基于安全性測試的電網(wǎng)IMS 平臺架構(gòu)優(yōu)化設(shè)計
2021-06-11 03:54:00葛吉剛隋璐捷
電子設(shè)計工程 2021年11期
葛吉剛,趙 婷,陳 璞,隋璐捷
(國網(wǎng)湖北省電力有限公司信息通信公司,湖北武漢 430077)
IMS 作為電網(wǎng)執(zhí)行結(jié)構(gòu),能夠?qū)⒚}沖信號轉(zhuǎn)換為相應(yīng)角位移[1],目前來看,傳統(tǒng)電機作為一種機電能量轉(zhuǎn)換的裝置,在電氣化生產(chǎn)中起著至關(guān)重要的作用。傳統(tǒng)電動機的局限性已經(jīng)不能滿足工業(yè)自動化運動控制系統(tǒng)的要求,步距誤差隨著時間積累逐漸變大,因此,電網(wǎng)IMS 平臺可以實現(xiàn)結(jié)構(gòu)簡單且具有高精確度的電機開環(huán)控制系統(tǒng)。
文獻[2]提出基于故障樹的電網(wǎng)故障診斷方法。構(gòu)建IMS 業(yè)務(wù)故障樹,給出故障診斷流程,通過故障樹知識庫得到故障處理方法。文獻[3]提出基于最短路徑的IMS 路由調(diào)度方法,并根據(jù)對多媒體流的傳輸阻塞概率變化率,優(yōu)化路由調(diào)度路徑,使其滿足電網(wǎng)業(yè)務(wù)實時性要求。
由于各種電機驅(qū)動參數(shù)不同,因此上述方法難以檢測電網(wǎng)電動機受到的攻擊方式,導(dǎo)致步進誤差較大。基于此,提出了基于安全性測試的電網(wǎng)IMS平臺架構(gòu)優(yōu)化設(shè)計。在電網(wǎng)IMS 平臺架構(gòu)核心網(wǎng)絡(luò)中,安全性測試主要針對呼叫會話控制功能,以此處理電網(wǎng)IMS 中指令信號,保證呼叫會話控制功能可滿足平臺代理、查詢和服務(wù)需求。
1 電網(wǎng)IMS平臺總體架構(gòu)優(yōu)化
電網(wǎng)IMS 平臺總體架構(gòu)包含電網(wǎng)通信骨干網(wǎng)、數(shù)據(jù)通信網(wǎng)、邊緣路由器設(shè)備[4]。電網(wǎng)IMS 平臺總體架構(gòu)優(yōu)化設(shè)計如圖1 所示。

圖1 電網(wǎng)IMS平臺總體架構(gòu)優(yōu)化設(shè)計
IMS 設(shè)備部署在匯聚點處,采用口字型網(wǎng)絡(luò)結(jié)構(gòu)上聯(lián)PE 設(shè)備,并配置兩臺組網(wǎng)交換機[5]。分別匯聚IMS 設(shè)備的備用主端口及次端口。經(jīng)過組網(wǎng)交換匯聚后,分別采用外網(wǎng)鏈路上下兩臺IMS 設(shè)備,保護平臺架構(gòu)。圖1 中的C1 點為主節(jié)點,C2 點為備份節(jié)點。當(dāng)C1 點重啟時,通過虛擬路由器冗余協(xié)議技術(shù)實現(xiàn)線路切換,而C2 點為主節(jié)點,當(dāng)感知到C1 設(shè)備故障時,可以快速切換到C2 點鏈路[6]。電網(wǎng)IMS 平臺架構(gòu)屬于機電一體化元件組件,并在使用過程中使用多臺電機協(xié)同工作,實現(xiàn)電網(wǎng)IMS 平臺架構(gòu)啟動、加速和減速的同步控制[7]。
