帶四連桿滑軌機構卷揚機式自卸掛車設計
2021-06-08 21:59:49高巧明曹鵬鋮張星鄧緋怡王連其黃東輝潘棟曾俊豪
廣西科技大學學報 2021年2期
高巧明 曹鵬鋮 張星 鄧緋怡 王連其 黃東輝 潘棟 曾俊豪
摘? 要:針對自卸掛車在舉升過程中存在不平穩的情況和貨箱在上裝和下滑過程中缺少引導的問題,通過計算設計液壓舉升機構、選擇卷揚機及卷揚機液壓裝卸系統,并基于遺傳優化算法設計掛車尾部的四連桿滑軌機構.在理論方法中,得出了自卸掛車比較適合的液壓舉升機構、卷揚機系統及四連桿滑軌機構,并用四桿機構設計軟件對四連桿滑軌機構進行分析校核.軟件分析和模擬路徑表明:四連桿滑軌機構最大擺角為85.43°,符合預期所需;四連桿滑軌機構的運動符合預定軌跡,并且運動狀態無干涉現象.
關鍵詞:卷揚機式自卸掛車;舉升機構;遺傳算法;四連桿滑軌機構
中圖分類號:U469.4? ?DOI:10.16375/j.cnki.cn45-1395/t.2021.02.008
0引言
近年來,隨著工業技術的不斷發展,為滿足人們作業現場的需求,市場上出現了具有自卸功能的掛車,自卸掛車可以組成各種作業機組,滿足人們工作需要[1].關曲光等[2-3]針對自卸掛車在舉升過程中的側翻問題,建立了自卸車舉升側傾動力學的四自由度非線性模型,通過質量及質心變化來分析自卸掛車舉升側翻.對于液壓裝卸系統,王國安等[4]在液壓油缸再制造技術上作了可行性分析.郝妮妮等[5-6]基于遺傳算法對機械結構進行優化設計,運用遺傳算法不斷迭代,最終得到優化問題的最優解.
目前,裝有卷揚機和尾部帶有滑軌的自卸掛車很少.本文在已有的研究基礎上,計算設計液壓舉升機構,選擇卷揚機類型,并在尾部設計四連桿滑軌機構,使掛車在作業狀態時,舉升車架升到最高點的過程中,四連桿滑軌機構能繞著鉸接點旋轉,與舉升車架的滑軌形成一條軌道,車廂順利通過滑軌進行裝卸.在裝卸完成后,舉升液壓缸縮回,滑軌繞著鉸接點旋轉與貨物平臺呈直角,在車輛行駛的過程中充當掛車的防追尾裝置,防止小型車輛竄入車底.
1整車設計參數
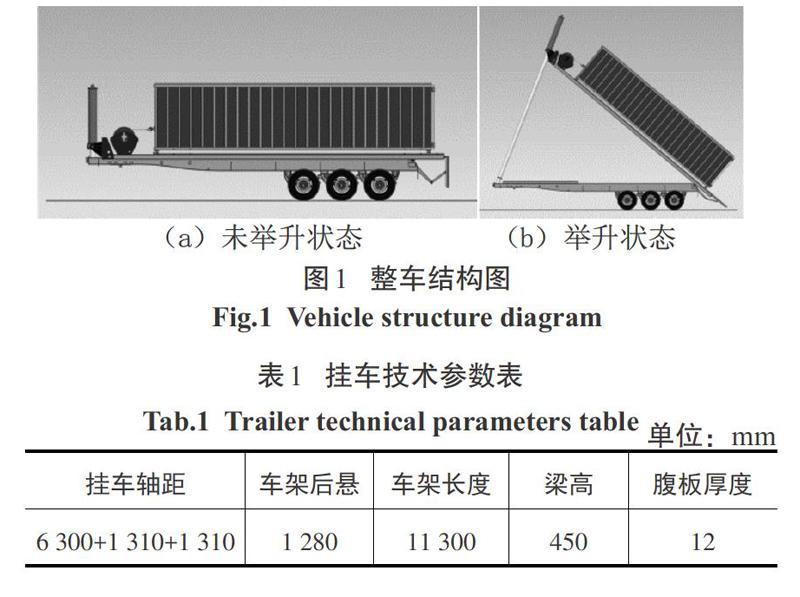
帶有四連桿滑軌機構卷揚機式自卸掛車結構示意圖如圖1所示,主要由液壓舉升系統、卷揚機、平板式掛車、貨箱和四連桿滑軌機構組成.
