汽車碰撞熄火原理及測試驗證方法
2021-06-04 03:39:50卿輝,陳成,王剛
汽車電器 2021年5期
關鍵詞:信號
卿 輝,陳 成,王 剛
(神龍汽車有限公司技術質量部電子電器分部,湖北 武漢 430056)
1 前言
隨著汽車數量的增加和行駛速度的不斷提高,行車安全越來越重要。而在所有的汽車事故中,與碰撞相關的事故占90%以上[1]。汽車碰撞在實際生活總不可避免,則汽車在發生碰撞后,如何保護車內人員及車外人員安全,將事故風險降至最低,汽車碰撞后,車輛狀態是否符合法規和相關標準要求是至關重要的。一般車輛最常見的要求包括:安全氣囊點爆、發動機熄火 (新能源車輛要求高壓電切斷,電機不工作)、雙閃燈點亮、車門解鎖、后窗禁止升降功能解除等[2]。本文重點討論車輛熄火這一要求。因此,新車型在設計研發階段,必須要將完整的車輛送至正規的檢測機構來進行真實的碰撞,以判斷車輛是否符合國家法規等要求。如果車輛在第一次發運到測試機構進行碰撞時,碰撞結果不合格,則需要車企再次準備新車發運至檢測機構進行碰撞測試,直到碰撞結果合格。如果一種方法可以保證車輛在發運至檢測機構前保證電子電器零件 (硬件、軟件、標定、配置參數)滿足條件,則可以避免車輛多次重復檢測,減少公司經濟成本。
本文則從傳統燃油車輛和純電動車輛碰撞熄火的原理出發,找出了一種模擬安全氣囊碰撞發出碰撞信號的方法來驗證車輛是否熄火。利用該方法可以檢查發運檢測中心的車輛是否滿足碰撞要求。如果模擬測試結果合格,則車輛可以發運至檢測機構進行真實的碰撞;如果模擬測試不合格,則車企技術員還可以根據該方法判斷碰撞熄火系統中哪一零件異常,找到故障根源,進行返修后,再次模擬測試,直至模擬測試合格后即可以發運至檢測機構進行真實的碰撞測試。
2 傳統燃油汽車碰撞熄火工作原理
傳統燃油車碰撞熄火工作原理簡圖如圖1所示。即車輛碰撞傳感器通過物理硬線與RBG(安全氣囊控制盒)相連,RBG再通過CAN HAB總線 (一種低速CAN網,通信速率125kb/s)將相關碰撞信息 (如碰撞速度的大小,此處碰撞速度有3種,即高速、中速和低速,及碰撞位置、碰撞類型等)發送給BSI(智能伺服盒),BSI同樣也通過CAN IS總線 (一種高速CAN網,通信速率為500kb/s)將碰撞信號INFO_CRASH發送給CMM(發動機電控單元)。CMM再通過物理硬線信號發送一個高電平電壓信號給車輛熔斷絲盒上PU副繼電器,控制PU副繼電器斷開,由于PU副繼電器直接控制汽車燃油的油泵工作與否,當PU副繼電器閉合后,油泵供電正常,車輛不熄火;當PU副繼電器斷開后,油泵供電切斷,車輛熄火[3]。因此,當BSI發送了CAN信號INFO_CRASH到CMM,則油泵供電切斷,車輛熄火。當BSI不發送CAN信號INFO_CRASH到CMM,則油泵供電正常,車輛不會熄火。

圖1 傳統燃油車碰撞熄火工作原理簡圖
3 新能源純電動汽車碰撞切斷高壓電工作原理
新能源汽車的碰撞切斷高壓電這一功能系統主要包括:碰撞傳感器、RBG、BSI智能伺服盒、VCU整車控制電控單元以及BMS電源管理系統[4]。其工作原理如圖2所示。
