動車組的多變量非線性預測控制研究
2021-06-18 03:29:54李中奇
華東交通大學學報 2021年2期
關鍵詞:模型
耿 睿,李中奇,楊 輝
(華東交通大學1.電氣與自動化工程學院;2.江西省先進控制與優化重點實驗室,江西 南昌330013)
高速列車具有速度快、準時、能耗利用率較高等優點,其中高速動車組包括牽引、制動和惰行等運行工況。研究高速列車動車組的實時精確速度控制問題,對于實現高速列車自動駕駛具有重要的應用價值,也是未來高速列車自動駕駛算法的核心問題[1]。
針對高速動車組運行過程中的建模問題,袁海軍[2]對高速列車進行動力學分析,通過單質點模型建立了特征模型,提出了最優PID控制器,對速度曲線進行了跟蹤。連文博[3]基于單質點模型建立了高速列車的狀態空間方程,通過對傳統PID控制器的改進,將高速列車受干擾最為擴張狀態設計自抗擾控制器,并證明了算法的可行且具有抗干擾性強、追蹤誤差小的優點。劉曉宇[4]通過分析高速列車制動控制過程,建立列車制動過程的傳遞函數模型,反映了控制力產生的動態過程,實驗表明了模型的準確性。上述文獻均通過對高速列車動力學分析建立了單質點模型,但實際中動車組列車均采用了動力分散配置,單質點模型不足以描述動車組各動力車廂的牽引或制動力的分配情況。李中奇[5-6]通過分析單個車廂的受力情況以及制動過程的特點,將速度和制動力的傳遞函數模型與單個車廂的動力學模型相結合,提出了動車組的多質點模型。衷路生[7]通過對列車長度以及對每節車廂的受力進行深入分析建立了高速列車的多質點模型,有效的解決了列車通過變坡點和變曲率點時的速度跳變問題。S ong[8]將車廂間的耦合力看作列車內力,采用單一坐標模型系統來描述列車系統的位移和速度,將多維模型轉化為一維模型,簡化了列車內部的受力情況。Lin[9]通過分析列車車鉤耦合力,將車鉤建模為非線性彈簧跟阻尼器的組合,通過分析高速列車的運行阻力、外界干擾以及建模不確定性因素建立了高速列車的多質點模型。
針對動車組運行過程中的控制問題,傳統的PID控制在參數選擇上依賴人工選取,PID參數往往整定不良,性能欠佳,不利于動車組安全舒適運行。而廣義預測控制將模型與參數估計相結合,對于動車組運行過程中參數時變的問題,易于在線估計參數,同時在發生參數突變問題時,廣義預測控制具備自適應調節能力,可以維持原控制性能不變。李中奇[10]設計了基于極限學習機的廣義預測控制方法,將模型參數通過極限學習機神經網絡直接估計控制器系數,減少了計算量,同時算法具有良好的跟蹤能力。李中奇[11]采用雙自適應廣義預測控制方法,不僅實時更新模型參數而且實時更新控制器參數,實現了動車組制動過程對目標速度的精確跟蹤。
