基于多體動(dòng)力學(xué)的六足機(jī)器人快速步態(tài)研究
2021-06-08 22:00:02劉罡汪俊鋒
廣西科技大學(xué)學(xué)報(bào) 2021年2期
劉罡 汪俊鋒
摘 要: 實(shí)現(xiàn)六足機(jī)器人步態(tài)控制的前提是能夠準(zhǔn)確進(jìn)行步態(tài)建模.本文提出一種基于多體動(dòng)力學(xué)的六足機(jī)器人三角步態(tài)仿真模型,該模型由Simulink 中的SimMechanics 模塊所建立,主要包括力模型和控制器模型.力模型針對(duì)足和接觸地面的作用力與反作用力,控制器模型用來模擬六足機(jī)器人在行走時(shí)具有仿昆蟲的行走特征.本文選用昆蟲常見的三角步態(tài)來進(jìn)行仿真研究,該模型成功執(zhí)行了六足機(jī)器人的步態(tài),驗(yàn)證了模型的有效性.
關(guān)鍵詞:多體動(dòng)力學(xué);動(dòng)力學(xué)仿真模塊;六足機(jī)器人;快速步態(tài)
中圖分類號(hào):TP242DOI:10.16375/j.cnki.cn45-1395/t.2021.02.009
0引言
機(jī)器人被設(shè)計(jì)出來完成各種復(fù)雜動(dòng)作,例如行走、攀爬、跨越障礙物等[1-3].傳統(tǒng)的輪式機(jī)器人需要在鋪好的表面(或至少是規(guī)則的)才能移動(dòng). 然而,超過50%的陸地?zé)o法進(jìn)入輪式機(jī)器人,即使是全地形機(jī)器人,也只能超越小障礙,但代價(jià)是能耗高[4-6].
足式運(yùn)動(dòng)系統(tǒng)在自然地形中具有優(yōu)越的移動(dòng)性,因?yàn)樽闶綑C(jī)器人對(duì)每只腳使用離散的立足點(diǎn),而不是需要連續(xù)支撐表面. 因此,足式機(jī)器人可以在不規(guī)則的地形中移動(dòng),通過改變其腿的結(jié)構(gòu),以適應(yīng)不規(guī)則表面.此外,腳可以根據(jù)地形條件在選定的點(diǎn)與地面建立接觸.針對(duì)六足機(jī)器人的步態(tài)研究多集中在步態(tài)規(guī)劃和運(yùn)動(dòng)分析方面,通過在ADAMS環(huán)境中建立多體動(dòng)力學(xué)建模進(jìn)行研究,但是完全通過Matlab環(huán)境的SimMechanics模塊來研究步態(tài)的很少[7-9].
本文設(shè)計(jì)了受六足昆蟲啟發(fā)的機(jī)器人機(jī)械結(jié)構(gòu),通過構(gòu)建動(dòng)力學(xué)模型并設(shè)計(jì)三角步態(tài)相關(guān)參數(shù),在動(dòng)力學(xué)仿真模型下成功實(shí)現(xiàn)所研究機(jī)器人的運(yùn)動(dòng).
1六足機(jī)器人金屬結(jié)構(gòu)
如圖1所示,采用一種鋁合金材質(zhì)結(jié)構(gòu)六足機(jī)器人作為建模對(duì)象.此機(jī)器人上下鋁合金大板由前后兩塊小鋁合金板所支撐,兩側(cè)各由兩塊小鋁合金板加以固定,整個(gè)主體中間以一塊小鋁合金板加強(qiáng)支撐,兩側(cè)空間安裝有機(jī)器人的6只足和12個(gè)舵機(jī).機(jī)器人整體長度50 cm,最大寬度38 cm,總質(zhì)量1.98 kg.每個(gè)足水平旋轉(zhuǎn)一個(gè)自由度,垂直旋轉(zhuǎn)一個(gè)自由度.