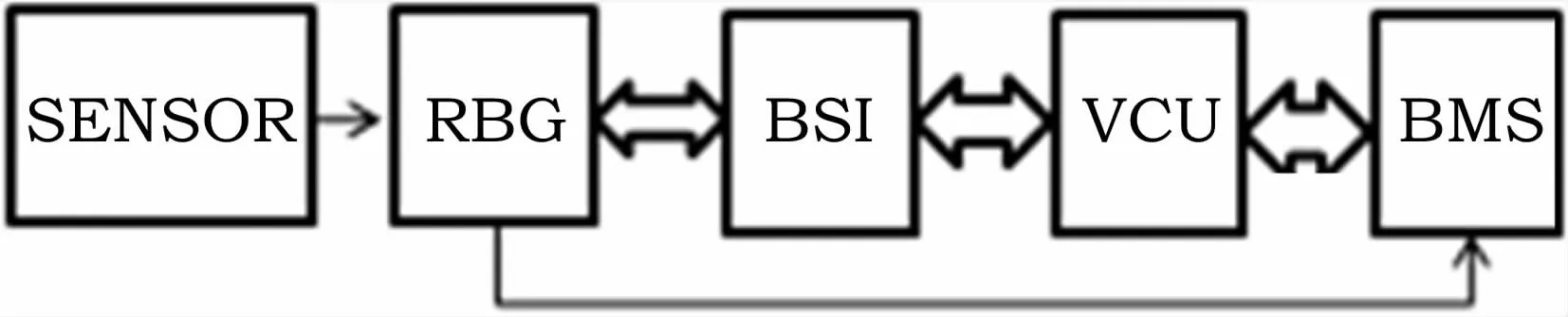
圖2 碰撞切斷高壓電工作原理
新能源汽車上高壓電切斷有兩種途徑:一是碰撞傳感器將碰撞信息通過硬線發送給RBG,RBG將碰撞信息 (包括車輛碰撞位置、碰撞速度以及碰撞類型)通過CAN HAB總線發送給BSI,BSI再將相對應的碰撞信息通過CAN HS1(高速CAN網,通信速率500kb/s)總線發送給VCU,同樣VCU也會將此碰撞信息通過ECAN(純電動車新增一條高速CAN網絡,該CAN網的網關是VCU,通信速率500kb/s)總線發送給BMS,BMS收到碰撞信號info_crash信號后控制電源管理系統中主繼電器的斷開來切斷電池包的高壓電,車輛熄火。二是碰撞傳感器將碰撞信息通過硬線發送給RBG,RBG將脈沖PWM信號通過硬線直接接到BMS,BMS控制主繼電器的斷開來切斷電池包的高壓電,車輛熄火。兩種途徑只要滿足一種即可實現高壓電切斷。
4 車輛碰撞測試驗證方法
結合前述兩種類型汽車碰撞熄火原理,可知碰撞信號的發出端 (碰撞傳感器和RBG)相同,只是處理控制信號INFO_CRASH的電控單元不同。因此,借用CAN網絡診斷工具(硬件和軟件)以及專用安全氣囊控制模塊程序,在整車上模擬RBG發出相對應的碰撞信號,即可實現模擬車輛在不同碰撞方式下能否熄火的方法。
4.1 硬件和軟件設置
測試方法中,所需硬件設備為VECTOR VN1630ACAN/LIN接口硬件,帶CAN HAB網DB9端子的三通轉接線。所需軟件為CANalyzer。在已有CANalyzer配置文件的前提下,需導入面板、CAPL(CAN總線訪問編程語言)程序、系統變量文件,具體方法如下。
1) 在“【File】--【Database Overview】”菜單中導入DBC數據庫文件,默認IS網段的數據庫綁定至CAN1,CAN HAB等網段的數據庫綁定至CAN2。
2) 在“【Configuration】--【System Variables】”菜單中導入系統變量文件。
3) 在“【View】--【Measurement Setup】”菜單中導入CAPL文件。
4) 在“【Configuration】--【Panels】”菜單中導入面板文件。
以上步驟完成后,安全氣囊模塊功能測試圖形化界面便形成。
4.2 安全氣囊測試模塊圖形化界面
模擬安全氣囊控制程序模塊界面如圖3所示。該程序模塊中,ECU simulation setup:Airbag安全氣囊模擬設置,可以用來設置是否使用CAPL來模擬Airbag的功能以及是否連續向CAN網上發送信息幀ETAT_INFO_CRASH。Front area crash、Lateral area crash、Rear area crash,分別模擬車輛前部、側部、后部遭到碰撞的情況,每種碰撞又細分為高速碰撞、中等速度碰撞、低速碰撞、可修復性碰撞。Advanced crash setting:高級碰撞設置區域,可以用來初始化所有的碰撞信息 (即清除所有碰撞信息)、模擬車輛碰撞之后發生翻轉、模擬車輛撞到行人等。Crash information TX state:信息幀發送指示。當短按面板上的任何一個按鍵時,如果碰撞信息發送成功,指示燈會亮起約1s時間,然后熄滅。
