基于全網(wǎng)感知的用電故障監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
2021-06-04 03:09:14余佳劉宇鵬李軒張理放
微型電腦應(yīng)用 2021年5期
余佳, 劉宇鵬, 李軒, 張理放
(內(nèi)蒙古電力科學(xué)研究院分公司, 內(nèi)蒙古 呼和浩特 010020)
0 引言
隨著國(guó)民經(jīng)濟(jì)長(zhǎng)足發(fā)展,用電需求不斷增長(zhǎng),據(jù)國(guó)家能源局?jǐn)?shù)據(jù)顯示:2016—2018年全社會(huì)平均用電量63 575億千瓦時(shí),平均增長(zhǎng)率7.53%。用電量的增長(zhǎng),使得電力系統(tǒng)規(guī)模越發(fā)龐大,內(nèi)部體系愈發(fā)復(fù)雜,用電客戶和供電公司在正常用電和供電的同時(shí),對(duì)用電信息采集的準(zhǔn)確性和實(shí)時(shí)性等質(zhì)量要求也越來(lái)越高。近年來(lái),伴隨著信息化、智能化技術(shù)的創(chuàng)新與應(yīng)用落地,用電信息采集的質(zhì)量、效率得到了穩(wěn)固提升。然而下行模塊在線率和電表停電故障仍作為兩大主導(dǎo)因素制約著用電信息質(zhì)量的采集。如何能設(shè)計(jì)一套即針對(duì)下行模塊狀態(tài)進(jìn)行準(zhǔn)確、實(shí)時(shí)監(jiān)控,又同時(shí)針對(duì)停電故障快速響應(yīng)的監(jiān)測(cè)系統(tǒng)就顯得尤為重要。
在詳細(xì)調(diào)查供電公司對(duì)模塊狀態(tài)監(jiān)控和停電故障上報(bào)的需求,深入分析傳統(tǒng)窄帶載波通信存在通信速率低、無(wú)法針對(duì)停電故障快速響應(yīng)等問(wèn)題的癥結(jié),設(shè)計(jì)了一套基于微功率無(wú)線MESH網(wǎng)絡(luò)搭建的用電監(jiān)測(cè)系統(tǒng)。該系統(tǒng)主要針對(duì)微功率無(wú)線MESH網(wǎng)絡(luò)中全網(wǎng)感知功能和停電上報(bào)功能進(jìn)行仿真和監(jiān)測(cè),通過(guò)集中器、電表(含單相、三相)、微功率無(wú)線MESH模塊(CAC、DAU)、仿真設(shè)備模擬真實(shí)電網(wǎng)環(huán)境中的組網(wǎng)、抄表、停電故障,達(dá)到監(jiān)測(cè)全網(wǎng)感知功能與停電故障上報(bào)功能運(yùn)行狀態(tài)的目的,為用電信息采集的穩(wěn)定運(yùn)行提供數(shù)據(jù)上的支持。
1 研究現(xiàn)狀
目前,主流的信息采集的通信方式為M-BUS總線、RS-485、微功率無(wú)線、無(wú)線公網(wǎng)和電力線載波。微功率無(wú)線和無(wú)線公網(wǎng)無(wú)需考慮布線,可避免布線、現(xiàn)場(chǎng)改造、線路老化所帶來(lái)的物資消耗,能有效降低成本。但無(wú)線公網(wǎng)設(shè)備運(yùn)維費(fèi)較高,需必要的運(yùn)營(yíng)商參與。而微功率無(wú)線無(wú)需交納通信服務(wù)費(fèi)、組網(wǎng)靈活、速度快,是學(xué)者應(yīng)用較多的通信方式。
