一種基于長(zhǎng)短記憶模型的交通軌跡異常挖掘模型
2021-06-08 22:00:02秦勝君李婷
廣西科技大學(xué)學(xué)報(bào) 2021年2期
關(guān)鍵詞:深度學(xué)習(xí)
秦勝君 李婷
摘? 要:針對(duì)現(xiàn)有異常軌跡檢測(cè)方法沒(méi)有捕捉軌跡數(shù)據(jù)時(shí)序特征,不能有效識(shí)別業(yè)務(wù)異常和新型異常等問(wèn)題,提出基于長(zhǎng)短記憶模型的異常軌跡挖掘模型.首先通過(guò)優(yōu)化長(zhǎng)短記憶模型進(jìn)行軌跡預(yù)測(cè),然后基于進(jìn)化理論將預(yù)測(cè)軌跡轉(zhuǎn)化為異常軌跡,從而構(gòu)建了基于長(zhǎng)短記憶模型的異常判別模型.該模型可以有效地識(shí)別業(yè)務(wù)異常和新型異常,提高了異常檢測(cè)的精準(zhǔn)度和可擴(kuò)展性,同時(shí)適用于無(wú)標(biāo)簽數(shù)據(jù),解決了傳統(tǒng)神經(jīng)網(wǎng)絡(luò)必須應(yīng)用于有監(jiān)督學(xué)習(xí)的問(wèn)題.最后通過(guò)與改進(jìn)的密度聚類(lèi)算法和馬爾科夫過(guò)程的對(duì)比實(shí)驗(yàn)驗(yàn)證了該模型在交通軌跡異常檢測(cè)的優(yōu)越性.
關(guān)鍵詞:長(zhǎng)短記憶模型;異常軌跡;交通大數(shù)據(jù);深度學(xué)習(xí)
中圖分類(lèi)號(hào):TP273;U491? DOI:10.16375/j.cnki.cn45-1395/t.2021.02.010
0引言
隨著傳感器網(wǎng)絡(luò)和無(wú)線(xiàn)通信等新興技術(shù)的不斷發(fā)展,越來(lái)越多的軌跡數(shù)據(jù)被收集和保存,軌跡數(shù)據(jù)挖掘有助于找出移動(dòng)對(duì)象隱藏的模式信息或行為意圖[1].異常軌跡數(shù)據(jù)挖掘是指識(shí)別隱藏在正常軌跡數(shù)據(jù)中的異常軌跡.異常軌跡不同于噪聲點(diǎn),噪聲點(diǎn)會(huì)干擾挖掘工作,降低結(jié)果的有效性,而異常軌跡可能預(yù)示著有趣事件的發(fā)生,比如公共安全中的突發(fā)事件、交通事故、高速逃費(fèi)行為等,從而具有更高的研究?jī)r(jià)值[2].
根據(jù)實(shí)現(xiàn)方法的不同,異常軌跡檢測(cè)方法可以分為4類(lèi):基于聚類(lèi)的檢測(cè)方法、基于網(wǎng)格的檢測(cè)方法、 基于分類(lèi)的檢測(cè)方法、基于統(tǒng)計(jì)學(xué)的檢測(cè)方法.
基于聚類(lèi)的檢測(cè)方法是使用密度聚類(lèi)、模糊聚類(lèi)等方法,發(fā)現(xiàn)遠(yuǎn)離主體軌跡的少部分軌跡.例如,文獻(xiàn)[3]先對(duì)軌跡進(jìn)行切分分組,然后使用密度聚類(lèi)方法找出異常軌跡.何明等[4]提出改進(jìn)密度聚類(lèi)與模式信息挖掘的異常軌跡識(shí)別方法,結(jié)合上海市與北京市出租車(chē)軌跡進(jìn)行實(shí)驗(yàn),驗(yàn)證了該算法的有效性.
基于網(wǎng)格的檢測(cè)方法是將城市路網(wǎng)劃分成均等大小的網(wǎng)格單元,從而識(shí)別出異常的網(wǎng)格單元序列.主要的實(shí)現(xiàn)方法有基于似然比統(tǒng)計(jì)量的檢測(cè)方法[5]和基于隔離機(jī)制的異常檢測(cè)方法[6].也有學(xué)者提出路網(wǎng)空間下基于馬爾科夫決策過(guò)程的異常軌跡檢測(cè)方法[7].
基于分類(lèi)的檢測(cè)方法是使用有監(jiān)督的分類(lèi)方法識(shí)別正常軌跡和異常軌跡.如俞慶英等[8]提出基于BP神經(jīng)網(wǎng)絡(luò)的異常軌跡檢測(cè)方法.Li等[9]使用支持向量機(jī)進(jìn)行特征學(xué)習(xí),該方法可處理高維特征空間的異常檢測(cè).
基于統(tǒng)計(jì)學(xué)的檢測(cè)方法是應(yīng)用統(tǒng)計(jì)學(xué)相關(guān)理論進(jìn)行異常檢測(cè).例如,安計(jì)勇等[10]提出一種多因素異常檢測(cè)集成算法.首先通過(guò)統(tǒng)計(jì)數(shù)據(jù)分布給每種特征賦予一個(gè)異常分值,然后利用組合函數(shù)對(duì)分值集成,由此進(jìn)行最終異常檢測(cè).汪霜霜等[11]研究了一種車(chē)輛軌跡學(xué)習(xí)自適應(yīng)稀疏重構(gòu)方法,以識(shí)別一場(chǎng)車(chē)輛運(yùn)動(dòng)模式.
