重型罐車內液體晃動參數化數學模型辨識
2021-06-08 22:00:02李超吳文軍周鳳霞黃中烈高超南
廣西科技大學學報 2021年2期
李超 吳文軍 周鳳霞 黃中烈 高超南
摘? 要:液罐車在轉向或制動過程中貯箱內的液體晃動會給車輛操縱穩定性及行駛安全性帶來極大的隱患.針對此類現象,對貯箱內液體建立不含阻尼項的等效單擺模型,基于此模型推導出作用在貯箱體上帶有參數的力和力矩的表達式;利用數值仿真軟件對計算結果進行數據擬合,得到等效模型參數的等效值,使等效力學模型實現了參數化.通過不同工況下利用CFD仿真軟件進行的大量數值仿真分析,表明CFD仿真軟件與使用本文辨識方法得到的晃動力與晃動力矩結果對比吻合度較高,從而說明了使用本文所提出的方法獲得的等效力學模型具有較高的準確度.
關鍵詞:液罐車;液體晃動;等效力學模型;CFD仿真
中圖分類號:U469.61 DOI:10.16375/j.cnki.cn45-1395/t.2021.02.011
0引言
現代工業對液體燃料的需求量越來越大,促進了公路運輸業的快速發展.重型液罐車雖然作為公路運輸液體燃料的最佳選擇,但是在運輸途中由于路面的不平整度或者駕駛者的操作等不確定因素導致貯箱內液體發生晃動,液體晃動時所產生的非平衡力和力矩對貯箱及載體的穩定性造成較大的影響,給道路交通安全帶來重大的隱患[1-3].目前,對于形狀較規則的貯液罐內的液體晃動,大部分研究采用將液體晃動等效為力學模型的方法.而對于結構較復雜的貯罐,難以采用理論方法對其罐內液體晃動問題進行研究,因此,需要通過數值仿真和實驗方法對其進行研究[4-9].
在液罐車動力學分析和穩定性研究中,研究者們在不斷探求某種方便計算、精度較高的等效力學模型,從而簡化復雜、計算費時的晃動流場計算.上世紀80年代末期,丁文鏡等[10-11]利用液固耦合時運動信號中包含液體晃動力學參數的思想,將系統等效為彈簧振子模型,然后對其進行了參數辨識.周叮等[12]對圓柱形貯箱建立了等效力學模型,然后分別用諧波平衡法和廣義最小二乘法對模型參數進行辨識.夏益霖[13-14]首先利用試驗方法獲得了晃動力和力矩的頻響函數,然后將系統等效為一階單擺模型并利用頻響函數辨識出了模型中的參數.
從目前的已有研究成果來看,對罐內液體簡化等效模型的研究較為深入,但研究過程中為了使問題簡化,一般不考慮液體晃動阻尼,所以這種研究方法存在一定的局限性和不確定性.本文在考慮晃動阻尼與防晃裝置對罐體的影響基礎上,提出了一種精確、有效的時域單擺等效模型參數辨識方法.通過與時域表達式比較得到了等效力學模型中的等效參數值,然后得出完整的參數化等效力學模型.通過CFD軟件進行大量數值仿真算例計算,驗證了通過本文方法得到的等效力學模型具有較高的準確性.
