgn()為符號函數(shù)。
輸入?yún)?shù)u定義為:
(5)
2.1 滑模極值搜索
由SM-ESC的原理可知,極值搜索過程分為3個階段。
1)收斂階段,從系統(tǒng)初值收斂到滑模態(tài);
2)滑動階段,在滑模面上做滑模運動,收斂至極值點;
3)穩(wěn)態(tài)振蕩階段,脫離滑模面在極值點附近穩(wěn)態(tài)震蕩;
進入穩(wěn)態(tài)振蕩時|φ(u)|<ρ/k,滑模態(tài)消失。
(6)
1)ρ/k較小時,當系統(tǒng)進入滑模面δ(t)=(2n-1)β之前,會穿越區(qū)域|φ(u)|≤ρ/k,并再次進入|φ(u)|>ρ/k區(qū)域,達到收斂條件。在滑模面δ(t)=(2n-1)β上運動并向|φ(u)|≤ρ/k收斂。進入?yún)^(qū)域|φ(u)|≤ρ/k前同樣會得到:
(7)
滑模信號δ的變化情況如圖4所示。系統(tǒng)首先從初始狀態(tài)收斂到滑模面,然后在滑模面上做滑模運動,在脫離滑模面后δ逐漸減小,并經(jīng)過不同的滑模面,形成穩(wěn)態(tài)振蕩。
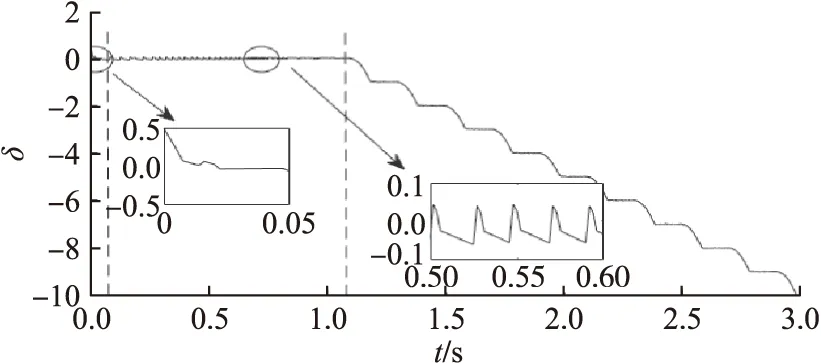
圖4 滑模信號δ變化曲線
由SM-ESC原理可知,在收斂階段,需要較大的k和較小的β使系統(tǒng)盡快達到滑模面。在滑動段需要較快的收斂速度,需要較大的ρ,由式(6)可得滑動段的滑動范圍于與ρ/k相關(guān),在穩(wěn)態(tài)振蕩階段,振蕩幅值kβ/ρ正相關(guān)。
2.2 切換無穩(wěn)態(tài)振蕩極值搜索
基于2.1節(jié)中分析結(jié)果,在收斂的第3個階段系統(tǒng)存在穩(wěn)態(tài)振蕩且與前兩個階段的參數(shù)相互影響,提高系統(tǒng)的快速性就會增大穩(wěn)態(tài)振蕩,減小穩(wěn)態(tài)振蕩就會使系統(tǒng)搜索速度減小。這種特點限制了滑模極值搜索算法的應用。在本節(jié)提出了一種基于切換的SM-ESC方法,利用設定的切換函數(shù)在穩(wěn)態(tài)階段加入終端滑模面,在不同搜索階段自適應改變滑動參數(shù)的變化率,在保證快速收斂同時減小穩(wěn)態(tài)振蕩幅值,克服基于傳統(tǒng)SM-ESC的缺點。
2.2.1 終端滑模控制
線性滑模(LSM)與終端滑模(terminal slid mode,TSM)的關(guān)系表達式為:
(8)
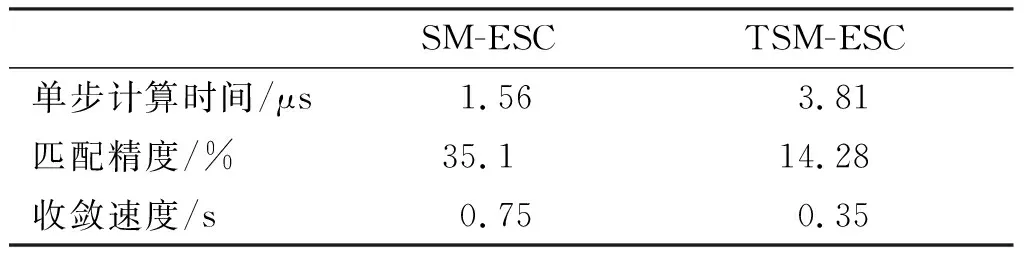
