基于電磁感應的磁浮列車絕對定位系統設計
2021-06-01 06:39:14譚冠華王堅強易立富王梓丞
鐵道通信信號 2021年5期
譚冠華 王堅強 易立富 王梓丞
在軌道交通領域中,磁浮列車因其牽引制動原理、軌道結構等與輪軌列車存在較大的差異,因此其采用的列車定位技術也有所不同。其中,為實現磁浮列車高效、準確的列車自動運行、自動防護、精確停車等功能,對列車定位精度提出了更高的要求,通常會采用一種列車絕對定位技術,來消除列車運行過程中產生的累積誤差[1]。
目前僅有部分絕對定位技術得到了應用,其他技術只是用于理論分析或試驗線測試。基于查詢應答器的絕對定位技術[2]具有較高的可靠性和精確度,在中低速磁浮中得到了應用,但由于采用了電磁激活后再獲取數據的方式,其適應速度上限受到約束,并不適用于高速磁浮;基于交叉感應環線的列車定位技術[3-4],既是一種相對定位技術,也是一種絕對定位技術,從絕對定位的角度出發,若全線覆蓋,則增加了大量軌旁設備,同時安裝空間受到限制;基于標志板的列車定位技術[5-6],在上海磁浮線得到應用證明,根據原理分析,其定位的準確性會受到列車振動的干擾,可能導致車載線圈編碼識別錯誤;基于地址編碼板的列車定位技術[7],采用凹槽或者金屬與非金屬鑲嵌的方式實現地址編碼,根據車載感應線圈讀取到強度不同的感應信號來識別地址,從而獲取列車位置,該方法在國防科技大學磁浮試驗線進行了理論測試,但其適用速度與抗干擾能力有待驗證。本文在總結既有絕對定位技術經驗的基礎上,提出了一種基于電磁感應的磁浮列車絕對定位系統。
1 列車絕對定位基本原理
列車絕對定位系統由地面設備與車載設備2部分構成,基本工作原理是:當列車通過軌旁磁場產生設備時,車載設備感應線圈的磁通量發生變化,電磁感應產生了感應電流,車載設備通過感應電流的強度、方向識別出地址編碼數據,從而獲取列車的絕對位置信息。
通過在多個間隔布置的線圈中通以不同方向的電流,使得線圈變成“N”“S”極性不同的電磁鐵,從而進行二進制編碼,形成軌旁磁場產生設備的編碼信息。列車絕對定位編碼基本原理見圖1。以“S”極向下為“0”,“N”極向下為“1”,圖1可表示“1010”編碼。
車載讀取設備讀取軌旁磁場產生設備的編碼信息,首先是通過一個無源的感應線圈,如圖2所示,依次經過編碼線圈的位置1、2、3、4,隨著列車運行,通過感應線圈的磁通量將發生變化,且不同“N”“S”極編碼線圈的磁場方向不同,感應線圈會生成方向相反的感應電流,車載讀取設備對感應電流經過濾波、整流等信息處理后,以正電流為“1”,負電流為“0”進行解析,就轉換為“1010”編碼。
2 列車絕對定位系統結構及功能

圖2 列車絕對定位讀碼原理圖
列車絕對定位系統中,軌旁磁場產生設備主要包括電源模塊、編碼控制模塊和多線圈組合模塊;車載讀取設備主要包括感應線圈、互感電流環、濾波器、整流器、信息處理單元和線路數據模塊。列車絕對定位系統結構見圖3。
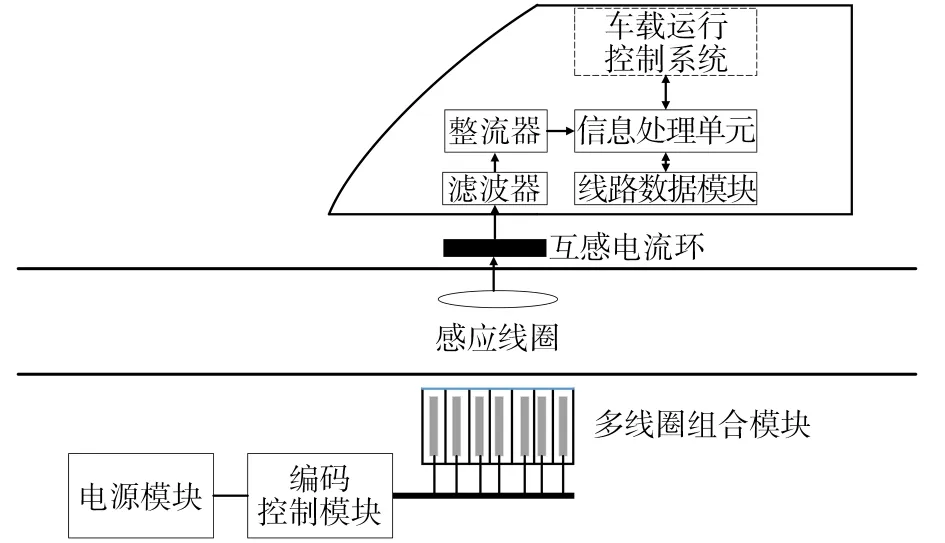
