免棱鏡自動化監測技術的研究與應用
2021-06-13 06:38:36李懷鋒
城市道橋與防洪 2021年5期
李懷鋒
(上海同濟檢測技術有限公司,上海市200092)
0 引言
當前,工程中采用測量機器人即自動全站儀(瑞士Leica、美國Trimble、日本Sokkia等品牌)進行橋梁、隧道、基坑、鐵路、大壩等結構變形位移自動化監測已比較普遍[1-5],但都是針對有棱鏡目標;某新建道路地道工程位于上海軟土地區,施工計劃下穿運營中的高速公路,工程風險大,且全天車流量大,交通管理部門僅允許每周一次上道作業,無法采用常規人工上道進行日常監測。因交通管理部門要求高速公路行車道區域不能布設棱鏡目標,棱鏡目標密度嚴重不足,常規的人工上道日常監測和棱鏡目標的自動化監測系統也難以滿足該工程要求。
大部分自動全站儀都具備免棱鏡測量技術,測距測程幾十米至幾百米不等,該技術已在若干盾構隧道下穿機場飛機跑道、高大滑坡變形位移監測等工程中運用[6-10],但在地道下穿車流量極大的運營高速公路中運用較少。

圖1 高速公路現場俯視圖
針對運營高速公路無法上道作業、車流量大且棱鏡測點密度不足,為保證高速公路行車安全和掌握地道施工階段高速路基位移變形情況,有必要采用基于測量機器人免棱鏡和棱鏡測量技術,研發一套同時滿足棱鏡和免棱鏡測量的自動化監測軟件,不僅能解決該工程存在的實際困難,還能為今后類似地道下穿運營高速工、機場飛行跑道區域等工程提供借鑒。
1 系統構成與開發
自動化監測系統由自動全站儀、監測軟件(現場控制端、云平臺)、觀測站、測點目標(有棱鏡、免棱鏡)、通信設備構成,其中監測軟件屬于核心部分,由現場控制端、云平臺構成。
自動全站儀采用Sokkia NET05AXII測量機器人,測角精度0.5s,無棱鏡模式100m之內可達到1mm+1ppm,具備馬達驅動、目標自動搜索照準等功能,集成Windows CE6.0操作系統,可采用C++、C#等編程語言,可通過串口通信協議根據自己的需求對其進行二次開發;觀測站設在基準點或工作基點,用來固定自動全站儀,可使用交流電或太陽能電板供電;測點目標由棱鏡目標、免棱鏡目標構成,棱鏡目標布設在體現結構物的變形特征點位,且要求固定可靠、不易遮擋,免棱鏡目標應瞄準有效測量距離不長、基本平整區域上;通信設備采用全網通4G通信模塊,傳輸距離不受限且速度快,支持國內三大運營商全部2G、3G、4G頻段的模塊。
1.1 系統設計