1橢圓截面貯箱等效模型
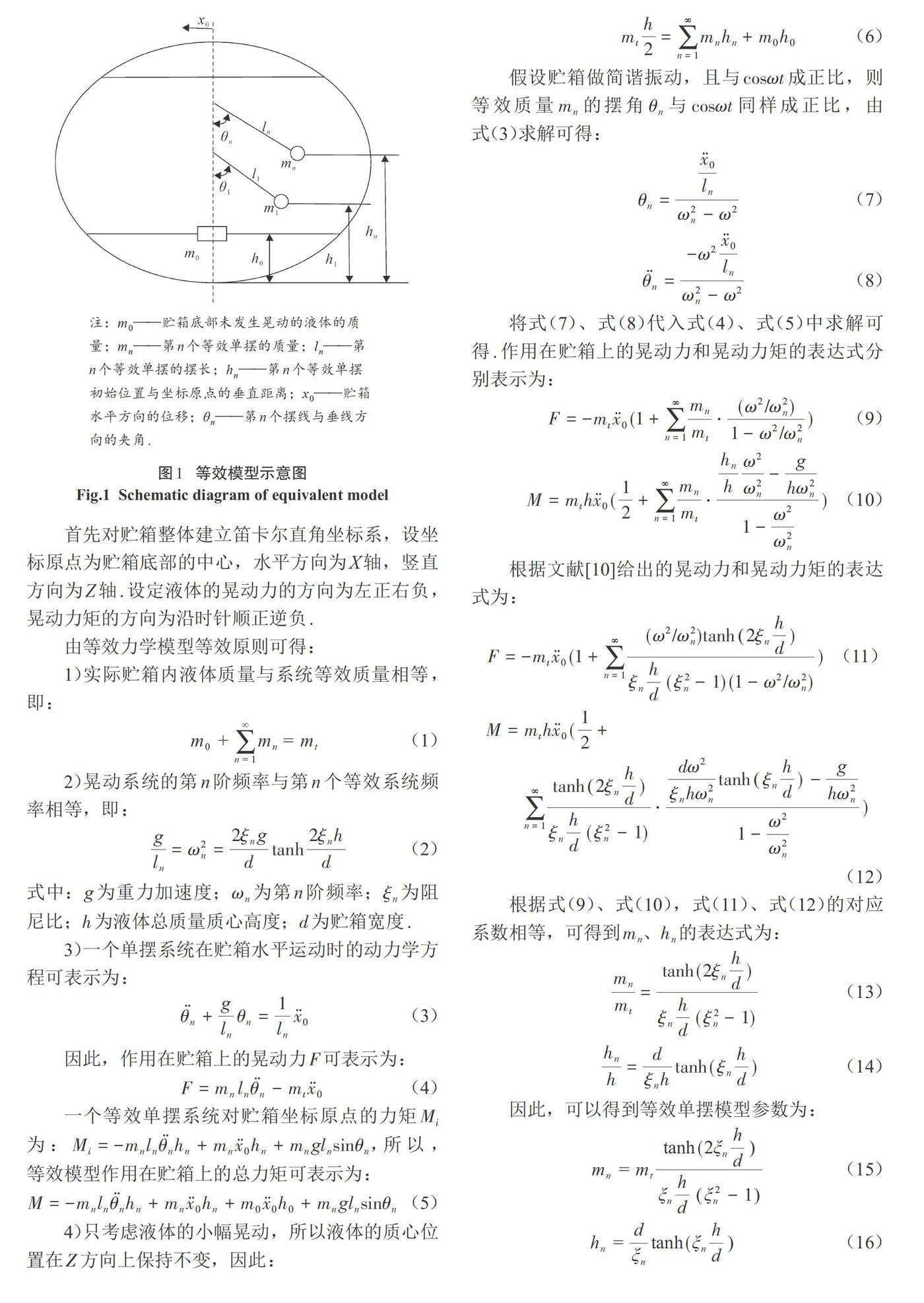
選取實際較為常見的橢圓截面貯箱為例,對其建立多階等效單擺力學模型,如圖1所示.