2動(dòng)力學(xué)模型
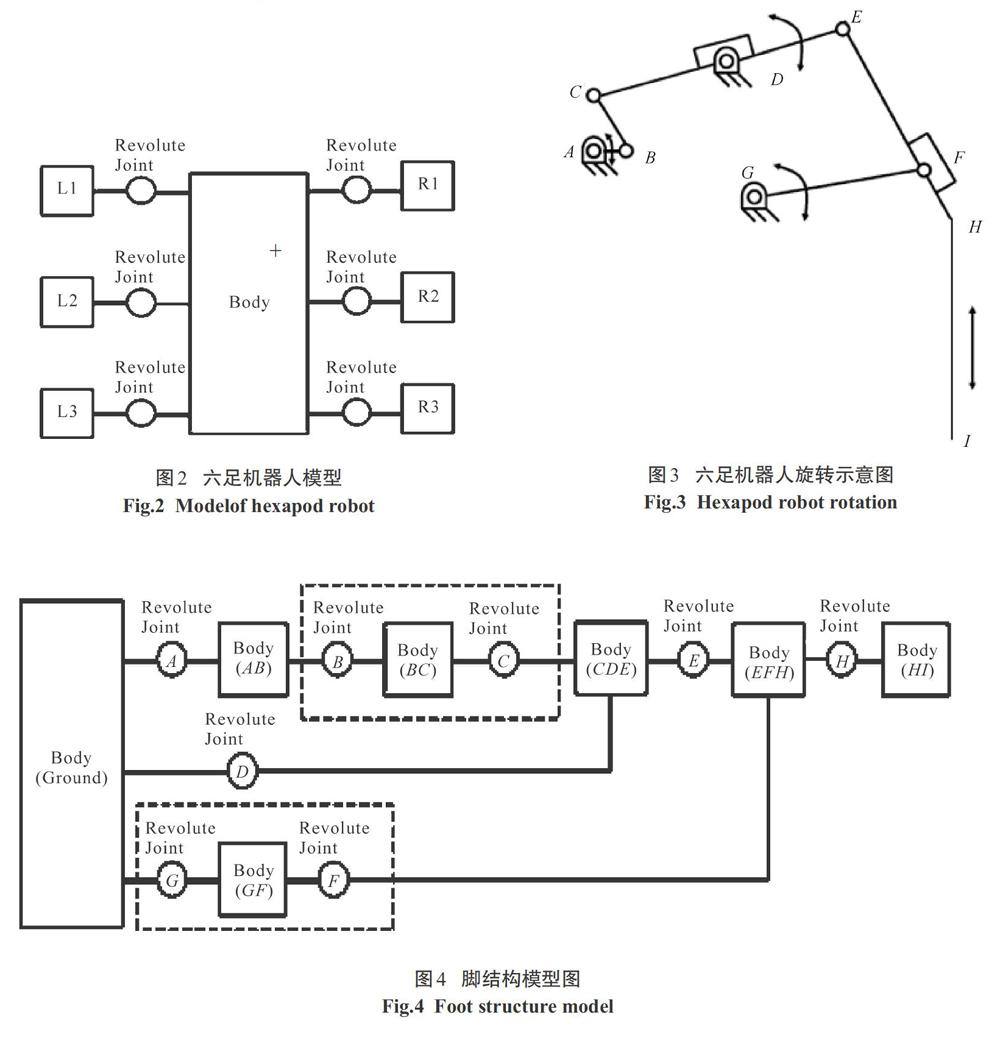
六足機(jī)器人模型如圖2所示,軀干部分為中間的Body,6個(gè)可旋轉(zhuǎn)的關(guān)節(jié)Revolute Joint連接在軀干的兩側(cè),6個(gè)足分別和6個(gè)Revolute Joint連接,其中L1、L2、L3分別代表機(jī)器人左側(cè)的前、中、后腳,R1、R2、R3分別代表機(jī)器人右側(cè)的前、中、后腳.把機(jī)器人坐標(biāo)系的原點(diǎn)定在機(jī)器人軀干的質(zhì)心位置,機(jī)器人軀干的坐標(biāo)以相對(duì)此點(diǎn)的位置來建模;然后再定義6個(gè)Revolute Joint的坐標(biāo),根據(jù)6個(gè)連接關(guān)節(jié)坐標(biāo)再建立6個(gè)足的模型.