周黃山、張鄭祎[1](2019)采用微功率無(wú)線技術(shù),對(duì)多表合一信息采集系統(tǒng)進(jìn)行理論研究設(shè)計(jì),為國(guó)家電網(wǎng)推進(jìn)水、電、氣、熱多表合一信息采集系統(tǒng)提供理論支持;趙慶文[2](2015)運(yùn)用SE微功率無(wú)線模塊與自動(dòng)化技術(shù),設(shè)計(jì)了一款運(yùn)用于箱式變電站溫度監(jiān)測(cè)的無(wú)線溫度監(jiān)測(cè)器,解決人工抄表工作,提高設(shè)備利用率,滿足實(shí)時(shí)查詢需求;常燕(2013)、王健(2014)[3-4]基于微功率無(wú)線組網(wǎng)技術(shù)提出了一種安裝便捷、維護(hù)簡(jiǎn)單、運(yùn)行穩(wěn)定、成本低廉的配電線路故障定位系統(tǒng)。基于全網(wǎng)感知技術(shù)應(yīng)用于電網(wǎng)系統(tǒng)的,國(guó)內(nèi)學(xué)者研究甚少。李宇婷等[5](2016)采用全網(wǎng)感知技術(shù)、增加研判樣本數(shù)量等途徑,有效解決了現(xiàn)有故障研判技術(shù)質(zhì)量不穩(wěn)定、誤判現(xiàn)象嚴(yán)重等問(wèn)題。
綜上所述,本文采用微功率無(wú)線通信方式,利用MESH全網(wǎng)感知技術(shù),設(shè)計(jì)搭建性能穩(wěn)定、覆蓋全網(wǎng)的用電故障監(jiān)測(cè)系統(tǒng),并針對(duì)計(jì)量中心電網(wǎng)系統(tǒng)進(jìn)行測(cè)試。
2 微功率無(wú)線MESH全網(wǎng)感知理論簡(jiǎn)介
2.1 微功率無(wú)線MESH全網(wǎng)感知
微功率無(wú)線MESH全網(wǎng)感知是基于微功率無(wú)線互聯(lián)互通協(xié)議構(gòu)建的MESH網(wǎng)絡(luò),利用在網(wǎng)節(jié)點(diǎn)進(jìn)行轉(zhuǎn)發(fā)感知功能的幀,將節(jié)點(diǎn)自身在網(wǎng)狀態(tài)添加到網(wǎng)節(jié)點(diǎn)序列中。同時(shí),將感知幀在規(guī)定的時(shí)隙內(nèi)進(jìn)行廣播轉(zhuǎn)發(fā),使整個(gè)網(wǎng)絡(luò)的在網(wǎng)結(jié)點(diǎn)都被感知到,進(jìn)而完成對(duì)整個(gè)網(wǎng)路的實(shí)時(shí)監(jiān)控。全網(wǎng)感知功能的實(shí)現(xiàn)主要依賴系統(tǒng)主站、集中器和互通網(wǎng)絡(luò)等環(huán)節(jié)。全網(wǎng)感知功能通過(guò)對(duì)1 376.1、1 376.2微功率無(wú)線互聯(lián)互通協(xié)議進(jìn)行增補(bǔ),進(jìn)而達(dá)到控制全網(wǎng)感知執(zhí)行狀態(tài)和獲取全網(wǎng)感知結(jié)果信息的目的。簡(jiǎn)要分布如圖1所示。