2 電網(wǎng)IMS平臺模塊化架構(gòu)設(shè)計
電網(wǎng)IMS 平臺架構(gòu)以ARM 和FPGA 為核心,采用人機操作界面PC 端上位機和實時控制模塊,同時控制多臺步進電機,使其同步或異步運行。平臺模塊化架構(gòu)設(shè)計如圖2 所示。
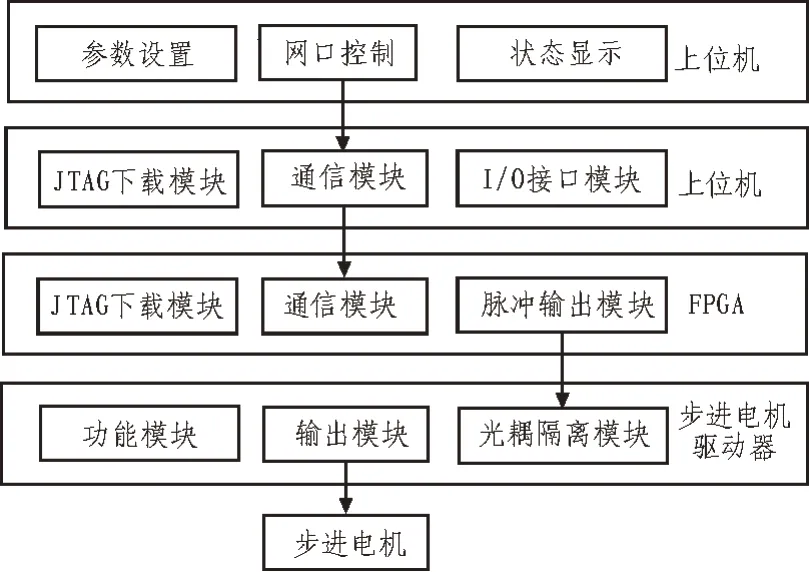
圖2 平臺模塊化架構(gòu)設(shè)計
為提高平臺架構(gòu)開發(fā)效率,縮短研發(fā)時間,在進行平臺架構(gòu)設(shè)計開發(fā)時,采用模塊化設(shè)計方式,降低架構(gòu)開發(fā)難度[8]。根據(jù)多通道電網(wǎng)IMS 平臺實現(xiàn)各個層次的屬性設(shè)計平臺架構(gòu)。
2.1 上位機
上位機按照功能可分為參數(shù)設(shè)置、網(wǎng)口控制、狀態(tài)顯示模塊組成,通過參數(shù)設(shè)置完成對IMS 步進電機通道號的選擇調(diào)整電機頻率;網(wǎng)口控制通過網(wǎng)線連接上下位機,具有數(shù)據(jù)傳輸速度快的優(yōu)勢;上位機與STM32 微控制器之間數(shù)據(jù)的傳輸,具有簡單并且可靠性較高的優(yōu)勢;狀態(tài)顯示是將IMS 步進電機各個參數(shù)通過功能模塊顯示出來[9]。
2.2 STM32微控制器
STM32 微控制器主要包含下載模塊、通信模塊和I/O 接口模塊[10]。下載模塊負(fù)責(zé)將程序?qū)戇M微控制器;通信模塊能夠接收上位機發(fā)送的IMS 步進電機參數(shù),并發(fā)送命令控制;I/O 接口模塊負(fù)責(zé)保障微控制器與FPGA 的通信,以此實現(xiàn)數(shù)據(jù)實時傳輸,并完成數(shù)據(jù)讀寫。
2.3 FPGA
FPGA 是現(xiàn)場可編程門陣列,作為專用集成電路克服原有可編程器件門電路的缺陷。以硬件描述語言為電路簡單布局,快速燒錄至FPGA進行研究,以此實現(xiàn)邏輯門電路設(shè)計。邏輯門電路設(shè)計如圖3所示。
圖3中,T1表示工作管;T2表示負(fù)載管,兩者都表示增強型器件。如果工作管和負(fù)載管同時進行輸出操作,則說明其解決了開啟電壓的控制問題。負(fù)載管柵極與漏極之間使用相同電源,因而T2表示其工作在恒流區(qū)。當(dāng)輸入電壓為高電壓時,工作管導(dǎo)通,此時輸出電壓為低電壓,工作管和負(fù)載管兩管導(dǎo)通時所呈現(xiàn)的電阻值決定了輸出電壓值。當(dāng)輸入電壓為低電壓時,T1工作管截止,此時輸出電壓為高電壓[11]。負(fù)載管導(dǎo)通電阻為非線性電阻,隨著工作電流變化而發(fā)生改變[12]。