利用6個(gè)Revolute Joint坐標(biāo)作為參考點(diǎn),依據(jù)此點(diǎn)的相對(duì)坐標(biāo)設(shè)計(jì)六足機(jī)器人旋轉(zhuǎn)示意圖(見圖3)、腳的結(jié)構(gòu)模型圖(見圖4).AB、BC、CD 和DE、EF、FG 桿件為2個(gè)四連桿機(jī)構(gòu),HI 桿件作為腳和地面接觸的部分,透過伺服電機(jī)驅(qū)動(dòng)AB 桿件,在連桿作用下,進(jìn)而使HI 桿件做向上向下運(yùn)動(dòng),來達(dá)到六足機(jī)器人每支腳做抬起、放下的動(dòng)作.通過參考點(diǎn)相對(duì)位置建立接地部分Body,然后在Body上定義所連接的關(guān)節(jié)坐標(biāo),通過關(guān)節(jié)的相對(duì)坐標(biāo)來完成腳結(jié)構(gòu)模型[10-13].
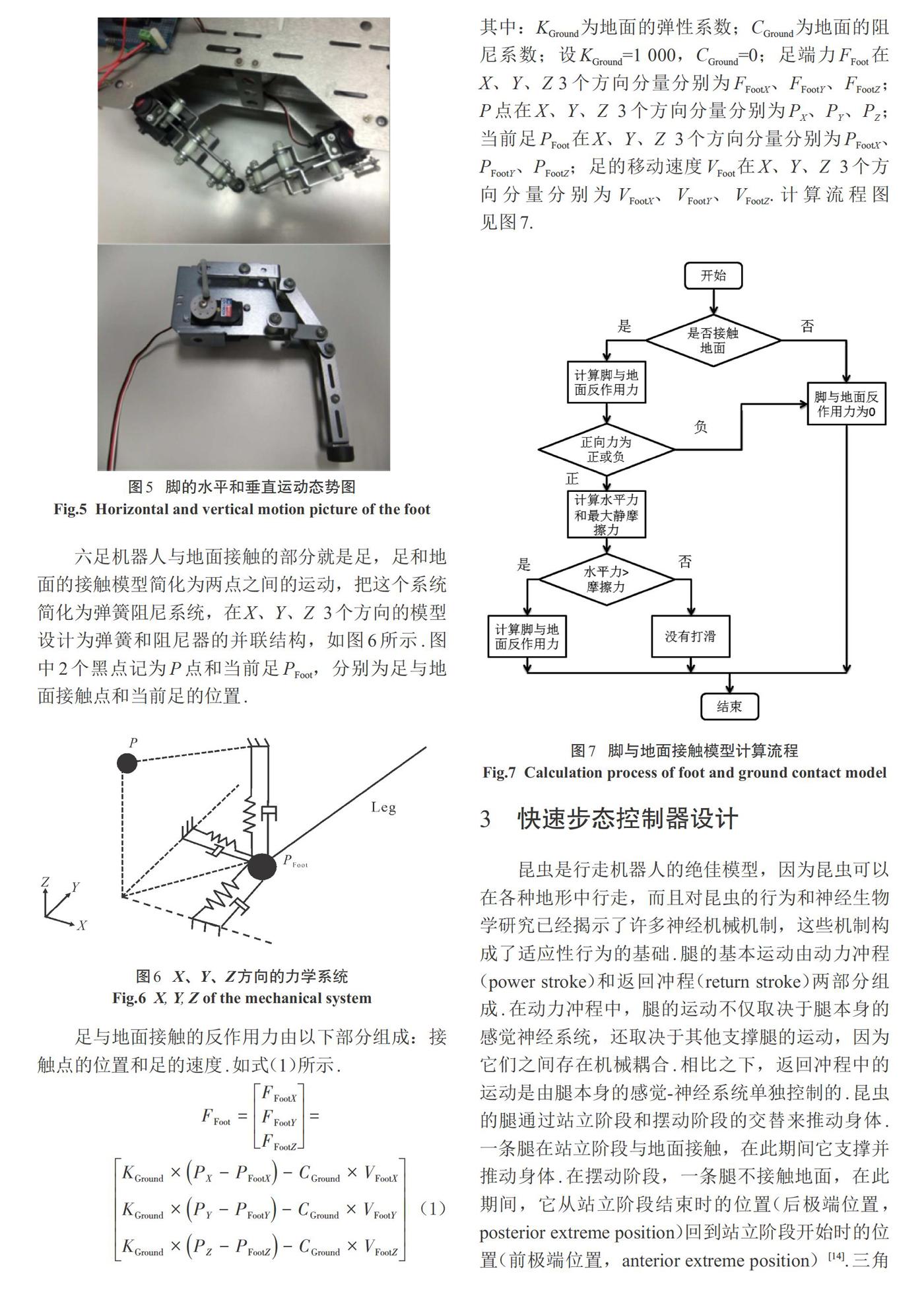
每一只腳水平旋轉(zhuǎn)一個(gè)自由度,每只腳可以水平向前向后任意旋轉(zhuǎn),但是需要注意腳與腳之間的干涉問題,若是腳與腳都旋轉(zhuǎn)180°,則一定會(huì)發(fā)生碰撞.以不互相干涉為原則,每只腳最大擺幅的角度約為90°.在舵機(jī)旋轉(zhuǎn)至中間位置時(shí),六足機(jī)器人的下鋁合金板到地面約7.25 cm;當(dāng)每只腳做抬起的動(dòng)作時(shí),舵機(jī)垂直向下旋轉(zhuǎn)90°,使六足機(jī)器人主體相對(duì)壓低,六足機(jī)器人的下鋁合金板到地面約6.5 cm;而每只腳做放下的動(dòng)作時(shí),舵機(jī)垂直向上旋轉(zhuǎn)90°,使六足機(jī)器人主體相對(duì)抬高,六足機(jī)器人的下鋁合金板到地面約8 cm.結(jié)合上述腿的水平和垂直運(yùn)動(dòng),機(jī)器人能夠向前移動(dòng),運(yùn)動(dòng)態(tài)勢(shì)圖見圖5.
六足機(jī)器人與地面接觸的部分就是足,足和地面的接觸模型簡化為兩點(diǎn)之間的運(yùn)動(dòng),把這個(gè)系統(tǒng)簡化為彈簧阻尼系統(tǒng),在X、Y、Z? 3個(gè)方向的模型設(shè)計(jì)為彈簧和阻尼器的并聯(lián)結(jié)構(gòu),如圖6所示.圖中2個(gè)黑點(diǎn)記為P點(diǎn)和當(dāng)前足PFoot,分別為足與地面接觸點(diǎn)和當(dāng)前足的位置.
足與地面接觸的反作用力由以下部分組成:接觸點(diǎn)的位置和足的速度.如式(1)所示.
[FFoot=FFootXFFootYFFootZ=]
[KGround×PX-PFootX-CGround×VFootXKGround×PY-PFootY-CGround×VFootYKGround×PZ-PFootZ-CGround×VFootZ]?? (1)