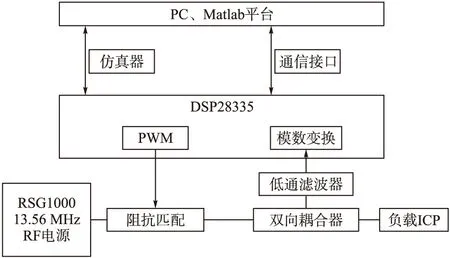
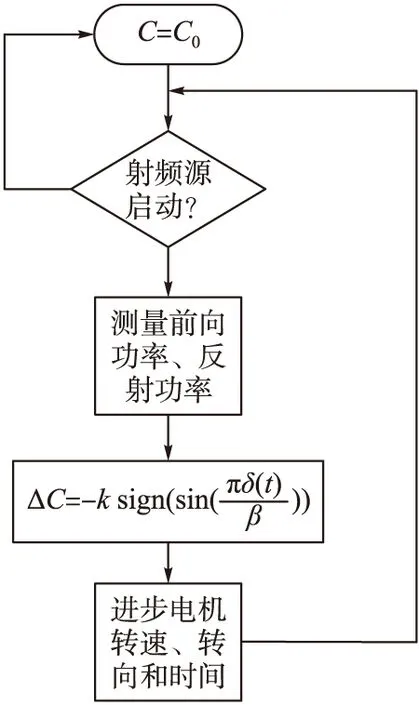
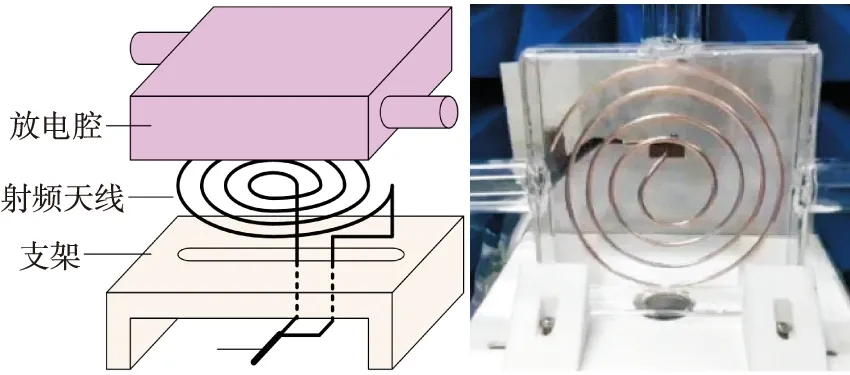
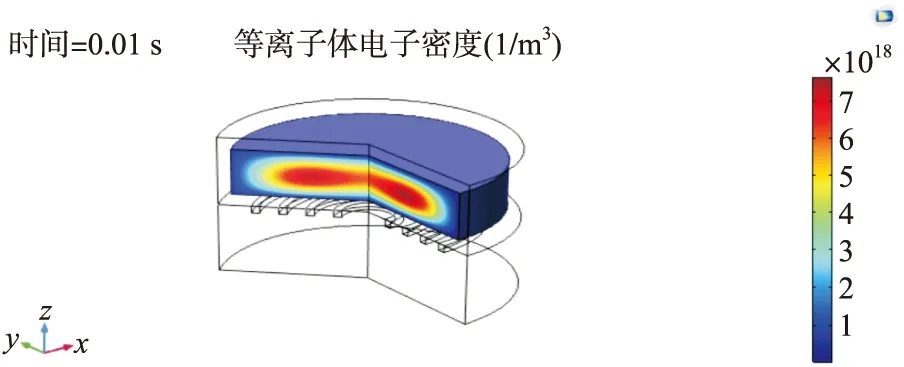
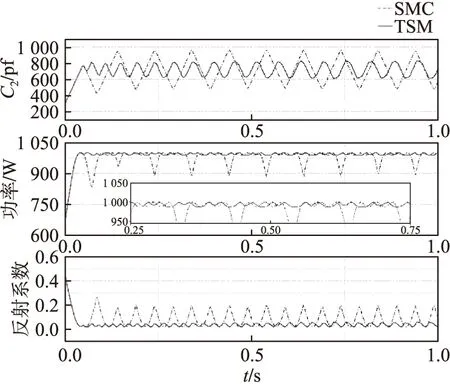
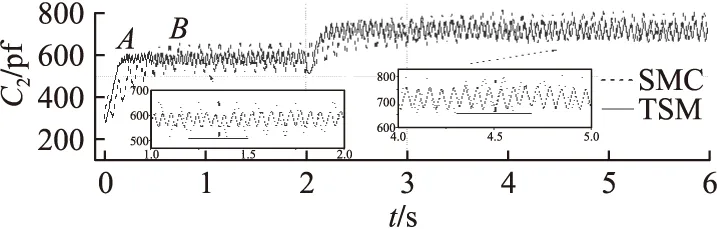
式中:s∈R為系統(tǒng)狀態(tài);1/2 終端滑模面的設計解決了系統(tǒng)不能在有限時間內(nèi)收斂到零的問題。其通過加入非線性部分,提高了向平衡狀態(tài)靠近時的速度,且由于1/2 圖5 不同滑模面系統(tǒng)狀態(tài)和收斂速度 由圖5可得,當s>1時,LSM的收斂速度快;當s<1時,TSM的收斂速度快。 由2.1節(jié)可知系統(tǒng)進入穩(wěn)態(tài)階段后,以極值點左側(cè)為例,(2n-1)β 由滑模收斂過程的分析可以得出對任意初始值P0,都會收斂于滑模面s=[y0/β]和s=[y0/β] ±β,且當滑模狀態(tài)從二階段進入三階段后,s發(fā)生了明顯變化。因此,可以利用信號s(t)來區(qū)分基于滑動模式的ESC的收斂階段。 選擇在滑模過程結(jié)束時為切換時刻,[y0/β] ±3β作為切換閾值。系統(tǒng)切換控制律設計為: (9) 式中:[·]表示·的取整函數(shù)。 式(9)決定了滑模收斂過程中的切換時刻,在γ為0時,滑模極值搜索工作完成滑模搜索的第1、2階段,當γ為1時,進入無穩(wěn)態(tài)振蕩的終端滑模控制過程。基于切換的終端滑模極值搜索控制結(jié)構(gòu)見圖6。 圖6 切換滑模極值搜索控制結(jié)構(gòu) 2.2.2 穩(wěn)定性分析 由2.2.1節(jié),通過對s/β取余數(shù)可以將穩(wěn)態(tài)振蕩環(huán)節(jié)的每一階段轉(zhuǎn)化到(0,1)之間。由圖5所示的系統(tǒng)相圖可知,在系統(tǒng)變量處于(0,1)之間時終端滑模面的收斂速度最快。 (10) (11) 在Intel(R) Core(TM) i7-4690 CUP、主頻3.6 GHz、8 GB內(nèi)存的臺式機上對快速終端滑模極值搜索控制算法和傳統(tǒng)SM-ESC算法進行相同工況的阻抗匹配仿真計算,計算效率結(jié)果見表1。 