基于模塊化組合的機械臂升降平臺設計
2021-06-11 14:26:08張恒
今日自動化 2021年1期
張恒
[摘? ? 要]以模塊化組合的機械臂升降平臺為對象,模塊采用機械臂結構,通過對多種不同工作環境下對支撐設備的需求,在傳統支撐設備的基礎上加以革新,為智能平臺找到適合其工作的用途,針對不同用途進行發散設計,為不同模塊設計統一的接口及供電標準且方便拆卸,通過不同的組合提升模塊使用時靈活性和效率,并為未來實現自動化留下了空間。
[關鍵詞]升降平臺;模塊化; 機械臂
[中圖分類號]TP241 [文獻標志碼]A [文章編號]2095–6487(2021)01–00–02
Design of Robotic Arm Lifting Platform Based on Modular Combination
Zhang Heng
[Abstract]Take the modular combined robotic arm lifting platform as the object. The module adopts the robotic arm structure. Through the demand for supporting equipment in a variety of different working environments, it is innovated on the basis of traditional supporting equipment to find a smart platform suitable for it. The purpose of the work, divergent design for different purposes, the design of unified interfaces and power supply standards for different modules and easy disassembly, through different combinations to improve the flexibility and efficiency of the use of modules, and leave room for future automation.
[Keywords]lifting platform; modular; robotic arm
1 升降平臺的概述
1.1 升降平臺的簡介
升降平臺是一種垂直運送人或物的起重機械,具有重量輕、自行走、電啟動、自支腿、操作簡單、作業面大,能跨越障礙進行高空作業等優點。廣泛應用于高空的安裝、維修,碼頭、物流中心貨物運輸,建筑裝潢等場所,在一些歌劇院,舞劇院,話劇院也都配備著各種升降平臺[1]。
1.2 升降平臺的分類及優缺點
市場上,大型的升降支撐裝置主要通過2種方式實現:一是齒輪齒條式;二是頂升液壓缸式[2]。
1.2.1 齒輪齒條式
齒輪齒條式優點是升降速度快,可連續升降,操作靈活方便。缺點就在于需要龐大復雜的變速機構,體積大,齒輪和齒條材料和制造工藝要求高,動力驅動部分結構復雜,容易發生故障。
1.2.2 頂升液壓式
頂升液壓式優點是運行過程中能方便地進行無級調速,調速范圍大低速性能好;易于實現過載保護,且液壓介質具有彈性和收縮性能,使系統運行平穩可靠,易于實現標準化、系列化、通用化;缺點在于不能連續升降,步序轉換時有沖擊;升降速度慢。
但這2種傳統升降方式的局限性就在于一旦安裝無法拆卸且作用位置非常受限,不能滿足一些復雜環境或因臨時需要而調用的場景。我們發現將機械臂應用于升降支撐也是一個不錯的選擇。機械臂既能滿足升降的平穩性,并且因其體積不大且也可實現關節模塊化,大大提高了它的優勢。