綜上所述,異常軌跡領(lǐng)域已有很多研究成果,為數(shù)據(jù)挖掘和智能交通提供了重要的理論基礎(chǔ)和應(yīng)用支撐.但是上述研究存在以下兩個(gè)問(wèn)題:1)基于聚類(lèi)或分類(lèi)的方法都沒(méi)有考慮時(shí)序問(wèn)題,交通軌跡是時(shí)序數(shù)據(jù),分析軌跡時(shí)序有助于提高異常檢測(cè)有效性;2)業(yè)務(wù)異常問(wèn)題,現(xiàn)有的方法大多是根據(jù)歷史數(shù)據(jù)中正常軌跡和異常軌跡的距離來(lái)判斷是否異常,但是并沒(méi)有考慮過(guò)業(yè)務(wù)異常問(wèn)題,因此無(wú)法有效識(shí)別業(yè)務(wù)異常.為解決上述問(wèn)題,本文提出基于長(zhǎng)短記憶模型的異常軌跡檢測(cè)方法.首先優(yōu)化長(zhǎng)短記憶模型預(yù)測(cè)下一階段軌跡,在已預(yù)測(cè)出的軌跡數(shù)據(jù)中進(jìn)行特征值的變異從而形成異常軌跡,再將正常軌跡和異常軌跡輸入神經(jīng)網(wǎng)絡(luò)模型進(jìn)行訓(xùn)練,最終形成基于長(zhǎng)短記憶模型的異常軌跡檢測(cè)方法.該模型解決了傳統(tǒng)算法在識(shí)別業(yè)務(wù)異常時(shí)需要大量有標(biāo)簽數(shù)據(jù)的問(wèn)題,并且在異常檢測(cè)時(shí)加入變異因子,提高了模型在識(shí)別新型異常時(shí)的有效性.
1相關(guān)定義
車(chē)輛行駛軌跡本質(zhì)是多屬性的時(shí)間空間點(diǎn)序列,聚類(lèi)等方法是使用距離來(lái)判別異常,該方法可以有效地判別數(shù)值異常,也就是在數(shù)值上偏離大部分軌跡的異常軌跡,而無(wú)法判斷業(yè)務(wù)異常. 比如高速路上大貨車(chē)的行駛軌跡,兩段路程中車(chē)輛載重變化在核定載重范圍內(nèi)浮動(dòng)都屬正常,但是速度變化過(guò)大則有可能是超速,屬于異常事件,因此不能僅僅以?xún)蓷l軌跡的距離來(lái)判斷是否異常,以非線(xiàn)性的判別方式更符合需求.
1.1?? 軌跡基本定義
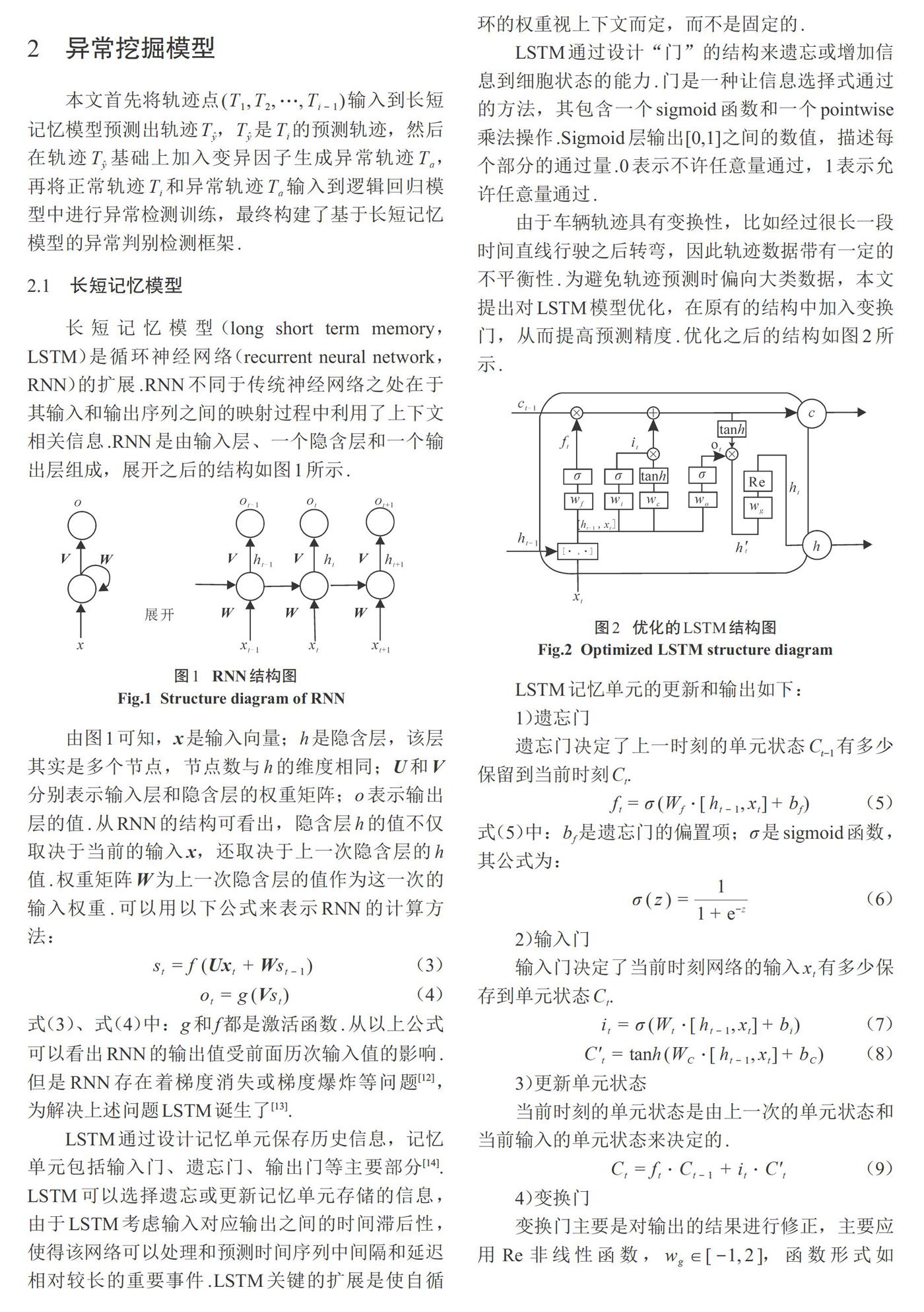
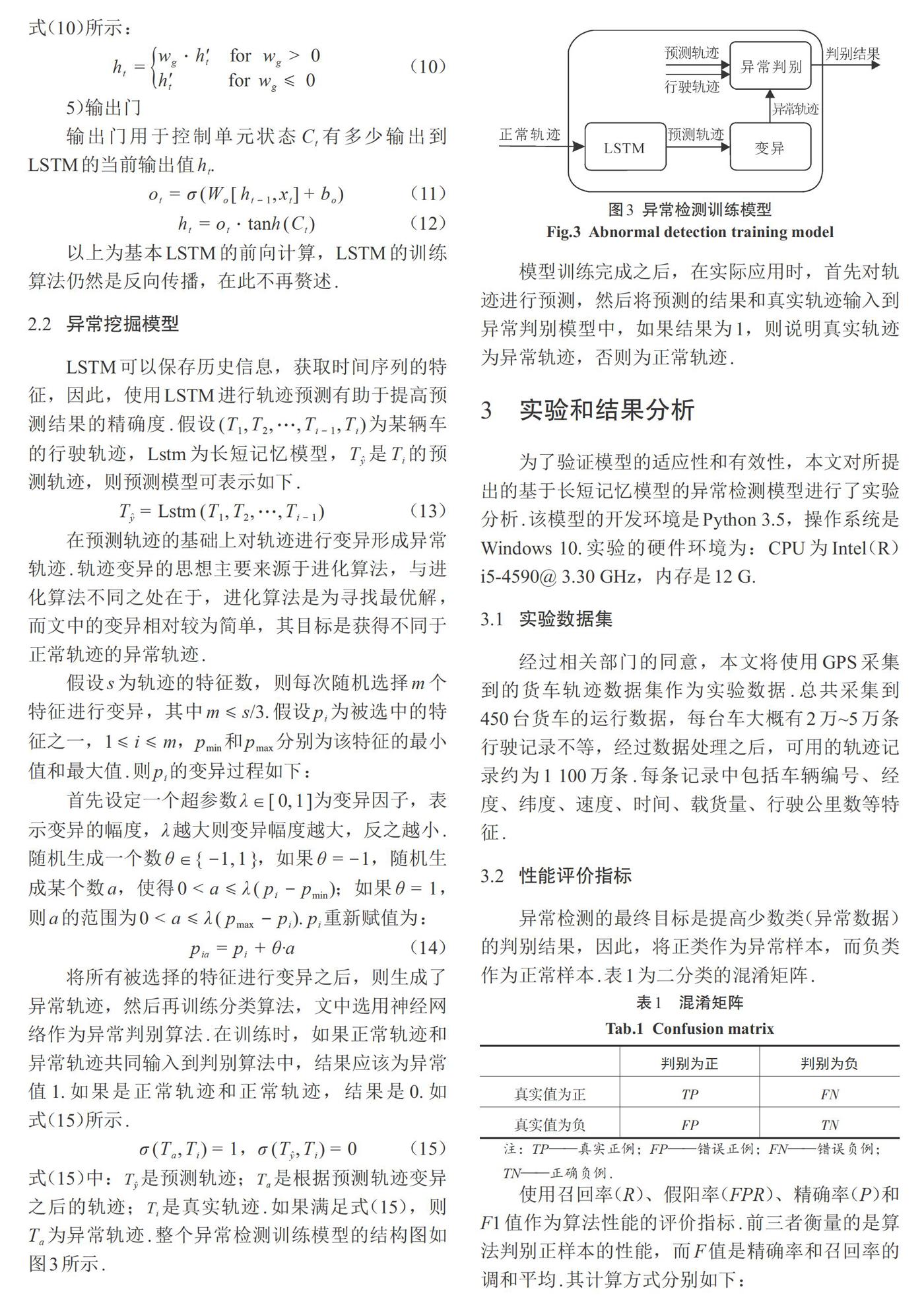
軌跡數(shù)據(jù)集中包含多輛車(chē)的多條軌跡.假設(shè)車(chē)輛軌跡數(shù)據(jù)集[CTD={CT1, CT2, …, CTi, …, CTn}],[i=0, 1, …, n].每輛車(chē)的軌跡數(shù)據(jù)集合可以表示為:[CTi={Ti1, Ti2, …, Tij, …, Tim}],[j=0, 1, …, m].單條軌跡[T]又包含相關(guān)特征,表示為:[Tj=(pj1, pj2, …, pjs, tj)],[t0 軌跡[T]包含地理位置、速度、平均速度、時(shí)長(zhǎng)、載重等相關(guān)特征. 1)地理位置:該特征表明車(chē)輛的行駛路線(xiàn),可能是車(chē)輛所在的經(jīng)緯度,也可以是車(chē)輛的出發(fā)地點(diǎn).地理位置標(biāo)志著車(chē)輛在運(yùn)動(dòng)空間內(nèi)的位置移動(dòng)情況. 2)速度:速度指的是在某個(gè)時(shí)刻車(chē)輛的行駛速度,一般是使用GPS等設(shè)備采集. 3)平均速度:該特征表示在某一段時(shí)間內(nèi)車(chē)輛運(yùn)行的平均速度. 4)時(shí)長(zhǎng):表明車(chē)輛從軌跡的出發(fā)點(diǎn)到某個(gè)位置的行駛時(shí)長(zhǎng). 5)載重:表示車(chē)輛所載重量.比如高速路上貨車(chē)的載重量是判斷異常的指標(biāo)之一;出租車(chē)是否載人也有助于判斷出租車(chē)軌跡是否異常. 除上述特征之外,還有加速度、轉(zhuǎn)角等可用于識(shí)別軌跡異常,根據(jù)實(shí)際情況不同,可選擇不同的特征. 1.2?? 異常相關(guān)定義 文中根據(jù)軌跡異常情況不同,將異常分為數(shù)值異常和業(yè)務(wù)異常. 1)數(shù)值異常 數(shù)值異常(data anomaly,DA)也可稱(chēng)為線(xiàn)性異常,指與正常軌跡的距離超過(guò)某個(gè)閾值的異常軌跡.