一種基于粒子群優化算法的異構傳感器分配方法*
2021-06-11 00:52:44溫雅,賈婧,張賓,王洋,安琪
火力與指揮控制 2021年4期
溫 雅,賈 婧,張 賓,王 洋,安 琪
(1.北方自動控制技術研究所,太原 030006;2.駐太原地區第二軍代室,太原 030006)
0 引言
在陸、海、空、天、電五維一體的聯合作戰背景下,針對云、煙、霧、塵等復雜氣象環境以及復雜電磁環境,為滿足復雜戰場環境態勢感知理解的需求,需要微波、毫米波、可見光、紅外、雷達、電子支援措施、敵我識別等有源、無源傳感器的合理分配,實現智能的感知環境和目標。因此,作為聯合作戰的“千里眼”的傳感器協同感知智能分配方法研究已成為一項迫切的任務,具有重要的現實意義。
Nash[1]在1977 年提出一種利用線性規劃技術對跟蹤目標進行傳感器-目標分配方法,最先將優化技術用于傳感器管理,2010 年,Hitchings 等人基于滾動時域控制[2],提出一種隨機控制逼近算法。國內對傳感器分配方法的相關研究大都以傳感器-目標的效能因子[3]為中心,效能最大化為目標函數提出的人工智能優化算法,如遺傳算法[4-5]、蟻群算法[6]等,這些算法都是基于效能最大化實現傳感器智能分配,沒有考慮異構傳感器的感知能力及對復雜戰場環境的抗干擾能力。近年來,隨著戰場環境復雜化,目標環境機動性增強、復雜的氣象環境和電磁環境對傳感器產生較強干擾,單一傳感器獲取空間目標信息不完備問題突出[7]。
