基于固定翼無人機平臺的風矢量估計
2021-06-11 00:51:48何孝游
火力與指揮控制 2021年4期
何孝游
(中國電子科技集團特種飛機系統工程有限公司,成都 610100)
0 引言
無人機在世界各地的國防計劃和戰略中扮演的角色愈來愈重要。其導航、制導、控制、傳感器等相關學科的進步也使得小型無人機領域得到蓬勃發展。當前無人機不僅廣泛應用于軍事領域,如偵察、監視、作戰損壞評估和通信系統,而且在民用和商用中也有較強潛力,包括環境監測(如污染、天氣和科學應用)、森林火災監測、空中監視和測繪、交通監視等。為了開發這些應用程序且使其成為成熟產品,需要改善無人機的可靠性,進一步擴展無人機的能力,改進無人機的易用性,并進一步降低無人機的成本以及應對和整合無人飛機的監管挑戰。
無人機一般又可以分為:固定翼無人機、單旋翼直升機和多旋翼無人機,這3 種類型的無人機都有其各自的特點。
固定翼無人機的機翼位置和后掠角等參數固定不變,它們依靠發動機(電動或者油動)來產生前向的推力,依靠通過舵機產生的操縱力矩來改變無人機機體的姿態,從而產生相應的攻角,進而由氣動產生的升力來平衡無人機的重力。固定翼無人機具備結構簡單、航程遠以及所需消耗能量少的優點,但是由于它需要利用氣動產生的升力來克服重力,從而決定了它在起飛或者降落的時候需要借助跑道(或者彈射器)來獲取初始速度。
單旋翼直升機的升力則是利用改變螺旋槳的轉速以及其槳葉的傾角來實現的,所以,它的升力大小和方向是依靠操縱桿和油門來進行控制,與固定翼無人機相比,其最大的優點是可以進行垂直起降,決定了它可在任何地方進行起飛或者降落,包括艦艇、車載等機動平臺。但是它也具有相應的缺點:續航能力弱、機械結構復雜、維護成本高。
多旋翼無人機則可以被看成是一種特殊的直升機,它的動力系統是由多個螺旋槳組成,最具代表性的就是四旋翼無人機。所以它也具備垂直起降的能力。但是它與單旋翼直升機不同的是,它是依靠控制螺旋槳的轉速來實現升力。多旋翼無人機的優點是其結構簡單、可靠性高和維護成本低。當然它的缺陷也很明顯,就是續航能力弱和最大載荷能力低。
而對于固定翼無人機,一般機翼長度在5 ft~10 ft 之間,稱之為小型固定翼無人機。本文主要是基于小型固定翼無人機平臺進行的算法開發。
小型固定翼無人機面臨的主要挑戰之一是在大風條件下飛行。由于20 m/s~50 m/s 范圍內的空速是小型固定翼無人機的典型飛行形式,并且由于風速經常超過10 m/s,即風速在空速中占比最高甚至會達到50%以上。而固定翼無人機的氣動力和氣動力矩則是與攻角、動壓、側滑角等相關。而這些變量均被風的速度大小和方向所影響,所以小型無人機要想在空中獲取較好的飛行性能,則需要克服風對它的影響[1-2]。
小型無人機一般為充分利用有效載荷,通常會限制一些傳感器配置。對于體積和質量較大的風速儀,小型無人機系統一般并不安裝;并且為了降低成本,攻角/側滑角等傳感器在小型固定翼無人機上也很少使用。故而文獻[3]采用風速儀,文獻[4]利用側滑角傳感器信息,對風速進行估計的方法并不適用于小型固定翼無人機系統。文獻[5]僅利用空速管測量的動壓數據,然后通過構建擴展卡爾曼濾波對風速進行在線估計,該方法收斂速度較慢,且對無人機的機動性提出要求;文獻[6-7]則在文獻[5]的基礎上改用無跡卡爾曼濾波和粒子濾波對風速進行在線估計,該方法的缺點是計算量較大,實際工程中應用難度較大;文獻[8]則是利用牛頓-拉夫遜迭代求解空速管所含的關于風速的非線性方程,文獻[9]則是引入關于風速的大氣模型,并與動壓的測量數據相結合,通過高斯-牛頓方法求解其非線性最小二乘;文獻[8-9]也均存在計算量大的問題,對實時性要求較高;文獻[10]則是利用自適應卡爾曼濾波去估計風速,它引入了空速管噪聲作為狀態變量,并對其進行在線估計,該方法相當于對狀態變量進行擴維,增大計算量的同時也提高了內存消耗;文獻[11]則是考慮到地速的不精確對空速估計造成的影響,其引入陀螺、加速度計的在線校準,但是該方法未考慮空速管的不確定度對風速估計的影響;還有文獻[12]采用空速和雷達測量數據實現了風速的估計,但是小型無人機上并未安裝雷達,故而該方法不適用于小型固定翼無人機。
一個系統的可觀性程度決定了其對風速的估計效果。所以關于系統是否可觀的分析也是很有必要的,文獻[13]則是針對狀態估計的可觀性進行相關分析,本文對該方法進行了參考。
本文利用動壓測量信息并結合線下修正的氣動數據對風速進行在線估計,并提出了一種狀態受限下的擴展卡爾曼濾波算法。該方法與傳統方法相比,計算量并未提出更高要求,且由于利用了氣動數據,使得系統即使在低機動條件下也完全可觀,其風速的收斂速度更快;并引入卡方檢驗和狀態受限來提高濾波算法的魯棒性。
1 風速估算原理
定義地理坐標系(n 系)如下:坐標系原點為無人機質心,x 軸方向為無人機所在當地水平面內,且指向正北方向,y 軸為無人機所在當地水平面內,且指向正東方向,z 軸方向由右手原則確立。
定義無人機機體坐標系(b 系)如下:坐標系原點為無人機質心,x 軸方向為無人機縱軸方向,且指向機首為正,z 軸為其縱向對稱面內且與x 軸垂直,方向向下,y 軸方向由右手原則確立。地理坐標系至無人機機體坐標系的轉換矩陣為,由俯仰角θ、偏航角和滾轉角決定。
定義無人機風速坐標系(w 系)如下:坐標系原點為無人機質心,x 軸方向為無人機風速方向,且指向相對風速方向為正,z 軸為其縱向對稱面且與x軸垂直,方向向下,y 軸方向由右手原則確立。風速坐標系至無人機機體坐標系的轉換矩陣為,由攻角α、側滑角β 確定。