可如下定義: [Ti-Ta≥Av]? (1) 式(1)中:假設(shè)[Ti]為正常軌跡,[Av]為設(shè)定的閾值,[·]為距離度量,可以是歐式距離或者Hausdorff等距離度量方式.如果兩條軌跡滿(mǎn)足式(1),則[Ta]為數(shù)值異常軌跡. 在實(shí)際業(yè)務(wù)中,有可能出現(xiàn)距離度量無(wú)法判別異常軌跡.例如一輛貨車(chē)在高速公路的正常行駛軌跡為120 km/h,載重20 t,該軌跡可表述為(120,20).假如軌跡變換為(120,40),沒(méi)有超出載重范圍,因此該軌跡仍然為正常軌跡,但是如果軌跡變?yōu)椋?40,20),則被認(rèn)為是超速,視為不安全駕駛行為,由此該軌跡檢測(cè)為異常軌跡.雖然上述假設(shè)的兩條軌跡與原始軌跡的距離一樣,但是前者為正常,后者為異常.文中將此類(lèi)異常定義為業(yè)務(wù)異常. 2)業(yè)務(wù)異常 業(yè)務(wù)異常(business anomaly,BA)也可稱(chēng)為非線(xiàn)性異常,指正常軌跡和異常軌跡經(jīng)過(guò)某個(gè)非線(xiàn)性函數(shù)映射為指定值,例如1或者0.文中設(shè)置1為異常值,而0為正常值.于是,業(yè)務(wù)異常可定義如下: [F(Ta)=1],[F(Ti)=0](2) 式(2)中:[F]為非線(xiàn)性函數(shù);[Ti]為正常軌跡.如果滿(mǎn)足式(2),則[Ta]為業(yè)務(wù)異常軌跡. 識(shí)別業(yè)務(wù)異常類(lèi)似于分類(lèi)算法,但是和分類(lèi)不同之處在于,一方面異常數(shù)據(jù)大多是無(wú)標(biāo)簽數(shù)據(jù),而且異常數(shù)據(jù)量較少.另一方面,業(yè)務(wù)異常是從數(shù)值上變換而來(lái),通過(guò)業(yè)務(wù)分析也可以捕捉到業(yè)務(wù)異常,此方法比有監(jiān)督的分類(lèi)算法更靈活,更適合于快速變換的數(shù)據(jù)模式.由于業(yè)務(wù)異常分析比分類(lèi)或數(shù)值異常更復(fù)雜,因此需要進(jìn)行深入研究,建立有效的異常判別模型. 2異常挖掘模型 本文首先將軌跡點(diǎn)[(T1, T2, …, Ti-1)]輸入到長(zhǎng)短記憶模型預(yù)測(cè)出軌跡[Ty],[Ty]是[Ti]的預(yù)測(cè)軌跡,然后在軌跡[Ty]基礎(chǔ)上加入變異因子生成異常軌跡[Ta],再將正常軌跡[Ti]和異常軌跡[Ta]輸入到邏輯回歸模型中進(jìn)行異常檢測(cè)訓(xùn)練,最終構(gòu)建了基于長(zhǎng)短記憶模型的異常判別檢測(cè)框架. 2.1長(zhǎng)短記憶模型 長(zhǎng)短記憶模型(long short term memory,LSTM)是循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network,RNN)的擴(kuò)展.RNN不同于傳統(tǒng)神經(jīng)網(wǎng)絡(luò)之處在于其輸入和輸出序列之間的映射過(guò)程中利用了上下文相關(guān)信息.RNN是由輸入層、一個(gè)隱含層和一個(gè)輸出層組成,展開(kāi)之后的結(jié)構(gòu)如圖1所示. 由圖1可知,[x]是輸入向量;h是隱含層,該層其實(shí)是多個(gè)節(jié)點(diǎn),節(jié)點(diǎn)數(shù)與h的維度相同;[U]和[V]分別表示輸入層和隱含層的權(quán)重矩陣;[o]表示輸出層的值.從RNN的結(jié)構(gòu)可看出,隱含層h的值不僅取決于當(dāng)前的輸入[x],還取決于上一次隱含層的h值.權(quán)重矩陣[W]為上一次隱含層的值作為這一次的輸入權(quán)重.可以用以下公式來(lái)表示RNN的計(jì)算方法: [st=f(Uxt+Wst-1)]?? (3) [ot=g(Vst)]?? (4) 式(3)、式(4)中:[g]和[f]都是激活函數(shù).從以上公式可以看出RNN的輸出值受前面歷次輸入值的影響.