針對以上難題,本文引入異構傳感器智能感知[8]的概念,針對不同傳感器自身特征,考慮了傳感器抗干擾性能等因素,提出一種傳感器信息感知能力評估指標體系并構建了傳感器感知能力定量評價模型,計算出傳感器指數,再利用傳感器指數,考慮了有效覆蓋率、電磁環境變化、態勢變化等因素作為目標函數,研究基于粒子群算法的智能傳感器分配方法。粒子群算法[9]采用了多粒子的并行運算,是全局優化算法里比較新的算法,在求解多維數、非線性和不可微的復雜問題上有著良好的表現。將該方法用于本研究,提高了傳感器的總體感知能力及資源有效利用率,優化了傳感器網絡對監視區域的有效覆蓋率。
1 傳感器感知能力建摸
傳感器指數[10](傳感器感知信息能力指數)是衡量傳感器信息獲取能力的重要標志,與裝備器材的各項性能直接相關。傳感器在作戰過程中的性能通過傳感器信息感知能力評估指標體系綜合反映。結合復雜戰場環境下戰場態勢感知的軍事需求呈現出范圍廣、數量多、連續性、實時化和干擾因素多的特點[11],本文建立了傳感器信息感知能力評估指標體系如圖1 所示。
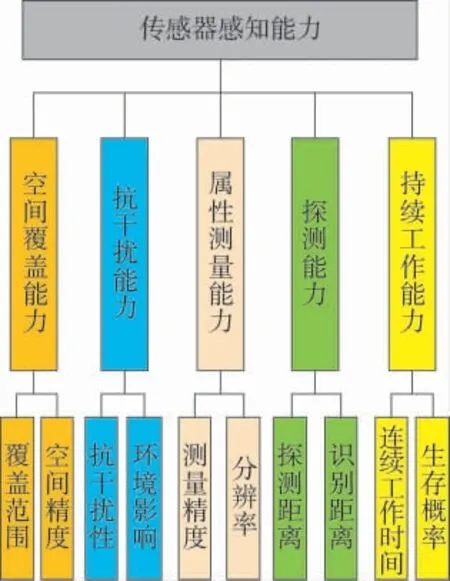
圖1 傳感器信息感知能力評估指標體系
1)確定指標權重的方法。采用問卷調查法,設計傳感器指數問卷向專家發放,根據專家的反饋結果,利用特征根法及判斷矩陣一致性檢驗方法計算出各指標的權。
2)傳感器評估指標值的確定及其規范化。本文傳感器信息感知能力評估指標體系中的戰術技術性能指標,都屬于其值越大越好的屬性,這些屬性的值通常由各個廠家在傳感器出廠時提供,只需對其收集整理。對于沒有提供的,例如,抗干擾能力,采用專家打分的方法給出屬性值。指標的量化如表1 所示。