2 模塊化組合的機械臂升降平臺工作優點
(1)創新性的引入了模塊化思想,令設備具有了更強的適應性。模塊化的設計可針對不同的工作環境裝配不同的配置,能夠更加靈活、高效地適用于不同的工作、生產環境,相較于傳統支撐平臺具有不更換主體,僅改變配件就可執行特定任務的巨大勢,并實現輕量化設計。
(2)模塊采用機械臂結構。機械臂是一種高精度的機械手,其多關節的機械結構有很好的機動性和可控性,因其獨特的操作靈活性,已在工業裝配、安全防爆等領域得到廣泛應用。多關節機械臂在復雜情況下不但可以快速運動,而且可控性高,可以按照預期的規劃路徑完成作業,能夠高效的面對復雜環境。模塊采用機械臂結構,便于根據運動路徑的不同,選用不同的機械臂模塊,模塊化機械臂采用快速安裝結構形式,便于組合安裝,并有利于智能化控制。
(3)不同型號支撐平臺零件從設計之初就實現了互通,能夠實現較低的生產和維修成品,節省開支,增強產品的可維護性,提升核心競爭力。
(4)平臺具有通訊和處理器單元,可以適用于未來的智能工作環境,能夠作為AI模塊的硬件載體,并在未來借助人工智能實現更高效率的自主作業。
(5)具有統一的供電及連接標準,便于后續新模塊的設計,新模塊的加入能提高產品的使用周期,從長遠來看,能有效的防止資源浪費。
(6)具有良好的兼容性和寬容度,甚至可以做到模塊系統的開源化,使更多的人參與到新模塊的設計中去,產生良性循環。
3 模塊化組合的機械臂升降平臺設計
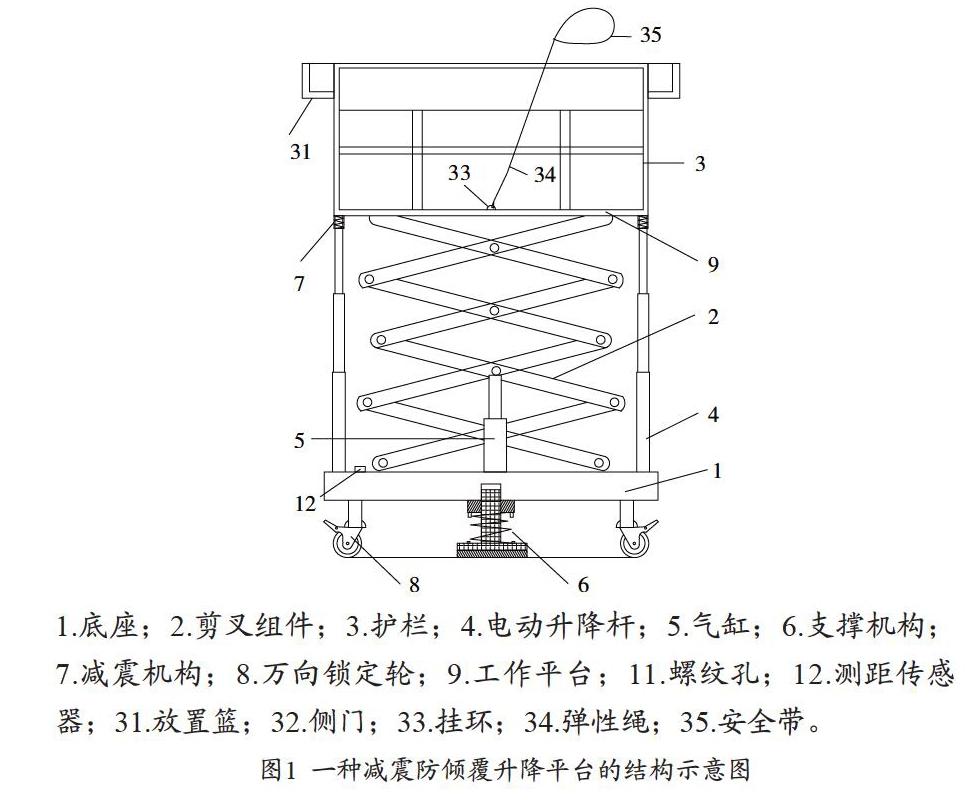
本設計的模塊化組合的機械臂升降平臺是一種減震防傾覆升降平臺,包括底座,底座下表面的四角處分別安裝有萬向鎖定輪,底座下表面4個側邊的中部分別螺紋連接支撐機構;支撐機構包括螺桿、支撐板、鎖緊板和第一彈簧,螺桿的底部垂直一體連接支撐板,螺桿上套有第一彈簧,底座上表面通過剪叉組件連接工作平臺,底座上表面四角處分別螺紋固定一個電動升降桿,四個電動升降桿的頂部與工作平臺固定連接,工作平臺下表面四角處分別螺紋連接一個減震機構,減震機構包括連接板、護筒和第二彈簧,連接板的下表面垂直固定護筒,護筒內設有第二彈簧,第二彈簧套在電動升降桿的頂部;工作平臺的四周固定設置護欄,護欄至少三個側壁的頂部的中間位置向外延伸出放置籃。圖1為模塊化組合的機械臂升降平臺,圖2為工作平臺和護欄的結構。如圖1所示。
如圖1、2所示,本設計提供了一種減震防傾覆升降平臺,包括底座1、剪叉組件2、護欄3、電動升降桿4、氣缸5、支撐機構6、減震機構7、萬向鎖定輪8和工作平臺9。底座1呈矩形板狀,底座1下表面的四角處分別安裝有萬向鎖定輪,設置萬向鎖定輪便于對平臺進行移動,方便使用。且底座1下表面四個側邊的中部分別開設一個螺紋孔11,通過四個螺紋孔11分別螺紋連接支撐機構6。
支撐機構包括螺桿、支撐板、墊板、鎖緊板和第一彈簧,螺桿的底部垂直一體連接支撐板,支撐板的底部固定連接墊板,墊板采用帶有摩擦紋的橡膠墊,以增大與地面的摩擦力,螺桿與螺紋孔螺紋連接,當螺桿旋入螺紋孔底部時,墊板與地面存在間隙,方便平臺的移動。進一步地,螺桿上螺紋連接鎖緊板,支撐時,螺桿向下運動至墊板緊貼地面,擰動鎖緊板,使其向上運動至緊貼底座下表面,可以防止螺桿的松動。進一步地,螺桿上套有第一彈簧,第一彈簧位于支撐板和鎖緊板之間,支撐板的上表面和鎖緊板的下表面固定有限位環,第一彈簧的設置,一方面起到減震作用,另一方面起到彈性支撐的作用。
底座上表面通過剪叉組件連接工作平臺,剪叉組件通過其兩側的氣缸帶動,本設計的剪叉組件屬于現有技術。