其中:KGround為地面的彈性系數(shù);CGround為地面的阻尼系數(shù);設(shè)KGround=1 000,CGround=0;足端力FFoot在X、Y、Z 3個(gè)方向分量分別為FFootX、FFootY、FFootZ;P點(diǎn)在X、Y、Z? 3個(gè)方向分量分別為PX、PY、PZ;當(dāng)前足PFoot在X、Y、Z? 3個(gè)方向分量分別為PFootX、PFootY、PFootZ;足的移動(dòng)速度VFoot在X、Y、Z? 3個(gè)方向分量分別為VFootX、VFootY、VFootZ.計(jì)算流程圖 ?見圖7.
3快速步態(tài)控制器設(shè)計(jì)
昆蟲是行走機(jī)器人的絕佳模型,因?yàn)槔ハx可以在各種地形中行走,而且對(duì)昆蟲的行為和神經(jīng)生物學(xué)研究已經(jīng)揭示了許多神經(jīng)機(jī)械機(jī)制,這些機(jī)制構(gòu)成了適應(yīng)性行為的基礎(chǔ).腿的基本運(yùn)動(dòng)由動(dòng)力沖程(power stroke)和返回沖程(return stroke)兩部分組成.在動(dòng)力沖程中,腿的運(yùn)動(dòng)不僅取決于腿本身的感覺神經(jīng)系統(tǒng),還取決于其他支撐腿的運(yùn)動(dòng),因?yàn)樗鼈冎g存在機(jī)械耦合.相比之下,返回沖程中的運(yùn)動(dòng)是由腿本身的感覺-神經(jīng)系統(tǒng)單獨(dú)控制的.昆蟲的腿通過站立階段和擺動(dòng)階段的交替來推動(dòng)身體.一條腿在站立階段與地面接觸,在此期間它支撐并推動(dòng)身體.在擺動(dòng)階段,一條腿不接觸地面,在此期間,它從站立階段結(jié)束時(shí)的位置(后極端位置,posterior extreme position)回到站立階段開始時(shí)的位置(前極端位置,anterior extreme position)[14].三角步態(tài)屬于行走速度較快的步伐,在其行走過程中,一次抬起3只腳并往前擺動(dòng),分別為同側(cè)的前、后腳以及對(duì)側(cè)的中間腳,而其他3只腳則負(fù)責(zé)支撐整個(gè)身體,這6只腳可形成2個(gè)三角形,連續(xù)替換可形成一個(gè)完整的步伐周期,其power stroke 的動(dòng)作時(shí)間等于return stroke 動(dòng)作時(shí)間.圖8為機(jī)器人在12 s所走的三角步態(tài),圖中波峰代表腳在做return stroke的動(dòng)作,波谷代表腳在做power stroke 的動(dòng)作.所以從圖8可看出開始由L1、L3、R2 做power stroke 的動(dòng)作,R1、R3、L2 做return stroke 的動(dòng)作.通過SimMechanics模塊建立六足機(jī)器人三維建模圖(見圖9).