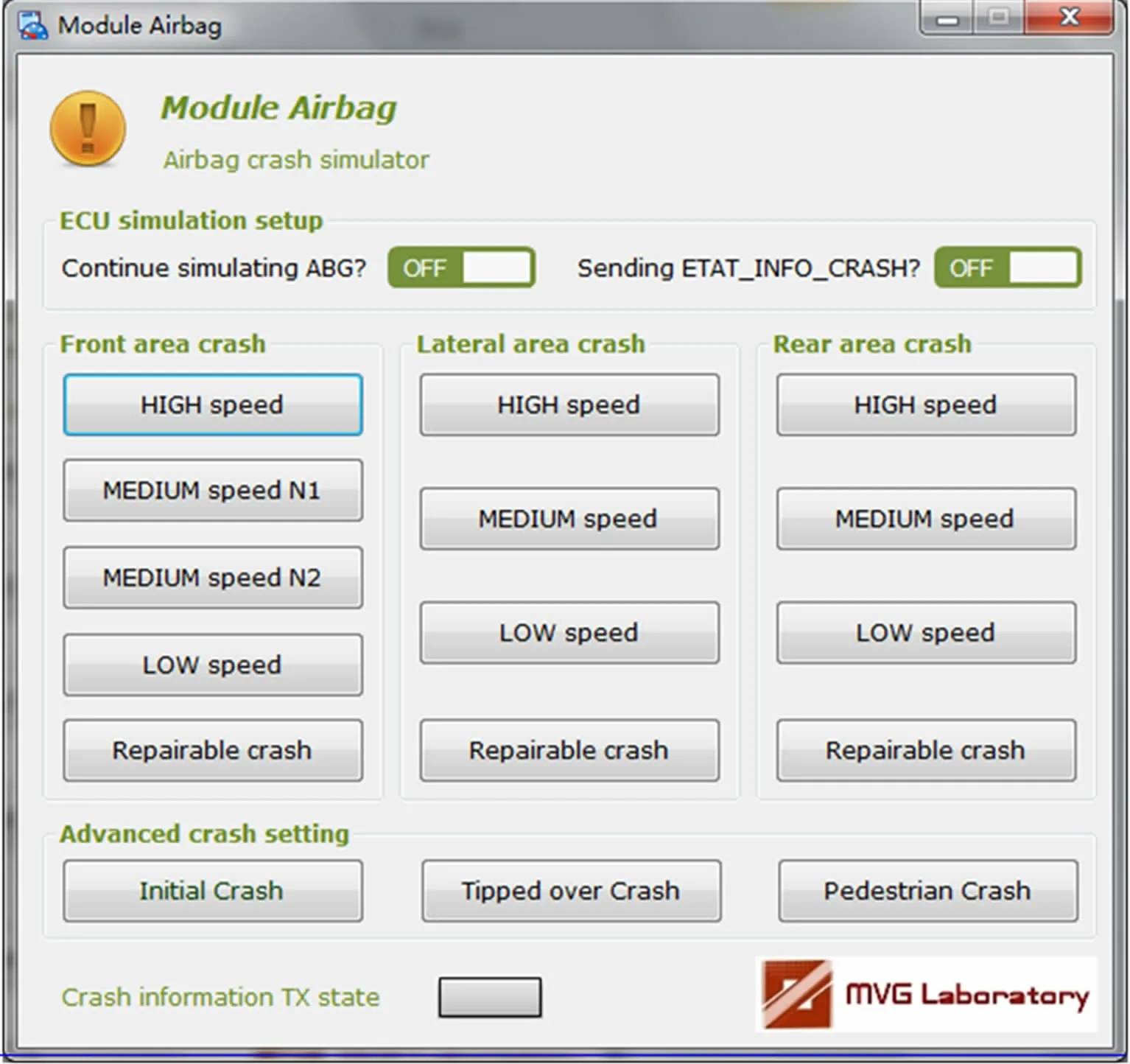
圖3 模擬安全氣囊控制程序模塊界面
4.3 具體測試原理
在碰撞測試實車上切斷RBG控制盒的供電以及斷開CAN HAB網線的基礎上,采用車輛診斷工具VECTOR VN1630A CAN/LIN接口硬件以及CANALYZER軟件中專用程序模塊module airbag來模擬RBG電控單元發送相應的碰撞信息給BSI,它可以模擬當車輛發生各種碰撞時RBG向CAN HAB網上發送的碰撞信息 [具體的信息如:INFO_CRASH(碰撞信號);FRONT_F_VIT(前部中速碰撞),CAN HAB上信號ID OX018],當BSI收到正常的碰撞信息后,將碰撞信號 (INFO_CRASH)在CAN IS網絡上發出。
對于新能源車輛,VCU收到BSI CAN IS上發送的正確的碰撞信號后,VCU在ECAN高速網上將發出INFO_CRASH的信號給BMS。BMS控制主繼電器斷開的同時,也在ECAN網上實時監測高壓電池包主繼電器狀態,其CAN信號main connector state對應的值為close時,表示高壓電沒有切斷;該CAN信號對應的值為open時,表示高壓電已經斷開。對于傳統燃油車,CMM在收到BSI CAN HS1上發送的正確的碰撞信號后,會通過硬線信號來控制油泵的切斷,車輛即可熄火。
4.4 具體測試步驟
如上所述,兩種車輛測試方法基本一致,下面以新能源車輛的測試方法為例進行說明。新能源車輛具體實施起來,步驟如下。
1)提前將車輛上RBG的供電熔斷絲拔掉以切斷RBG電源,來斷開RBG ECU與CAN網的連接。
2)將VECTOR硬件設備VN1630A CAN/LIN接口一端與PC電腦連接。VECTOR硬件設備VN1630A CAN/LIN另一端的第2通道 (該硬件設備上共有4個CAN/LIN通道)與整車CAN HAB網絡相連;1通道和整車CAN HS1相連;3通道和整車CAN IDIV(一種低速CAN網,通信速率500kb/s)相連;4通道和整車ECAN相連。此種連接方式并不固定,測試人員可以結合試驗需求和測試習慣自己選擇,但需要注意的是,CAN HAB只能選擇2通道,因為Airbag moudule程序模塊中對CAN HAB接口已經做了明確的定義。
3)將Airbag module程序加載到CANALYZER軟件,按照前述軟件設置方法,調出如圖3中所示的面板。并運行CANALYZER軟件,保證整車RBG功能正常,一旦CANALYZER軟件停止運行,儀表上RBG故障指示燈常亮。
4)車輛點火,保證車輛高壓閉合,整車運行正常。