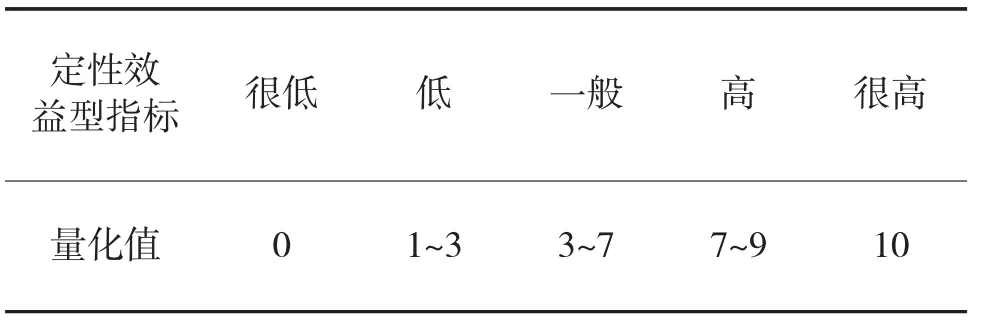
表1 定性效益型指標的量化
3)加權和法計算傳感器指數。設傳感器感知能力模型第3 層的第j 個指標的權為ωj及其屬性值為zij,因此,第i 個傳感器的指數為:

其中,n 為指標數。先從各傳感器的戰術技術性能表中查出各種所需參數,不能查出的或較難確定的采用專家打分方法確定。然后將數據進行規范化處理,結合指數各指標的權重值,采用加權和法獲得指數。
2 異構傳感器智能分配
2.1 粒子群優化算法概述
粒子群優化(PSO)算法[12]采用速度-位置搜索模型,每個粒子代表解空間中的一個解,適應度函數決定解的優劣程度。該算法隨機初始化為一群粒子,每個粒子在初始速度和位置的基礎上,基于自己歷史最好位置和群體的歷史最好位置來更新自己的速度和位置。該算法具有便于理解、概念簡明、實現方便、快速收斂及參數設置少等優點[13]。
設粒子群中的一個粒子代表一種傳感器的位置分布方案。若傳感器個數為Nc,則粒子id 在第t代的狀態表示為:
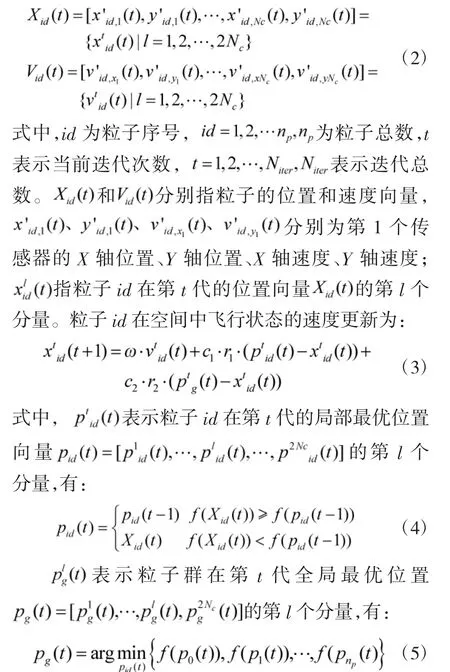
式(4)中,第1 部分為粒子運動慣性,表示粒子運動且保持向前運動狀態的趨勢。ω 為慣性權重因子。指粒子關于歷史值的保留程度。ω 較大,即式(4)第1部分的乘積值較大,粒子在搜索域的搜索步長較大,粒子下次位置與上次位置的距離較大,則粒子全局搜索能力較強,但局部搜索能力較弱;ω 較小,則粒子在搜索域的搜索步長較小,在局部區域中的搜索次數較多,局部搜索能力強,但全局搜索能力較弱。在本文中ω 取值為0.5。