表1 不同算法計算效率 通過對比,TSM控制相對于傳統(tǒng)SM-ESC算法增加了一定的計算復雜性,但有效提高了對于匹配電容值搜索算法的收斂速度同時降低了系統(tǒng)的穩(wěn)態(tài)振蕩提高收斂精度。 阻抗匹配控制系統(tǒng)硬件平臺由個人PC、驅(qū)動電路、電機控制器,射頻電源組成如圖7所示。利用個人PC上的MATLAB/Simulink平臺搭建整個控制系統(tǒng)模型。計算機通過仿真器與DSP連接,模型執(zhí)行文件通過JTAG鏈接下載到DSP中。射頻功率由匹配器轉(zhuǎn)移到負載ICP中。由雙向耦合器采集到的前向功率與反射功率,經(jīng)低通濾波器模數(shù)變換輸入到DSP控制器中,完成系統(tǒng)輸入并執(zhí)行所有的控制,如模擬信號采樣,無刷直流電機電子換向,PWM產(chǎn)生和SMC算法等。DSP輸出的控制信號經(jīng)驅(qū)動電路與步進電機連接控制匹配電容。 圖7 控制系統(tǒng)模型 圖8顯示了控制器的簡要流程圖。啟動射頻源,通過雙向耦合器測量負載端與匹配器的前向功率Pr和反射功率Pf。基于前向功率Pr的測量值,根據(jù)式(12)改變匹配電容C。進一步根據(jù)電機位置與電容的關(guān)系改變步進電機的轉(zhuǎn)速和轉(zhuǎn)向。經(jīng)過反復迭代,匹配電容和前向功率Pr向目標最大功率點位置變化,并在極值點附近做振蕩。 圖8 控制器流程圖 (12) 以L型阻抗匹配網(wǎng)絡為例,仿真了電感耦合等離子體的阻抗匹配過程。仿真原型為平面螺旋型的線圈射頻天線,如圖9所示。 圖9 腔體與放電線圈 系統(tǒng)的幾何特征如下:放電線圈采用1 mm銅線繞制而成,線圈共繞4圈,每圈間距9 mm。射頻電源頻率為13.56 MHz,電源內(nèi)阻50 Ω。RF功率為1 000 W。本文通過COMSOL Multiphysics軟件對透波腔的阻抗模型進行計算。仿真模型如圖10所示。 圖10 等離子體的腔室COMSOL仿真模型 經(jīng)過仿真與實驗驗證,在T=300 K,P=30 Pa條件下等離子阻抗為Z=4.829+67.711j,由史密斯圓圖可得該條件下的網(wǎng)絡匹配電路值為C1=221.7 pf,C2=718 pf。選擇控制參數(shù)ρ=20,k=10 000,β=1。系統(tǒng)初值為u0=300。