圖1 風速三角關系圖
動壓Pvm由傳感器獲得,故可獲得空速向量的模vat為:

即
故知道攻角、側滑角、動壓信息即可以估計出三維風速矢量信息。若忽略垂直平面風速,則攻角為:

式(1)中空氣密度ρ 計算公式如下:

式中,h、Tt為無人機所在的海拔高度(單位m)和溫度(單位℃),其中高度由導航解算得到,溫度由溫度傳感器測量得到。
2 濾波算法設計與實現
2.1 系統狀態方程
故狀態模型通式如下:

式中,Wk為均值為0,協方差為Qk的高斯白噪聲,
Φ 為狀態變量的轉移矩陣:
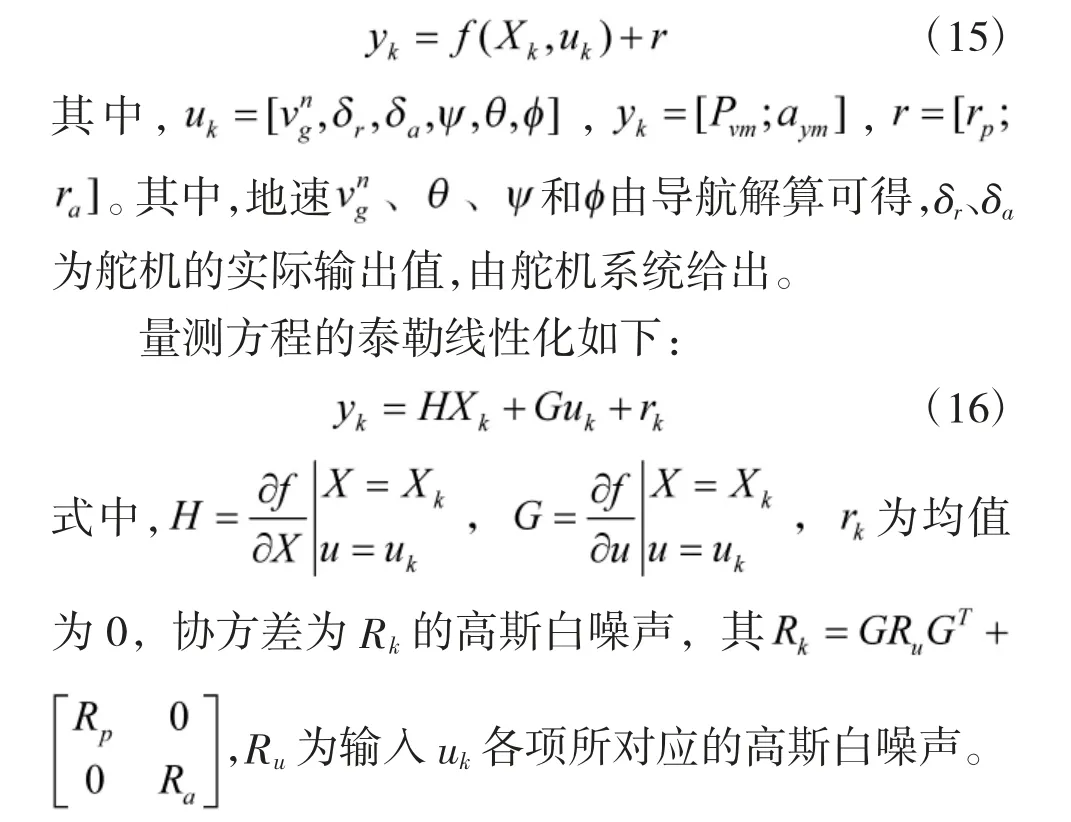
2.2 系統量測方程
無人機系統大氣模塊中風速管可以測得動壓,其測量方程描述如下:
即量測方程為:

