毫米波雷達角度分辨力測試方法研究
2021-06-04 03:39:32武丹丹劉洪偉吳飛燕
汽車電器 2021年5期
武丹丹,劉洪偉,吳飛燕
(中汽研汽車檢驗中心 (天津)有限公司,天津 300300)
車載毫米波雷達作為駕駛輔助的重要環境感知傳感器,其性能、功能的評價方案一直是主機廠關注的重點,且隨著國內毫米波雷達技術的逐步提升,越來越多的評價指標得到公布。如何整理出一套行之有效的毫米波雷達性能、功能測試評價體系,是目前毫米波雷達行業的迫切需求,也是推動國內毫米波雷達產品技術發展,規范智能駕駛汽車環境感知策略的重要手段。
就產品層面,24GHz毫米波雷達技術不管是歐美還是國內,都較為成熟,且國內已將24GHz頻段停用,因此24GHz毫米波雷達的研發及測試需求基本停滯。76~77GHz毫米波雷達性能較24GHz毫米波雷達,穿透性更強,識別距離顯著提升,是目前車載毫米波雷達行業的主流產品,而77~81GHz毫米波雷達更傾向于成像雷達,且目前產品較少,多數處于試驗室開發樣機階段。
在標準層面,ETSI系列標準詳細規定了毫米波雷達測射頻參數要求,但未對毫米波雷達的探測功能及應用場景做出任何規范,國內無線電管理委員會單獨出具了國家推薦性標準,就毫米波雷達工作頻段及雜散限值做出定義,也不涉及毫米波雷達的應用參數。
就測試參數層面,毫米波雷達的目標識別,圍繞著目標物的大小及空間位置進行測試,也就對應著目標的RCS、距離、速度和角度。目標的RCS,即目標的反射截面積,可通過毫米波反射信號的衰減實現參數標定。
基于毫米波雷達功能實現原理,從毫米波的反射時間模擬目標距離,從反射信號的多普勒參數特性層面模擬目標速度,進而實現毫米波雷達距離準確度以及速度準確度的測試,是目前較為成熟且被行業廣泛接受的測試方案。基于上述原理應運而生的毫米波雷達目標模擬器,使得毫米波雷達的測試由實車道路測試轉向了試驗室仿真測試,進而使得毫米波雷達的距離分辨力和速度分辨力的理想場景搭建及測試成為了可能。
目標的角度準確度測試,通過待測雷達的轉動或者目標物的轉動實現毫米波雷達識別目標角度的多場景對比測試,與實際應用情況較為貼切。毫米波雷達角度分辨力,從定義上分析,即在規定條件下,雷達能夠區分目標的最小間隔,進一步可詳細理解為相同RCS、距離、速度的兩目標由同一角度以毫米波雷達為圓心向兩側做圓周運動,直至毫米波雷達將其區分為兩個目標,該最小區分角度即為毫米波雷達的角度分辨力。目標的RCS、距離、速度、角度對毫米波雷達角度分辨力測試的具體影響,目前均不明確,雷達角度分辨力測試涉及因素的復雜多變,使得該項目測試方案的成型面臨較大的挑戰。例如,對于一定角度的兩個目標,目標縱向距離增大,兩目標之間的橫向距離必然增大,通過在雙目標角度固定、縱向距離增大等場景下,對毫米波雷達角度分辨力測試結果進行分析,可直觀確定雷達角度分辨力測試中距離等因素對測試結果的影響,也是形成毫米波雷達角度分辨力測試方案的重中之重,也是推進毫米波雷達測試評價體系成型的重要一環,因此本文通過分析毫米波雷達角度分辨力測試中各因素對測試結果的影響,提出毫米波雷達角度分辨力測試方案。
1 雷達角度分辨力測試設備
毫米波雷達分辨力測試,分為實際目標的場景測試和模擬目標的實驗室仿真測試。實際目標的場景測試,通過在道路試驗場中由兩個特定距離、特定RCS的角錐反射器做圓弧運動實現,該實驗方式受試驗場地、角錐反射器參數以及試驗操作的限制,目前還無法進行試驗參數的定量對比,也無法進行目標速度的附加測試,因此本文通過目標模擬器進行模擬目標的試驗室仿真測試,角度分辨力測試環境如圖1所示。