當前,市場上普遍采用的基于測量機器人的自動化監測軟件,基本遵循著先學習測量記錄各個棱鏡目標測點初始角度、后按照角度方向依次自動搜索并測量目標方向的技術流程[1-5]。
為確實有效的測量免棱鏡目標測點,在以上流程基礎上進行了部分優化,學習測量時記錄各個測點目標參數(是否棱鏡、棱鏡常數),每次自動測量該點時設置目標測點參數(是否棱鏡、棱鏡常數),之后判斷當前測量距離的有效性,優化后的流程如圖2所示。
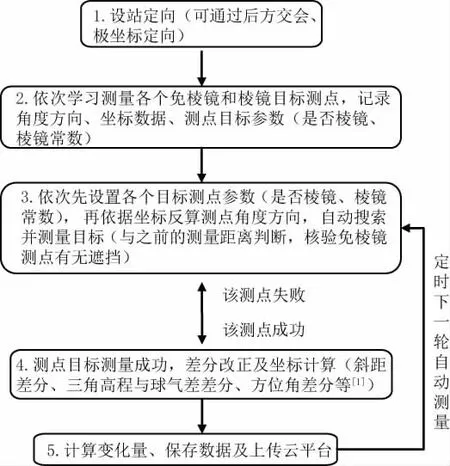
圖2 技術流程圖
其中3、4、5步驟的關鍵代碼如下:
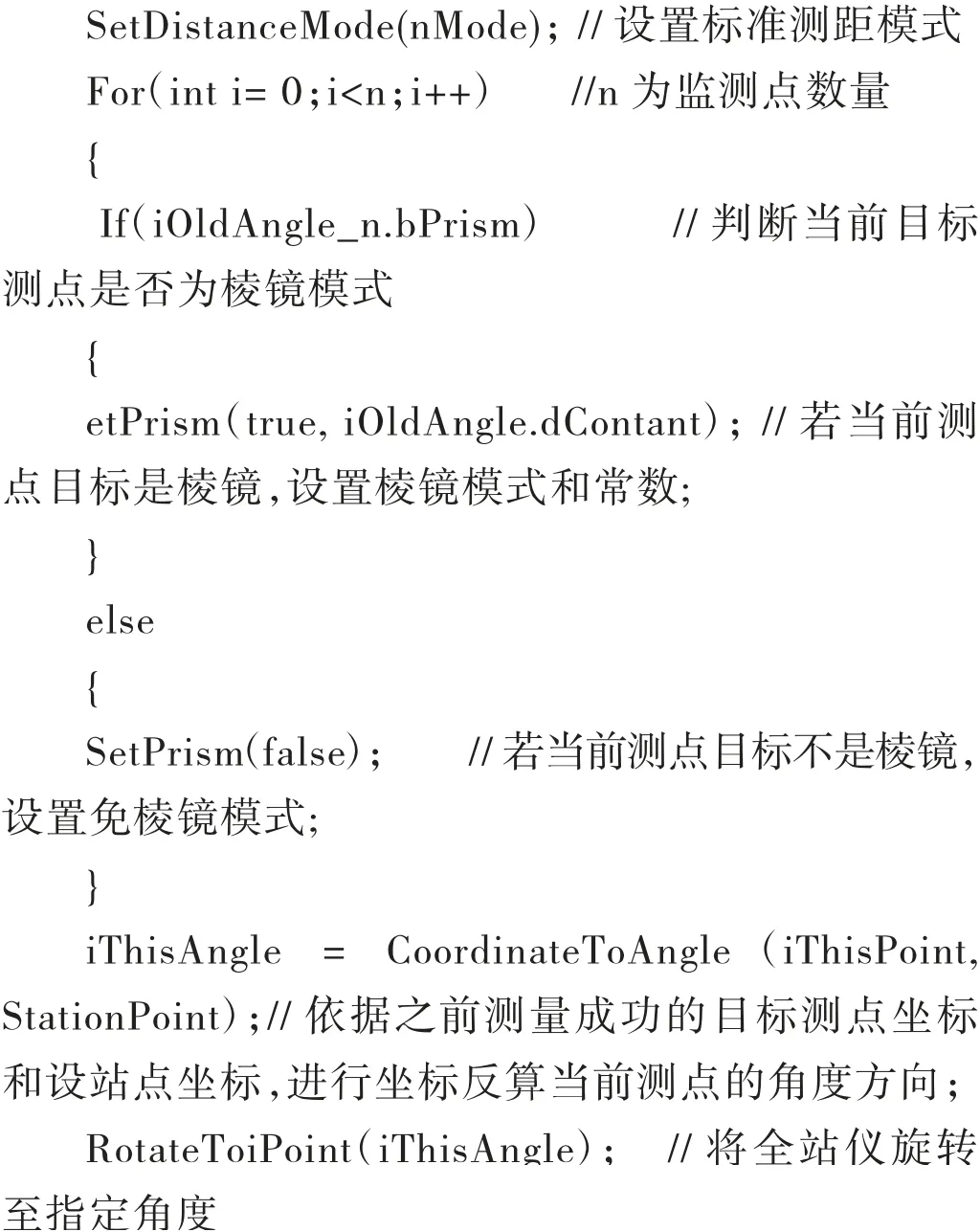
b Survey Result=Survey Point Angle(&i New Angle);//進行測量;若(棱鏡測點、免棱鏡測點)測量成功返回數據,記錄至i New Angle,b Survey Result為True;若棱鏡測點失敗(車流量大引起遮擋,測距失敗),i New Angle為0,b Survey Result為False;標準測距模式下,免棱鏡測點基本上都會測量成功。

Coordinate To Adjusted();//對測量成功的測點進行差分改正(斜距差分、三角高程與球氣差差分、方位角差分等[1])
Caculate Point Defor();//計算測量成功的測點變化量
Write To Data Base();//將測量成功的目標測點坐標和變化量錄入數據庫
GPRS_4G_Write Port();//通過4G網絡將測量成功的目標測點坐標和變化量實時上傳云平臺,并提供短信息預報警功能;
1.2 軟件界面與功能設計
自動化變形監測系統控制端軟件安裝在操作電腦上,通過有線連接或無線通訊與全站儀實現雙向通信,控制端軟件主要有菜單欄、數據曲線展示、數據表格展示、操作信息提示、儀器狀態欄構成,如圖3所示。
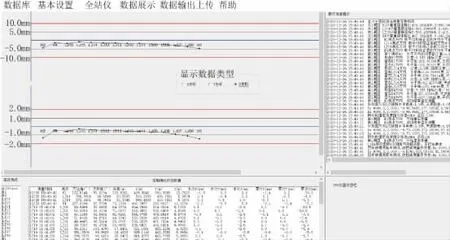
圖3 現場控制軟件主界面
菜單欄部分主要實現數據庫操作、基本設置(測站、測點設置、觀測方法、限差設置等)、全站儀(設站定向、學習測量、自動測量等)、數據展示(單線時程曲線、周期曲線)、數據輸出上傳(另存TXT或報表CSV、上傳云平臺)等功能;數據曲線展示區域主要顯示當前各個測點的X、Y、Z坐標數據的本次變化量、累計變化量曲線圖;操作信息提示主要顯示測量過程中的日志信息,進度提示、中間數據、錯誤信息等;儀器狀態欄顯示儀器的實時狀態信息,電量、是否有效連接通訊、雙軸傾斜偏差等。