但是RNN存在著梯度消失或梯度爆炸等問(wèn)題[12],為解決上述問(wèn)題LSTM誕生了[13]. LSTM通過(guò)設(shè)計(jì)記憶單元保存歷史信息,記憶單元包括輸入門(mén)、遺忘門(mén)、輸出門(mén)等主要部分[14].LSTM可以選擇遺忘或更新記憶單元存儲(chǔ)的信息,由于LSTM考慮輸入對(duì)應(yīng)輸出之間的時(shí)間滯后性,使得該網(wǎng)絡(luò)可以處理和預(yù)測(cè)時(shí)間序列中間隔和延遲相對(duì)較長(zhǎng)的重要事件.LSTM關(guān)鍵的擴(kuò)展是使自循環(huán)的權(quán)重視上下文而定,而不是固定的. LSTM通過(guò)設(shè)計(jì)“門(mén)”的結(jié)構(gòu)來(lái)遺忘或增加信息到細(xì)胞狀態(tài)的能力.門(mén)是一種讓信息選擇式通過(guò)的方法,其包含一個(gè)sigmoid函數(shù)和一個(gè)pointwise乘法操作.Sigmoid層輸出[0,1]之間的數(shù)值,描述每個(gè)部分的通過(guò)量.0表示不許任意量通過(guò),1表示允許任意量通過(guò). 由于車(chē)輛軌跡具有變換性,比如經(jīng)過(guò)很長(zhǎng)一段時(shí)間直線(xiàn)行駛之后轉(zhuǎn)彎,因此軌跡數(shù)據(jù)帶有一定的不平衡性.為避免軌跡預(yù)測(cè)時(shí)偏向大類(lèi)數(shù)據(jù),本文提出對(duì)LSTM模型優(yōu)化,在原有的結(jié)構(gòu)中加入變換門(mén),從而提高預(yù)測(cè)精度.優(yōu)化之后的結(jié)構(gòu)如圖2所示. 2.2?? 異常挖掘模型 LSTM可以保存歷史信息,獲取時(shí)間序列的特征,因此,使用LSTM進(jìn)行軌跡預(yù)測(cè)有助于提高預(yù)測(cè)結(jié)果的精確度.假設(shè)[(T1, T2, …, Ti-1, Ti)]為某輛車(chē)的行駛軌跡,Lstm為長(zhǎng)短記憶模型,[Ty]是[Ti]的預(yù)測(cè)軌跡,則預(yù)測(cè)模型可表示如下. [Ty=Lstm(T1, T2, …, Ti-1)]?? (13) 在預(yù)測(cè)軌跡的基礎(chǔ)上對(duì)軌跡進(jìn)行變異形成異常軌跡.軌跡變異的思想主要來(lái)源于進(jìn)化算法,與進(jìn)化算法不同之處在于,進(jìn)化算法是為尋找最優(yōu)解,而文中的變異相對(duì)較為簡(jiǎn)單,其目標(biāo)是獲得不同于正常軌跡的異常軌跡. 假設(shè)s為軌跡的特征數(shù),則每次隨機(jī)選擇m個(gè)特征進(jìn)行變異,其中[m≤s/3].假設(shè)[pi]為被選中的特征之一,[1≤i≤m],[pmin]和[pmax]分別為該特征的最小值和最大值.則[pi]的變異過(guò)程如下: 首先設(shè)定一個(gè)超參數(shù)[λ∈[0, 1]]為變異因子,表示變異的幅度,[λ]越大則變異幅度越大,反之越小.隨機(jī)生成一個(gè)數(shù)[θ∈{-1, 1}],如果[θ=-1],隨機(jī)生成某個(gè)數(shù)[a],使得[0 [pia=pi+θ·a](14) 將所有被選擇的特征進(jìn)行變異之后,則生成了異常軌跡,然后再訓(xùn)練分類(lèi)算法,文中選用神經(jīng)網(wǎng)絡(luò)作為異常判別算法.在訓(xùn)練時(shí),如果正常軌跡和異常軌跡共同輸入到判別算法中,結(jié)果應(yīng)該為異常值1.如果是正常軌跡和正常軌跡,結(jié)果是0.如 式(15)所示. [σ(Ta, Ti)=1],[σ(Ty, Ti)=0]? (15) 式(15)中:[Ty]是預(yù)測(cè)軌跡;[Ta]是根據(jù)預(yù)測(cè)軌跡變異之后的軌跡;[Ti]是真實(shí)軌跡.如果滿(mǎn)足式(15),則[Ta]為異常軌跡.整個(gè)異常檢測(cè)訓(xùn)練模型的結(jié)構(gòu)圖如圖3所示. 模型訓(xùn)練完成之后,在實(shí)際應(yīng)用時(shí),首先對(duì)軌跡進(jìn)行預(yù)測(cè),然后將預(yù)測(cè)的結(jié)果和真實(shí)軌跡輸入到異常判別模型中,如果結(jié)果為1,則說(shuō)明真實(shí)軌跡為異常軌跡,否則為正常軌跡. 3實(shí)驗(yàn)和結(jié)果分析 為了驗(yàn)證模型的適應(yīng)性和有效性,本文對(duì)所提出的基于長(zhǎng)短記憶模型的異常檢測(cè)模型進(jìn)行了實(shí)驗(yàn)分析.該模型的開(kāi)發(fā)環(huán)境是Python 3.5,操作系統(tǒng)是Windows 10.