應用于紅外眼科疾病檢測的瞳孔定位算法
2021-06-15 09:10:38蔡懷宇婁世良陳文光陳曉冬
中國光學 2021年3期
關鍵詞:區(qū)域
蔡懷宇,史 玉 ,婁世良,汪 毅,陳文光,陳曉冬
(1. 天津大學 精密儀器與光電子工程學院 光電信息技術教育部重點實驗室,天津 300072;2. 上海美沃精密儀器股份有限公司,上海 200237)
1 引 言
目前,全球范圍內(nèi)視覺健康問題嚴峻[1]:視力損傷或失明人數(shù)高達22億人以上,其中至少10億人的視力損傷問題本可預防或尚待解決。有效的眼科疾病檢測對眼部疾病的預防和治療具有重要作用。臨床常用的眼科疾病檢測儀器,如:光學相干層析成像儀(Optical Coherence Tomography,OCT)[2-4]、眼底相機[5-6]等在檢測之前,首先需要將儀器成像光軸對準瞳孔中心點,以保證光源發(fā)出的光經(jīng)瞳孔入射到被檢測者眼內(nèi)。在實際操作中,盡管醫(yī)護人員可通過手動調整實現(xiàn)對準,但是手動對準對操作者的熟練度和被檢測者的配合度均有一定的要求,較為繁瑣耗時。因此,自動化人眼對準顯得尤為重要[7]。自動化人眼對準裝置利用瞳孔定位算法獲取瞳孔中心點坐標,進而借助步進電機實現(xiàn)成像光軸與瞳孔中心的對準,具有實時、高效、操作簡單等特點。其中,瞳孔定位算法的性能對定位結影響最大,因此研究快速、準確、不受噪聲和測量條件(如:局部反射光斑、眼瞼眼睫毛遮擋、離焦模糊)影響的瞳孔定位算法具有重要實用價值。
根據(jù)識別原理,可將瞳孔定位算法分為基于數(shù)據(jù)的方法和基于知識的方法[8]。兩種方法的根本區(qū)別在于瞳孔中心點的判斷準則是否需要根據(jù)先驗知識進行制定。基于數(shù)據(jù)的方法不依靠先驗知識,而是通過對足夠數(shù)量的樣本進行學習,獲取人眼特征,完成人眼定位。常用的方法有支持向量機(Support Vector Machine,SVM)[9-11],卷積神經(jīng)網(wǎng)絡(Convolutional Neural Network,CNN)[12-13],AdaBoost(adaptive boosting)[14-17]等。其中,基于Harr特征的AdaBoost人眼檢測算法應用較為廣泛。該算法利用積分圖和級聯(lián)結構,對一定數(shù)量人眼樣本的Harr特征進行統(tǒng)計學習,定位人眼區(qū)域[17],其能夠極大地改善人眼檢測方法的定位精度和定位速度。基于數(shù)據(jù)的方法對圖像質量要求不高,但是這類方法需要大量訓練樣本,訓練過程復雜,并且定位結果精度較低,只適用于粗略的人眼定位研究,無法滿足紅外眼科疾病檢測設備的精度要求。
基于知識的方法依據(jù)先驗知識制定判斷準則,指導人眼定位。這種方法的定位結果更為準確,在精確的人眼定位中廣泛使用。瞳孔的灰度信息[18-20]、邊緣信息[21-24]、形狀信息[25-30]是常用的判斷準則。Vranceanu等人利用人眼的灰度信息,采用灰度投影函數(shù)定位人眼區(qū)域[18],該方法計算量小但是定位精度較低。張宏薇等人研究了一種改進的基于Hough變換圓檢測的瞳孔識別算法[21],該算法通過限定檢測的半徑范圍,利用Hough變換得到最佳擬合圓,實現(xiàn)瞳孔中心點定位。該算法解決了傳統(tǒng)Hough變換算法計算量大、實時性差的問題,但是當圖像數(shù)據(jù)集發(fā)生變化時,需要重新設置半徑參數(shù),算法的人工依賴度高。Loy等人提出了一種快速徑向對稱變換算法[25],該算法實質上是對Hough變換的改進,通過將映射空間從參數(shù)空間轉化為數(shù)字圖像,有效降低了算法的變換維度,解決了Hough變換由于參數(shù)空間維度過高造成算法復雜度增加,難以滿足實時性的問題。并由Yan等人首次應用到瞳孔中心點的檢測中[26],實現(xiàn)了較好的瞳孔定位效果。但是直接利用該算法進行瞳孔中心點檢測存在兩個不足:算法在大面積范圍內(nèi)搜索,計算成本高;算法的相關參數(shù)需要人工設置,自適應性差。