3算例分析
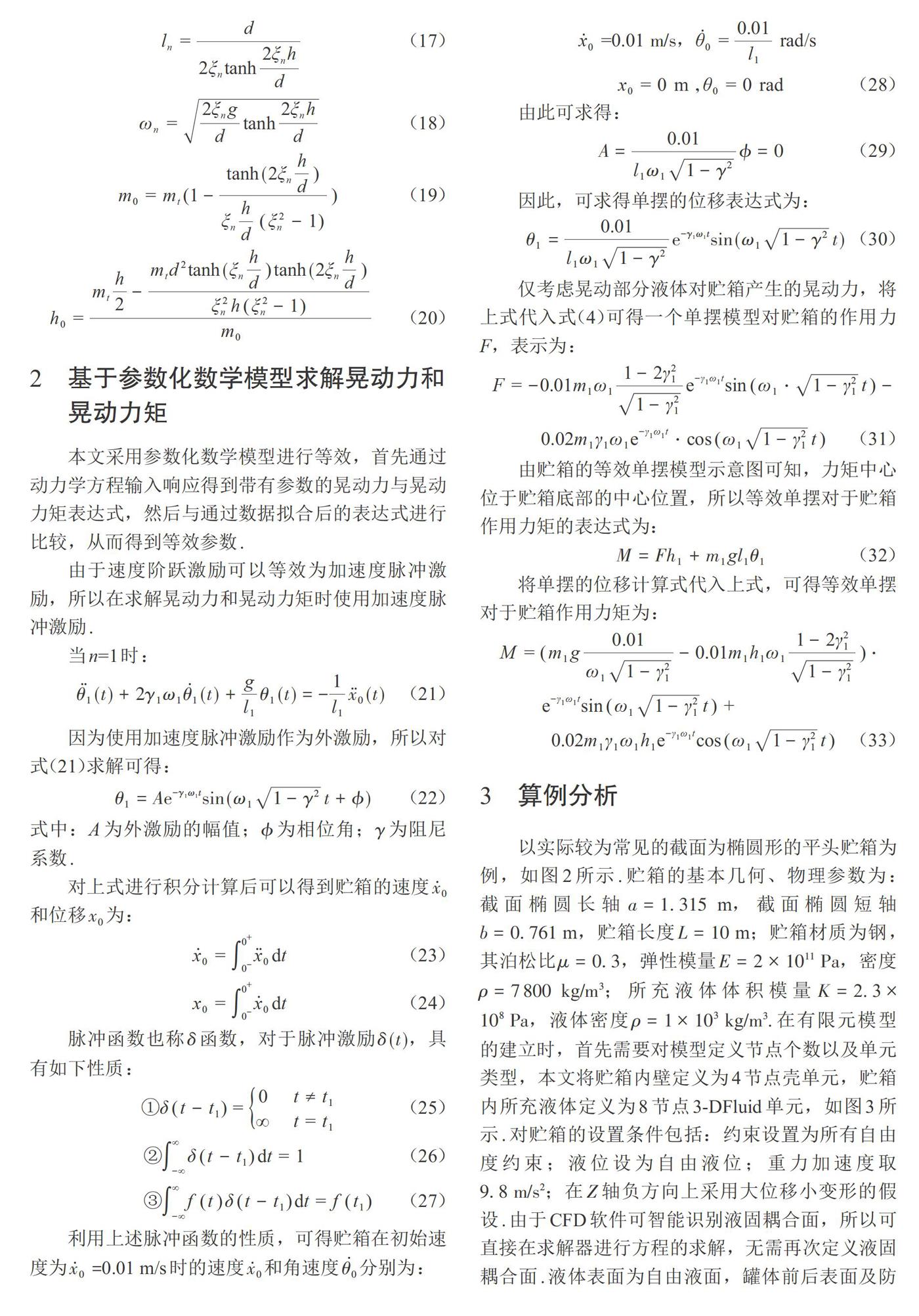
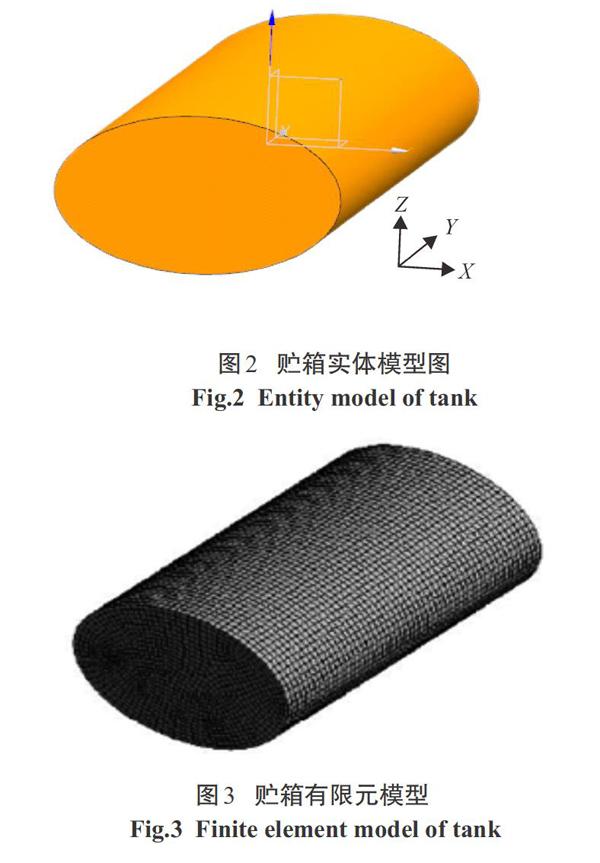
以實際較為常見的截面為橢圓形的平頭貯箱為例,如圖2所示.貯箱的基本幾何、物理參數為:截面橢圓長軸[a=1.315] m,截面橢圓短軸? ?[b=0.761] m,貯箱長度[L=10] m;貯箱材質為鋼,其泊松比[μ=0.3],彈性模量[E=2×1011 Pa],密度[ρ=7 800] [kg/m3];所充液體體積模量[K=2.3×108 Pa],液體密度[ρ=1×103] [kg/m3].在有限元模型的建立時,首先需要對模型定義節點個數以及單元類型,本文將貯箱內壁定義為4節點殼單元,貯箱內所充液體定義為8節點3-DFluid單元,如圖3所示.對貯箱的設置條件包括:約束設置為所有自由度約束;液位設為自由液位;重力加速度取 [9.8] [m/s2];在[Z]軸負方向上采用大位移小變形的假設.由于CFD軟件可智能識別液固耦合面,所以可直接在求解器進行方程的求解,無需再次定義液固耦合面.液體表面為自由液面,罐體前后表面及防晃板表面均采用Wall邊界條件,罐體橢圓面采用Moving-Wall邊界條件.
為了驗證貯箱靜力分析結果的準確性,需要對液體壓強云圖進行分析.將壓強云圖從結果中提取出來,如圖4所示.圖中省略了貯箱外殼和隔板部分,只顯示了液體部分,以便更清晰地觀察云圖.