式(13)中,Pv、β 表達式如下:
寫成通式如下:
2.3 系統可觀性分析
設計卡爾曼濾波算法之前,需要分析該系統是否可觀,若該系統完全可觀,則系統的狀態變量方可得到較好的估計,在此首先根據系數凍結法,將時變系統轉變成定常分段系統,再利用凱利-哈密爾頓定理來進行系統的可觀測性分析。根據式(10)和式(16)建立可觀測矩陣為:

矩陣Φ 為單位矩陣,則上式可以變為:

顯然可觀測矩陣的秩rank(0)=3,即觀測矩陣滿秩,故而該系統完全可觀,即上述建立的狀態方程、量測方程能夠通過擴展卡爾曼濾波實現風速及動壓修正因子的估計。
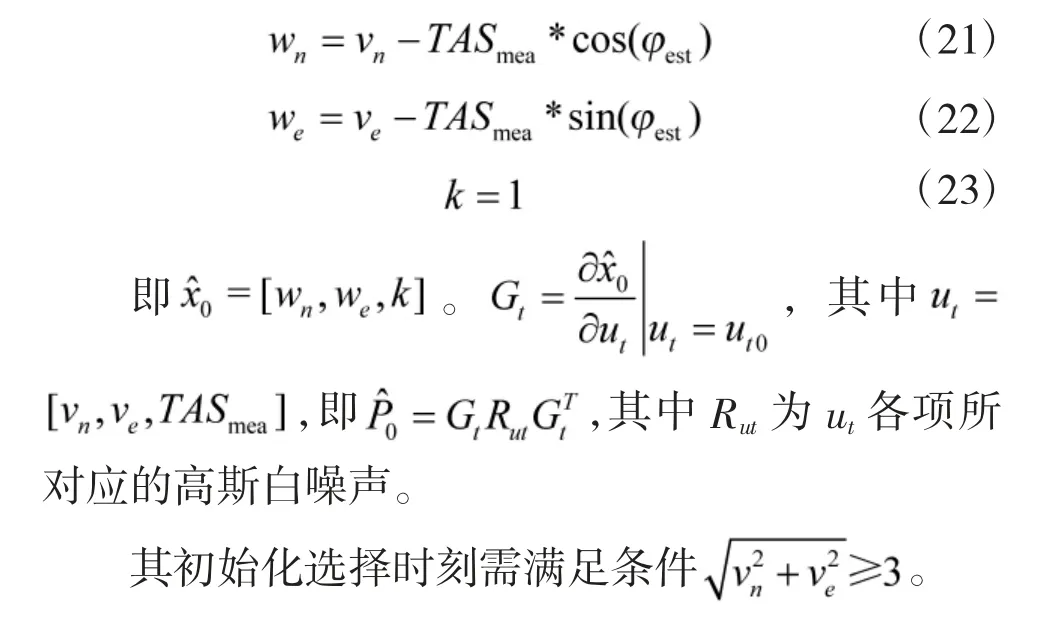
2.4 濾波算法
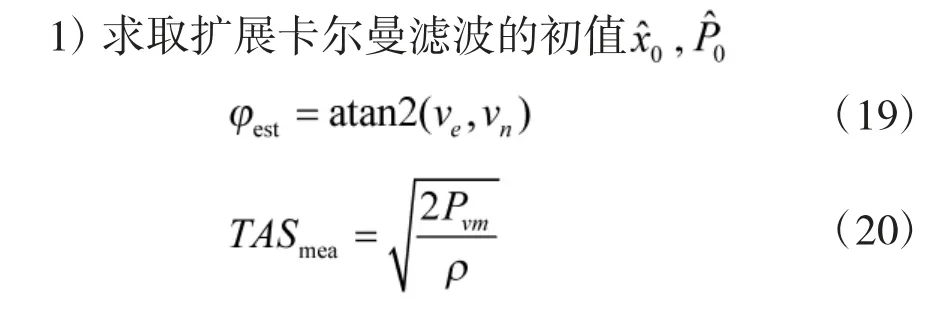
認為初始時刻側滑角近似為0,近似獲得風速信息作為狀態估計的初始值:
2)EKF 的預測方程