4仿真結(jié)果分析
圖10表示機(jī)器人身體在X、Y方向的位置,可知身體在X方向一直前進(jìn),在Y方向往左偏,并有曲折現(xiàn)象.由于機(jī)器人做三角步態(tài)移動(dòng)時(shí),同一時(shí)間只有同側(cè)的前后以及對(duì)側(cè)中間腳支撐,所以造成左右搖擺.由圖10(c)看出Z方向曲線開始有往下掉的部分,是因?yàn)閱?dòng)時(shí)受重力作用下沉,之后每隔2 s有類似脈動(dòng)曲線產(chǎn)生,這是由于6只腳做重復(fù)運(yùn)動(dòng).
6只腳X方向的反作用力如圖11—圖14所示.圖11是六足機(jī)器人的左前方腳L1和右前方腳R1的反作用力,可以看出正的反作用力較多,表示推動(dòng)機(jī)器人前進(jìn)的力.圖12為機(jī)器人左邊中間腳L2及右邊中間腳R2的反作用力,可以看出負(fù)的反作用力較多,表示有使機(jī)器人減速的力.圖13為機(jī)器人左后方腳L3及右后方腳R3的反作用力,可以看出正的反作用力較多,表示推動(dòng)機(jī)器人前進(jìn)的力.當(dāng)L1、L3、R2 開始做power stroke 的時(shí)候,腳碰地開始往后擺來帶動(dòng)身體往前.這3只腳X、Y 方向的反作用力對(duì)身體所造成的總力矩一開始呈現(xiàn)往左轉(zhuǎn)的情況,到達(dá)2 s后運(yùn)動(dòng)狀態(tài)改變,改由R1、R3、L2 開始做power stroke 而使身體往右轉(zhuǎn),而這3只腳的反作用力對(duì)身體所造成的總力矩,約每2 s輪替,見圖14.
6只腳Y方向的反作用力如圖15—圖17所示.由圖15看出左前方腳L1負(fù)的反作用力較多,也就是往右偏的力量大,而右前方腳R1正的反作用力較多,也就是左偏的力量較大.由圖16看出左邊中間腳L2負(fù)的反作用力較多,也就是往右偏的力量大,而右邊中間腳R2正的反作用力較多,也就是左偏的力量較大.由圖17看出左后方腳L3負(fù)的反作用力較多,也就是往右偏的力量大,而右后方腳R3正的反作用力較多,也就是左偏的力量較大.
5結(jié)論
本文分析了六足機(jī)器人的多體動(dòng)力學(xué)模型:在SimMechanics環(huán)境下建立模型;通過腳與地面的接觸情況,計(jì)算出摩擦力和反作用力,從而完成步態(tài)運(yùn)動(dòng);針對(duì)快速步態(tài)的代表之一三角步態(tài)進(jìn)行仿真,仿真結(jié)果表明,建立的模型能夠正確表現(xiàn)機(jī)器人的行為能力.此研究為后續(xù)六足機(jī)器人的自由步態(tài)研究打下了基礎(chǔ).