自動化變形監測軟件云平臺采用阿里云服務器ECS、云數據庫(RDSMy Sql)和短信息服務等技術,開發功能主要有主界面、監測數據展示、系統管理及設置構成,如圖4所示。
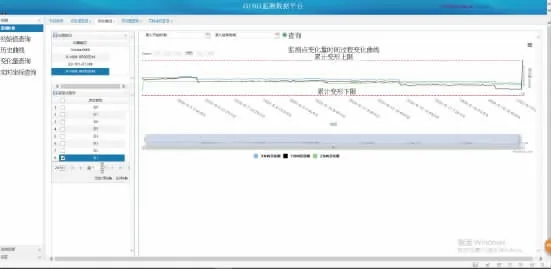
圖4 監測數據云平臺界面
主界面實現測點圖展示、該次變化量和累計變化量預警信息展示等功能;監測數據展示實現初始數據查詢、歷史曲線展示、變化量查詢表格展示、實時坐標查詢表格展示等功能;系統管理模塊實現角色管理、權限管理、修改密碼等功能;設置模塊實現預報警設置、短信息通知號碼、項目信息修改等功能。
2 工程應用
2.1 工程概況和測點布置
某新建道路地道工程位于上海市軟土地區,下穿運營中的高速公路(雙向六車道,路面為瀝青混凝土結構,交通流量大),地道呈南北走向布置,打通因高速公路隔開的斷頭路,包含一條車行地道及兩條人非地道;車行地道為雙向兩車道,結構全長592m,其中暗埋段長306m,南、北兩側敞開段分別長164m、122m;車道地道兩側各布置一條人非地道,結構全長254m,其中暗埋段長158m,南、北兩側敞開段分別長49m和47m。
為確保地道施工期間高速公路的正常運營,在下穿高速公路的約60m范圍內車行及人非地道皆采用頂管施工,其中,車行地道頂管段采用大直徑頂管預制管節,結構外尺寸10.4m×7.5m,內尺寸9.0m×6.1m,管節厚度為700mm;人非地道頂管結構外尺寸為16.0m×4.0m,內尺寸為5.0m×3.0m,管節厚度為500mm。
后視基準點4個均采用棱鏡,位于施工影響外的、通視條件良好的穩定區域;棱鏡目標監測點采用棱鏡,位于高速公路北側路肩及中間綠化隔離帶,共2排30個測點,間距大約5m,如圖5所示;免棱鏡目標采用紅色噴漆標記(5cm×5cm),位于高速公路行車道區域白線相對平整區域,共3排45個測點,如圖5所示;每個測點附近埋設道釘通過人工水準測量進行豎向位移復核。

圖5 觀測站、后視基準點、棱鏡目標測點的現場照片
自動化監測期間,可做到無人值守,當數據有超限、達到預警標準、有突變等情況時,現場控制端軟件會發出蜂鳴響聲預警,云平臺同步發送預警短信息給相應工作人員。
3.2 現場測量數據