本車總質量限值為49 t,擬設計掛車參數見表1.
2液壓舉升機構設計
2.1?? 最大舉升角度的確定及舉升力的計算
在液壓缸頂起舉升車架后,裝載物料的貨箱可以通過自身的重力沿滑軌從車上卸下.根據常見貨物的安息角[7],本次設計的最大舉升的角度為45°.
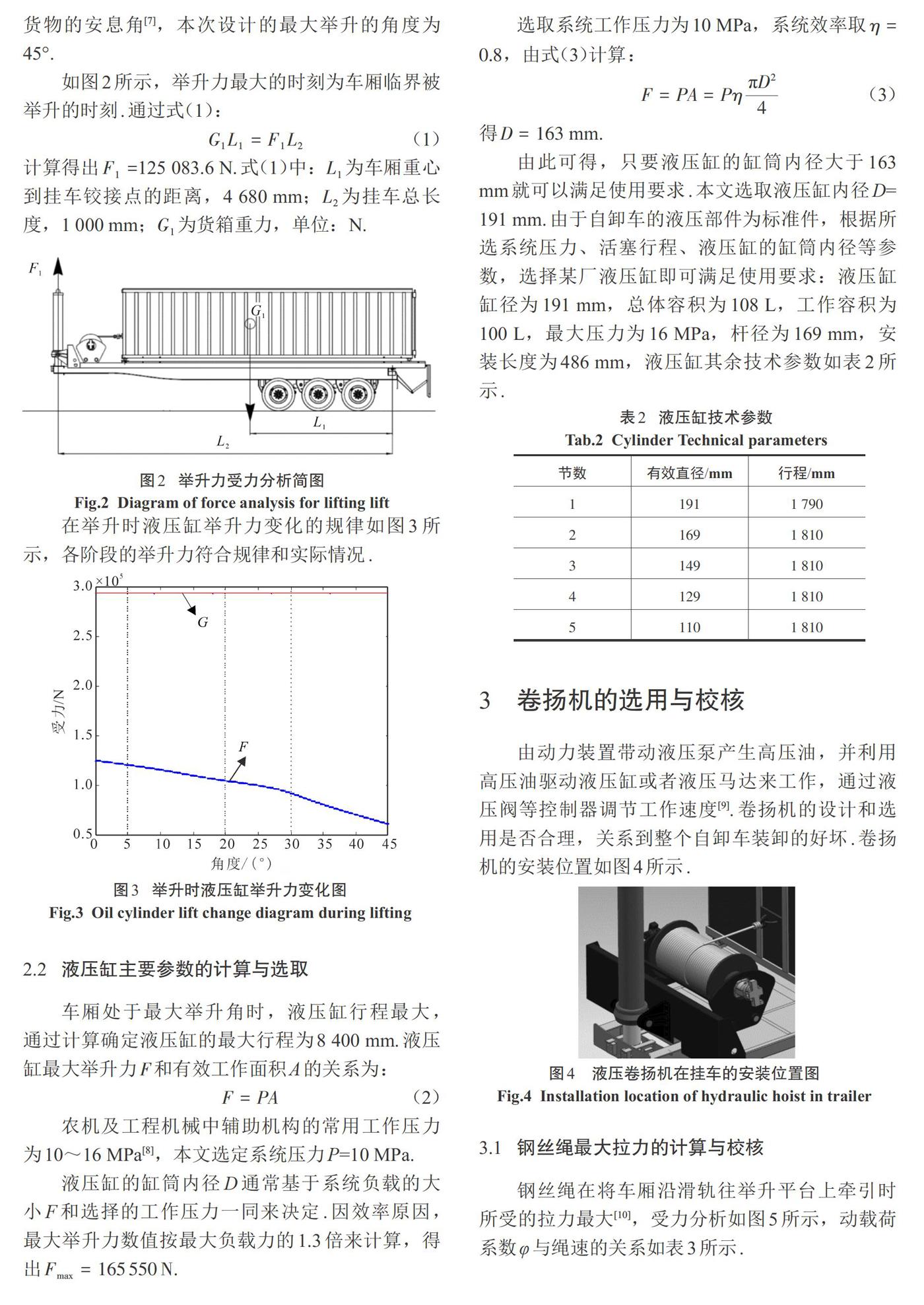
如圖2所示,舉升力最大的時刻為車廂臨界被舉升的時刻.通過式(1):
[G1L1=F1L2](1)
計算得出[F1=]125 083.6 N.式(1)中:[L1]為車廂重心到掛車鉸接點的距離,4 680 mm;[L2]為掛車總長度,1 000 mm;[G1]為貨箱重力,單位:N.