實(shí)驗(yàn)的硬件環(huán)境為:CPU為Intel(R)i5-4590@ 3.30 GHz,內(nèi)存是12 G. 3.1?? 實(shí)驗(yàn)數(shù)據(jù)集 經(jīng)過(guò)相關(guān)部門(mén)的同意,本文將使用GPS采集到的貨車(chē)軌跡數(shù)據(jù)集作為實(shí)驗(yàn)數(shù)據(jù).總共采集到450臺(tái)貨車(chē)的運(yùn)行數(shù)據(jù),每臺(tái)車(chē)大概有2萬(wàn)~5萬(wàn)條行駛記錄不等,經(jīng)過(guò)數(shù)據(jù)處理之后,可用的軌跡記錄約為1 100萬(wàn)條.每條記錄中包括車(chē)輛編號(hào)、經(jīng)度、緯度、速度、時(shí)間、載貨量、行駛公里數(shù)等特征. 3.2?? 性能評(píng)價(jià)指標(biāo) 異常檢測(cè)的最終目標(biāo)是提高少數(shù)類(lèi)(異常數(shù)據(jù))的判別結(jié)果,因此,將正類(lèi)作為異常樣本,而負(fù)類(lèi)作為正常樣本.表1為二分類(lèi)的混淆矩陣. 使用召回率(R)、假陽(yáng)率(FPR)、精確率(P)和F1值作為算法性能的評(píng)價(jià)指標(biāo).前三者衡量的是算法判別正樣本的性能,而F值是精確率和召回率的調(diào)和平均.其計(jì)算方式分別如下: [R=TPTP+FN][FPR=FPFP+TN] [P=TPFP+TP] [F1=2PRP+R] 3.3?? 結(jié)果分析 文中隨機(jī)選擇了350輛車(chē)的數(shù)據(jù)作為訓(xùn)練樣本,100輛車(chē)作為測(cè)試樣本.首先通過(guò)實(shí)驗(yàn)驗(yàn)證了模型的性能,然后對(duì)本異常檢測(cè)方法和聚類(lèi)進(jìn)行了性能比較.實(shí)驗(yàn)的步驟如下: 1)數(shù)據(jù)進(jìn)行歸一化處理,然后將訓(xùn)練樣本輸入LSTM.本實(shí)驗(yàn)中將模型可記憶的長(zhǎng)度設(shè)置為10,也就是每10條軌跡預(yù)測(cè)一次軌跡. 2)LSTM訓(xùn)練完成之后,使用LSTM進(jìn)行軌跡預(yù)測(cè),然后將預(yù)測(cè)軌跡進(jìn)行變異產(chǎn)生異常軌跡,把預(yù)測(cè)軌跡和真實(shí)行駛軌跡合并成訓(xùn)練樣本的負(fù)類(lèi),把預(yù)測(cè)軌跡和異常軌跡合并成訓(xùn)練樣本的正類(lèi),并放置于異常檢測(cè)模型的訓(xùn)練樣本中. 3)建立神經(jīng)網(wǎng)絡(luò)作為異常判別模型.該網(wǎng)絡(luò)的輸入節(jié)點(diǎn)個(gè)數(shù)為12,輸出節(jié)點(diǎn)的個(gè)數(shù)是1,訓(xùn)練該網(wǎng)絡(luò)直到結(jié)果達(dá)到預(yù)期精度. 4)模型訓(xùn)練完成之后,將測(cè)試樣本輸入到LSTM模型,得到預(yù)測(cè)軌跡,再把真實(shí)軌跡和預(yù)測(cè)軌跡合并成一個(gè)測(cè)試樣本輸入到異常判別模型,得到測(cè)試結(jié)果,測(cè)試結(jié)果的值是0或1,1表示真實(shí)軌跡是異常軌跡,0則是正常軌跡. 圖4表示隨著變異因子的變化,異常軌跡識(shí)別的精確度和召回率的變化. 由圖4可知,隨著變異因子的變大,判別模型的召回率(R)和精確率(P)都在逐漸增大.精確率在變異因子λ=0.5時(shí),便達(dá)到了0.820,之后緩慢增加,在λ=1.0時(shí),精確率最大P=0.927.召回率整體略低于精確率,但是在λ=0.4之后,增長(zhǎng)的速度高于精確率,召回率同樣也是在λ=1.0時(shí)達(dá)到最大值0.890.假陽(yáng)率(FPR)隨著λ的變大而變小,主要是λ變大之后,F(xiàn)P值變小.FPR在λ=0.6之后,減小的速度變緩,最后FPR值可達(dá)到最小0.040.整體來(lái)看,模型在λ=0.8時(shí)便可以取得較好的性能,之后速度變緩.從實(shí)驗(yàn)結(jié)果可以看出,變異因子越大,模型的精確度越大,并逐漸穩(wěn)定.主要是由于變異因子過(guò)小,和正常軌跡差距較小,不利于檢測(cè)出異常軌跡;而變異因子變大,被構(gòu)建的異常軌跡的范圍變大,因此,更能有效地檢測(cè)出異常軌跡. 