綠葉菜耕整作畦機的研制與試驗
2021-05-29 13:51:14周春健黃嘉俊成松松唐寧靜陳春勝
農業開發與裝備 2021年4期
周春健,黃嘉俊,成松松,唐寧靜,陳春勝
(上海市農業機械研究所,上海市 201106)
0 引言
綠葉菜是上海地區產量較大的蔬菜品種,目前上海綠葉蔬菜周年播種面積達5.72萬hm2,2017年綠葉菜產量148.9萬t達到上海全年蔬菜總產量的47.9%[1]。由于綠葉菜耕種收各個環節機具匹配性較差,綠葉菜生產全程機械化率較低,機具的不配套制約了綠葉菜產業的發展[2-3]。作畦是綠葉菜全程機械化生產的關鍵環節,畦面質量的好壞影響后續的機械化播種及收獲環節[4-5]。上海地區常用的綠葉菜作畦機主要有無錫悅田YTLM系列[6]、韓國璟田作畦機等,此類機型采用成型板完成作畦作業,畦面土質較松軟,待綠葉菜成熟收獲時,畦面高低不平,不利于后續機械化采收。為解決綠葉菜種植作畦的問題,國內許多學者對作畦機進行了研究。張浪[7]等研制了1LZ-140蔬菜聯合精整地機具,可一次完成旋耕、碎土、平整、起壟及鎮壓作業,特別是碎土輥設計,能滿足不同土壤特性的蔬菜整地作業;管春松[8]等研制的蔬菜作畦機可一次完成深層土壤旋耕、表層土壤精整、起畦和畦面鎮壓等多項工序,試驗結果表明不同的機具前進速度和動力輸出軸轉速對作畦效果影響顯著。針對上海地區綠葉菜地土壤情況、種植模式以及綠葉菜生產全程機械化考核指標要求,本文設計一種適合上海地區綠葉菜種植的蔬菜耕整作畦機,可一次完成取土、旋耕、碎土、作畦、鎮壓作業,為上海綠葉菜生產全程機械化提供配套機具。
1 整機結構及工作原理
1.1 整機結構
綠葉菜耕整作畦機整機主要有取土部件、機架、傳動及旋耕刀軸部件、碎土輥部件、限深輪部件、作畦輥部件組成。整機結構如圖1所示。
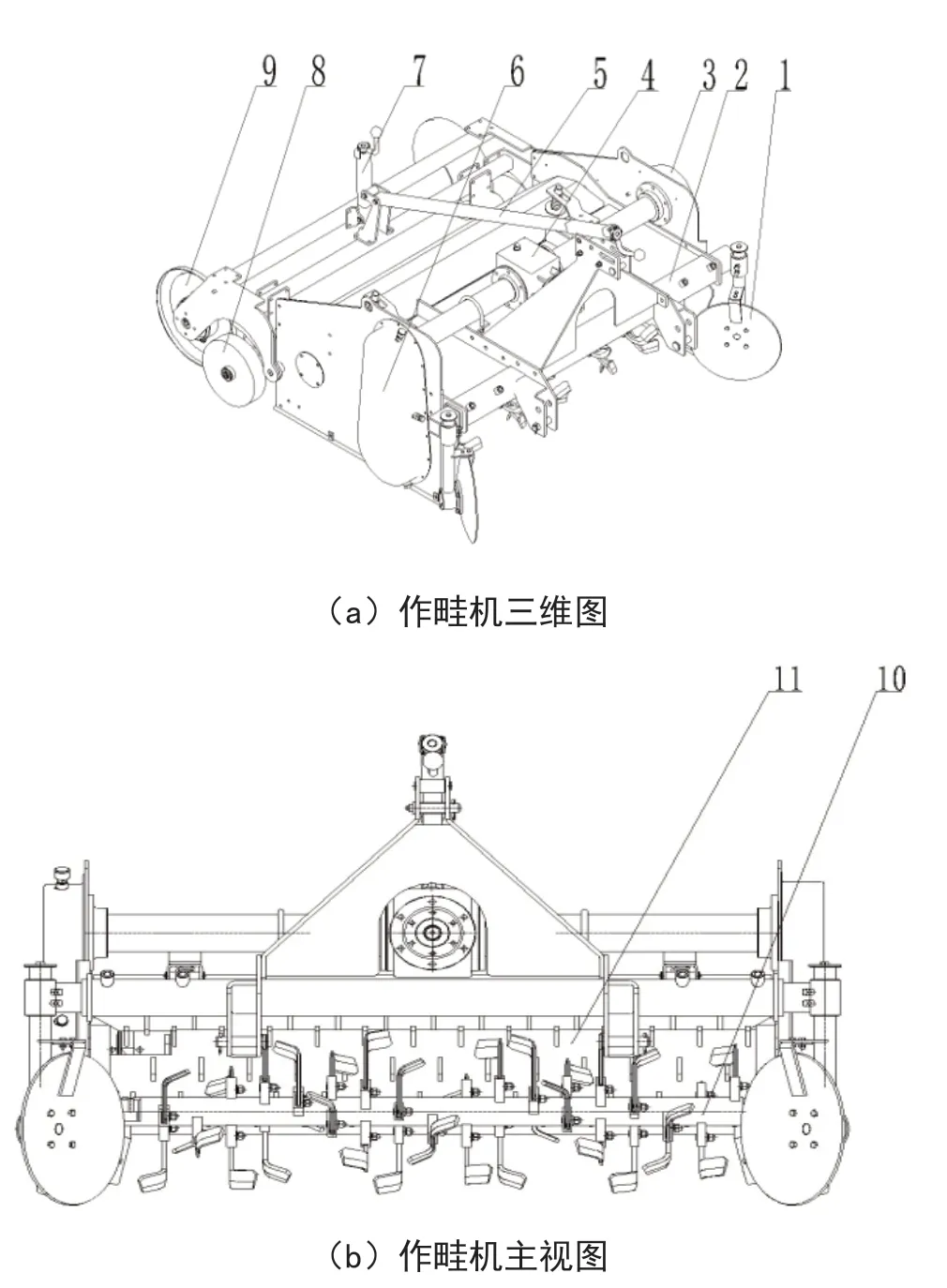