由壓強云圖可以看出,貯箱內液體的自由液面處的壓強最小,其值為-11.9 Pa;隨著充液深度的降低,液體壓強逐漸變大,距離貯箱底部位置越近的液體壓強越大,最大壓強為8 634 Pa.根據液體壓強公式[Pmax=ρgh],求得貯箱內液體最大壓強為?? 8 632.9 Pa,兩種結果在數值上基本一致,說明了有限元模型以及CFD仿真分析具有較高的正確性和可靠性.
在上述建立的有限元模型下,對貯箱進行液體自由晃動分析,初始條件為0.01~0.10 m/s.在CFD軟件仿真計算結果中,晃動力和晃動力矩的結果如圖5所示.將其數據保存為文本格式,然后使用matlab軟件對其進行數據擬合,擬合結果如圖6所示.
將通過識別得到的等效模型參數代入Lagrange方程進行求解,然后將得出的結果與CFD仿真軟件得出的結果進行對比,其中晃動力與晃動力矩的對比示意圖如圖8—圖10所示.
從圖8—圖10對比可以看出,利用等效力學模型計算得到的結果與CFD軟件仿真結果吻合度較高,差距較小,說明了通過本文辨識方法得到的等效參數的準確性和可靠性.
4結論
本文應用CFD軟件對貯罐內液體晃動進行數值仿真,通過MATLAB軟件進行擬合,在時域內進行等效參數辨識,得到了等效模型參數,通過算例分析,驗證了方法的正確性.
通過對截面為橢圓形的平頭貯箱內液體晃動進行數值和仿真研究,表明貯箱內液體一階晃動模態是影響晃動動力學行為的占優模態,所以在液體晃動研究時應著重研究一階晃動.
基于本文所提出的等效力學模型參數辨識方法,能夠為實現充液貯箱內液體晃動系統參數的在線實時反饋和運載工具整體系統的動力學與控制等問題的研究提供可靠的理論基礎.