5)點擊圖3中的Continue simulating RBG按鈕激活模擬的碰撞信號,然后再根據測試的要求點擊相應的高速high speed、低速low speed、中速medium speed等按鈕,則模擬仿真的RBG碰撞信號發出。
6)在CANALYZER軟件中找出與碰撞相關的所有CAN信號,則可以實時關注實車上CAN網絡信號,當ECAN上BMS發送的信號main connector state對應的值為open時,則說明電池包高壓已被切斷。
7)如果高壓電被切斷,則說明車輛狀態已經滿足碰撞中切斷高壓電的條件,車輛可以發運至檢測中心進行碰撞試驗。如果高壓電沒有被切斷,則通過采集的CAN HS1以及ECAN上的CAN數據,可以很準確地判斷問題點是BSI、VCU還是BMS。然后根據故障點查找故障原因,找到解決辦法,保證車輛發運至碰撞檢測中心前滿足高壓切斷條件。
5 故障案例
5.1 東風標致E2008碰撞時高壓電無法切斷
在新能源車輛E2008有3輛車發運至天津檢查中心進行實車碰撞測試時,碰撞結果顯示3輛車中有1輛車輛在中速的情況下進行碰撞,碰撞結束后,檢測人員對車輛進行檢測時發現該車高壓電沒有切斷,導致測試結果沒有通過。
該故障車輛運回公司后,技術員對車輛用文中提到的測試方法進行模擬測試,發現BSI通過CAN高速網將info_crash發送給VCU,VCU也將該信號在ECAN高速網上進行了轉發,但BMS在CAN ECAN網絡上發送的信號main connector state對應的值依舊為close(正常應為open),則車輛高壓電沒有斷開即為BMS造成。最后對發運3輛車輛的硬件、軟件、標定、編碼參數進行了逐一對比,發現故障車輛中BMS的軟件與正常車輛的軟件版本不一致,因此該故障車問題根源就判定為BMS軟件導致。
5.2 東風標致2008可修復前碰時車輛熄火
東風標致2008,在模擬一種前部可修復性碰撞 (Repair_crash_front)時,按照測試案例的要求,此種可修復性的碰撞,發動機不應熄火。但是實際測試中模擬碰撞時,測試結果為車輛熄火。
依據前述原理可知,車輛熄火是因為CMM收到了BSI發出的事件幀 (ID 4C8 info_crash)。而此種狀態的碰撞要求BSI不發送該事件幀給CMM,因此判定該問題為BSI軟件問題。后經PSA(法國標致雪鐵龍集團)BSI團隊驗證核實該問題是BSI軟件導致。
6 結束語
隨著新能源和智能網聯技術的不斷成熟,越來越多的新車型將會涌現在各大主機廠。因此,作為技術員,首先需要深入新產品去了解車輛碰撞熄火原理;其次,需要用專業的知識判斷現有的測試方法是否能應用到新車型上;如果不行,最后需要重新研究和開發一種新的測試方法來滿足新車型碰撞測試要求。這樣就能保證將車輛發運碰撞測試檢測中心前的狀態 (硬件、軟件、編碼參數)正確。避免新車型重復碰撞測試,降低成本的同時也提高了產品的開發效率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