在舉升時液壓缸舉升力變化的規律如圖3所示,各階段的舉升力符合規律和實際情況.
2.2?? 液壓缸主要參數的計算與選取
車廂處于最大舉升角時,液壓缸行程最大,通過計算確定液壓缸的最大行程為8 400 mm.液壓缸最大舉升力[F]和有效工作面積A的關系為:
[F=PA](2)
農機及工程機械中輔助機構的常用工作壓力為10~16 MPa[8],本文選定系統壓力P=10 MPa.
液壓缸的缸筒內徑D通常基于系統負載的大小F和選擇的工作壓力一同來決定.因效率原因,最大舉升力數值按最大負載力的1.3倍來計算,得出[Fmax=165 550 N].
選取系統工作壓力為10 MPa,系統效率取[η=0.8],由式(3)計算:
[F=PA=PηπD24](3)
得[D=163] mm.
由此可得,只要液壓缸的缸筒內徑大于163 mm就可以滿足使用要求.本文選取液壓缸內徑D=191 mm.由于自卸車的液壓部件為標準件,根據所選系統壓力、活塞行程、液壓缸的缸筒內徑等參數,選擇某廠液壓缸即可滿足使用要求:液壓缸缸徑為191 mm,總體容積為108 L,工作容積為100 L,最大壓力為16 MPa,桿徑為169 mm,安裝長度為486 mm,液壓缸其余技術參數如表2所示.
3卷揚機的選用與校核