式(4)中,r1和r2為加速常數,為[0,1]內均勻分布的隨機數,第2 部分代表粒子對于自己在搜索域運動的歷史最優值的借鑒程度,粒子下一次運動時會依據自己歷史最優位置;第3 部分目的是縮小其他粒子與全局最優粒子之間的位置。
粒子群算法中各粒子通過依據自己的歷史位置并與群體中其他粒子保持信息共享,來搜索全局最優解。r1和r2影響粒子對自己歷史經驗的借鑒程度和群體中其他粒子運動信息的程度。本文中r1和r2取值為2。
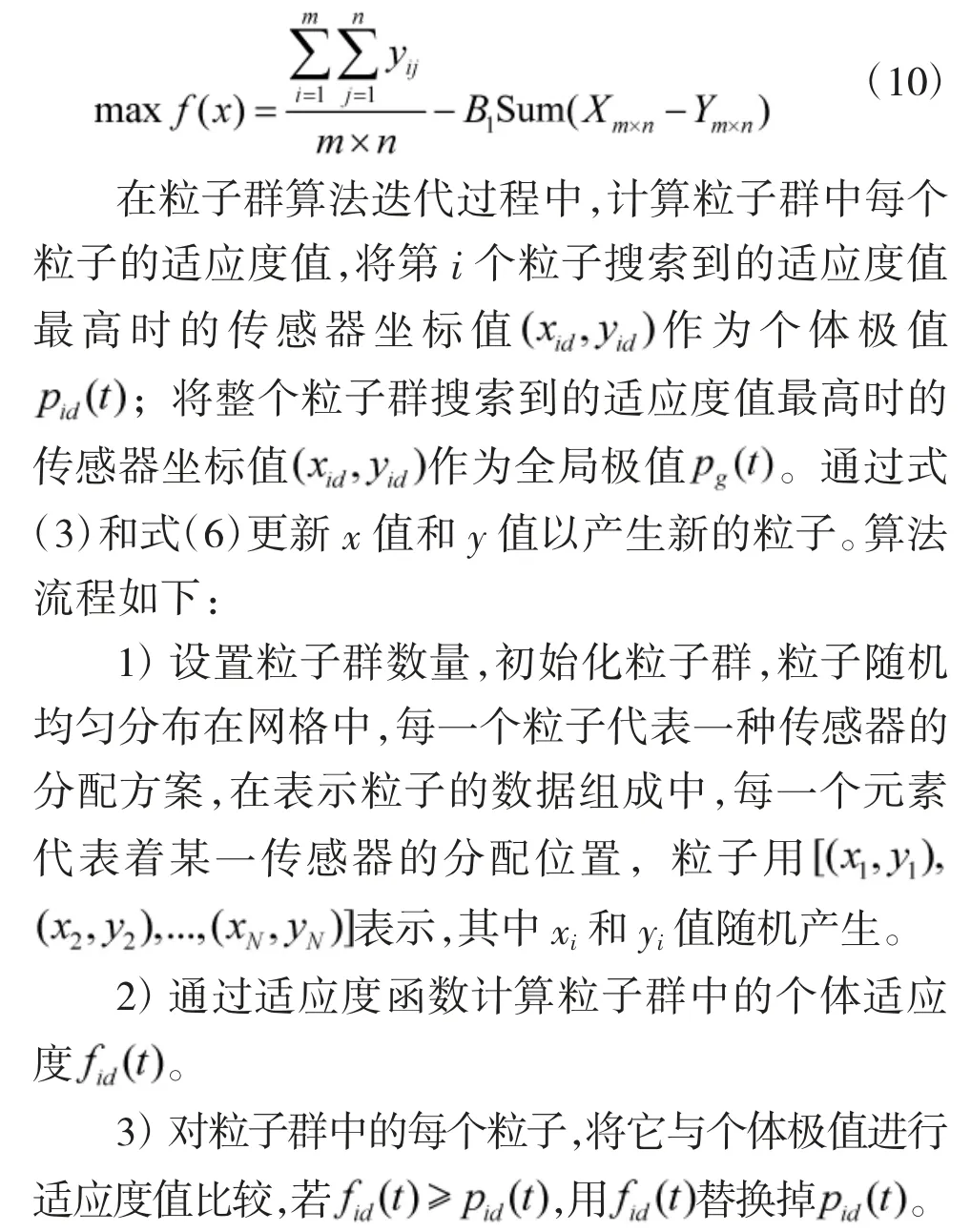
2.2 面向傳感器分配的粒子群優化算法
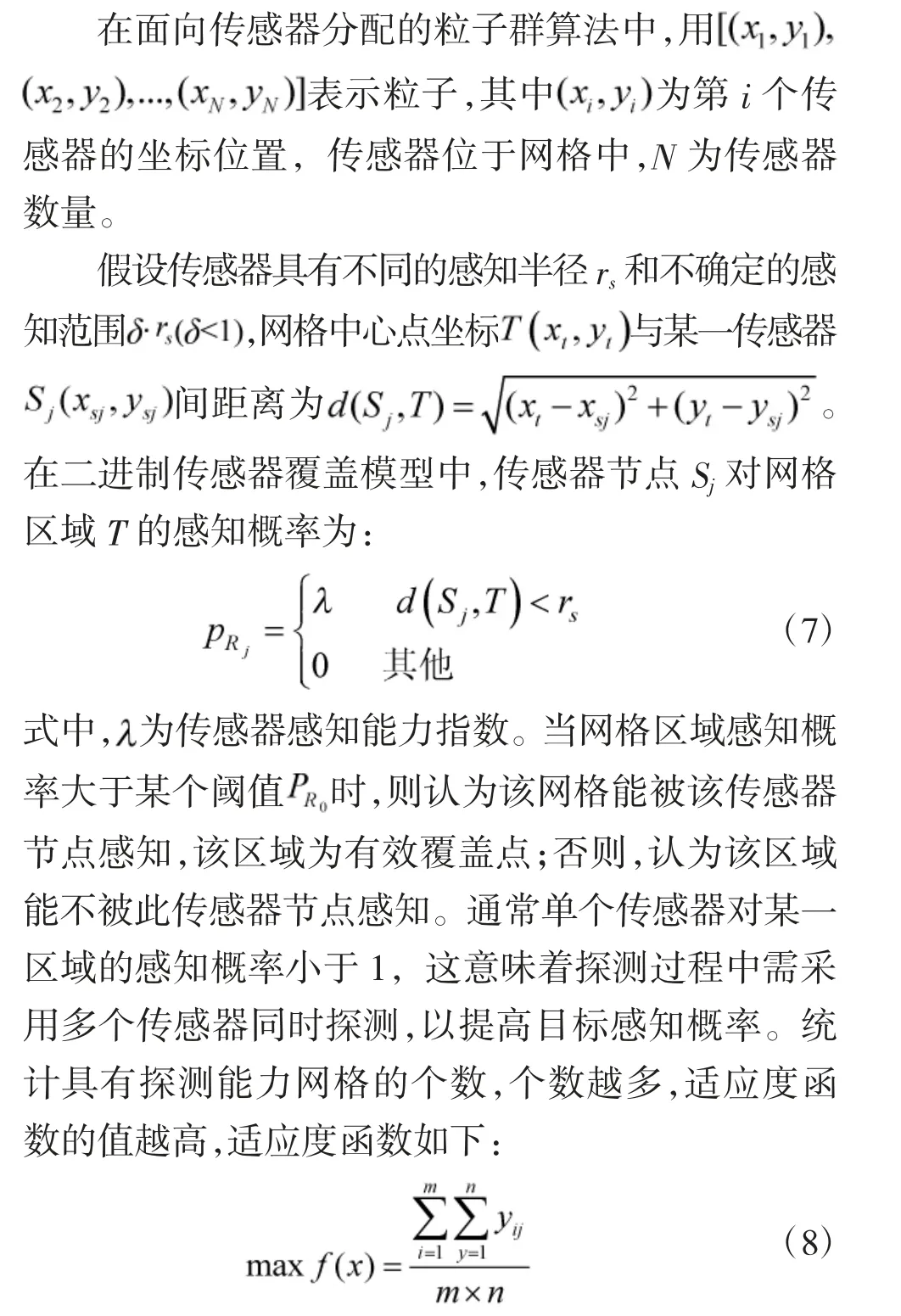
根據干擾源的位置,重新部署傳感器,定義適應度函數:

根據態勢變化(某一區域出現多個目標,重點偵察),重新部署傳感器,定義適應度:
4)根據式(11)和式(14)更新粒子,生成新的粒子群。
5)判斷最終結果是否滿足所求問題的優化目標,滿足則結束迭代,否則返回步驟2)。
3 仿真結果
從各傳感器的戰術技術性能表中查出各種所需參數,結合氣象環境對幾種常用傳感器的指數進行計算,傳感器1 為可見光傳感器,傳感器2 為紅外傳感器,傳感器3 為探測雷達。
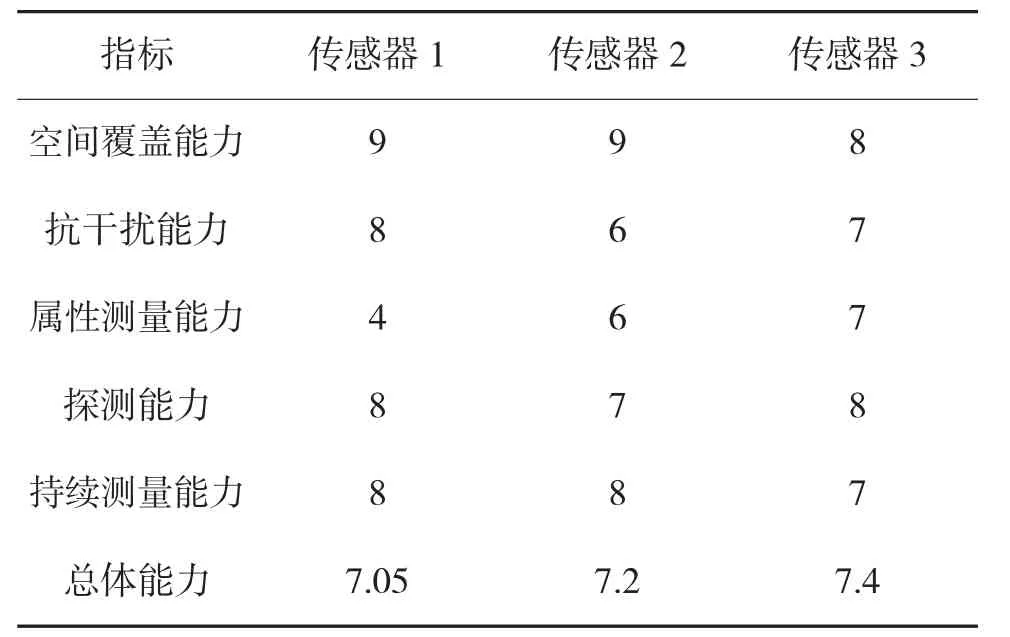