考慮到人眼對紅外光感知較弱且紅外圖像對比度較高,因此,多數(shù)眼科疾病檢測設備均采用紅外相機對瞳孔進行實時監(jiān)控。在紅外眼科疾病檢測設備完成了機械頭架粗對準和對人眼的軸向調焦后,由于檢測過程存在眨眼、晃動等生理現(xiàn)象,導致人眼圖像仍會存在離焦模糊現(xiàn)象,這就要求瞳孔定位算法對輕微的離焦模糊具有一定的魯棒性。另外,因為被檢測者之間的個體差異明顯以及紅外眼科疾病檢測設備自動對準成像需求,定位算法還需要具有實時性好,精確度高,魯棒性強,并且具備自適應性。
綜合以上情況,在多種非理性情況下,為了使紅外眼科疾病檢測設備實現(xiàn)實時高效自動化的人眼定位,本文提出了一種改進的徑向對稱變換的瞳孔中心點定位算法。首先利用灰度積分投影法融合最大類間方差法對圖像進行二值化處理,完成瞳孔區(qū)域和冗余信息區(qū)域間的粗分割,并結合多團塊篩選條件提取出只包含瞳孔的感興趣區(qū)域(ROI),以減小算法全局性大范圍搜索成本。然后,根據(jù)ROI的最小外接矩形和瞳孔區(qū)域間的幾何關系,結合灰度級形態(tài)學線性濾波,確定搜索半徑范圍,降低算法的人工依賴度。通過在ROI上運行改進后的徑向對稱變換算法,有效修正了傳統(tǒng)徑向對稱變換算法計算復雜度高、自適應性差的缺陷,實現(xiàn)了快速、高效的瞳孔中心點定位。該算法在提高定位速度的同時保證了定位精度,對噪聲有良好的魯棒性,可以滿足多種紅外眼科疾病檢測設備的瞳孔定位算法要求,亦可輔助紅外眼科疾病檢測設備實現(xiàn)人眼結構成像。
2 傳統(tǒng)徑向對稱變換算法
徑向對稱變換算法是以廣義對稱變換為基礎發(fā)展而來的一種基于梯度信息的目標檢測算子。該算法根據(jù)被檢測區(qū)域的梯度幅值信息和梯度方向信息構造出評價區(qū)域對稱性的新指標—徑向對稱度,再采用投票的方式計算被檢測區(qū)域中每一點在給定的搜索半徑n處的徑向對稱度。隨著搜索半徑n的遞增,具有徑向對稱特點的目標區(qū)域在對稱中心處可以累加到較大的徑向對稱度,從而完成目標區(qū)域的檢測。
對于輸入圖像I中每個點P,都可以在其梯度正負方向上得到正投影點P+ve和負投影點P?ve。正負投影點都在以P為中心、以n為半徑的圓上。正投影點P+ve為P點在梯度正方向所指向的點,負投影點P?ve為梯度負方向所指向的點,對應的兩點的計算公式為:
其中g表示圖像I的梯度矩陣,g(p)表示P點的梯度向量[gx,gy],||g(p)||表示P點的梯度幅值;n表示搜索半徑;round表示對所求值進行四舍五入。
根據(jù)上述的像素點投影關系,可以通過計算梯度幅值映射矩陣Mn和梯度方向映射矩陣On統(tǒng)計投影點的累加特性,對應的計算公式為:
其中公式(3)表示在梯度方向映射矩陣On中對P點的正負投影點位置分別+1,?1,代表圖像中每一點P投影到該點的像素數(shù)目;公式(4)表示在梯度幅值映射矩陣Mn中對P點的正負投影點位置分別+||g(p)||, ?||g(p)||,代表圖像中每一點P在該點處幅值的累加。