由動力裝置帶動液壓泵產生高壓油,并利用高壓油驅動液壓缸或者液壓馬達來工作,通過液壓閥等控制器調節工作速度[9].卷揚機的設計和選用是否合理,關系到整個自卸車裝卸的好壞.卷揚機的安裝位置如圖4所示.
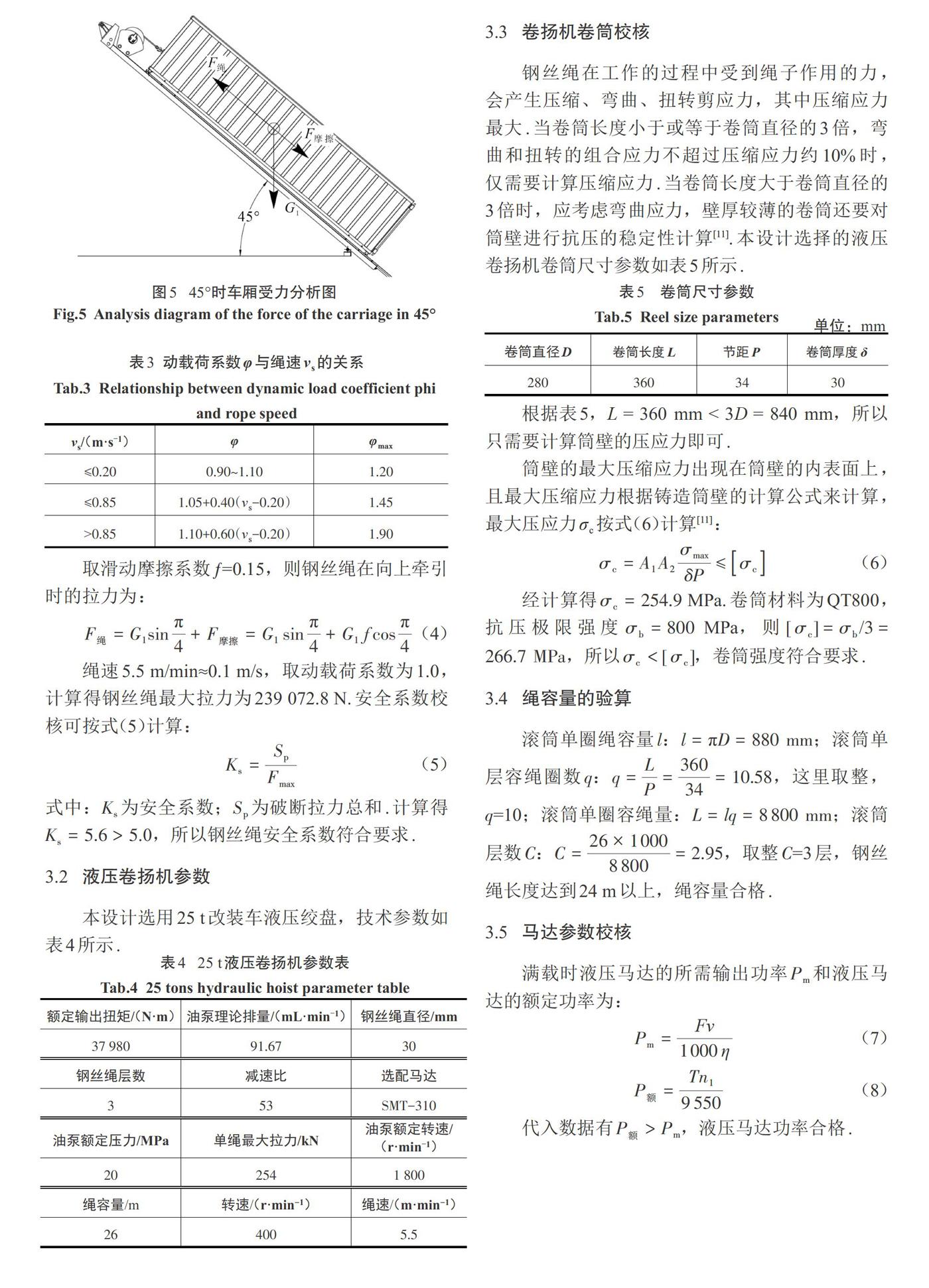
3.1?? 鋼絲繩最大拉力的計算與校核
鋼絲繩在將車廂沿滑軌往舉升平臺上牽引時所受的拉力最大[10],受力分析如圖5所示,動載荷系數φ與繩速的關系如表3所示.
4.3?? 機構的運動分析校核
將各桿件長度數據代入四連桿分析軟件中,通過主要運動參數輸出可知:輸出的機構名稱為雙搖桿機構,且最大擺角為85.43°,符合所需的預期.
通過軟件模擬路徑如圖7所示,圖為各個不同位置時的軌跡集合.通過以上動態演示可知:四桿機構的運動符合預定軌跡,并且運動狀態無干涉現象.
5結語
本文論述了一種帶有四連桿滑軌機構的卷揚機式自卸掛車,該掛車主要由液壓舉升系統、卷揚機、平板式掛車、貨箱和四連桿滑軌機構組成.文中將卷揚機應用在自卸掛車的裝卸系統中,根據卷揚機的實際工作原理,進一步計算卷揚機與掛車的匹配度,加強了自卸掛車貨箱在卸貨狀態中的穩定性;設計出自卸掛車尾部的四連桿滑軌機構,利用遺傳算法求出各桿最優解,提升了自卸掛車的工作效率和掛車尾部安全性.該機構同樣適用于二類底盤尾部和農林機械的改裝.