本文分析LSTM判別算法的性能,還將該算法與改進(jìn)的密度聚類(lèi)算法(DBSCAN)[4]以及馬爾科夫決策的異常檢測(cè)算法(MDP)進(jìn)行性能比較,圖5和圖6分別表示3種算法在數(shù)據(jù)異常(DA)和業(yè)務(wù)異常(BA)上的表現(xiàn). 從實(shí)驗(yàn)結(jié)果可以看出,對(duì)于數(shù)據(jù)異常(DA),3種算法性能評(píng)價(jià)值結(jié)果相近,改進(jìn)的DBSCAN稍好一些,精確度達(dá)到92.2%,然后是馬爾科夫過(guò)程的異常檢測(cè)算法,而LSTM算法稍微落后一下,但是整體差異并不明顯.但是對(duì)于業(yè)務(wù)異常(BA),DBSCAN算法接近于崩潰,精確度只有68.7%,各種性能都無(wú)法達(dá)到要求;MDP算法比DBSCAN稍好一些,精確度達(dá)到78.2%;表現(xiàn)最優(yōu)異的是LSTM模型,該模型的精確度并沒(méi)有受到影響,仍然達(dá)到了90.6%.由此表明,在3種算法中,本文提出的LSTM異常判別模型對(duì)于業(yè)務(wù)異常具有較優(yōu)的性能,主要是由于該模型并不是直接使用距離來(lái)判別異常軌跡,而是通過(guò)邏輯回歸模型來(lái)判別異常. 除上述實(shí)驗(yàn)之外,本文在數(shù)據(jù)中加入3%的新型異常,即在已有數(shù)據(jù)中沒(méi)有出現(xiàn)過(guò),但是在未來(lái)有可能出現(xiàn)的異常,由此對(duì)比3種算法的可擴(kuò)展性.實(shí)驗(yàn)結(jié)果如圖7所示. 從圖7可以看出,對(duì)于新型異常,LSTM仍具有較好的表現(xiàn)能力,性能上都要優(yōu)于另外2種算法.其次是密度聚類(lèi)算法,精度仍然可以達(dá)到80.3%.基于馬爾科夫過(guò)程的異常檢測(cè)算法表現(xiàn)最弱,精度只有69.5%. 文中提出的LSTM異常判別模型能有效識(shí)別業(yè)務(wù)異常的原因在于應(yīng)用隨機(jī)變異的方式,使模型可以識(shí)別出非線(xiàn)性異常,同時(shí)也跳出只能識(shí)別歷史數(shù)據(jù)異常的范圍,可以有效判別新型異常.聚類(lèi)算法一般使用距離或其他測(cè)度去判別異常,適合查找數(shù)值異常,在查找業(yè)務(wù)異常時(shí)性能較低.馬爾科夫過(guò)程在識(shí)別業(yè)務(wù)異常時(shí)比聚類(lèi)算法稍好一些,但是馬爾科夫過(guò)程也需要在歷史數(shù)據(jù)基礎(chǔ)上找到轉(zhuǎn)移概率,使得馬爾科夫過(guò)程識(shí)別新型異常時(shí)表現(xiàn)較弱.從整體上看,本文提出的LSTM異常判別模型在識(shí)別業(yè)務(wù)異常和新型異常時(shí)具有較好的優(yōu)勢(shì).另外,該模型可應(yīng)用于無(wú)監(jiān)督數(shù)據(jù),比傳統(tǒng)的BP神經(jīng)網(wǎng)絡(luò)異常識(shí)別方法應(yīng)用范圍更廣. 4結(jié)語(yǔ) 交通軌跡是具有時(shí)間序列特征的數(shù)據(jù),而長(zhǎng)短記憶模型能有效地捕捉數(shù)據(jù)的時(shí)序特征,提高預(yù)測(cè)的精確度.本文結(jié)合優(yōu)化的長(zhǎng)短記憶模型和進(jìn)化算法,通過(guò)長(zhǎng)短記憶模型預(yù)測(cè)移動(dòng)對(duì)象的軌跡,然后將軌跡變異為異常軌跡,最后訓(xùn)練異常判別模型,解決異常模型訓(xùn)練時(shí)無(wú)標(biāo)簽問(wèn)題,同時(shí)提高模型對(duì)識(shí)別業(yè)務(wù)異常的有效性.通過(guò)實(shí)驗(yàn)證明,本文提出的LSTM異常判別模型在識(shí)別業(yè)務(wù)異常時(shí)具有較高的精準(zhǔn)率和召回率,而且可以有效識(shí)別新型異常,表明該模型具有較好的擴(kuò)展性和適應(yīng)性.該模型不足之處在于沒(méi)有考慮軌跡數(shù)據(jù)的空間變換問(wèn)題,有待于進(jìn)一步深入研究. 參考文獻(xiàn) [1] 劉良旭,樂(lè)嘉錦,喬少杰,等.基于軌跡點(diǎn)局部異常度的異常點(diǎn)檢測(cè)算法[J].