為了從梯度的方向信息和幅值信息兩方面同時反映圖像的徑向對稱特性,需要計算圖像I的徑向對稱度貢獻矩陣Sn,對應的計算公式為:

其中α表示徑向控制參數(shù),可以根據(jù)不同的需求設定不同的參數(shù)值,一般設定α=2;“*”表示卷積;An是二維高斯卷積核,表示對徑向對稱度貢獻矩陣Sn進行高斯濾波,抑制噪聲的干擾,核尺寸為標準差為0.1·n。
最后將所有搜索半徑下的徑向對稱度貢獻矩陣Sn進行累加平均,計算出最大的徑向對稱度S[i,j]所對應的坐標,確定對稱中心。
可以看出,徑向對稱變換非常適用于檢測對稱區(qū)域。而在人眼圖像中,瞳孔區(qū)域具有高度對稱性,并且從瞳孔區(qū)域到鞏膜區(qū)域,灰度值有明顯的遞增性,表明在瞳孔和虹膜的邊界處有良好的梯度特性。因此,通過徑向對稱變換算法可以方便地定位瞳孔中心。但是一般情況下,人眼圖像存在大面積的平滑區(qū)域及反射光斑區(qū)域。其中,平滑區(qū)域灰度變化均勻,梯度幅值小,對徑向對稱度的貢獻較小,卻會大大增加算法的時間成本。而反射光斑區(qū)域和瞳孔區(qū)域類似,具有明顯的徑向對稱性,且相比于瞳孔區(qū)域,徑向對稱度更高,會對瞳孔中心點的定位精度產(chǎn)生較大的影響。另外,傳統(tǒng)徑向對稱變換算法的搜索半徑范圍n需要人工設置,文獻[25-29]中,都是測試人員依據(jù)經(jīng)驗進行人工設置。然而,人眼的瞳孔大小存在個體差異性,如果測試人員根據(jù)經(jīng)驗設置搜索半徑范圍,可能存在范圍設置過大或設置過小的問題,特別是對于瞳孔區(qū)域沒有采集完整的情況,測試人員可能需要進行多次參數(shù)設置。這在很大程度上增加了算法的計算量和人工復雜度,無法滿足瞳孔定位算法實時性、自適應性的要求。
3 改進的瞳孔定位算法
本文首先利用灰度積分投影融合最大類間方差的方法對人眼圖像進行粗分割,并結合多團塊篩選條件提取出只包含瞳孔的ROI,有效避免了算法由于大范圍運算導致的計算成本高、易受噪聲干擾等問題。然后根據(jù)ROI的最小外接矩形和瞳孔區(qū)域間的幾何關系,結合灰度級形態(tài)學線性濾波,完成了半徑范圍的設置,實現(xiàn)了參數(shù)自適應。最后,在設置的搜索半徑內(nèi)對ROI進行最大徑向對稱度計算,完成瞳孔中心點定位。算法流程如圖1所示。
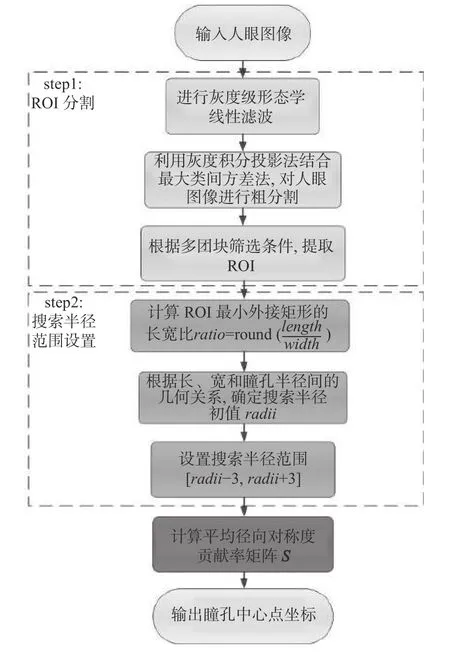
圖1 算法總流程圖Fig. 1 Flow chart of the improved pupil location algorithm
3.1 ROI分割
為了避免人眼圖像中大量冗余信息(如:大面積的平滑區(qū)域以及其他具有徑向對稱特點的區(qū)域)對后續(xù)定位的影響,需要對人眼圖像進行ROI分割,以便提高瞳孔定位的實時性、準確性。考慮到反射光斑主要位于虹膜和鞏膜區(qū)域,因此本文將瞳孔確定為ROI。
最大類間方差法是一種基于全局的圖像分割算法,該算法的優(yōu)點在于不需要人為設置參數(shù),計算量小。但是如果直接利用該方法分割人眼圖像,反射光斑區(qū)域往往會作為目標區(qū)域被提取出來。這主要是由于反射光斑區(qū)域和其他區(qū)域間差別較大,導致分割閾值極易受反射光斑影響,造成感興趣的瞳孔區(qū)域提取失敗。而灰度積分投影法反映的是圖像不同區(qū)域的灰度均值情況,因此可以有效確定出反射光斑、虹膜、鞏膜等所在區(qū)域,從而避免其對分割閾值的影響。為了正確提取ROI,本文首先采用灰度積分投影融合最大類間方差的方法對人眼圖像進行粗分割,再利用多團塊篩選條件提取出只包含瞳孔的ROI,具體處理過程如下。