參考文獻
[1] GAO Q M,GAO F,TIAN L,et al.Design and development of a variable ground clearance,variable wheel track self-leveling hillside vehicle power chassis (V2-HVPC)[J].Journal of Terramechanics,2014,56:77-90.
[2] 關曲光,胡明茂,宮愛紅.基于側翻貢獻度的自卸車舉升作業側傾穩定性[J].科學技術與工程,2019,19(32):337-343.
[3] 廖子文,宮愛紅,胡明茂,等.考慮貨箱質心變化的重型自卸車舉升側翻分析[J].湖北汽車工業學院學報,2019,33(4):20-24,32.
[4] 王國安,高嶺,朱坤鵬,等.液壓油缸再制造技術可行性分析[J].廣西科技大學學報,2015,26(1):33-37.
[5] 郝妮妮,于巖,劉華偉.基于遺傳算法的重型礦用自卸車車斗優化設計[J].煤礦機械,2020,41(5):4-5.
[6] 周圓兀,韓曉偉,陳鮑.基于不平衡推力法的邊坡穩定性系數優化計算方法[J].廣西科技大學學報,2016,27(1):71-74.
[7] 王柱江.自卸車最大舉升角的確定[J].專用汽車,1999(2):13-14.
[8] 機械電子工業部洛陽拖拉機研究所.拖拉機設計手冊[M].北京:機械工業出版社,1994.
[9] 徐國坪.自卸半掛車液壓系統的設計[J].企業技術開發,2017,36(4):89-91.
[10]吳地勇.某型號隨車起重機絞盤鋼絲繩繞繩設計[J].機械工程與自動化,2016(1):203-204,207.
[11]?? 張義儒.小型卷揚機卷筒強度的計算[J].起重運輸機械,1983(7):40-44.
[12]?? 周啟興,陳濤,李兵,等.平面四桿機構的可視化設計與研究[J].南方農機,2019,50(6):11-13.
[13]?? KHORSHIDI M,SOHEILYPOUR M,PEYRO M,et al. Optimal design of four-bar mechanisms using a hybrid multi-objective GA with adaptive local search[J]. Mechanism and Machine Theory,2011,46(10):1453-1465.
Design of hoist dump trailer with rear four-bar slide rail mechanism
GAO Qiaoming1, CAO Pengcheng1, ZHANG Xing1, DENG Feiyi*1, WANG Lianqi2,
HUANG Donghui1, PAN Dong1, ZENG Junhao1
(1.School of Mechanical and Traffic Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China; 2. Guangxi Hepu County HuiLaiBao Machinery Manufacturing Co., Ltd., ?Beihai 536100, China)
Abstract: This paper presents a design of four-link sliding rail mechanism at the rear of the trailer by genetic optimization algorithm, whereas the dump truck has an unstable situation during the lifting ? process and the lack of guidance during the loading and sliding of the cargo box. Then, hydraulic ?lifting mechanism, winch, winch hydraulic loading and unloading system has been calculated and ?designed. Meanwhile, it has been concluded that the hydraulic lifting mechanism, winch system and?four-link sliding rail mechanism are more suitable for dump trailers in the theoretical method, and the four-bar slide rail mechanism are analyzed by the four-bar mechanism design software, which can be called a double rocker mechanism. Finally, the movement of the four-link slide rail mechanism has been conformed to the predetermined trajectory and has no interference phenomenon when themaximum swing angle of the four-link slide rail mechanism is 85.43° by software analysis andsimulation path.
Key words: hoist dump trailer; lifting mechanism; genetic algorithm; four-bar slide rail mechanism
(責任編輯:黎 ? 婭)
收稿日期:2020-07-12
基金項目:廣西科技計劃項目(桂科AC17129042);廣西科技大學研究生教育創新計劃項目(GKYC202004)資助.
作者簡介:高巧明,博士,高級工程師,碩士生導師,研究方向:農業機械化、智能化關鍵技術與裝備.
通信作者:鄧緋怡,助理工程師,研究方向:機械設計,E-mail:dengfeiyi151@163.com.