高速動車組實際運行過程中會受到非線性空氣阻力、強風、雨雪天氣等的影響,具有很強的非線性,在面對非線性問題中,戈萌[12]針對高速列車運行過程中存在的輸入非線性、非線性空氣阻力、未知的外部擾動以及執行器故障問題,設計了一種分數階有限時間控制器實現了高速列車對于目標曲線的高精度跟蹤控制。賈超[13]通過分析車間耦合力、非線性阻力、列車運行狀態,建立了非線性多質點模型,并且考慮了多優化目標及運行約束條件等問題,提出了高速列車的非線性模型預測控制。
針對上述問題,在建模方面通過分析牽引制動系統的構成,以及動車組采用動力分散式驅動并由多個動力車廂組成的特點,建立了動車組的多動力單元模型,并將非線性空氣阻力、未知擾動等描述為未建模動態項,通過BP神經網絡實時估計。在控制器設計中,設計了非線性廣義預測控制器并結合動車組現場運行數據進行仿真,驗證了該方法的有效性。
1 動車組的多動力單元模型
動車組是由若干帶有動力的機車與不帶動力的拖車編組而成,我國現有CRH380A型動車組,動力編組形式為6動2拖;目前我國高速動車組的牽引動力形式可分為分布式動力結構和集中式動力結構兩種類型;隨著高速動車組運行速度的不斷提升,動力集中式動車組受到輪軌粘著和功率等因素的限制,缺點暴露無遺,而分布式動力結構將動力分置于每節車輛或大部分車輛中,牽引制動的性能有著明顯的改進。
1.1 牽引-制動系統
分析動車組的牽引-制動系統可知,當司機或ATO裝置發送控制指令,各動車的牽引/制動控制單元接收傳送的控制指令,計算出相應時刻所需的牽引/制動力。
牽引階段,從控制指令的發出,到動車組啟動加速,存在著系統延時;當動車組開始加速,牽引加速度緩慢增長至所需要的目標加速度。
制動階段,目前高速列車在制動階段采取電制動與空氣制動相結合的形式,在動車組運行速度較快時,動車組采用電制動方式,當動車組運行速度較低時,由于電機轉速較慢不足以提供所需制動力,此時動車組采用電制動與空氣制動相結合的方式,考慮到空氣制動多出現在動車組速度較低時且延時大計算繁瑣,本文制動階段只考慮電制動。當動車收到制動信號,因系統存在傳輸延時環節,動車組在延時后開始制動;動車組減速度逐步變化至目標減速度。
牽引-制動控制系統流程圖如圖1所示。
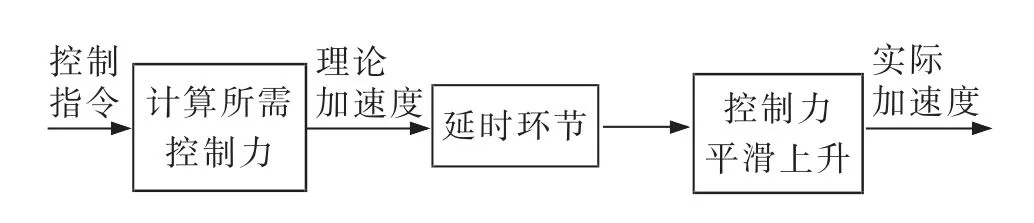
圖1 控制系統工作流程圖Fig.1 Flow chart of control system
1.2 動力學模型
當控制單元接收ATO或司機發出的控制指令時,由于網絡和物理傳輸延時的存在,經過短暫周期后作用于動車上,此過程可用一階動態系統近似描述[14]