圖3 列車絕對定位系統結構
1)電源模塊作為軌旁設備的供電單元,既負責與外部供電設備的連接,輸出穩定電流;也作為儲能設備,當外接電源斷電后,繼續保持一段時間的穩定工作。
2)編碼控制模塊作為軌旁設備的核心處理單元,具有多組接口端子,每組接口端子與一個線圈連接,依據設定的地址編碼(其地址編碼與線路位置一一對應),控制每組接口端子的供電電流方向。
3)多線圈組合模塊由多個螺旋線圈和固定卡槽構成。當通過電流時,產生不同極性的電磁場,是地址編碼的具體表現形式。根據列車絕對定位基本原理可知,該模塊是列車位置信息的表示模塊。
4)感應線圈是一個無源多匝線圈,通過線圈的磁通量變化產生感應電流,是列車位置信息的直接接收單元。
5)互感電流環采用無接觸方式與感應線圈連接,通過互感現象,間接反饋出電流強度,并將電流傳遞給濾波器。
6)濾波器主要負責將接收到的電流信息進行降噪和平滑處理,避免因列車振動、線路環境中的磁場信號干擾列車地址編碼的識別。
7)整流器負責將經濾波器降噪、平滑處理后的電流信號轉化為方波信號,更利于信息處理單元進行解碼。
8)信息處理單元是車載讀取設備的核心處理器,負責將整流器輸出的方波信號解析為編碼信息,并根據編碼信息,先識別列車運行方向,確定列車具體的地址編碼;再通過線路數據模塊存儲的地址編碼與位置的映射關系,獲取列車具體位置;最后,根據之前獲取的列車位置信息,校驗該列車位置信息是否正確,正確則反饋給列車運行控制系統,錯誤則進行報警提示與日志存儲。
9)線路數據模塊是系統數據存儲單元,負責存儲整條線路所有的地址編碼與實際位置的映射關系。
上述所有設備都采用模塊化設計結構,方便系統維護以及故障處理。
3 列車絕對定位系統特殊設計
3.1 列車運行方向的識別
針對單線雙向運行線路或折返軌,磁浮列車通過同一個軌旁磁場產生設備時,可能是上行方向運行,也可能是下行方向運行。為正確識別地址編碼,需要明確列車的運行方向。在軌道交通領域中,由列車定位系統來進行識別運行方向,再發送給其他系統(例如列車運行控制系統、牽引系統等)進行控制。因此,軌旁磁場產生設備的編碼信息中,不僅要有地址編碼,還要有方向編碼。
設計編碼信息時,可以采用“方向編碼+地址編碼+方向編碼”的方式。其中,地址編碼的編碼位數根據線路長度、設置間隔來詳細設計;方向編碼采用“00”表示上行起始點以及編碼信息讀取起始點,“11”表示下行起始點的方式。如圖4所示,假設一個4位地址編碼為“1101”的軌旁磁場產生設備安裝在線路上,列車以上行和下行方向運行經過該位置,讀取到的編碼信息分別為“00-1101-11”與“11-1011-00”,則車載讀取設備根據前面2位方向編碼信息,可識別出列車的具體運行方向;同時根據方向編碼信息,可知位置編碼信息讀取順序是順向還是逆向,從而獲取到正確的地址編碼。
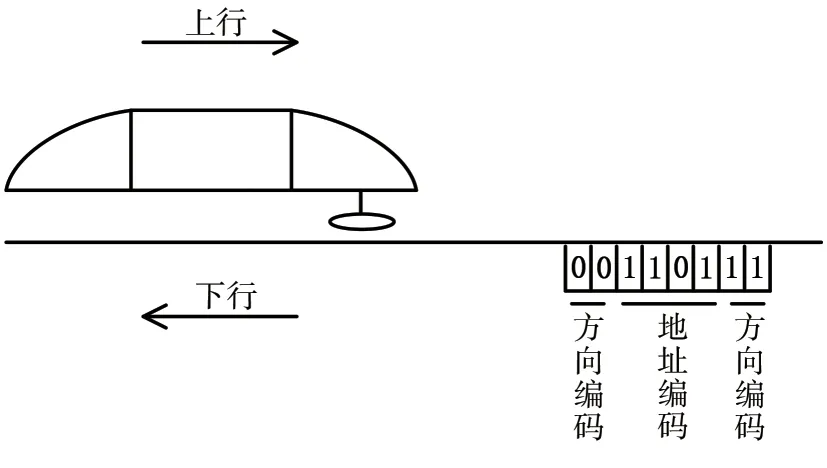
圖4 編碼信息設計示意圖
3.2 抗振結構設計