計(jì)算機(jī)學(xué)報(bào),2011,34(10):1966-1975. [2] 毛嘉莉,金澈清,章志剛,等. 軌跡大數(shù)據(jù)異常檢測(cè):研究進(jìn)展及系統(tǒng)框架[J].軟件學(xué)報(bào),2017,28(1):17-34. [3] BIRANT D,KUT A. ST-DBSCAN:an algorithm for clustering spatial-temporal data[J].Data & Knowledge Engineering,2007,60(1):208-221. [4] 何明,仇功達(dá),周波,等.基于改進(jìn)密度聚類(lèi)與模式信息挖掘的異常軌跡識(shí)別方法[J].通信學(xué)報(bào),2017,38(12):21-33. [5] PANG X L,CHAWLA S,LIU W,et al. On mining anomalous patterns in road traffic streams[C]//International Conference on Advanced Data Mining and Applications,2011.DOI:10.1007/978-3-642-25856-5_18. [6] ZHANG D Q,LI N,ZHOU Z H,et al. IBAT:detecting anomalous taxi trajectories from GPS traces[C]//13th International Conference on Ubiquitous Computing, Beijing,China,September 17-21,2011.DOI:10.1145/2030112.2030127. [7] 毛江云,吳昊,孫未未.路網(wǎng)空間下基于馬爾科夫決策過(guò)程的異常車(chē)輛軌跡檢測(cè)算法[J].計(jì)算機(jī)學(xué)報(bào),2018,41(8):1928-1942. [8] 俞慶英,李倩,陳傳明,等.基于BP神經(jīng)網(wǎng)絡(luò)的異常軌跡檢測(cè)方法[J].計(jì)算機(jī)工程,2019,45(7):229-236. [9] LI X L,HAN J W,KIM S. Motion-alert: automatic anomaly detection in massive moving objects[C]//Proceedings? of the International Conference on Intelligence and Security Informatics,San Diego,CA,USA,May 23-24, 2006.DOI:10.1007/11760146_15. [10]?? 安計(jì)勇,朱猛,翟靖軒,等.軌跡多因素異常集成檢測(cè)[J].計(jì)算機(jī)工程與設(shè)計(jì),2015,36(10):2700-2705. [11]?? 汪霜霜,李春貴. 一種lp正則化改進(jìn)的車(chē)輛軌跡學(xué)習(xí)算法[J].廣西科技大學(xué)學(xué)報(bào),2019,30(2):53-60. [12]?? HOCHREITER S.The vanishing gradient problem during learning recurrent neural nets and problem solutions[J].International Journal of Uncertainty, Fuzziness and Knowledge-based Systems,1998,6(2):107-116. [13]?? SCHUSTER M,PALIWAL K K.Bidrectional recurrent neural networks[C].IEEE Transaction on Signal Processing,1997,45(11):2673-2681.DOI:10.1109/78.650093. [14]?? 張洪剛,李煥.基于雙向長(zhǎng)短時(shí)記憶模型的中文分詞方法[J].