式中:a(t)為控制加速度,通過控制器作用產生的加速度;a(t)為目標加速度;τ為系統響應時間常數;T為延時時間常數;上述公式反映了牽引/制動力產生的動態過程。復頻域可表示為

動車組的實際加速度a1(t)由控制加速度以及非線性空氣阻力引起的加速度d構成

建立以目標加速度為輸入,實際速度為輸出的動車組模型,如圖2所示。

圖2 動車組控制模型Fig.2 EMU control model
圖2傳遞函數如下所示

采用帕德方法近似延時環節,并利用雙線性變換將上述傳遞函數離散化可得

考慮到CRH380A動車組編組形式為6動2拖,且牽引系統包括T1+M1+M2,M3+M4,M5+M6+T2組成3個獨立的牽引動力單元,因此我們將高速列車分為3個動力單元,且每個動力單元均可實現牽引-制動環節;第1個動力單元為T1+M1+M2;第2個動力單元為M3+M4;第3個動力單元為M5+M6+T2如圖3所示。

圖3 CRH380A型動車組動力單元分布圖Fig.3 Power unit distribution of CRH380A EMU
由式(5)可得動車組的多動力單元線性模型為

式中:A(z-1)=I+A1z-1+A2z-2+A3z-3;B(z-1)=B0+B1z-1+B2z-2;V(k)=[v1(k),v2(k),v3(k)];U(k)=[u1(k),u2(k),u3(k)];分別為每個動力單元的輸出速度以及輸入目標加速度;A(z-1)和B(z-1)均為關于z-1的3×3對角多項式矩陣。
考慮到上述線性模型未考慮非線性空氣阻力的影響,隨著速度的增加,空氣阻力的非線性越來越強,在此我們將線性模型與實際列車模型的誤差定義為未建模動態項,結合式(6),動車組的運行模型可描述為線性模型(6)與未建模動態項組成的集成模型

其中,ξ(k)=[ξ1(k),ξ2(k),ξ3(k)]為每個動力單元的未建模動態項。
2 參數估計
考慮到模型參數的緩慢變化,利用BP神經網絡實時估計系統未建模動態項,利用遞推算法實時估計系統模型參數,從而改善高速列車自動駕駛的控制精度。
2.1 BP機神經網絡
BP神經網絡具有很強的非線性映射能力,因此可以用來估計系統中的非線性未建模動態項,其數學模型為

其估計值為ξ(k),且與系統過去時間的輸入輸出相關;z(k)=[vi(k-1),…,vi(k-3),ui(k-1),…,ui(k-3)]為神經網絡的輸入;W,V為表示神經網絡的權值矩陣;μ1,μ2為閾值;s(·)為sigmoid算子,通過反向傳播不斷修改閾值和權值,使得輸出最優。
2.2 模型參數更新策略
由式(7)可以得到動車組集成模型的參數辨識方程為

式中:xi(k-1)=[-vi(k-1),…,-vi(k-na),ui(k-1),…,ui(k-3)];θi=[ai1,…,ai3,bi0,…,bi2]。
利用BP神經網絡實時估計系統未建模動態項,得到估計模型為

其中θ˙i(k)為第i個動力單元k時刻參數θi(k)的估計值,其辨識算法如下所示[15]

式中:Δ為已知的誤差最大值;e(k)=w(k)-v˙i(k);w(k)為已知速度曲線。
3 多變量非線性廣義預測控制方法
基于上文線性模型與非線性未建模動態組成的集成模型提出多變量非線性廣義預測控制方法如圖4所示,控制器由反饋控制器以及未建模動態補償器兩部分組成,反饋控制器用來控制模型輸入跟蹤參考速度曲線;非線性未建模動態補償器用來消除非線性項對于閉環系統的影響。

圖4 多變量非線性廣義預測控制器Fig.4 Multivariable nonlinear generalized predictive controller
3.1 控制器設計
引入如下預測控制性能指標[16]
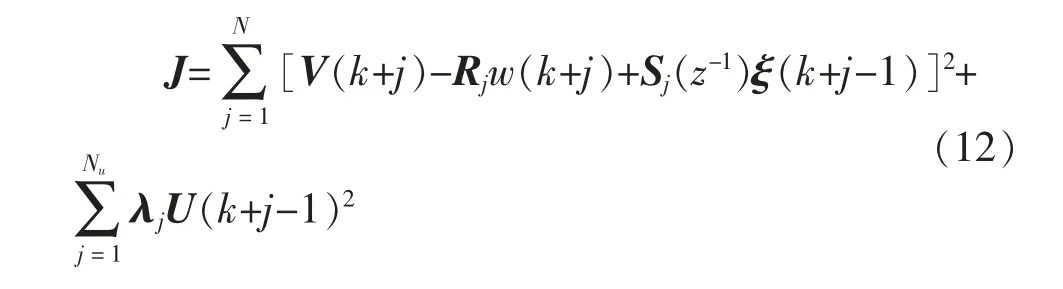
式中:Rj和λj為對角加權矩陣;Sj為關于z-1的對角加權多項式矩陣;N和Nu分別為預測時域長度和控制時域長度。為獲得j步超前預測,引入Diophantine方程