而EKF 測量修正方程為:
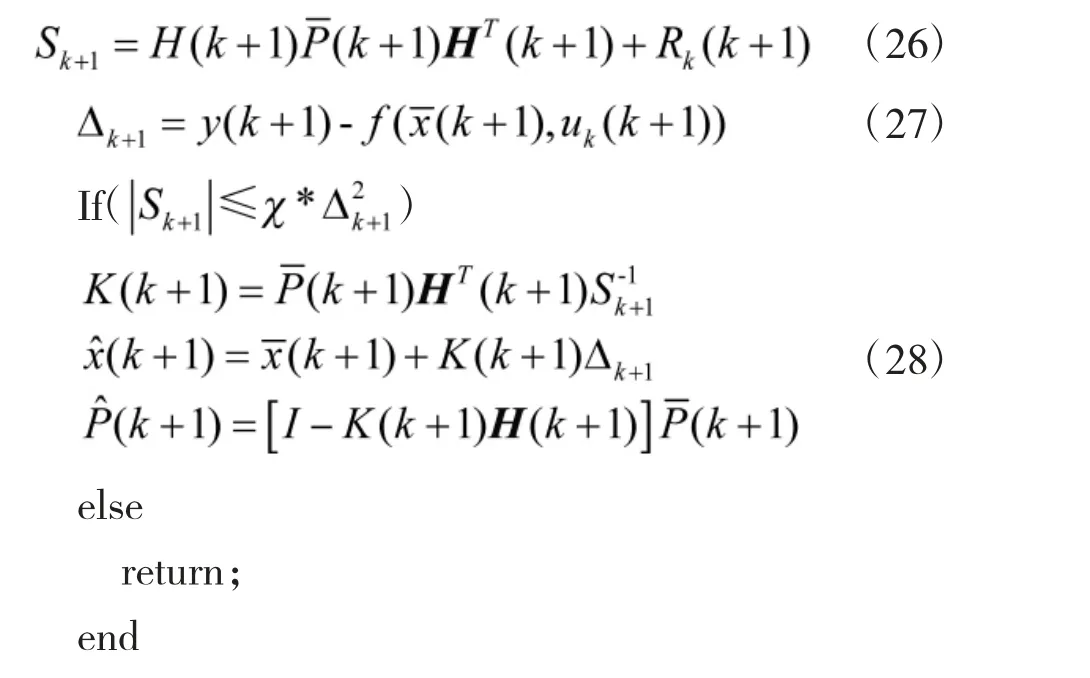
式中,χ 為新息的保護門限值,它以免卡爾曼濾波狀態被錯誤的測量信息所修正,該方法可以提高卡爾曼濾波的魯棒性。
修正完成后求取:
3 仿真實驗及分析
3.1 仿真實驗
通過以上分析,本節進行仿真實驗驗證。其仿真條件為:小型固定翼無人機北向初始速度分量為Vn(0)=-35 m/s,東向初始速度Ve(0)=10 m/s,初始風速為Vw(0)=3 m/s,每隔20 s 增加6 m/s,整個仿真時間持續60 s。初始風向角度為北偏東60°,20 s 后為北偏東30°,在20 s 后再恢復到北偏東60°。
加速度計測量噪聲為0.1 m/s2,動壓測量噪聲為5 Pa,動壓測量尺度因子取為0.96,輸出周期取100 ms,即每100 ms 進行一次卡爾曼濾波校正。
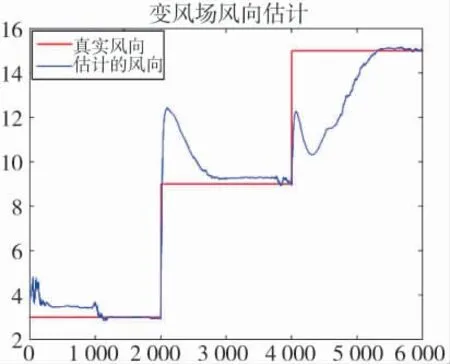
圖2 風速估計值
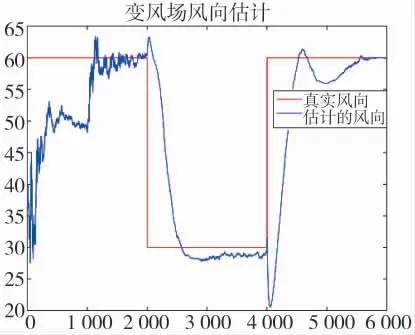
圖3 風向估計值