圖3 邏輯門電路
根據(jù)需要將可編輯FPGA 內(nèi)部邏輯塊連接起來,實現(xiàn)復(fù)雜可編輯邏輯器件設(shè)計。現(xiàn)場可編程門陣列FPGA 能夠?qū)崿F(xiàn)IMS 步進電機啟動、加速、停止等狀態(tài)之間的功能轉(zhuǎn)換[13]。
2.4 步進電機驅(qū)動器
步進電機驅(qū)動器包括光耦隔離、功率放大以及模塊輸出[14-16]。模塊輸出負(fù)責(zé)驅(qū)動電機的運行,而光耦隔離功能能夠接收FPGA 傳送過來的脈沖信號,并進行功率放大。
四相步進電機驅(qū)動器設(shè)計如圖4 所示。
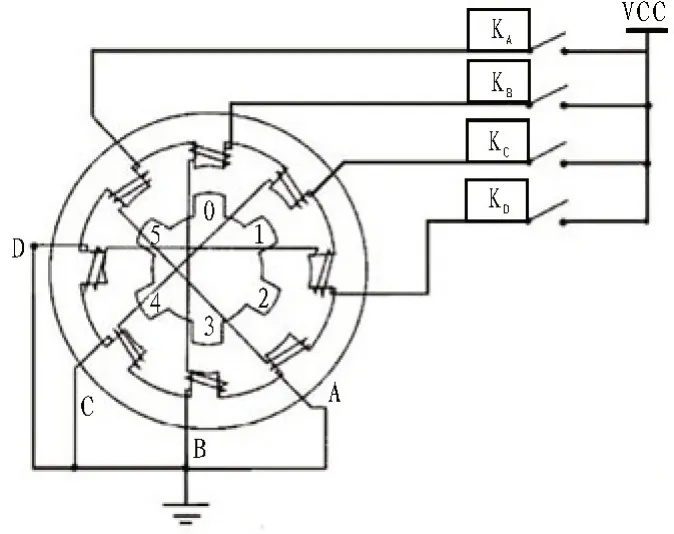
圖4 四相步進電機驅(qū)動器
步進電機驅(qū)動器采用單極性直流電源供電,按照合適時序通電,就能使步進電機步進轉(zhuǎn)動。四相步進電機步進原理如下所示:接通開關(guān)電源,KA、KC、KD斷開,B 相磁極和轉(zhuǎn)子0、3 對齊;當(dāng)接通SC 電源時,KB、SC、KD斷開,C 磁力線和轉(zhuǎn)子1、4 對齊。
步進電機進行閉環(huán)控制,能夠?qū)崿F(xiàn)相對位移測量,選擇FPGA 作為電網(wǎng)IMS 平臺架構(gòu)主要優(yōu)勢,實現(xiàn)電網(wǎng)IMS 平臺架構(gòu)閉環(huán)優(yōu)化控制設(shè)計。
3 安全認(rèn)證功能研究
電網(wǎng)IMS 平臺架構(gòu)優(yōu)化設(shè)計充分利用硬件,完成平臺控制要求,依據(jù)軟件功能,可將其大致劃分為功能模塊和通信模塊兩部分。
軟件總體功能設(shè)計可完成PC 端上位機界面開發(fā),通過選擇各電機通道,完成步進數(shù)設(shè)置,依次發(fā)送控制命令,將上位機發(fā)送來的步進電機參數(shù)進行轉(zhuǎn)換處理,并將處理結(jié)果發(fā)送給FPGA,將傳送過來的傳感數(shù)據(jù)與控制命令結(jié)合,實現(xiàn)電機閉環(huán)控制。通過安全測試協(xié)議實現(xiàn)上位機通信,完成數(shù)據(jù)信息交換。
3.1 多私鑰IMS身份安全認(rèn)證
電網(wǎng)IMS 平臺架構(gòu)綜合交換網(wǎng)是多媒體業(yè)務(wù)通信網(wǎng)絡(luò),也是應(yīng)用最廣泛的通話業(yè)務(wù)。根據(jù)電網(wǎng)IMS 安全性和實時性,設(shè)計多私鑰IMS 身份安全認(rèn)證。多私鑰IMS 身份安全認(rèn)證流程如圖5 所示。