磁浮列車運行過程中,不可避免地具有橫向、縱向和垂直方向的振動[8],振動會對感應線圈的電流大小產生影響,極大幅度的振動甚至對電流方向產生影響,因此需要設計合理的抗振結構[9],以避免列車運行振動對列車絕對定位系統的準確度造成影響。
本系統中的多線圈組合模塊中的線圈以及感應線圈都采用類似跑道的環線結構,且感應線圈的長度比編碼線圈長度更長。此外,多線圈組合模塊中,各個線圈之間并非緊密連續的,而是彼此間具有較大的間隔,其結構與安裝方向見圖5。該結構設計中,因感應線圈比編碼磁場線圈長度更長,當列車因懸浮氣隙變化產生垂直方向振動時,其感應線圈磁通量不會發生大的變化,保障了感應電流的穩定性;同時由于編碼磁場線圈之間留有較大間隔,給感應電流預留了較大的“0”電流區域,因此即使列車或地面產生沿著列車運行方向的振動,也可確保感應電流包絡的穩定性,經過濾波處理后,可以得到正確編碼的電流信號。而隨列車運行的橫向振動,主要通過感應線圈與多線圈組合模塊之間的安裝間距進行控制,避免物理上的接觸,同時控制和調整軌旁磁場產生設備的電流強度,確保輸出足夠強度的磁場信號。
3.3 抗電磁干擾設計
在磁浮軌道交通中,由于磁浮列車的懸浮、牽引和導向都是由車載及地面上的電磁鐵之間吸引或排斥實現的,因此在磁浮線路上具有復雜的電磁環境,而本文提出的列車絕對定位系統是基于電磁感應原理設計的,因此需要考慮線路上電磁干擾對系統的影響[10]。
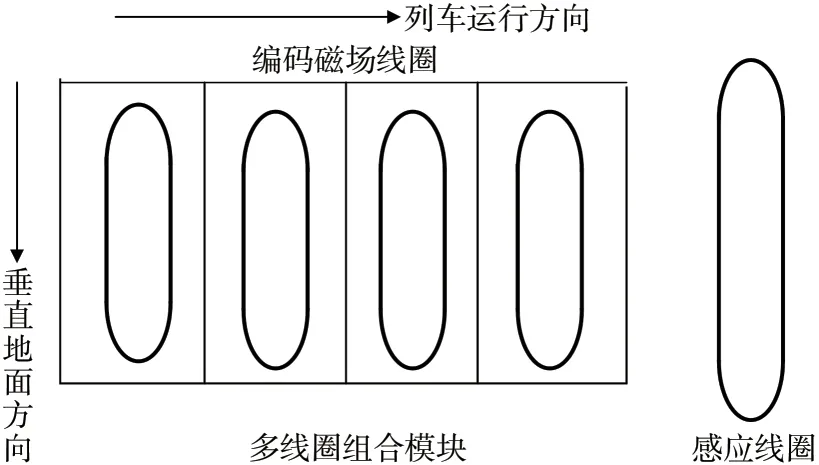
圖5 線圈結構與安裝設計示意圖
本系統中的多線圈組合模塊以及車底的感應線圈都不是直接裸露在環境中,而是通過模具進行隔離防護,起到防水防塵和局部電磁屏蔽的作用。如圖5所示,多線圈組合模塊中各個線圈之間具有隔離板,用于避免線圈與線圈之間的電磁干擾,且整個模塊也進行了封裝。多線圈組合模塊以及感應線圈的模具均采用磁性材料,僅編碼磁場線圈與感應線圈之間正對的一側沒有采用磁性材料,使得感應線圈在讀取編碼的過程中形成了一個類似封閉的電磁屏蔽層[11],基本不受外界磁場干擾。
4 結束語
基于電磁感應的磁浮列車絕對定位系統,在設計過程中充分考慮了列車的實際運行工況和相應的工程環境,對列車方向識別、抗振和抗電磁干擾方面提出了特殊的設計方案。本系統在理論上具有可行性,但受條件限制,暫未在既有線或試驗線進行試驗,還有待驗證其可實施性以及適用的列車速度等級。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代陜西(2022年6期)2022-04-19 12:11:54
計算機應用(2022年2期)2022-03-01 12:33:42
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
工業設計(2016年12期)2016-04-16 02:52:00
Coco薇(2016年1期)2016-01-11 16:53:24