基于UWB的礦山智能運輸系統設計
2021-06-13 05:21:40朱實強
世界有色金屬 2021年5期
朱實強
(蘭州城市學院電子與信息工程學院,甘肅 蘭州 730070)
礦山開采在生產過程中需要利用運用大型運輸工具對已經開發出來的礦產資源進行運輸,由于礦產資源產量較大,并且礦山運輸環境比較差,為了保證礦山運輸效率,最初是利用人工調度的方式來控制和管理礦山運輸的位置和狀態。隨著計算機技術與網絡技術的不斷發展與完善,在這種大的科技背景下,礦山開采以及運輸正在朝向智能化、信息化以及數字化方向發展,為了提高礦山運輸效率以及保證礦山運輸過程中的安全,部分學者開始提出對礦山智能運輸系統的研究與設計,并且取得了一定的研究成果,目前現有的礦山智能運輸系統種類比較多,常見且應用效果較好的運輸系統主要有基于人工智能算法的礦山智能運輸系統,以及基于大數據的礦山智能運輸系統,這兩種系統在運輸數據處理方面具有良好的優勢,但是在實際運行過程中礦山智能運輸系統需要依靠無線通信來發送運輸指令和調度指令,并可用無線通信接收到各個運輸設備的運行情況,在該方面傳統系統因無線通信質量較差,經常會出現運輸指令發送延遲,因而導致礦山運輸效率較低,為此提出基于UWB的礦山智能運輸系統設計。
1 基于UWB的礦山智能運輸系統硬件設計
1.1 UWB無載波通信裝置選型與設計
為了更好的完成系統各個單元與模塊之間的通信,此次在礦山智能運輸系統硬件中設計了UWB無載波通信裝置,UWB無載波通信裝置可以實現近距離的高速度數據傳輸,利用納秒到微秒級的正弦波超寬帶實現數據傳輸,它的應用可以有效提高礦山智能運輸系統數據的傳輸速度[1]。根據礦山智能運輸系統的設計需求,此次選擇JOSD-A2DA型號UWB作為系統的無載波通信裝置,該裝置內部含有FREE RTOS芯片,能夠自動傳輸信息,通信距離為1500m;供電形式為POE,可以利用太陽能進行充電,具有良好的環保性,同時該裝置尺寸大小為12mm×30mm×40mm,易于安裝,并且整體采用塑膠材料制成,不易被損壞[2]。將其安裝在礦山運輸通道的兩側,利用USB接口與電源連接,通過配對將該裝置與系統其它硬件設備以及服務器鏈接。
1.2 傳送裝置選型與設計
此次系統在傳統系統基礎上還對傳送裝置進行了設計,將傳統的運輸工具利用傳輸裝置代替,由系統控制傳送裝置完成對礦產資源的運輸,該裝置結構如下圖所示。
如圖1所示,A表示為自動傳送裝置的導軌滾輪;B表示為自動傳送裝置的載重臂V槽面;C表示為鋼絲繩。d1表示為與裝置基座相連接的連桿,d2表示為與d1相連接的連桿,d3表示為與d2相連接的連桿,其中d1可以在范圍內以基座為軸進行90°的旋轉,d2可以在水平方向上進行180°的旋轉[3]。在計算載重臂的運行角度時,應考慮裝置運輸的傳送物體自重下滑力必須大于本身的摩擦力,摩擦力的最大系數應為0.45。根據力學分析可知,假設上傳與下方各傳送物體時載重臂與地面之間所形成的夾角為21.0°,則坡道與載重臂之間的夾角為35.0°,坡道與地面之間的夾角為62.5°[4]。由于傳送物體放置在載重臂上進行傳送時,必須通過一定的動力推動。因此,在載重臂上增加一個帶有PLC可編程邏輯控制器的滑動小車,從而通過滑動小車對運輸礦產資源起到推動作用。在下放傳送物體時還可以通過改變PLC的控制參數,形成阻滯作用,從而防止礦產資源在運輸的過程中受到重力和角度的影響而出現失速下滑現象[5]。通過一臺工業計算機可以有效控制小車上的PLC裝置,并通過操作臺上的多個按鈕隨意切換不同的控制動作,從而實現不同載重臂的操作畫面。傳送裝置的控制處理器選用數字信號處理器,與上位機之間的連接和通訊通過UWB無載波通信裝置進行同時通信,也可以通過網絡連接進行控制,實現對礦產資源的智能運輸。