圖5 多私鑰IMS身份安全認(rèn)證流程
多私鑰IMS身份安全認(rèn)證具體實現(xiàn)流程為:①平臺架構(gòu)初始化,完成密鑰參數(shù)初始化;②密鑰生成,當(dāng)某個用戶體驗設(shè)計連接IMS 電網(wǎng)時,需先向密鑰生成器發(fā)送公私密鑰請求,再建立連接密鑰。由此生成的密鑰與門限對比,判斷信任度;③認(rèn)證過程中,需先進行會話消息簽名,并發(fā)送認(rèn)證請求,再利用自己私鑰和發(fā)送公鑰進行簽名認(rèn)證;④數(shù)據(jù)加密和簽名處理,待密鑰協(xié)商后,通過數(shù)據(jù)加密算法實現(xiàn)通信數(shù)據(jù)完整性的保護。若認(rèn)證成功,則利用共享密碼進行解密,進而獲取明文消息。
3.2 電網(wǎng)IMS功能設(shè)計
在電網(wǎng)IMS 功能設(shè)計過程中,應(yīng)利用人機交互操作界面完成對各個步進電機相應(yīng)運行參數(shù)的設(shè)置。步進電機速度只和脈沖頻率有關(guān),通過控制分頻數(shù)完成步進電機速度控制,并在人機操作界面設(shè)置上,由上位機進行相應(yīng)轉(zhuǎn)換。
利用硬件上位機將界面直觀呈現(xiàn)給用戶,方便用戶設(shè)置參數(shù),進而完成對平臺架構(gòu)的控制。打開上位機人機交互操作界面后,需先點擊串口控制模塊,在參數(shù)設(shè)置模塊中選擇電機通道號。單機發(fā)送后,將設(shè)置好的參數(shù)信息傳送到步進電機中,電機狀態(tài)參數(shù)經(jīng)過計算后,會在上位機界面顯示出來。
3.3 通信功能設(shè)計
RJ45 網(wǎng)線能夠連接微控制器及上位機,根據(jù)安全協(xié)議棧實現(xiàn)數(shù)據(jù)信息交換。通信流程如圖6所示。
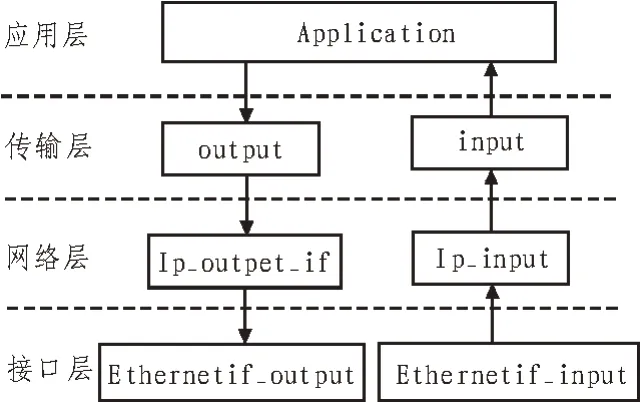
圖6 通信流程
進行網(wǎng)絡(luò)通信時,需對其進行相應(yīng)初始化處理,調(diào)用安全協(xié)議,設(shè)置服務(wù)器IP,在接收完一個鏈路層數(shù)據(jù)包后,剔除鏈路信息,并轉(zhuǎn)交給處理數(shù)據(jù)包,調(diào)用udp_()函數(shù)接收數(shù)據(jù)包程序初始化,完成電網(wǎng)IMS平臺數(shù)據(jù)通信。
4 實驗分析
從消息流攻擊威脅和解析器攻擊兩個方面測試電網(wǎng)IMS 平臺架構(gòu)優(yōu)化設(shè)計步進誤差。