圖1 作畦機整機結構簡圖
1.2 工作原理
綠葉菜耕整作畦機采用三點懸掛方式與拖拉機連接,作畦機作業由拖拉機驅動。作畦機作業過程中,由取土圓盤將土聚攏,拖拉機PTO通過萬向節將動力傳至旋耕刀軸和碎土輥完成碎土作業,最后由作畦輥部件完成畦面成型、鎮壓作業。根據綠葉菜種植不同畦面寬度和高度要求,可通過改變取土圓盤角度和高度、限深輪高度以及作畦輥高度,調整取土量以滿足不同畦面作業要求,完成耕整作畦。綠葉菜耕整作畦機主要技術參數如表1所示。

表1 主要技術參數
2 關鍵部件設計
2.1 取土部件設計
取土部件是綠葉菜耕整作畦機調整取土量的關鍵部件,取土部件主要由取土圓盤、支架以及刮土板組成,取土圓盤直徑410 mm,采用65錳鋼制作。取土部件,如圖2所示。
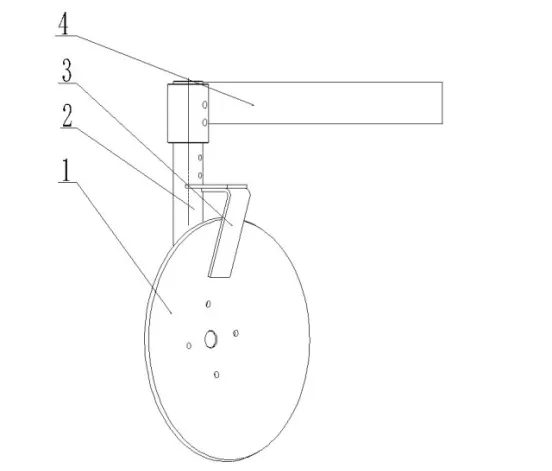
圖2 取土部件
取土圓盤支架與機架通過兩個緊固螺栓連接,作畦機作業前通過放松緊固螺栓調整取土圓盤的位置以滿足作業取土量的要求。作業過程中,取土圓盤在拖拉機前進時自動旋轉并向中間取土,初步形成畦面和壟溝,刮土板可及時將粘在取土圓盤上的土壤刮除,保證取土圓盤正常作業。
2.2 傳動、旋耕刀軸及碎土輥設計
作畦機旋耕碎土動力由拖拉機PTO輸出,通過萬向節、中間齒箱、傳動軸、旋耕刀軸鏈條箱,碎土輥鏈條箱將動力分別傳至旋耕刀軸及碎土輥,驅動旋耕刀軸和碎土輥碎土作業,旋耕碎土傳動部件如圖3所示。
拖拉機動力輸出軸轉速為540 rpm,圖3中Z1、Z2、Z7為錐齒輪,齒數分別為15、24、24,Z3、Z4、Z5、Z6為鏈輪,齒數分別為15、22、16、14,經計算旋耕刀軸轉速為230 rpm,碎土輥轉速295 rpm符合旋耕碎土作業要求。
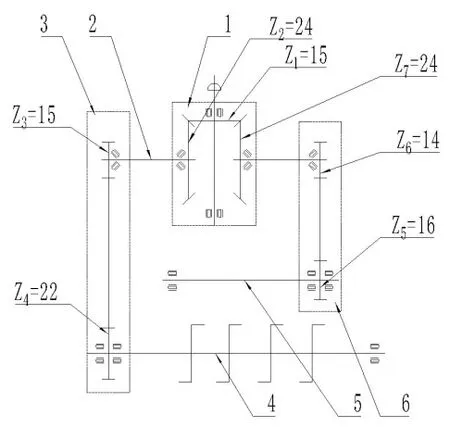
圖3 旋耕碎土傳動部件
2.2.1 旋耕刀軸設計