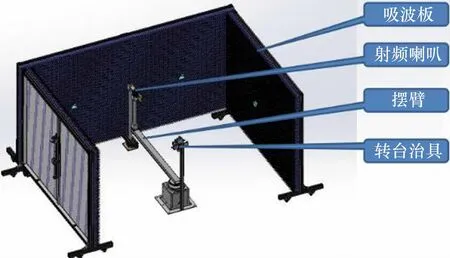
圖1 毫米波雷達角度分辨力測試環境設計圖
毫米波雷達角度分辨力測試設備包括:雷達目標模擬器、轉臺擺臂以及吸波板。如圖2和圖3所示,目標模擬器具備雙通道,轉臺擺臂有兩個,可同軸心轉動,兩個目標發射天線通過兩個同軸心的轉臺擺臂實現目標角度的分離;吸波板為拼成U型遮擋在待測毫米波雷達左右兩側及前方的屏蔽鋼板和附在鋼板內側的吸波材料。
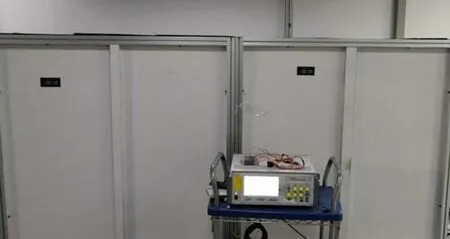
圖2 目標模擬器測試狀態圖
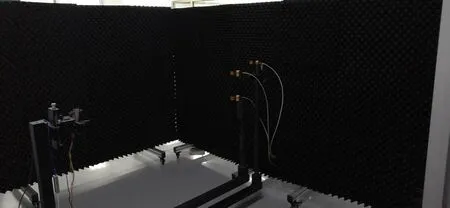
圖3 毫米波雷達角度分辨力測試環境圖
2 雷達角度分辨力測試方案
毫米波雷達角度分辨力分為水平角度分辨力和豎直角度分辨力。水平角度分辨力應用于道路交通過程中毫米波雷達前方多輛汽車、多個行人、多臺兩輪車等目標之間的角度分辨,也是日常生活中較為常用的角度分辨場景。豎直角度分辨力應用于隧道、路桿等位于車輛上方障礙物的識別,本文以FMCW角雷達的水平角度分辨力為例,提出毫米波雷達角度分辨力測試方案。
2.1 距離
距離是毫米波雷達目標探測的重要指標,亦是車載毫米波雷達實現碰撞預警、盲區檢測等結果輸出的重要參考指標。距離對毫米波雷達角度分辨力的影響表現為相同速度、角度、RCS的目標,當距離不同時測得的角度分辨力不同。
基于不同距離的角度分辨力測試,步驟如下:①毫米波雷達模擬裝車角度,固定在轉臺擺臂圓心的正上方,在雷達目標模擬器上設置兩個RCS均為10dBsm(或20dBsm)并帶有一定速度的目標,位于距離D1,兩目標天線 (目標A和目標B)通過轉臺擺臂一上一下正對毫米波雷達前端 (毫米波雷達信號發射端)固定,其極化方向與毫米波雷達前端的極化方向一致,此時目標A和目標B均處于毫米波雷達法線方向,毫米波雷達輸出為一個目標;②將目標A和目標B的角度分別以0.1°步進值朝相反方向對稱遠離,直到毫米波雷達輸出為兩個目標,記錄此時兩個目標與被測雷達的角度值θd1;③關閉目標模擬器的目標輸出,將目標A和目標B均恢復至法線方向,再將目標A和B的距離設為D2,重復步驟②,記錄目標A、目標B與被測雷達的角度θd2;④重復步驟③,共測試N組 (N≥5)數據,并記錄數據。
2.2 速度
毫米波雷達的速度探測,基于反射信號的頻偏實現,目標速度的大小體現在目標靠近或遠離車本體的快慢。速度對毫米波雷達角度分辨力的影響表現為相同距離、角度、RCS的目標,當速度不同時測得的角度分辨力不同。
基于不同速度的角度分辨力測試,步驟如下。
1)進行步驟①,其中目標的速度設為V1。
2)將目標A和目標B的角度分別以0.1°步進值朝相反方向對稱遠離,直到毫米波雷達輸出為兩個目標,記錄此時兩個目標與被測雷達的角度值θv1。
3)關閉目標模擬器的目標輸出,將目標A和目標B均恢復至法線方向,再將目標A和B的速度設為V2,重復步驟2),記錄目標A、目標B與被測雷達的角度θv2。
4)重復步驟3),共測試N組 (N≥5)數據,并記錄數據。
2.3 角度