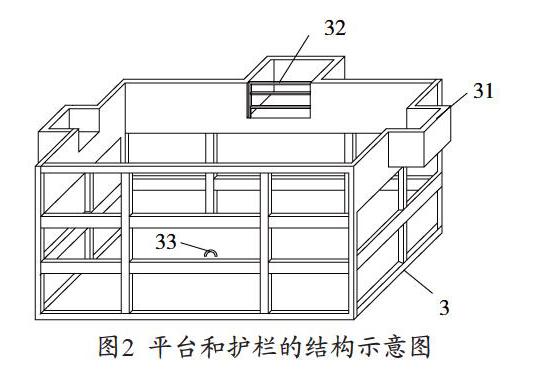
底座上表面四角處分別螺紋固定一個電動升降桿,四個電動升降桿的頂部與工作平臺下表面四角處固定連接,工作平臺下表面四角處分別螺紋連接一個減震機構,減震機構包括連接板、護筒和第二彈簧,連接板的下表面垂直固定護筒,護筒呈圓柱形筒狀,護筒的下表面開設容納電動升降桿穿過的圓形通孔,圓形通孔的孔徑小于護筒內壁的內徑。護筒內設有第二彈簧,第二彈簧套在電動升降桿的頂部。連接板通過多個螺栓固定在工作平臺下表面上。護筒的高度為30~50cm。連接板和護筒采用氯丁橡膠材質。減震機構的設置,一方面起到限位的作用,一方面起到減震的作用。如圖2所示。
電動升降桿配合剪叉組件共同支撐工作平臺,提高了工作平臺升降過程中的穩定性和安全性,同時可以避免人員偏沉造成傾覆的危險。
工作平臺的四周固定設置護欄,護欄的上部采用全封閉式結構,護欄的中部和下部采用柵欄式機構,可以減輕護欄的重量,護欄至少3個側壁的頂部的中間位置向外延伸出放置籃,放置籃用于放置工具筒、工具等,放置籃的內側轉動連接側門。工作平臺的中心處焊接掛環,掛環上掛有多個彈性繩,彈性繩的一端固定掛鉤,另一端固定安全帶,掛鉤鉤在掛環上,所述安全帶系在人的腰間,防止墜落危險。
底座的上端面左側設置有測距傳感器,設置有測距傳感器能夠準確的測量工作平臺的高度,從而能夠提升平臺的使用效率。
4 模塊化組合的機械臂升降平臺工作有益效果
(1)本設計通過4個萬向鎖定輪和4個支撐機構共同對平臺位置進行固定,穩定性更好,安全性更高。其中支撐機構包括螺桿、支撐板、墊板、鎖緊板和第一彈簧,螺桿的底部垂直一體連接支撐板,支撐板的底部固定連接墊板,墊板采用帶有摩擦紋的橡膠墊,以增大與地面的摩擦力,螺桿與螺紋孔螺紋連接,當螺桿旋入螺紋孔底部時,墊板與地面存在間隙,方便平臺的移動。螺桿上螺紋連接鎖緊板,支撐時,螺桿向下運動至墊板緊貼地面,擰動鎖緊板,使其向上運動至緊貼底座下表面,可以防止螺桿的松動。進一步地,螺桿上套有第一彈簧,第一彈簧位于支撐板和鎖緊板之間,支撐板的上表面和鎖緊板的下表面固定有限位環,第一彈簧的設置,一方面起到減震作用,另一方面起到彈性支撐的作用。
(2)電動升降桿配合剪叉組件共同支撐工作平臺,提高了工作平臺升降過程中的穩定性和安全性,同時可以避免人員偏沉造成傾覆的危險。
(3)工作平臺下表面四角處分別螺紋連接一個減震機構,減震機構包括連接板、護筒和第二彈簧,連接板的下表面垂直固定護筒,護筒內設有第二彈簧,第二彈簧套在電動升降桿的頂部。連接板通過多個螺栓固定在工作平臺下表面上。減震機構的設置,一方面起到限位的作用,一方面起到減震的作用。
(4)工作平臺的四周固定設置護欄,護欄的上部采用全封閉式結構,護欄的中部和下部采用柵欄式機構,可以減輕護欄的重量,護欄至少三個側壁的頂部的中間位置向外延伸出放置籃,放置籃用于放置工具筒、工具等,減輕工作人員的負擔,使用方便。
(5)工作平臺的中心處焊接掛環,掛環上掛有多個彈性繩,彈性繩的一端固定掛鉤,另一端固定安全帶,掛鉤鉤在掛環上,安全帶系在人的腰間,防止墜落危險。
(6)底座的上端面左側設置有測距傳感器,設置有測距傳感器能夠準確的測量工作平臺的高度,從而能夠提升平臺的使用效率。
參考文獻
[1] 杜干.升降平臺升降機構研究現狀分析[J].機械工程與自動化,2013,4(2):205-207
[2] 顧建中.三自由度機械臂式升降平臺運動學建模與仿真[J].機電工程技術,2019(12):133-134.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27