利用灰度積分投影法對人眼圖像每行、每列的灰度值求和,可以得到豎直、水平投影曲線,分別如圖2(a)、2(b)所示。可以看出瞳孔區(qū)域的投影值在豎直方向和水平方向上均小于各自投影曲線的平均值。基于此,以水平投影平均值、豎直投影平均值為閾值對原圖進行分割,可以去除人眼圖像中的部分噪聲區(qū)域,粗分割結果如圖2(c)所示。根據(jù)人眼圖像灰度特點:瞳孔區(qū)域灰度值最低、虹膜次之、鞏膜最高,對粗分割圖像使用最大類間方差進行二值化,結果如圖2(d)所示。
由圖2(d)可知,經(jīng)過灰度積分投影和最大類間方差法處理后,人眼圖像中仍然存在多個團塊:瞳孔區(qū)域所在團塊,冗余信息所在團塊。其中冗余信息所在團塊多由所受光照較暗的眼角區(qū)域、灰度值存在陡降變化的虹膜鞏膜交界區(qū)域形成。在形狀上,表現(xiàn)為點狀、三角狀和呈對角的弧線狀,點狀團塊的面積(所含的像素點數(shù)目)小于1 000,與瞳孔區(qū)域所在團塊的面積相差懸殊。三角狀和呈對角的弧線狀團塊與瞳孔區(qū)域所在團塊面積相當,但瞳孔團塊相對于其最小外接矩形的占有率遠大于三角狀團塊、弧線狀團塊。各團塊的占有率計算公式為:
其中SBlock表示團塊的面積,SRectangle表示團塊最小外接矩形的面積。

圖2 人眼圖像ROI分割示意圖。(a)豎直投影曲線對照圖;(b)水平投影曲線對照圖;(c)粗分割圖像;(d)二值化圖像Fig. 2 Schematic diagram of ROI segmentation of a human eye image. (a) Vertical projection curve contrast diagram; (b) horizontal projection curve contrast diagram; (c) coarse segmentation image; (d)binary image
基于瞳孔和冗余信息所在團塊間的數(shù)值關系,建立多團塊篩選條件,如下:
(1)計算各團塊的面積,去除面積小于1 000的團塊。
(2)判斷團塊的個數(shù),如果團塊個數(shù)等于1,則該團塊就是包含瞳孔的團塊,繼續(xù)執(zhí)行步驟(4)。如果團塊個數(shù)大于1,則需要進行步驟(3)做進一步的判斷。
(3)計算各團塊相對于其最小外接矩形的占有率。選擇占有率最高的團塊做為包含瞳孔的團塊,繼續(xù)執(zhí)行步驟(4)。
(4)將只包含瞳孔的團塊作為蒙版,與人眼圖像進行數(shù)值運算,獲取人眼圖像的ROI。
(5)提取ROI的邊緣區(qū)域,設置算法的梯度閾值th=0.2max(||g(p)||)。僅考慮梯度值高于閾值的像素點的投影關系,忽略ROI平滑區(qū)域的貢獻。
3.2 搜索半徑范圍的設置
針對傳統(tǒng)徑向對稱變換算法自適應性差的問題,本文提出對ROI做最小外接矩形結合灰度級形態(tài)學線性濾波的方法。應用幾何學知識,可以得到ROI最小外接矩形的長、寬和瞳孔半徑之間的幾何關系,進而基于這一關系設置搜索半徑范圍。但是當睫毛對人眼存在遮擋時,這種方法便會存在較大誤差。睫毛的灰度值與瞳孔相近,ROI的分割結果存在3種情況:只包含瞳孔區(qū)域;包含瞳孔和睫毛的連通區(qū)域;包含瞳孔被睫毛過度分割區(qū)域。在后兩種情況中,ROI分割結果受睫毛影響存在提取過多或過少的問題,導致利用幾何關系進行參數(shù)設置時出現(xiàn)嚴重誤差,進而影響定位精度,結果見圖3。