圖1 微功率無(wú)線MESH全網(wǎng)感知簡(jiǎn)要分布圖
全網(wǎng)感知網(wǎng)絡(luò)識(shí)別過(guò)程是一個(gè)封閉式的任務(wù),整個(gè)過(guò)程由上行廣播和下行廣播兩大過(guò)程組成,下行廣播又分為主節(jié)點(diǎn)時(shí)隙、下行正常時(shí)隙和競(jìng)爭(zhēng)時(shí)隙三個(gè)小過(guò)程,上行廣播則只包括上行正常時(shí)隙過(guò)程。每個(gè)時(shí)隙150 ms,總時(shí)隙由主節(jié)點(diǎn)根據(jù)實(shí)際在網(wǎng)節(jié)點(diǎn)個(gè)數(shù)決定。時(shí)隙組成圖如圖2所示。

圖2 全網(wǎng)感知網(wǎng)絡(luò)時(shí)隙組成圖
全網(wǎng)感知時(shí)隙分布需要遵循如下設(shè)計(jì)標(biāo)準(zhǔn):(1)為了保證全網(wǎng)感知時(shí)序正確,各節(jié)點(diǎn)必須嚴(yán)格按照在自己的時(shí)隙發(fā)射的原則,超過(guò)了自己的時(shí)隙,必須到指定的競(jìng)爭(zhēng)時(shí)隙進(jìn)行發(fā)射,其余時(shí)間不允許發(fā)射,避免對(duì)其他的節(jié)點(diǎn)造成干擾;(2)競(jìng)爭(zhēng)時(shí)隙是N/8取整,最少為1;(3)主節(jié)點(diǎn)在前3個(gè)時(shí)隙發(fā)起全網(wǎng)感知幀(時(shí)隙分別為0、1、2),其余的DAU進(jìn)行識(shí)別轉(zhuǎn)發(fā)。
全網(wǎng)感知過(guò)程的目的是疊加網(wǎng)絡(luò)中每一節(jié)點(diǎn)的狀態(tài)信息數(shù)組,每個(gè)模塊的時(shí)隙在廣播幀中都有1 bit與自身時(shí)隙相關(guān)的位置,通過(guò)對(duì)這個(gè)bit進(jìn)行置位,表示在網(wǎng)的狀態(tài),如表1所示。
2.2 微功率無(wú)線停電故障上報(bào)
微功率無(wú)線停電上報(bào)是在原有微功率無(wú)線模塊的基礎(chǔ)上增加超級(jí)電容,使模塊判斷發(fā)生停電故障時(shí),可以藉由超級(jí)電容供電并通過(guò)不受電力線限制的無(wú)線信道將停電故障信息上報(bào)至終端,并由終端上報(bào)至主站系統(tǒng)。無(wú)線模塊通過(guò)多種機(jī)制增加停電故障信息上報(bào)的成功率,這些機(jī)制如下所述。

表1 bit置位狀態(tài)表
2.2.1 重復(fù)上報(bào)機(jī)制
超級(jí)電容在充滿電的情況下,可至少完成3次上報(bào),每次上報(bào)存在一定上報(bào)間隔,如圖3所示。

圖3 重復(fù)上報(bào)圖示
2.2.2 層次分批攜帶上報(bào)
為了提高同一條路徑上故障上報(bào)的成功率,在每一次上報(bào)周期內(nèi)根據(jù)既定的上報(bào)時(shí)隙安排和每個(gè)上報(bào)節(jié)點(diǎn)的層級(jí)采用由高到低的優(yōu)先級(jí)進(jìn)行上報(bào),低層級(jí)的節(jié)點(diǎn)將攜帶同線路上高層級(jí)節(jié)點(diǎn)的故障信息一并上報(bào)給下一層級(jí)節(jié)點(diǎn),如圖4所示。
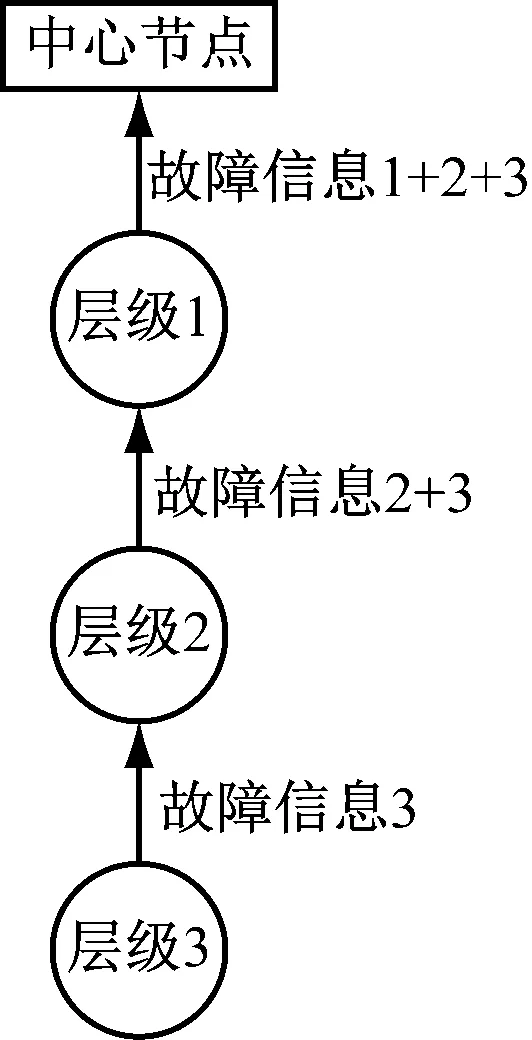
圖4 層次分批攜帶上報(bào)圖示
2.2.3 周邊節(jié)點(diǎn)保存上報(bào)狀態(tài)
為了進(jìn)一步提高上報(bào)成功率,發(fā)生停電故障節(jié)點(diǎn)的鄰居節(jié)點(diǎn)也同時(shí)會(huì)記錄故障節(jié)點(diǎn)的停電故障狀態(tài),即便在故障節(jié)點(diǎn)上報(bào)失敗后,也可以充當(dāng)中繼節(jié)點(diǎn)將記錄的停電故障上報(bào)至中心節(jié)點(diǎn),如圖5所示。