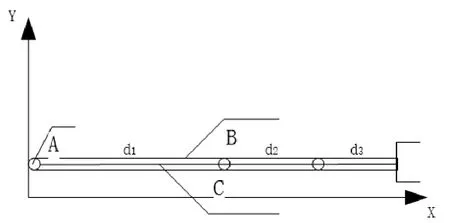
圖1 傳送裝置結構示意圖
2 基于UWB的礦山智能運輸系統軟件設計
根據智能礦山運輸系統的功能要求,此次在系統軟件方面設計了數據采集模塊、運輸狀態分析模塊、運輸調度模塊以及運輸情況實時顯示模塊四大功能模塊,其實現礦山智能運輸過程如下。
第一步:由系統數據采集模塊采集到礦山需要完成的運輸量數據。系統調度中心向數據采集模塊發送指令,該模塊接到指令后自動讀取無線傳感單元采集到的數據,數據采集模塊將采集到的數據傳輸給調度中心。
第二步:調度中心接收到數據后,向運輸狀態分析模塊發送指令,該模塊根據目前系統知識庫中最新的運輸數據對運輸狀態進行分析,計算到運輸裝置空閑的運輸空間。
第三步:運輸狀態分析模塊將處于停止運輸狀態的裝置信息傳遞給運輸調度模塊,由該模塊向外發送運輸執行指令,系統根據生成的指令控制處于停止運輸狀態的運輸裝置開始運行。
第四步:由運輸情況實時顯示模塊將目前礦山運行情況進行展示,供用戶及時查閱礦山運輸情況。利用以上四個功能模塊實現系統的智能運輸,以此完成基于UWB的礦山智能運輸系統設計。
3 實驗論證分析
本文以某礦山作為實驗對象,該礦山需要運輸的礦產資源為5000噸,初步設計該礦山礦產資源需要在3天內完成運輸,實驗利用此次設計系統與傳統系統對該礦山進行智能運輸,實驗將基于UWB的礦山智能運輸系統設定為實驗組,將傳統系統設定為對照組,設計對比實驗。實驗中將UWB無載波通信裝置的通信頻率設定為2.14Hz,將其通信降噪系數設定為1.05,將其運行功率設定為4.5KW。實驗時間設計為5h,在實驗過程中需要傳輸的調度指令數據量為1000bit,實驗利用MKH軟件對兩個系統調度指令延遲時間進行計算和分析,將其作為實驗結果,對兩種系統進行對比分析,實驗結果如下表所示。
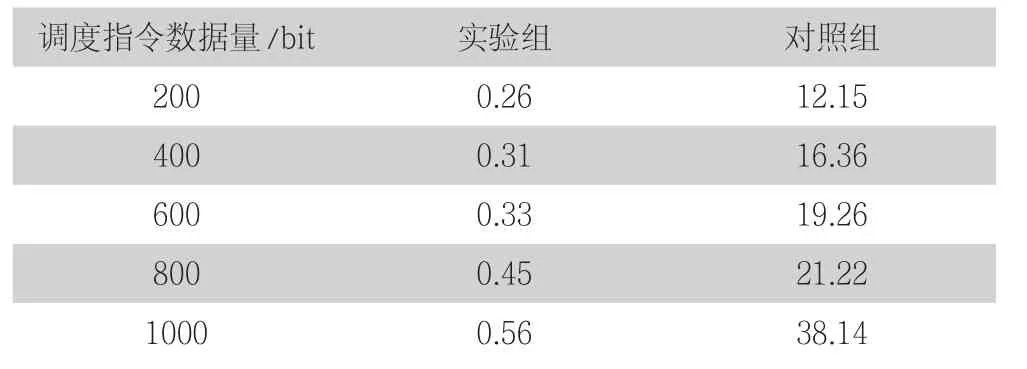
表1 兩種系統調度指令延遲對比(ms)
從上表可以看出,設計系統在運行過程中傳輸指令延遲時間比較短,基本可以控制在1ms以內,可以實現對調度指令的實時傳輸;而傳統系統相比于設計系統,調度指令延遲時間較長,因此實驗證明了設計系統更適用于礦山智能運輸。
4 結束語
本文結合目前礦山智能運輸系統存在的問題,利用UWB技術開發設計了一套新的礦山智能運輸系統,解決礦山智能運輸系統調度指令發送延遲的問題,提高礦山智能運輸效率。此次研究礦山智能化建設和信息化建設具有一定的促進作用,同時有利于無載波通信技術在礦山智能運輸系統中的應用推廣,改善礦山運輸質量,降低礦山運輸成本,具有良好的社會效益和經濟效益。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
文苑(2018年23期)2018-12-14 01:06:06
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26