參考文獻
[1] 陳曉勇,施式亮,任競舟,等. 2013~2014年我國道路危險化學品運輸事故統計分析及對策[J].湖南科技大學學報(自然科學版),2017,32(3):91-95.
[2] 趙偉強,凌錦鵬,宗長富. 半掛式液罐車防側翻控制策略開發[J].汽車工程,2019,41(1):50-56.
[3] 占小跳. LNG槽罐車公路運輸危險性分析及安全對策措施[J].公路交通科技(應用技術版),2017,13(2):288-290.
[4] SANAPALA V S,RAJKUMAR M,VELUSAMY K,et al. Numerical simulation of parametric liquid sloshing in a horizontally baffled rectangular container[J]. Journal of Fluids and Structures,2018,76:229-250.
[5] 黃中烈. 帶貯罐類重型車輛動力學建模與剛-液耦合特性研究[D].柳州:廣西科技大學,2019.
[6] 姜杉.汽車罐車罐內液體側向沖擊研究[D].長春:吉林大學,2017.
[7] 萬瀅,趙偉強,封冉,等.車-液耦合動力學建模及液體響應成分對操縱性的影響[J].吉林大學學報(工學版),2017,47(2):353-364.
[8] 杜林霏.獲取液體晃動等效模型參數的虛擬實驗方法[C]//北京力學會第20屆學術年會,北京,2014.
[9] 周鳳霞,吳文軍,王佐,等. 帶貯罐類重型車輛建模與操縱穩定性研究[J].廣西科技大學學報,2020,31(2):68-79.
[10]?? 丁文鏡,吳學森.辨識液體晃動力學參數的頻域法[J].宇航學報,1991,12(3):68-75.
[11]?? 丁文鏡,周叮.液體晃動力學參數的辨識[J].清華大學學報(自然科學版),1989(5):96-102.
[12]?? 周叮,丁文鏡.貯箱內液體晃動特性及其力學參數的識別問題[J].強度與環境,1990(3):14-25.
[13]?? 夏益霖.液體晃動等效力學模型的參數識別[J].應用力學學報,1991(4):27-35.
[14]?? 夏益霖.分隔貯箱內液體晃動參數的識別方法[J].宇航學報,1997,18(1):116-119.
Parameter identification of equivalent mechanical model of liquid sloshing in tank truck
LI Chao, WU Wenjun*, ZHOU Fengxia, HUANG Zhonglie, GAO chaonan
(1.School of Mechanical and Traffic Engineering, Guangxi University of Science and Technology, Liuzhou 545006, China;2. Guangxi Key Laboratory of Automobile Componment ?and ?Vehicle Technology(Guangxi University ?of Science and Technology),Liuzhou 545006,China)
Abstract: Great hidden danger to the handling stability and driving safety is caused by liquid sloshing in the tank caused by steering or braking process of the tanker. Aiming at this, a equivalent simple pendulum model for the liquid in the tank, without damping terms, is established. Based on the ?equivalent simple model, the expressions of sloshing force and sloshing torque on the tank with parameters are derived. The numerical simulation software is used to match the calculated results. The values of the equivalent model parameters are obtained, by which the equivalent mechanical model is parameterized. Large number of simulation examples are calculated under different working conditions with CFD simulation software. The comparison of sloshing force and torque between the result of CFD simulation software and the results obtained by the identification method presented in this paper shows the equivalent mechanical model obtained by using the method proposed has high accuracy.
Key words: tank truck; liquid sloshing; equivalent mechanical model; CFD simulation
(責任編輯:黎 ? 婭)
收稿日期:2020-10-18
基金項目:廣西自然科學基金項目(2017JJA110669Y);廣西高校中青年教師基礎能力提升項目(2017KY0350);廣西科技大學博士基金項目(校科博17Z01);廣西科技大學研究生教育創新計劃項目(GKYC201913)資助.
作者簡介:李超,碩士研究生.
通信作者:吳文軍,博士,副教授,碩士研究生導師,研究方向:復雜充液系統耦合動力學與控制研究,E-mail:wuwenjun25@163.com.