圖5 周邊節(jié)點(diǎn)保存上報(bào)狀態(tài)圖示
3 用電故障監(jiān)測(cè)系統(tǒng)設(shè)計(jì)
3.1 系統(tǒng)整體構(gòu)架
基于微功率無(wú)線MESH全網(wǎng)感知由主控單元、單相/三相遠(yuǎn)控衛(wèi)星單元、單相/三相衛(wèi)星單元三部分構(gòu)成。其中主控單元由集中器、路由器、仿真主站三部分組成;遠(yuǎn)控衛(wèi)星單元是搭載遠(yuǎn)程控制功能的單相/三相表衛(wèi)星單元,可以通過(guò)有線(以太網(wǎng))/無(wú)線(WIFI)的形式遠(yuǎn)程控制電表拉合閘操作,亦可手動(dòng)控制拉合閘操作。同時(shí)安裝有時(shí)控開關(guān),通過(guò)設(shè)定可以定時(shí)進(jìn)行拉合閘操作;單相/三相衛(wèi)星單元未搭載遠(yuǎn)程控制功能,可以通過(guò)安裝時(shí)控開關(guān)定時(shí)進(jìn)行合閘操作,如圖6所示。

圖6 用電故障監(jiān)測(cè)系統(tǒng)整體設(shè)計(jì)圖
3.2 基礎(chǔ)功能設(shè)計(jì)
3.2.1 硬件環(huán)境設(shè)計(jì)
(1) 設(shè)計(jì)目標(biāo)
系統(tǒng)監(jiān)控的核心功能全部基于微功率無(wú)線MESH網(wǎng)絡(luò),所以完成網(wǎng)絡(luò)的搭建是系統(tǒng)設(shè)計(jì)的首要工作,在完成基本網(wǎng)絡(luò)搭建的同時(shí),需要布置至少完成2層或3層網(wǎng)絡(luò)的組網(wǎng),以便多級(jí)微功率無(wú)線網(wǎng)絡(luò)模擬。另外,配備常用的用電采集設(shè)備,主要為集中器、單相表、三相表及仿真現(xiàn)場(chǎng)停電故障仿真設(shè)備。
(2) 系統(tǒng)柜設(shè)計(jì)
系統(tǒng)機(jī)柜根據(jù)功能分為主機(jī)柜和可移動(dòng)表箱兩部分:主機(jī)柜用于掛載終端、電能表(單相、三相)和仿真設(shè)備,組建主MESH網(wǎng)絡(luò),實(shí)現(xiàn)大批量的仿真控制。可移動(dòng)表箱用于掛載電能表、三相和仿真設(shè)備,用于組建多級(jí)網(wǎng)絡(luò),實(shí)現(xiàn)網(wǎng)絡(luò)分層。總體硬件布置如圖7所示。