需要標明的是,這一點極其重要,他在一定程度上回應了上一個部分提出的必然性難題。對人類理性來說,因果性存在于時間序列當中,囿于這一點,自由意志才是與上帝預知相矛盾。實際上,神的領域在永恒當中,所以神意根本不像人一樣被限定在時間序列。既然“永恒當下”敉平了人類時間的三個向度——過去現(xiàn)在未來,那么因果序列在神意那里便完全失效。這也呼應到前文對神意與命運關系的辨析,整個邏輯顯得十分縝密。
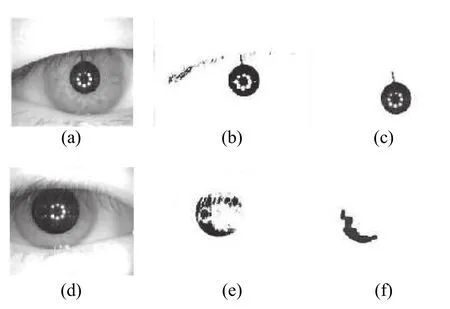
圖3 受睫毛遮擋的ROI提取示意圖。(a)樣本1圖像;(b)樣本1二值化圖像;(c)樣本1的ROI圖像;(d)樣本2圖像;(e)樣本2的二值化圖像;(f)樣本2的ROI圖像,圖像源于數(shù)據(jù)庫CASIA-IrisV4Fig. 3 Schematic diagram of ROI extraction when pupil was obscured by eyelashes. (a) Image of sample 1;(b) binarization image of sample 1; (c) ROI image of the sample 1; (d) image of sample 2; (e) binarization image of sample 2; (f) ROI image of sample 2,images are derived from the CASIA-IrisV4 database
為了解決睫毛遮擋對參數(shù)設置的影響,本文采用線性灰度級形態(tài)學濾波對人眼圖像進行處理。灰度級形態(tài)學運算是二值形態(tài)學運算的擴展,基本操作有腐蝕運算和膨脹運算。人的眼睫毛是線狀,且通常分布在±45°范圍之內(nèi)。基于此,設置線性結構元素如圖4(a)所示,利用構造的線性結構元素對人眼圖像進行腐蝕-膨脹操作。對于ROI圖像中包含瞳孔和睫毛連通區(qū)域的情況,在人眼圖像中表現(xiàn)為睫毛大部分落在虹膜區(qū)域內(nèi),只有尖部的小部分落在瞳孔區(qū)域,如圖3(a)所示。這種情況經(jīng)過膨脹操作后,睫毛區(qū)域的每個像素點經(jīng)過最大值濾波,該點像素值被設置為結構元素區(qū)域內(nèi)的最大值,通常為虹膜區(qū)域的像素值。而對于ROI圖像中瞳孔被睫毛過度分割的情況,在人眼圖像中表現(xiàn)為睫毛大部分都落在瞳孔區(qū)域,如圖3(d)所示。經(jīng)過腐蝕操作后,睫毛區(qū)域的每個像素點經(jīng)過最小值濾波,該點像素的值被設置為結構元素區(qū)域內(nèi)的最小值,通常為瞳孔區(qū)域的像素值。對人眼圖像采用線性灰度級形態(tài)學濾波后,ROI只包括瞳孔區(qū)域,如圖4(b)、4(c)所示。
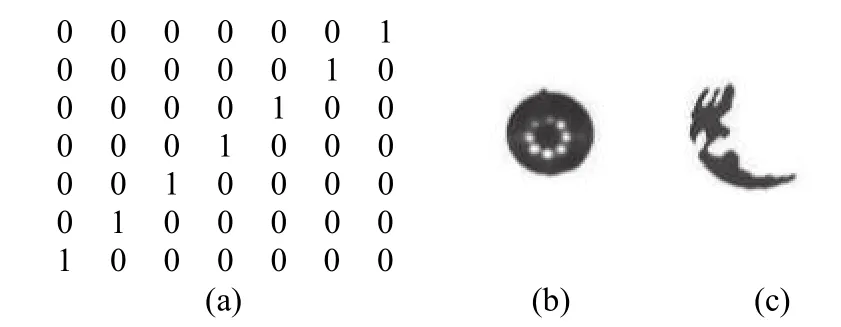
圖4 結合灰度級形態(tài)學濾波的ROI提取示意圖。(a)線性結構元素;(b)樣本1的ROI圖像;(c)樣本2的ROI圖像Fig. 4 Schematic diagram of ROI extraction combined with grayscale morphological filtering. (a) Linear structural element; (b) ROI image of sample 1;(c) ROI image of sample 2
得到去除睫毛干擾的ROI后,采取對ROI做最小外接矩形的方式,設置搜索半徑范圍。由于人眼圖像存在采集不完整的現(xiàn)象,所以ROI的最小外接矩形存在3種情況,如圖5所示。