對本文所提算法與SM-ESC的仿真結(jié)果對比如圖11所示。 圖11 TSM與SMC仿真對比 為了更好地說明本文所提算法的性能,圖中不僅給出了輸入匹配電容C2的變化情況,同時給出了反射系數(shù)和輸出負載端有功功率的變化圖。由圖中局部放大圖可知在收斂速度相同的情況下,傳統(tǒng)滑模方法負載端有功功率穩(wěn)態(tài)振蕩約為100 W,而所提出的滑模極值搜索控制方法的穩(wěn)態(tài)振蕩很小。 由于在實際放電過程中,(E-H)模式跳變以及放電條件的變化對激勵器負載特性有較大影響。為進一步分析系統(tǒng)的動態(tài)收斂性能,證明該方法在保持較快收斂速度的同時減小系統(tǒng)穩(wěn)態(tài)振蕩。本文考慮了負載突變對系統(tǒng)控制效果的影響,對傳統(tǒng)SMC在兼顧收斂速度和穩(wěn)態(tài)振蕩的情況下。經(jīng)過實驗,選擇最優(yōu)控制參數(shù)ρ=15,k=2 000,β=1。同時對TSM選擇控制參數(shù)ρ=20,k=3 000,β=1。系統(tǒng)初值均為u0=300,且在2 s將射頻功率由750 W變?yōu)? 000 W,匹配網(wǎng)絡匹配電容C2的動態(tài)響應如圖12。 圖12 C2的動態(tài)響應 圖12給出了在2 s時刻,輸入功率變化時,匹配電容C2的變化。從圖13中可以看出,TSM控制方法可以快速的在0.1 s內(nèi)(如圖A點)找到系統(tǒng)匹配電容值672 pf,得到射頻源的最大功率輸出點,而SMC則需要1 s(如圖B點)才可以收斂。在2 s時刻由于輸入功率變化,負載阻抗發(fā)生變化,系統(tǒng)同樣在較短時間內(nèi)找到1 000 W下的匹配電容值718 pf,同時,從局部放大圖可知系統(tǒng)的穩(wěn)態(tài)振蕩也得到了改善。通過在穩(wěn)態(tài)條件下測量不同功率下負載阻抗,由史密斯圓圖可知匹配電容值較為準確性。 在射頻放電中,由于功率變化,線圈會從E模式跳變至H模式,導致激勵器阻抗變化范圍較大,而自動匹配器所匹配的電容不僅匹配所需時間長,且在變化范圍較大時需要手動調(diào)節(jié),不能滿足匹配要求。因此本文將所提算法引入到自動匹配器的匹配電容計算中,通過測得的反射功率自動尋優(yōu)當前條件下的匹配電容,并調(diào)節(jié)電容C2。實驗中對平面螺旋型感應耦合等離子體激勵器進行放電實驗,負載在不同功率下放電圖像如圖13所示。 