表2 晴天各傳感器指數
以上結果表明,晴天條件下,可見光、紅外、雷達傳感器指數相差不大;在惡劣氣象條件下(雨、霧、沙塵)下,可見光和雷達傳感器指數相差不大,但是大氣對紅外輻射的衰減嚴重,導致傳感器的指數降低。
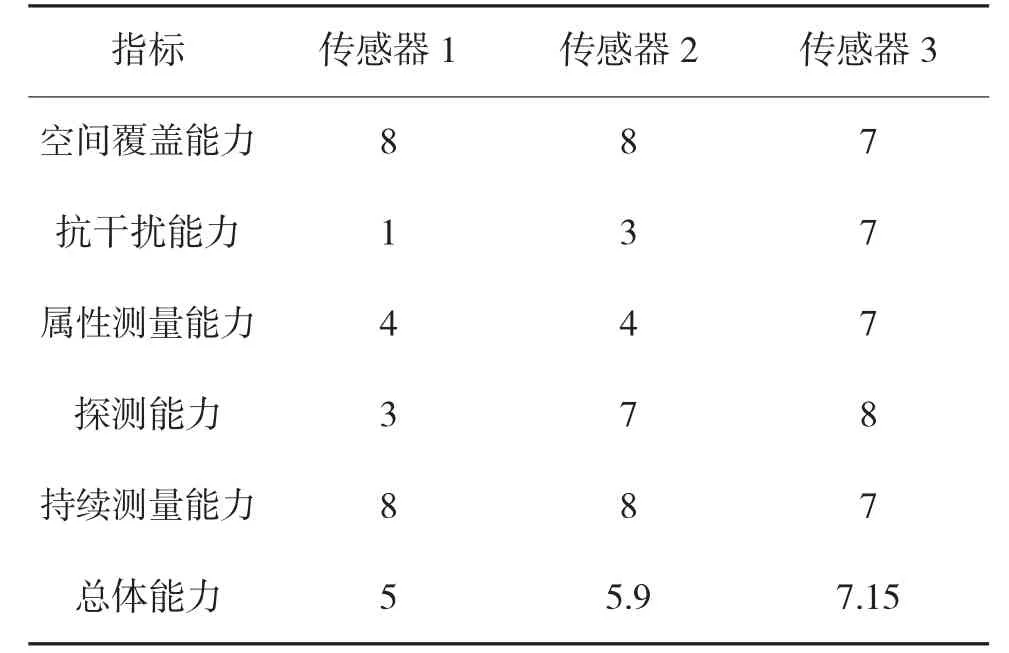
表3 雨(霧、沙塵)天各傳感器指數
利用粒子群優化算法對傳感器的位置進行可見光、紅外、雷達傳感器進行部署,首先針對電磁環境,避開干擾區域;其次,選擇傳感器感知能力高的傳感器類型進行部署。本次實驗中利用兩種傳感器對50 km*50 km 的區域進行部署,圖2 表示算法訓練過程,圖3 是部署結果,覆蓋率達到83.6%。仿真結果表明,粒子群算法初始化時,傳感器探測區域重疊程度高,有效覆蓋率較低,隨著迭代次數增加,目標區域有效覆蓋率在達到較高值(83.6 %)后,趨于平穩,但傳感器探測區域仍有盲區。

圖2 算法訓練過程
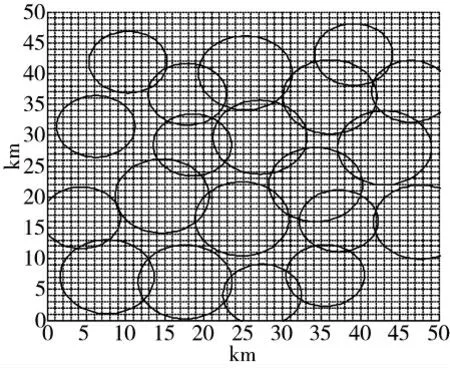
圖3 傳感器部署結果
當目標識別概率低時,要求對重點目標區域進行多重覆蓋,提高識別概率,本實驗基于兩種傳感器對黃色目標區域進行二重覆蓋,采用粒子群優化算法對傳感器進行分配,分配結果如圖4 所示。
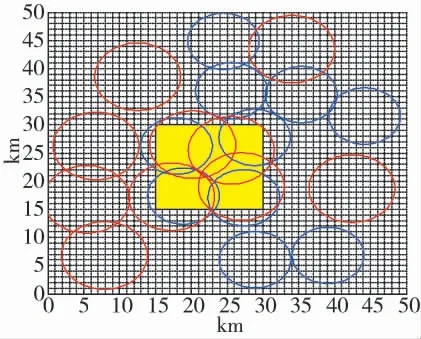
圖4 重點區域傳感器部署結果
設置電磁環境干擾源,然后根據干擾源的位置,重新部署傳感器,如圖5 所示。