參考文獻(xiàn)
[1] 毛志賢,韋建軍,王春寶,等.新型四臂扶持式康復(fù)機(jī)器人設(shè)計(jì)[J].廣西科技大學(xué)學(xué)報(bào),2020,31(3):1-7.
[2] 王曉琳,陸紹輝,李東平,等.一種輕型碳纖維爬索機(jī)器人及其檢測系統(tǒng)研究[J].廣西科技大學(xué)學(xué)報(bào),2017,28(4):25-31.
[3] MAO L H,GAO F,TIAN Y,et al.Novel method for preventing shin-collisions in six-legged robots by utilising a robot-terrain interference model[J].Mechanism and Machine Theory,2020,151:103897.
[4] MAO L H,TIAN Y,GAO F,et al.Novel method of gait switching in six-legged robot walking on continuous-nondifferentiable terrain by utilizing stability and interference criteria[J].Science China-Technological Sciences, 2020,63(12):2527-2540.
[5] MAHAPATRA A,ROY S?S,PRATIHAR D?K.Optimal feet-forces' and torque distributions of six-legged robot maneuvering on various terrains[J].Robotica,2019,38(6):1-23.
[6] ZHAI S,JIN B,CHENG Y L.Mechanical design and gait optimization of hydraulic hexapod robot based on energy conservation[J].Applied Sciences,2020,10(11):3884.
[7] 金振林,張金柱,高峰.一種消防六足機(jī)器人及其腿部機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析[J].中國機(jī)械工程,2016,27(7):865-871.
[8] 艾青林,徐冬,張立彬.基于阻抗特性的六足機(jī)器人動(dòng)態(tài)穩(wěn)定性[J].中國機(jī)械工程, 2017, 28(24):2981-2989.
[9] CHEAH W,KHALILI H H,ARVIN F,et al.Advanced motions for hexapods[J].International Journal of Advanced Robotic Systems,2019,16(2):172988141984153. DOI:?10.1177/1729881419841537.
[10]?? SORIN M O,NITULESCU M. The modeling of the hexapod mobile robot leg and associated interpolated movements while stepping[C]//2012 16th International Conference on System Theory,Control and Computing(ICSTCC). IEEE,2012.
[11]?? NITULESCU M,IVANESCU M,NGUYEN H V D,et al. Designing the legs of a hexapod robot[C]//2016 20th International Conference on System Theory,Control and Computing(ICSTCC). IEEE,2016.
[12]?? BARAI R K,SAHA P,MANDAL A. SMART-HexBot:a simulation,modeling,analysis and research tool for hexapod robot in virtual reality and simulink[C]//Proceedings of Conference on Advances in Robotics,2013. DOI:10.1145/2506095.2506126.
[13]?? OLARU S M,NITULESCU M. Modelling of the hexapod mobile robot leg using matlab simmechanics[C]. Advances in Robot Design and Intelligent Control. Berlin:Springer International Publishing,2016.
[14]?? 李滿宏,張明路,張建華,等.六足機(jī)器人關(guān)鍵技術(shù)綜述[J].機(jī)械設(shè)計(jì),2015,32(10):5-12.
Study on fast gait of hexapod robot based on multi-body dynamics
LIU Gang, WANG Junfeng
(School of Advanced Manufacturing Engineering, Hefei University, Hefei 230601, China)
Abstract: The premise of realizing gait control of hexapod robot is that it can accurately model gait. We propose a simulation model of hexapod robot triangular gait based on multibody dynamics. The model is established by the SimMechanics module in the Simulink, which mainly includes the force model and the controller model. Force and reaction force of force model against foot and contact ground is designed, and the controller model is used to simulate the walking characteristics of thehexapod robot when walking. In this paper, the common triangular gait of insects is selected forsimulation. The model successfully performs the gait of hexapod robot and verifies the validity of the model.
Key words: multi-body dynamics; SimMechanics; hexapod robot; fast gait
收稿日期:2020-12-09
基金項(xiàng)目:安徽省科技重大專項(xiàng)(18030901009);安徽高校自然科學(xué)研究項(xiàng)目重點(diǎn)項(xiàng)目(KJ2019A0839);合肥學(xué)院科學(xué)研究發(fā)展
基金項(xiàng)目(20ZR01ZDA)資助.
作者簡介:劉罡,碩士,講師,研究方向:機(jī)器人技術(shù),E-mail:liugango@hfuu.edu.cn.