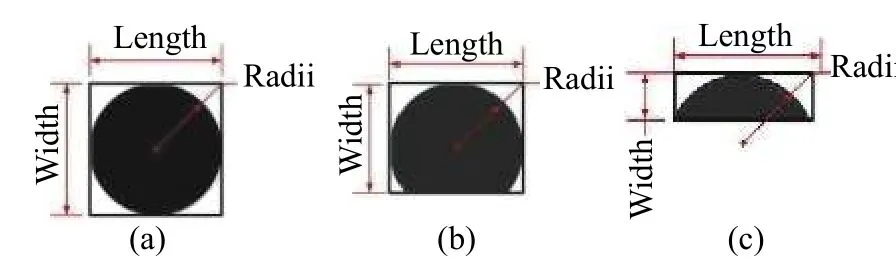
圖5 ROI的最小外接矩形示意圖Fig. 5 Schematic diagrams of minimum circumscribed rectangles of the ROI
利用幾何學知識,通過最小外接矩形的長寬比,確定搜索半徑范圍。設置搜索半徑的規(guī)則如下:
令最小外接矩形的長寬比ratio=round,搜索步長為1,搜索半徑范圍為[radii?3,radii+3]。 當ratio≥0.90時,采集的人眼圖像基本完整,如圖5(a)所示,當0.50<ratio≤0.90時,采集的人眼圖像不完整,但采集的瞳孔區(qū)域占整個瞳孔區(qū)域的面積超過一半,如圖5(b)所示,;當ratio≤0.50時,采集的人眼圖像不完整,且采集的瞳孔區(qū)域占整個瞳孔區(qū)域的面積小于一半,如圖5(c)所示,
在設置的搜索半徑范圍內(nèi),計算ROI的徑向對稱度,可以避免算法進行大面積、大范圍的搜索,從而實現(xiàn)快速、高效、自動的瞳孔定位。首先確定合適的搜索半徑范圍;再計算ROI邊緣區(qū)域中每個搜索半徑下的梯度幅值映射矩陣Mn、梯度方向映射矩陣On以 及徑向對稱度貢獻矩陣Sn。最后對不同搜索半徑下的徑向對稱度貢獻矩陣Sn累加求平均,獲取最大徑向對稱度對應的坐標,將其作為瞳孔的中心點坐標并根據(jù)不同搜索半徑下的最大徑向對稱度確定瞳孔半徑。為了解決瞳孔中心點不在圖像采集區(qū)域內(nèi)導致算法失效的情況,本文在使用徑向對稱變換算法時,對統(tǒng)計投影點累加特性的各個矩陣的四周均進行了最大搜索半徑的填充,從而滿足算法迭代過程的空間需求。
4 定位實驗與結果分析
為了驗證本文算法的有效性,利用計算機硬件配置為Intel Core i5-6300HQ CPU,主頻為2.3 GHz,4 GB內(nèi)存,實驗平臺為MATLAB R2016b進行實驗。利用實驗室自研的瞳孔自動化對準裝置采集人眼圖像,實驗包括了CCD相機反射像明顯、離焦模糊、眼瞼睫毛遮擋嚴重等情況,圖像大小為752 pixel×480 pixel,結果如圖6(彩圖見期刊電子版)所示。圖6(a)~6(d)中紅色框標注的區(qū)域為ROI區(qū)域。瞳孔中心定位結果如圖6(e)~6(h)所示,其中紅色十字(圖中和綠色十字重合)表示人工標定的瞳孔中心點(由專家手動標注,取多次標注的平均值),綠色十字表示算法標定的瞳孔中心點,白色圓圈為算法標定的瞳孔邊界。從提取的ROI圖像來看,灰度積分投影融合最大類間方差方法有效提取出了瞳孔區(qū)域,ROI的灰度值范圍為[0, 50],邊界灰度值范圍為[30, 50],滿足感興趣的瞳孔-虹膜邊界灰度值范圍,為后續(xù)定位打下了基礎。從定位結果圖像來看,本文算法對存在各類噪聲的人眼圖像的定位結果與人工標定的中心點基本重合,說明本文算法具有較高的定位精度,對噪聲有良好的魯棒性,適用于多種情況下的瞳孔中心點定位。
此外,本文算法考慮了瞳孔中心不在圖像采集區(qū)域內(nèi)的定位情況,彌補了目前瞳孔中心定位算法研究的空白。本文算法對于瞳孔區(qū)域采集不
完整圖像的定位結果如圖7(彩圖見期刊電子版)所示,由于瞳孔區(qū)域沒有被完全采集,所以在定位結果圖像的四周進行了填充,便于顯示算法的標記結果。從圖中可以看出,算法對于不完整瞳孔區(qū)域邊界的標定基本與真實邊界吻合,定位精度較高。實驗結果顯示,本文算法可以對瞳孔區(qū)域不小于30%的人眼圖像進行定位。
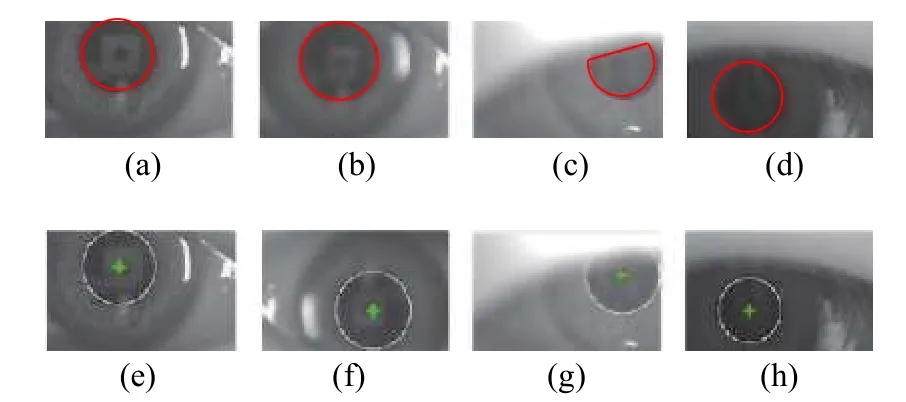