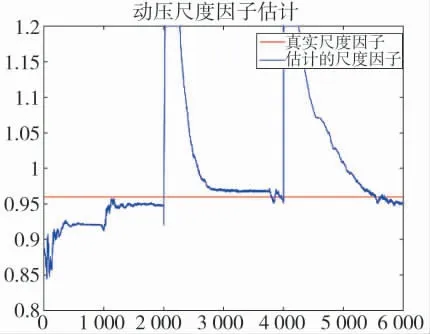
圖4 尺度因子估計值
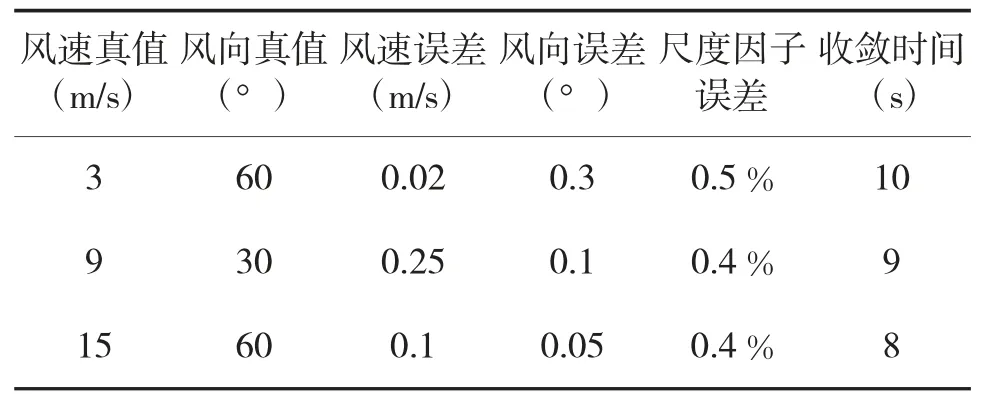
表1 估計誤差統計
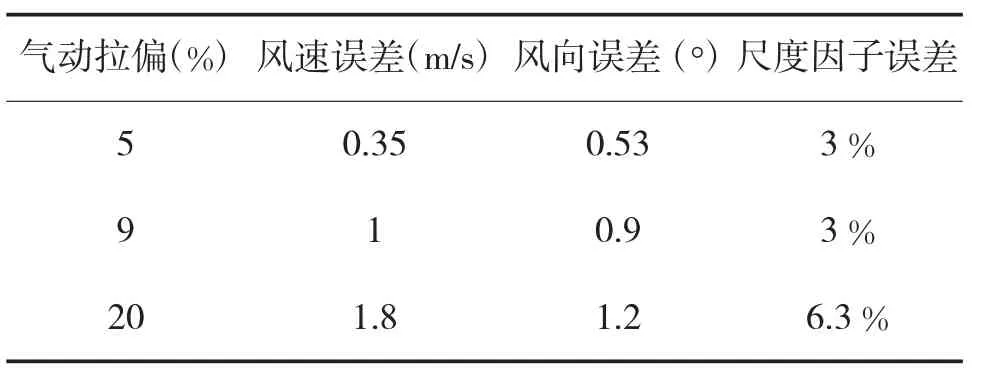
表2 氣動拉偏影響統計

由圖2~圖4 及表1、表2 可知,利用氣動數據與動壓相結合的測量信息可以快速估計出風的矢量信息,有效地在線修正動壓數據的尺度因子,且整個收斂時間在10 s 以內,但是該方法的估計精度由氣動數據的精確性所約束。
4 結論
由圖及仿真數據可以發現,利用離線得到的氣動數據與動壓傳感器相結合,可以在空中實時快速地估計出風速度與風向信息,且可以在線校準動壓傳感器的尺度因子。下一步需要研究如何根據已有的飛行數據和設計方法提高氣動數據辨識的準確度。
猜你喜歡
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
西南交通大學學報(2016年4期)2016-06-15 20:29:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28