該工程中,車行道頂管、兩側人行道頂管分別頂進,前后持續了50多天。車行道頂管從施工前初始值測量、頂進過程中跟蹤測量、完成后延測,下表1數據為選取3個工況節點下(施工前、頂進過程剛到高速隔離帶中間區域下方、頂進完成)的12個典型特征點(6個棱鏡、6個免棱鏡)的豎向位移自動化測量變化量和同時期夜間人工上道二等水準測量的變化量進行比較,數據比較如圖6所示。
2.3 數據對比與分析
從表1和圖6的比較結果可知,3個不同工況節點下12個典型特征點(6個棱鏡、6個免棱鏡)的豎向位移自動化測量和人工水準測量結果,6個棱鏡測點基本一致,大部分較差都在1mm以內,最大較差1.8mm;6個免棱鏡測點同樣基本一致,大部分較差都在3mm以內,最大較差4.4mm。
由此可見,自動化測量與人工水準測量結果基本一致;每一輪自動化測量79個測點,大致耗時65min,人工水準測量僅能每周上道作業一次且耗時4h,且發生交通事故風險極大;綜合比較,自動化測量系統在工作效率、人員安全、人力物力投入等方面,具有明顯的技術優勢。
4 結 論
分析了當前自動全站儀用于自動化變形監測技術的研究背景和利用現狀,總結了研究本自動化監測系統的必要性,研究了監測系統的構成和系統平臺功能設計,提出了全站儀免棱鏡測量技術用以自動化監測的新思路,解決了該工程中存在的實際問題,也達到了信息化監測的效果。
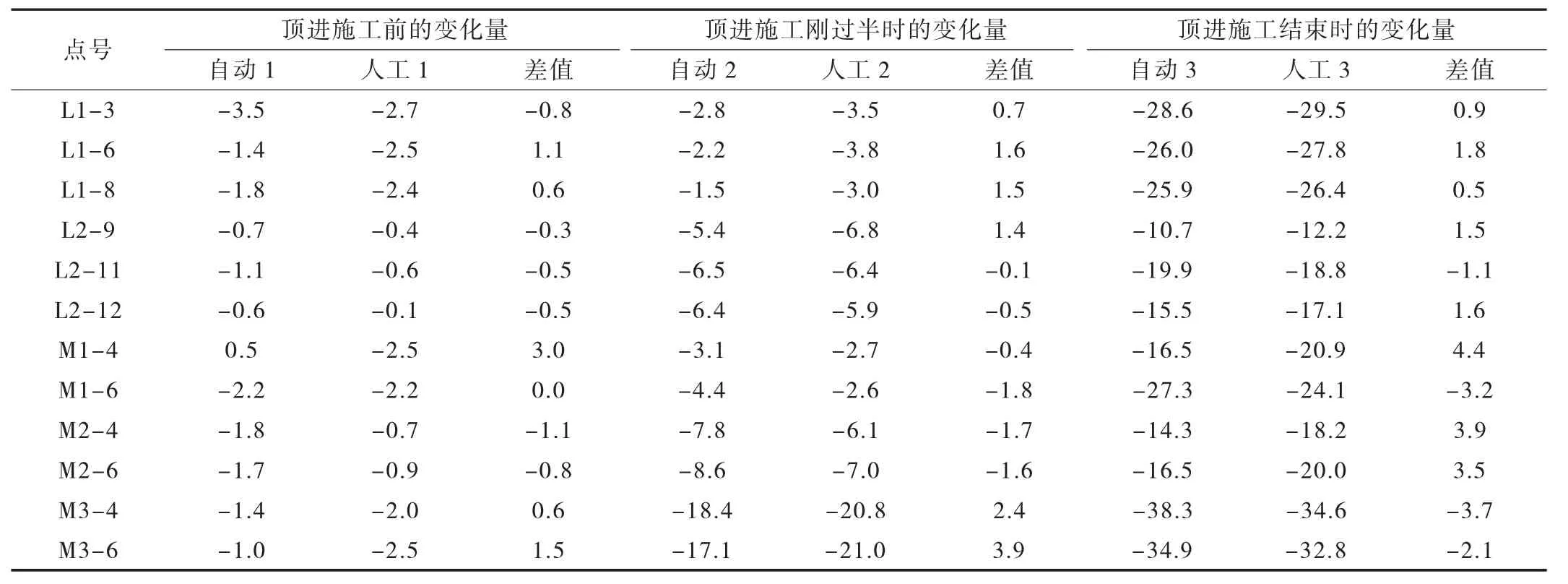
表1 不同工況節點下自動化測量結果與人工測量變化量比較 單位:mm
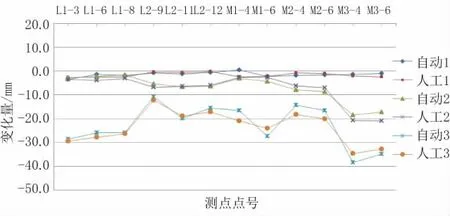
圖6 不同工況節點下自動化測量變化量與人工測量變化量比較(單位:mm)
免棱鏡測量技術用于自動化監測也有一定的局限性,精度有限,僅能實現自動化測量基本平整區域、測量距離不長、精度要求不高(5mm以內)的工程項目的豎向位移,可測量數據變化突變;在該工程中的順利應用和自動化變形測量變化量、人工測量變化量的結果比較,結果表明兩者基本一致(尤其棱鏡目標),但在工作效率、人員安全、人力物力方面具有明顯優勢,可為今后類似下穿運營高速公路、機場飛行跑道區域等工程提供借鑒。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國交通信息化(2016年9期)2016-06-06 07:42:10
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06