圖6 (a)~(d)為瞳孔定位結果圖;(e)~(h)為人眼圖像定位結果Fig. 6 (a)~(d) Pupil positioning; (e)~(h) localization of human eye

圖7 不完整瞳孔區(qū)域圖像的定位結果圖。(a)~(d)人眼圖像; (e)~(h)定位結果Fig. 7 Incomplete pupil area image positioning. (a)~(d)Images of human eye; (e)~(h) localization of human eye
為驗證本文算法的定位效果,將該算法與同樣基于投票思想的利用圖像梯度信息的傳統(tǒng)徑向對稱變換算法[26]、基于梯度均值的定位算法[30]進行對比。將3種方法應用于60幅實驗室搭建的瞳孔自動化對準裝置采集的人眼圖像,部分實驗圖像的對比結果如圖8(彩圖見期刊電子版)所示。其中,紅色十字為人工標記的瞳孔中心點,綠色十字、藍色十字、黃色十字依次為上述3種算法定位的瞳孔中心點,白色圓圈為算法標定的瞳孔邊界。
為了定量比較3種算法性能,使用定位時間和定位誤差對人眼圖像的定位結果進行量化分析。定位誤差反映的是人工標定的瞳孔中心和算法標定的瞳孔中心之間的歐氏距離,其值越小表明算法的定位精度越高。本文考慮到人工標定的平均誤差為8.424 pixel,因此設置當算法的定位誤差在8 pixel內(nèi)時,認為算法定位準確。算法對比結果見表1。
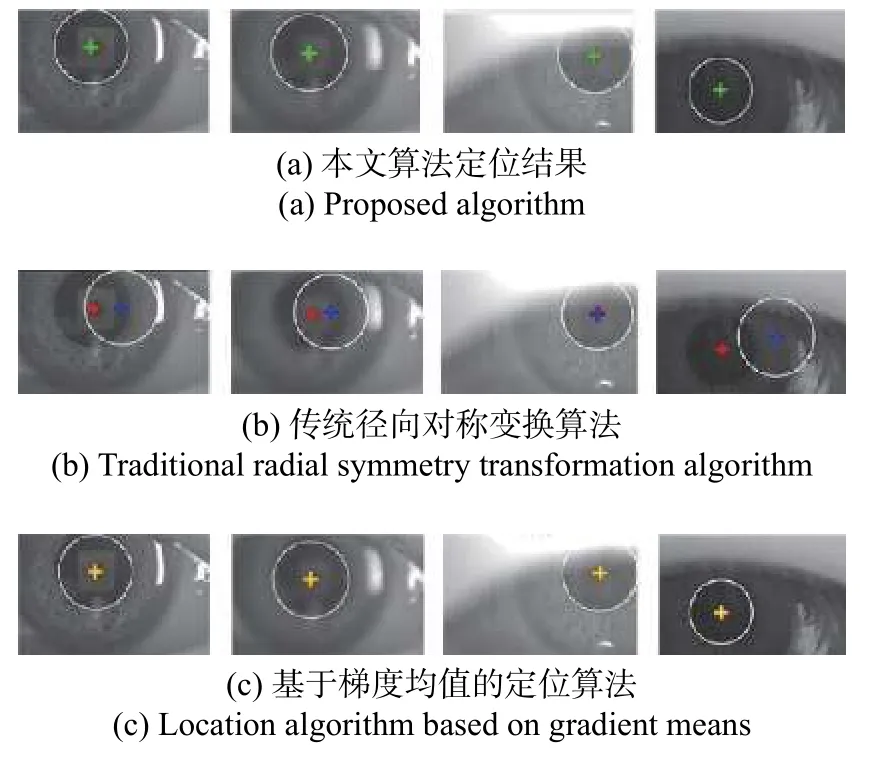
圖8 3種定位算法結果對比Fig. 8 Comparison of localization results by three different algorithms
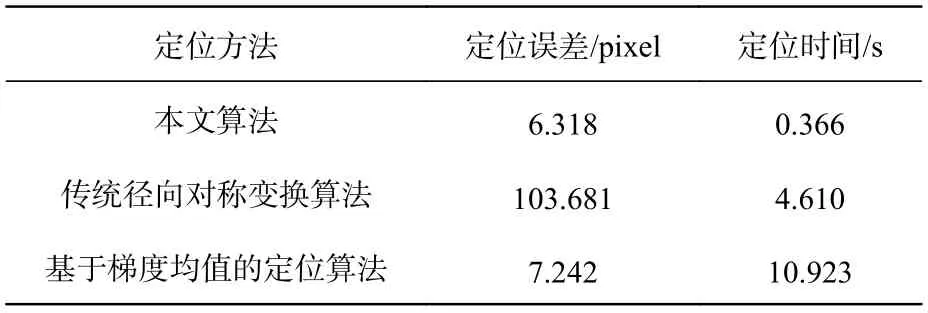
表1 3種算法的精確度和實時性比較Tab. 1 Comparison of accuracy and real-time performance of three algorithms
通過比較3種算法的定位結果,可以看出本文算法和基于梯度均值的定位算法確定的瞳孔中心點非常接近人工標定的中心點位置,但是傳統(tǒng)徑向對稱變換算法出現(xiàn)了較大的偏差。這主要是由于圖像中除了具有徑向對稱特點的瞳孔外,還存在反射光斑、眼瞼等其他具有徑向對稱特點的區(qū)域,并且這些區(qū)域邊緣處梯度值高,相比于瞳孔區(qū)域,徑向對稱度貢獻更高,從而對瞳孔的定位結果產(chǎn)生影響,導致定位精度降低。而基于梯度均值的定位算法通過后處理,去除了高梯度值區(qū)域,有效避免了眼瞼、反射光斑等噪聲對瞳孔定位的影響。但是算法復雜度較高,實時性不好。
本文采取ROI分割、搜索半徑范圍設置對傳統(tǒng)徑向對稱變換算法進行了改進,由表1可知,本方法的平均定位時間為0.366 s,平均定位誤差為6.318 pixel,與采集的人眼圖像的瞳孔區(qū)域相比,平均定位誤差比例為1.63%。從表1可以看出,相比于傳統(tǒng)徑向對稱變換算法,本文方法的定位精度提高了16倍,定位時間減少了92%,表明本文算法在保證高精度瞳孔定位的同時,具有較高的速度。可以滿足眼科應用對于瞳孔定位算法實時性好、魯棒性強、精確度高并且具有自適應性的要求。