目標距離的很小變化即可導致距離FFT或多普勒FFT峰值的相位變化,這是毫米波雷達角度估算的基本原理,而角度準確度會隨著測量角度的增大,準確度降低。不同毫米波雷達的FOV是不同的,毫米波雷達是否對在不同角度方向上的目標具有相同的角度分辨力,需要通過測量確定。
基于不同角度的角度分辨力測試,步驟如下。
1)進行步驟①,此時目標角度為θ1=0°。
2)將目標A和目標B的角度分別以0.1°步進值朝相反方向對稱遠離,直到毫米波雷達輸出為兩個目標,記錄此時兩個目標與被測雷達的角度值θJ1。
3)關閉目標模擬器的目標輸出,將目標A和目標B均恢復至θ2方向,重復步驟2),記錄目標A、目標B與被測雷達的角度θJ2。
4)重復步驟3),共測試N組 (N≥5)數據,并記錄數據。
2.4 RCS
RCS大小的不同,表現為毫米波雷達探測目標反射截面的大小,對于不同RCS的模擬目標,其角度分辨力的測試步驟如下。
1)進行步驟①,此時目標RCS為Q1。
2)將目標A和目標B的角度分別以0.1°步進值朝相反方向對稱遠離,直到毫米波雷達輸出為兩個目標,記錄此時兩個目標與被測雷達的角度值θQ1。
3)關閉目標模擬器的目標輸出,將目標A和目標B均恢復至法線方向,重復步驟2),再將目標A和目標B的RCS設為Q2,記錄目標A、目標B與被測雷達的角度θQ2。
4)重復步驟3),進行RCS為0dBsm、10dBsm和20dBsm的測試,并記錄數據。
3 雷達角度分辨力測試結果展示
3.1 距離
距離對毫米波雷達角度分辨力影響的測試結果見表1。

表1 距離對毫米波雷達角度分辨力影響
表1中毫米波雷達的角度分辨力為2×θdi,由表1中數據可觀察出,在目標模擬測試的情況下,角雷達的角度分辨力隨著距離的增大而減小。
3.2 速度
速度對毫米波雷達角度分辨力影響的測試結果見表2。
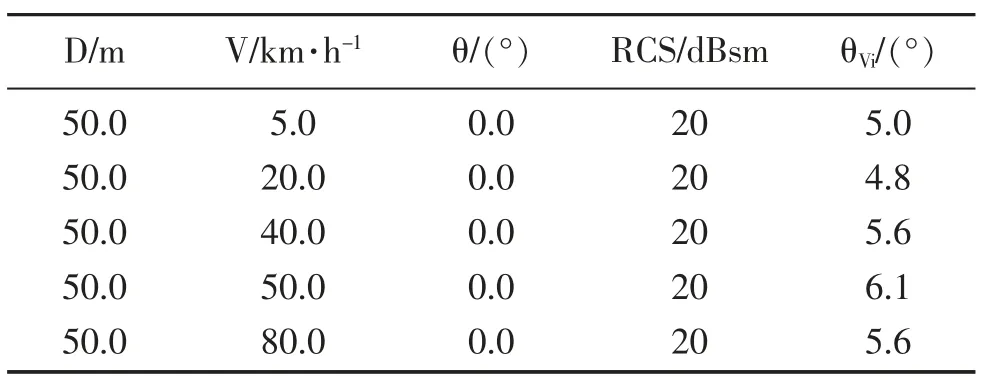
表2 速度對毫米波雷達角度分辨力影響
表2中毫米波雷達的角度分辨力為2×θVi,由表2中數據,可觀察出隨著目標速度的增大,角度分辨力在一定范圍內呈現不規律變化,且波動幅度不大。
3.3 角度
角度對毫米波雷達角度分辨力影響的測試結果見表3。

表3 角度對毫米波雷達角度分辨力影響
表3中毫米波雷達的角度分辨力為2×θJi,由表3中數據,可觀察出隨著目標角度的變化,毫米波雷達角度分辨力仍在一定范圍內波動,即目標角度的變化不影響毫米波雷達角度分辨力的測試結果。
3.4 RCS
RCS對毫米波雷達角度分辨力影響的測試結果見表4。
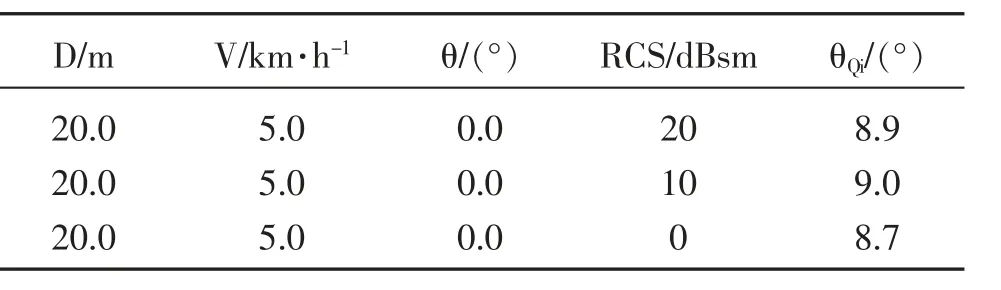
表4 RCS對毫米波雷達角度分辨力影響
表4中毫米波雷達的角度分辨力為2×θQi,由表4中數據,可觀察出RCS的變化,不影響毫米波雷達角度分辨力的測試。
4 結論
本文從毫米波雷達目標識別性能影響因素入手,在目標模擬器模擬目標的仿真試驗條件下,通過對變量及結果的橫向對比,分析距離、速度、角度、RCS對毫米波雷達角度分辨力測試結果的影響。從上述數據可得出距離是毫米波雷達角度分辨力測試的變量,而速度、角度、RCS對毫米波雷達的測試基本無影響。毫米波雷達角度分辨力測試方案可基于此結論,以不同目標距離,分組對毫米波雷達角度分辨力進行測試。而從角度分辨力的計算原理可知,毫米波雷達的角度分辨力僅與天線個數有關,因此雷達目標模擬器的模擬仿真測試、不同型號間毫米波雷達的性能區別、仿真測試與真實目標的道路試驗之間的測試結果區別,仍需進一步地研究與探討。