作畦機作業質量與旋耕碎土的效果正相關,切土節距與旋耕速比是影響旋耕碎土效果的關鍵因素。根據旋耕作業相關公式計算機具旋耕速比[9]。

式中,ω為旋耕刀軸角速度取24 rad/s;
R為旋耕刀回轉半徑取0.21 m;
V為機具前進速度取1 m/s;
λ為旋耕速比。
由式1計算得出λ=5。
綠葉菜地含水量普遍較高且殘茬較多,為保證旋耕碎土性能,選擇切土節距為90 mm[10],由切土節距公式計算得出單位刀軸圓周上的刀片數量。

式中,S為切土節距,取0.09 m;
R為旋耕刀回轉半徑,取0.21 m;
λ為旋耕速比,取5;
Z為單位刀軸圓周上的刀片數量。
由式2計算得出Z=3。
通過對旋耕刀軸轉速、旋耕速比、切土節距、單位刀軸圓周上的刀片數量的設計計算,得出綠葉菜耕整作畦機旋耕作業部件設計的參數較合理。
2.2.2 碎土輥設計
碎土輥是對旋耕后的土壤進行二次粉碎的主要部件,主要有滾筒和刀齒組成,如圖4所示。刀齒共有7排均布于滾筒圓周上,相鄰兩排刀齒軸向錯位,相鄰刀齒間距97 mm。通過碎土輥對旋耕后的土壤二次碎土后,表層土壤更加細碎,利于機具作畦作業。
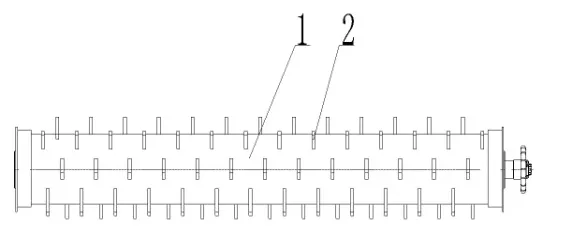
圖4 碎土輥
2.3 限深輪部件設計
限深輪部件是調整畦面高度,控制畦面成型土量的關鍵部件,主要有地輪、地輪支架、橫梁、地輪調節臂組成,如圖5所示。作畦機作業前,通過調節地輪調節臂的長度將限深輪高度調整至合適位置控制畦面成型土量以滿足畦面土量要求。

圖5 限深輪部件
2.4 作畦輥部件設計
作畦輥是作畦機畦面成型的關鍵部件,通過將旋耕過的土壤進行成型、鎮壓完成作畦作業。作畦輥部件主要有作畦輪軸、作畦輪側板、作畦輪支臂、液壓馬達組成,如圖6所示。
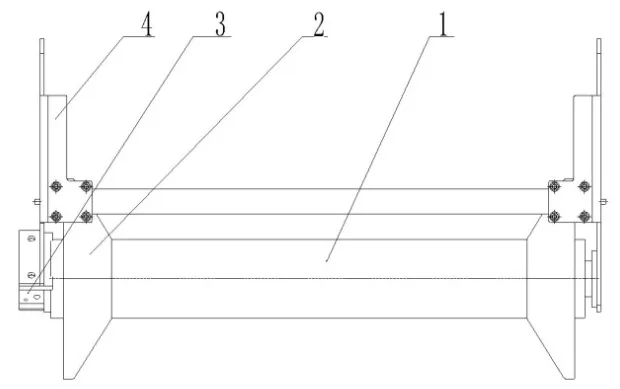
圖6 作畦輥部件