為了進一步驗證本文方法的適用性,采用CASIA-IrisV4數(shù)據(jù)庫進行實驗。CASIA-IrisV4數(shù)據(jù)庫的圖像都是在近紅外光照射下或者在合成光照射下采集的,特點是存在睫毛遮擋、瞳孔尺度不一、反射光斑位于瞳孔區(qū)域內(nèi)且有明顯對稱性,圖像大小為320 pixel×280 pixel。選取200張圖像進行實驗。部分實驗結果圖像如圖9(彩圖見期刊電子版)所示。可以看出本文算法對各種情況下的瞳孔都能實現(xiàn)精確定位。而傳統(tǒng)徑向對稱變換算法的定位結果受反射光斑影響明顯,這主要是由于該算法在確定對稱中心時需要對整幅圖像在較大半徑范圍內(nèi)進行搜索,而圖像中紅外照明光源的反射光斑位于瞳孔區(qū)域內(nèi),且形狀表現(xiàn)出明顯的對稱性,因此反射光斑區(qū)域成為算法徑向對稱度的主要貢獻區(qū)域,進而導致傳統(tǒng)徑向對稱變換算法定位結果出現(xiàn)較大誤差。
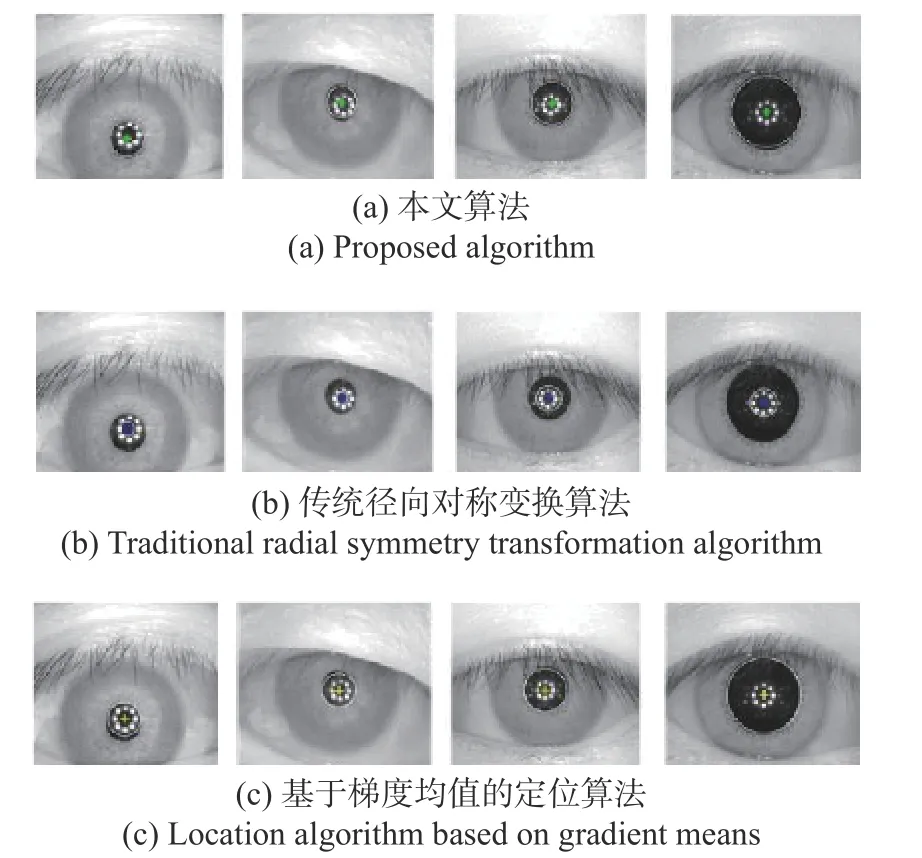
圖9 3種算法在CASIA-IrisV4數(shù)據(jù)庫的定位結果Fig. 9 Comparison of localization results by three different algorithms in CASIA-IrisV4 database
采用定位準確率、定位時間對3種算法的適用性進行客觀評價。定位準確率的含義是如果算法的定位誤差在8 pixel以內(nèi),則認為算法對于該圖像的定位結果是準確的。實驗結果如表2所示,可以看出,相比傳統(tǒng)徑向對稱變換算法和基于梯度均值的定位算法,本文方法的定位準確率更高,說明本文方法適用于大多數(shù)個體的瞳孔定位。
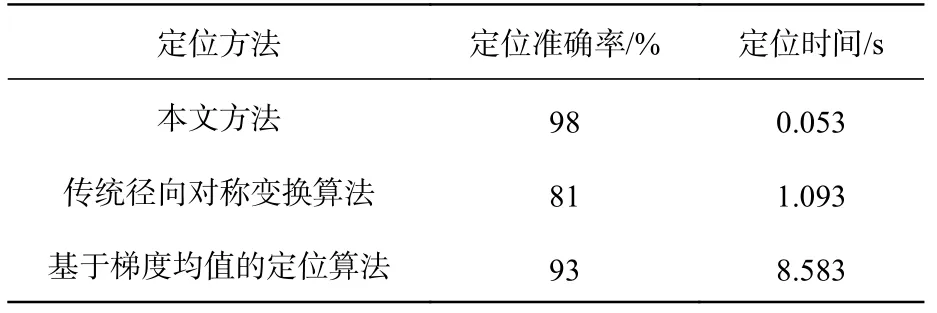
表2 3種算法適用性比較Tab. 2 Comparison of applicability of three algorithms
5 結 論
本文根據(jù)紅外眼科疾病檢測設備對于眼部對準成像的需求,提出了一種基于徑向對稱變換的瞳孔中心點定位算法。首先利用灰度積分投影結合最大類間方差對人眼圖像進行粗分割,并通過多團塊篩選條件,完成了對人眼圖像的ROI分割。再根據(jù)ROI的最小外接矩形和瞳孔區(qū)域間的幾何關系,并結合灰度級形態(tài)學線性濾波,減小了睫毛遮擋對參數(shù)設置的影響,確定了搜索半徑范圍。最后,利用改進的徑向對稱變換算法進行瞳孔中心點定位。
實驗證明,本文算法的定位誤差在8 pixel以內(nèi),平均定位時間為0.366 s。相較于傳統(tǒng)徑向對稱變換算法,定位精度提高了16倍,定位時間減少了92%。可以看出,本文算法有效修正了傳統(tǒng)徑向對稱變換算法計算成本高、自適應性差、易受其他具有徑向對稱特點的噪聲區(qū)域(如反射光斑、眼皮)干擾的缺陷。另外,由實驗結果可知本文算法適用于離焦模糊、睫毛遮擋、反射像明顯等噪聲嚴重的人眼圖像定位,并且對于瞳孔中心不在圖像采集區(qū)域內(nèi)的情況也依然適用。該算法基本滿足紅外眼科疾病檢測設備對于自動定位對準裝置的要求,有助于輔助多種紅外眼科疾病檢測設備高效精確地進行眼組織成像。但目前,本文算法對于一些出現(xiàn)瞳孔變形的病眼的定位性能仍有待進一步研究,在以后的研究中會考慮在算法中加入變形程度判定模塊,進而采用多方法定位來提升變形瞳孔的定位效果。
猜你喜歡
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農(nóng)墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經(jīng)大學學報(2015年3期)2015-12-10 03:49:15