消息流攻擊威脅可能會造成電網(wǎng)在運行過程中發(fā)生程序錯亂,緩沖區(qū)出現(xiàn)語義錯誤問題,造成程序執(zhí)行狀態(tài)混亂,甚至造成服務(wù)器崩潰。測試消息流攻擊威脅原理是通過主機錯誤消息生成的會話發(fā)起協(xié)議消息,發(fā)送到主機之中,通過網(wǎng)絡(luò)實體推測電網(wǎng)IMS 平臺架構(gòu)抵御消息流攻擊威脅。
在消息流攻擊威脅下,分別將文獻[2]方法、文獻[3]方法與基于安全性測試的電網(wǎng)IMS平臺架構(gòu)進行對比分析。在數(shù)據(jù)讀寫過程中,分析消息流攻擊威脅形式,在該形式下,分析3種架構(gòu)的步進誤差,結(jié)果表1所示。
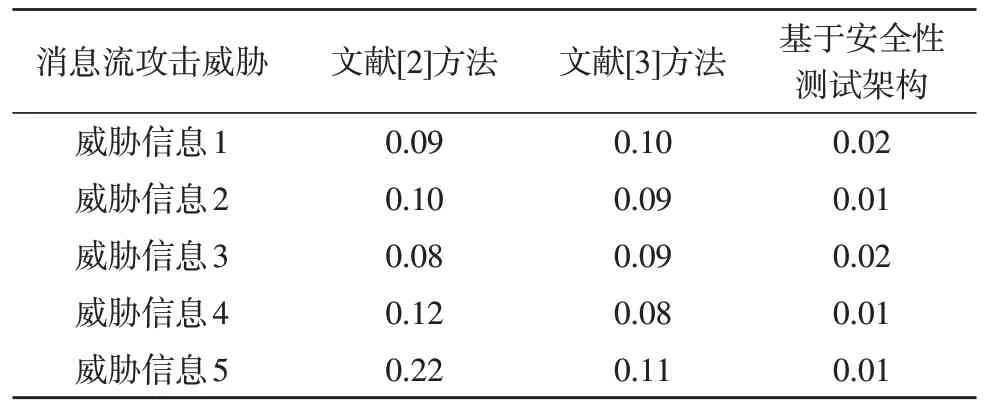
表1 消息流攻擊威脅下3種架構(gòu)步進誤差
消息流攻擊威脅形式如圖7 所示。由表1 可知,在威脅信息5 下,文獻[2]方法的電動機步進誤差達到最大為0.22;在威脅信息5 下,文獻[3]方法的電動機步進誤差達到最大為0.11;在威脅信息1 和威脅信息3 下,基于安全性測試架構(gòu)的電動機步進誤差達到最大為0.02。由此可知,基于安全性測試架構(gòu)步進誤差在消息流攻擊威脅下較小。
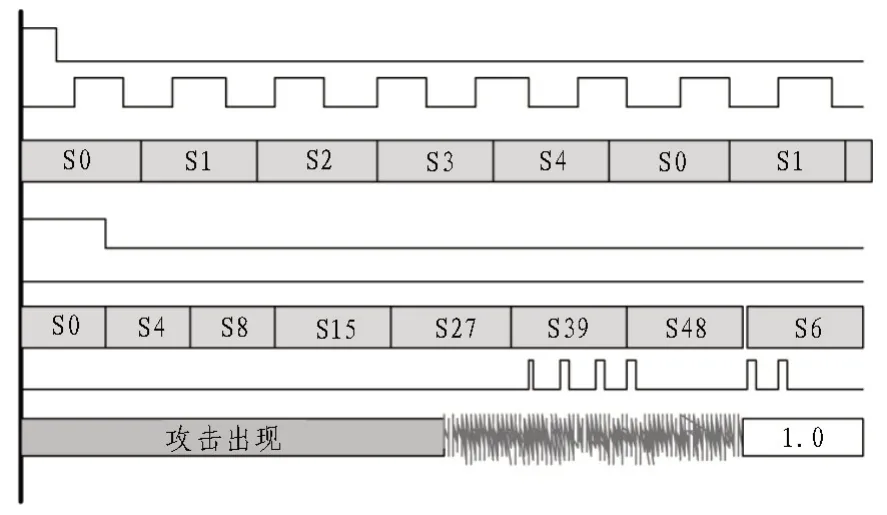
圖7 消息流攻擊威脅形式
5 結(jié)束語
電網(wǎng)IMS 平臺架構(gòu)在無線網(wǎng)絡(luò)中廣泛應(yīng)用,在下一代網(wǎng)絡(luò)中扮演核心控制作用,因此電網(wǎng)IMS 平臺架構(gòu)的安全性至關(guān)重要。而安全性測試作為電網(wǎng)IMS 網(wǎng)絡(luò)中核心指令,電網(wǎng)IMS 安全性在整個電網(wǎng)IMS 平臺架構(gòu)中占據(jù)重要位置。針對不同攻擊所提出的測試方法,設(shè)計了基于安全性測試的電網(wǎng)IMS平臺架構(gòu)。結(jié)合平臺架構(gòu)安全性研究現(xiàn)狀,總結(jié)消息流攻擊威脅和解析器攻擊兩種形式,有針對性地研究平臺架構(gòu)設(shè)計的合理性。
設(shè)計的基于安全性測試的電網(wǎng)IMS 平臺架構(gòu)雖然對攻擊測試評估具有良好測試效果,但是架構(gòu)只預(yù)設(shè)了兩種攻擊方式,因此在未來的研究中,應(yīng)該致力于更多的預(yù)設(shè)模式,使測試系統(tǒng)更加完備。
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
建材發(fā)展導(dǎo)向(2021年14期)2021-08-23 00:57:04
建材發(fā)展導(dǎo)向(2021年23期)2021-03-08 01:05:44
中華養(yǎng)生保健(2020年5期)2020-11-16 01:44:32
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