華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2017,45(3):61-67. An anomaly detection algorithm for traffic trajectory data based on long short term memory model QIN Shengjun, LI Ting (School of Economics and Management, Guangxi University of Technology, Liuzhou 545006, China) Abstact: An abnormal trajectory detection method based on Long Short Term Memory model is ?proposed to solve the problem that the existing anomaly detection algorithm can't capture the timing characteristics of trajectory data, and can't effectively identify business anomalies and novel anomalies. In this paper, Long Short Term Memory model is used to predict trajectory which can improve the prediction accuracy, then the predicted trajectory is transformed into an abnormal trajectory based on the theory of evolution. Finally, an anomaly discrimination model based on Long Short Term Memory model has been constructed. The proposed model can effectively identify business anomalies and new types of anomalies, and improves the accuracy and scalability of anomaly detection. At the same time, the model is suitable for unlabeled data and solves the problem that traditional neural networks must be applied to supervised learning. In the end, comparative experiments with the improved densityclustering algorithm and Markov process verify the superiority of the model in detecting abnormal traffic trajectory. Key words: long short term memory; abnormal trajectory; traffic big data; deep learning (責(zé)任編輯:黎 ?婭) 收稿日期:2020-10-21 基金項(xiàng)目:廣西高校中青年教師科研基礎(chǔ)能力提升項(xiàng)目(2019KY0373)資助. 作者簡(jiǎn)介:秦勝君,博士,副教授,研究方向:交通大數(shù)據(jù)、數(shù)據(jù)挖掘、復(fù)雜網(wǎng)絡(luò),E-mail:shengjun_2012@foxmail.com.
猜你喜歡
中國(guó)教育技術(shù)裝備(2016年19期)2016-12-27 19:23:52中國(guó)遠(yuǎn)程教育(2016年11期)2016-12-27 18:07:31現(xiàn)代商貿(mào)工業(yè)(2016年25期)2016-12-26 09:58:02江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:45:08江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:36:29現(xiàn)代情報(bào)(2016年10期)2016-12-15 11:50:53考試周刊(2016年94期)2016-12-12 12:15:04新教育時(shí)代·教師版(2016年23期)2016-12-06 06:02:38法制與社會(huì)(2016年32期)2016-12-01 15:25:53軟件導(dǎo)刊(2016年9期)2016-11-07 22:20:49