式中:Ej(z-1),Fj(z-1),Gj(z-1),Hj(z-1)均是關于z-1的對角多項式矩陣,由式(7),式(13),式(14)可得J步輸出預報

將式(15)帶入上式性能指標中,并且選擇適當的加權多項式矩陣Lj(z-1)使得[Ej(z-1)+Sj(z-1)]ξ(k+j-1)=Lj(z-1)ξ(k-1),這 里Lj(z-1)=Lj,0+Lj,1z-1+…+Lj,n1z-n1)是關于z-1的對角多項式矩陣,將式(15)帶入式(12)中可得

將式(16)化為矩陣形式

令矩陣(G QG+λ)-1G Q的前3行為:P=[P1,…,PN],則多變量預測控制律方程為

3.2 控制器參數選擇
將式(19)代入式(7)中可得

由上述公式可知[Hc(z-1)-z-1B(z-1)Lc(z-1)]ξ(t-1)含有非線性未建模動態項,為了消除未建模動態項對系統的影響,選擇適當的加權矩陣Sj(z-1),(Sj(z-1)與Lj(z-1)相關)使得下式成立

選取多項式矩陣使得下式成立

消除系統的穩態跟蹤誤差。
綜上,多變量非線性預測控制算法的步驟如下:
步驟1測量動車組每個單元的速度輸出v(k);
步驟2利用極限學習機神經網絡估計未建模動態項;
步驟3利用辨識算法實時估計動車組各動力單元參數;
步驟4利用辨識后的參數求解Diophantine方程;
步驟5利用式(18),式(19)求解所需控制率;
步驟6選擇相應的加權多項式Lj(z-1),qj,λj;
步驟7將所得控制輸入帶入模型并得到新的輸出。
4 仿真試驗分析
為驗證文章中所提到的建模方法以及控制方法的有效性,本次仿真實驗我們采取了動車組在京滬鐵路上從濟南到徐州東區間的運行數據進行仿真試驗。考慮到牽引、制動工況下延時不一致,且每個動力單元的系統傳輸延時不同,在牽引工況下,動力單元1的系統響應時間τ1為0.4 s;傳輸延時T1為1 s;動力單元2的系統響應時間為τ2為0.4 s;傳輸延時T2為1.1 s;動力單元3的系統響應時間為τ3為0.4 s;傳輸延時T3為1.2 s;在制動工況下,系統的響應時間不變,動力單元1的傳輸延時T1為0.6 s;動力單元2的傳輸延時T2為0.7 s;動力單元3的傳輸延時T3為0.8 s。
為了驗證多變量非線性預測控制方法的有效性,我們模擬高速列車在正常運行情況下,參數突變情況下兩種情況下以驗證 本文方法可以實現高速列車的高精度跟蹤能力,并采用了PID算法與本文方法的仿真結果進行對比。
4.1 正常情況
采用本文控制方法并選取N=3,Nu=2以及PID方法在正常情況下對高速列車在濟南至徐州東區間內進行實時跟蹤。圖5,圖6分別是高速列車在正常情況下的仿真速度跟蹤曲線,誤差曲線。從圖5的局部放大圖中以及圖6誤差曲線圖中,我們可以看出本文方法實現了對于目標曲線的高精度跟蹤,跟蹤效果優于PID算法。在對目標速度跟蹤過程中沒有出現速度突變,均平穩過渡,達到控制效果滿足人體的舒適度要求[17]。
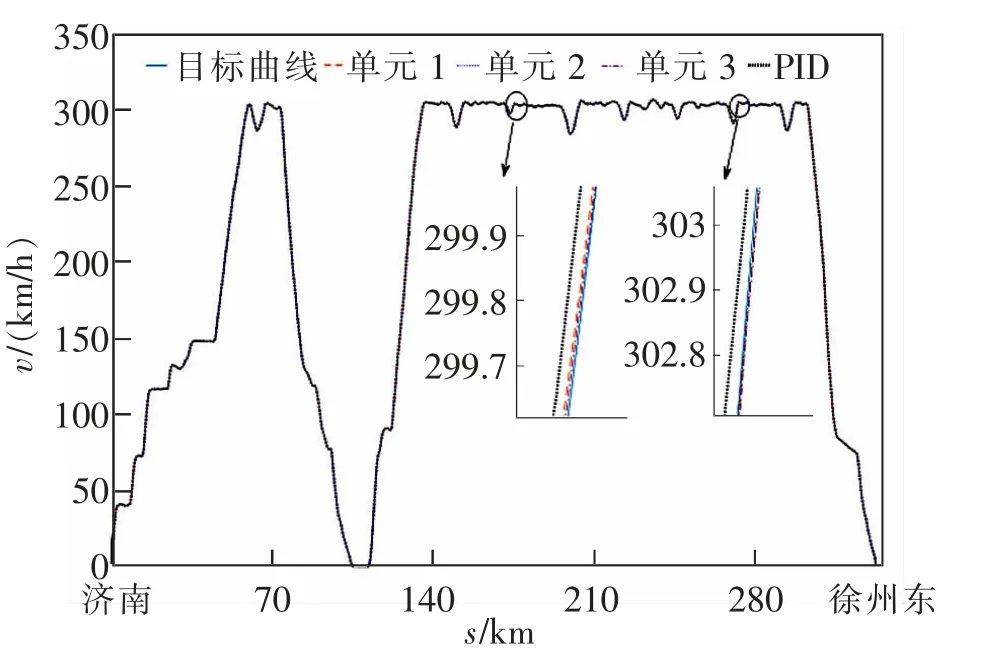
圖5 正常情況下速度跟蹤曲線Fig.5 Velocity tracking curve under normal conditions