液壓馬達與作畦輪支臂通過螺栓連接,液壓馬達動力輸出軸與作畦輪軸相連,作畦輪側板通過螺栓固定于作畦輪外圓。作畦機作業過程中可按照綠葉菜種植畦面要求,調整作畦輪側板位置,調整畦面寬度。液壓馬達動力由拖拉機液壓后輸出提供,管路中裝有流量調節閥,通過流量調節閥可調節液壓油流量控制作畦輪軸轉速以滿足畦面作業要求。
3 機具田間試驗
3.1 機具試驗條件
太倉與上海毗鄰,土壤情況與綠葉菜種植模式和上海相近,課題組選取太倉鹿楊蔬果生產專業合作社作為試驗基地。2020年12月在鹿楊合作社進行了綠葉菜耕整作畦機試驗。試驗蔬菜田長120 m,寬60 m,土壤0~5 cm濕度16.5%,試驗動力為久保田704拖拉機,拖拉機慢二檔作業,作畦機田間試驗如圖7所示。

圖7 田間試驗
3.2 試驗依據
根據GB/T 5668-2017旋耕機械、JB/T8401.2-2017旋耕聯合作業機械的試驗方法,對畦面高度穩定性及合格率、畦面寬度穩定性及合格率進行測試。
3.2.1 畦面高度穩定性及合格率
作畦完成后,隨機選取3個行程,用鐵皮尺測定畦面高度。測定時,沿機組前進方向每隔2 m測定一點,每個行程各測定5點,記錄數據,計算平均值、穩定性系數及合格率。綠葉菜種植畦面農藝要求高度15 cm,畦面高度12~18 cm為合格,合格畦面高度數量占總測定畦面高度數量的百分比為合格率。
3.2.2 畦面寬度穩定性及合格率
畦面寬度及穩定性及合格率測定方法同畦面高度穩定性及合格率測定方法。綠葉菜種植畦面農藝要求寬度120 cm,畦面寬度117~123 cm為合格。
3.3 試驗結果
3.3.1 畦面高度穩定性及合格率
作畦試驗后,根據試驗方法將試驗數據記入表2。從表2的數據得出作畦機畦面高度穩定性系數94%,合格率100%,符合GB/T 5668-2017旋耕機械、JB/T 8401.2-2017旋耕聯合作業機械的標準。
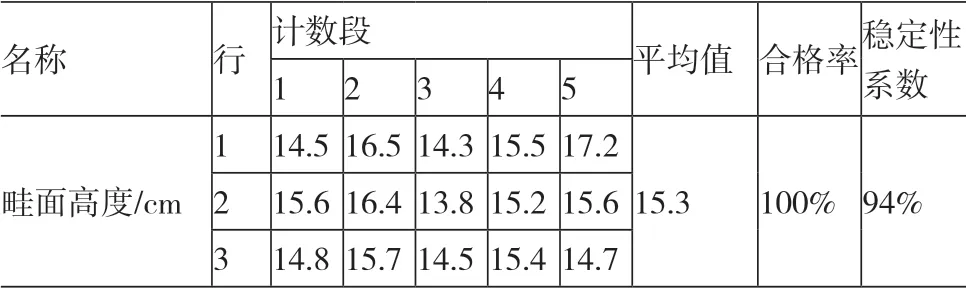