圖13 放電圖像 圖13中,(a)為放電開始時,(b)為100 W時E-H模式轉(zhuǎn)變放電圖,(c)為使用雙可變電容匹配時由自動匹配器匹配750 W放電圖,(d)為使用SMC調(diào)節(jié)匹配器的匹配電容時750 W放電圖,(e)為使用TSM調(diào)節(jié)匹配器的匹配電容時750 W放電圖。通過觀察750 W時射頻源顯示的反射功率值,雙電容自動匹配器不僅需要提前手動調(diào)節(jié)且匹配時間較長,反射功率維持在67 W左右,使用單電容SMC算法反射功率維持在65 W左右匹配時間縮短,而使用單電容TSM優(yōu)化算法可以將反射功率調(diào)至50 W左右。從實驗結(jié)果來看該算法對于反射功率的降低起到了一定的效果。 另外分析放電后的圖像形狀,實驗結(jié)果與文獻[18]結(jié)論相同:外電路阻抗會影響放電區(qū)域電子密度分布。從圖可知,TSM優(yōu)化后放電更加均勻,線圈中部的耦合效果更佳,發(fā)光更亮。對于透波腔的電磁散射效果更優(yōu)。綜上,TSM方法可有效提高收斂速度減小電路功率損耗,同時在保證速度的情況下對系統(tǒng)穩(wěn)態(tài)振蕩的消除較為明顯。 本文以透波腔ICP為研究對象,設計了一種改進滑模極值搜索的阻抗匹配控制方法。通過仿真和實驗驗證了該新型控制方法的有效性。得出了如下結(jié)果: 1)為提高ICP射頻源阻抗匹配網(wǎng)絡的匹配速度和匹配精度,本文提出了一種SMESC與終端滑模相結(jié)合的控制策略。 2)理論分析表明,本文控制策略可以保證系統(tǒng)在減小SMESC在穩(wěn)態(tài)階段振蕩同時提高收斂環(huán)節(jié)速度。 3)仿真和實驗結(jié)果表明,相比于SMESC控制,本文所提出的控制策略TSM在保證收斂速度的同時提高了匹配精度,進而減小電路功率損耗,提高電源效率,并且改善了透波腔的密度分布。因此,TSM對于減小功率損耗,能在保證快速達到匹配阻抗的同時抑制穩(wěn)態(tài)階段振蕩,并且改善了透波腔的電子密度分布。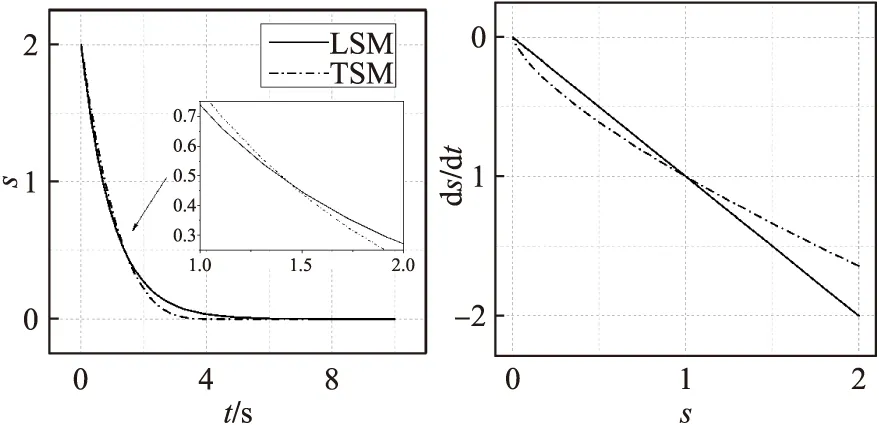


3 實驗驗證

4 結(jié)論
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34鐵道通信信號(2018年5期)2018-06-28 03:06:24家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