圖6 正常情況下速度跟蹤誤差曲線Fig.6 Velocity tracking error curve under normal conditions
4.2 參數突變情況
當動車組機械磨損嚴重同時存在牽引/制動機構不穩定時,其運行模型的參數就會發生突變,廣義預測控制系統有自適應調節能力,以維持元控制性能不變,在面對這樣的問題時,我們通過以下仿真實驗驗證本文方法的有效性。

圖7 參數突變下的速度跟蹤曲線Fig.7 Velocity tracking curve under parameter mutation

圖8 參數突變下的速度誤差曲線Fig.8 Velocity error curve under parameter mutation
圖7,圖8分別為參數突變情況下的速度跟蹤曲線,誤差曲線。從圖7的局部放大圖以及圖8的誤差曲線圖中我們可以看出,本文方法依然顯示出比PID方法更好的跟蹤效果,在參數突變時刻有輕微躍變但后續依然可以保持平穩跟蹤,而PID方法有一個較大程度的跳變,且不能保持跟蹤效果(后續保持跟蹤是參數未突變時的跟蹤)。本文方法不會影響高速列車的安全操作以及乘坐舒適感,并在后續跟蹤過程中依舊保持了較好的控制性能,沒有出現速度的急劇增減,根據上述結果進一步驗證了方法的有效性。
5 結論
本文通過分析動車組牽引和制動系統的構成、特性、控制力產出的過程,提出了動車組的多動力單元模型,并利用廣義預測控制器結合非線性補償器實現了對給定目標速度的精確跟蹤,在正常實驗情況下以及參數突變情況下通過與PID算法進行比較驗證了系統的魯棒性、跟蹤性能以及控制效果。仿真結果表明,本文所提方法是可行的滿足了較高的要求,實現了高速動車組安全、準時、舒適高效的運行。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19