表2 畦面高度
3.3.2 畦面寬度穩定性及合格率
作畦試驗后,根據試驗方法將試驗數據記入表3。從表3的數據得出作畦機畦面寬度穩定性系數99%,合格率100%,符合GB/T 5668-2017旋耕機械、JB/T 8401.2-2017旋耕聯合作業機械的標準。
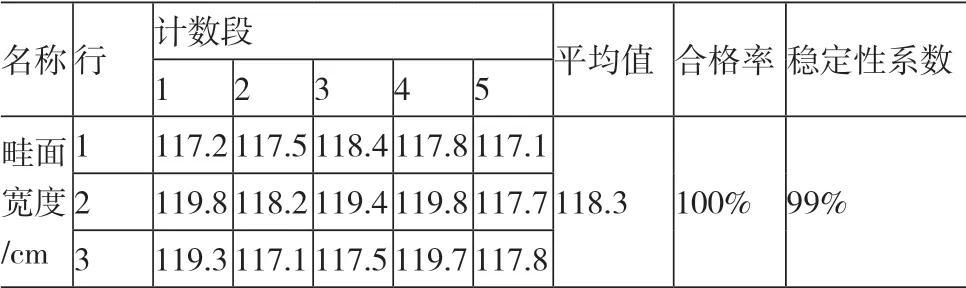
表3 畦面寬度
4 結語
根據綠葉菜種植農藝要求,設計一種取土、旋耕、碎土、作畦、鎮壓為一體的綠葉菜耕整作畦機。通過調節取土圓盤位置及限深輪高度,使取土量符合畦面成型土量要求,同時拖拉機前進速度與旋耕刀軸轉速匹配,旋耕碎土性能較好,表層土壤通過碎土輥二次粉碎,表層土壤更加細碎,碎土通過作畦輥作業完成畦面成型,畦面緊實度適合綠葉菜機械化播種和收獲作業。田間試驗表明該機平均畦面高度15.3 cm,平均畦面寬度118.3 cm,畦面高度穩定性系數94%,合格率100%,畦面寬度穩定性系數99%,合格率100%,畦面質量符合上海綠葉菜生產全程機械化要求。機具作業過程中,未發生土壤擁堵、菜茬纏繞旋耕刀軸現象,機具通過性能良好。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
現代畜牧科技(2021年9期)2021-10-13 06:38:48
裝備制造技術(2021年1期)2021-05-21 07:55:24
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
現代工業經濟和信息化(2016年6期)2016-05-17 05:36:13
中國衛生質量管理(2015年2期)2015-12-01 05:43:57
現代企業(2015年8期)2015-02-28 18:55:23
質量探索(2015年3期)2015-01-30 09:02:36