圖7 總體硬件布置圖
(3) 仿真設(shè)備設(shè)計(jì)
仿真設(shè)備用于模擬停電故障,仿真設(shè)備硬件由可編程時(shí)控開關(guān)、無(wú)線串口服務(wù)器和可控?cái)嗦菲鹘M成,根據(jù)操作模式分為自動(dòng)(定時(shí))與遙控兩種模式。
自動(dòng)(定時(shí))模式:自動(dòng)模式將根據(jù)設(shè)定好的時(shí)間定時(shí)進(jìn)行仿真操作,此模式用于長(zhǎng)時(shí)間功能穩(wěn)定性監(jiān)控,監(jiān)控期間無(wú)需人為手動(dòng)操作。
遙控模式:通過(guò)遙控模式,操作人員可以通過(guò)監(jiān)測(cè)主站主動(dòng)觸發(fā)停電故障,便于實(shí)時(shí)觀察監(jiān)控結(jié)果和進(jìn)行功能演示。仿真設(shè)備硬件結(jié)構(gòu)設(shè)計(jì)如圖8所示。

圖8 仿真設(shè)備設(shè)計(jì)圖
3.2.2 系統(tǒng)軟件環(huán)境設(shè)計(jì)
(1) 功能目標(biāo)
系統(tǒng)軟件需達(dá)成以下基礎(chǔ)功能和擴(kuò)展功能目標(biāo)。
基礎(chǔ)功能:用電采集主站基礎(chǔ)功能,如檔案管理、數(shù)據(jù)召測(cè)、數(shù)據(jù)報(bào)表、故障記錄。
擴(kuò)展功能:用于仿真設(shè)備控制、設(shè)備狀態(tài)監(jiān)控。
(2) 主站系統(tǒng)架構(gòu)
主站軟件系統(tǒng)采用B/S架構(gòu),其主要由4層組成,它們分為別用戶層、應(yīng)用層、數(shù)據(jù)層和鏈路層。每層功能分工如圖9所示。

圖9 主站系統(tǒng)設(shè)計(jì)圖
(4) 主站功能
主站功能設(shè)計(jì)如表2所示。

表2 主站功能表
(5) 數(shù)據(jù)采集規(guī)則設(shè)計(jì)
數(shù)據(jù)采集規(guī)則如表3—表5所示。

表3 數(shù)據(jù)采集規(guī)則
4 系統(tǒng)測(cè)試
系統(tǒng)設(shè)計(jì)后,需根據(jù)計(jì)量中心電網(wǎng)系統(tǒng)對(duì)系統(tǒng)功能進(jìn)行有效、實(shí)用性測(cè)試,包括基礎(chǔ)功能測(cè)試和監(jiān)控功能測(cè)試,監(jiān)控功能指停電故障上報(bào)與全網(wǎng)感知功能。測(cè)試結(jié)果顯示:基于微功率無(wú)線MESH全網(wǎng)感知系統(tǒng)各項(xiàng)功能均達(dá)到設(shè)計(jì)要求,實(shí)現(xiàn)對(duì)下行模塊狀態(tài)進(jìn)行準(zhǔn)確、實(shí)時(shí)監(jiān)控。同時(shí),針對(duì)停電故障實(shí)現(xiàn)快速響應(yīng)。測(cè)試結(jié)果如表4、表5所示。

表4 基礎(chǔ)功能測(cè)試結(jié)果表

表5 監(jiān)控功能測(cè)試結(jié)果表
5 總結(jié)
本系統(tǒng)停電上報(bào)響應(yīng)時(shí)間為從觸發(fā)停電操作(拉/合閘)到前臺(tái)提示停電事件在10秒內(nèi)完成;全網(wǎng)感知數(shù)據(jù)更新頻率需至少5分鐘更新一次;仿真主站頁(yè)面響應(yīng)時(shí)間,非報(bào)表頁(yè)面2秒內(nèi)打開,報(bào)表類頁(yè)面3秒內(nèi)打開。有效解決了用電信息采集過(guò)程中下行模塊在線率和電表停電故障問(wèn)題。
系統(tǒng)應(yīng)用于計(jì)量中心電網(wǎng)系統(tǒng),能大大降低成本,同時(shí),使用戶可以直觀地看到微功率無(wú)線MESH網(wǎng)絡(luò)全網(wǎng)感知功能和停電故障上報(bào)功能的運(yùn)行效果,提升了數(shù)據(jù)采集的質(zhì)量和效率。
猜你喜歡
中華詩(shī)詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國(guó)科技論壇(2017年7期)2017-07-25 08:49:53
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