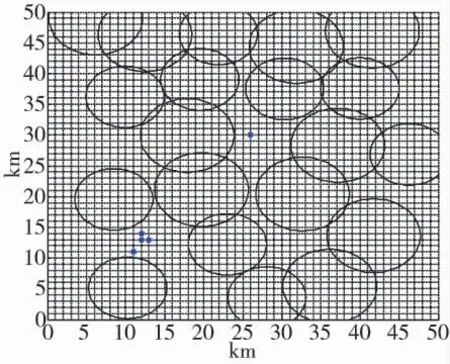
圖5 電磁干擾源環境下傳感器部署結果
依據態勢變化當某一區域出現多個目標時,將該區域設置為重點區域,重點區域需要完全覆蓋。圖6 是迭代次數500 次,重點目標區域覆蓋度達到98%,非重點目標區域達到42.6%;圖7 是迭代次數1 000 次,重點目標區域覆蓋度達到100 %,非重點目標區域達到73.2%。

圖6 依據態勢變化傳感器部署結果(a)
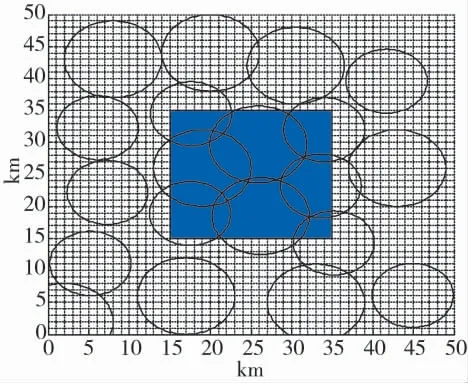
圖7 依據態勢變化傳感器部署結果(b)
仿真結果表明,粒子群算法在保證重點目標區域優先覆蓋的前提下,相當程度上擴大了目標區域的覆蓋范圍。雖然非重點區域存在盲區,但此部署方案是綜合考慮優先滿足重點區域全覆蓋,以及減少傳感器資源不必要的浪費的結果,利用有限的傳感器資源最大程度上實現了目標區域的有效覆蓋。
4 結論
在瞬息萬變的戰場環境中,戰場態勢、電磁環境等隨時都在變化,無疑增加了傳感器對環境的感知難度和復雜度,如何合理地部署傳感器尤其重要。本文提出的算法針對異構傳感器自身特征,在構建傳感器感知能力指標體系時,考慮了傳感器的抗干擾性能等因素,通過驗證,利用本文提出的基于粒子群優化算法的異構傳感器分配方法,能夠隨著環境變化對異構傳感器進行合理的分配。該算法提高了傳感器的總體感知能力及資源有效利用率。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44