Landsat 8全色與多光譜數據融合算法對比研究
2021-06-21 05:51:34馬梓臻王笑峰
陜西水利 2021年5期
馬梓臻,杜 崇,王笑峰
(黑龍江大學水利電力學院,黑龍江 哈爾濱150080)
0 引言
遙感技術在幾十年的發展中已經被頻繁的應用在農林業、海洋、氣象、環境監測等許多領域。當下遙感衛星的發展趨勢越來越好,遙感數據也愈加豐富,但對于遙感信息的利用率卻不是很高,所以對遙感影像進行圖像融合有利于提高目標地物的提取精度[1]。遙感數據也發展為高分辨率、高光譜、高時相[2]。隨著這些遙感數據的增加,如何綜合性的利用這些數據的優勢來解決遙感影像自動解譯過程中存在單一數據源不足的問題,因此,對遙感影像進行融合的技術逐漸成為了其中的熱點問題之一[3]。并且融合多光譜影像和全色影像也已經成為了其中比較重要且常用的方法之一,因為多光譜影像具有高光譜分辨率,全色影像具有高空間分辨率。近年來Landsat系列衛星已經發展到Landsat8OLI衛星,其波段的劃分更為精確細致,數據的量化范圍也逐漸變大[4]。使用遙感影像融合技術可以將高光譜分辨率和高空間分辨率的影像融合來提升影像質量。當下,PCA主成分變換法、Brovey融合算法、Gram-schmidt光譜銳化法、NDD最鄰近擴散算法、HPF高通濾波法、Pansharp融合法、SFIM融合法和小波變換法等都是頻繁被人們使用到的方法,但不可置否,不論哪種算法都有自身的優缺點存在。對于不同數據源或參數設置不同時使用同一種融合算法,得到的融合效果也會存在較顯著的差別。本文使用Gram-Schmidt光譜銳化法、Brovey變換法、PCA主成分分析法和NDD最鄰近擴散算法四種方法,通過對Landsat8OLI影像的多光譜影像和全色影像進行融合,并將得到的融合結果從定性和定量兩方面進行評價分析。
1 數據來源與預處理
Landsat8衛星由美國航空航天局(NASA)于2013年2月11日發射,衛星上攜帶了2個傳感器,分別為陸地成像儀Operational Land Imager,(簡稱OLI)和熱紅外傳感器Thermal Infrared Sensor,(簡稱TIRS)。OLI成像儀包括9個波段(B1~B9),其中包括一個空間分辨率為15 m的全色波段(B8),Band8由于其范圍較窄可以更好區分植被和非植被。其余的均為空間分辨率為30 m的波段。TIRS成像儀攜帶的B10和B11兩個熱紅外波段,其空間分辨率都為100 m,主要用于地球熱區地帶熱量流失的收集。
本文采用2018年12月19日的Landsat8OLI影像主要位于哈爾濱市,且該影像的云覆蓋量小于等于10%。對遙感影像使用ENVI5.3軟件進行預處理和影像融合工作,其中預處理工作包括裁剪、輻射定標、大氣校正和正射校正等。本文選取的Landsat8影像已提前做過正射校正,故不再對其進行正射校正預處理。
2 融合算法
2.1 G-S法
Gram-Schmidt Spectral Sharpening光譜銳化方法(簡稱G-S算法),首先進行G-S變換,變換要求將模擬后的全色影像作為變換的第一分量,然后再通過模擬高分辨率和低分辨率的波段影像進行G-S變換,然后通過統計值的不斷調整來匹配變換后的第一分量,繼而將生成的新的數據集進行G-S反變換來得到增強的空間分辨率的多光譜影像。該法不限制波段數量,可以較好地表達空間紋理和光譜特征,也可消除多余信息[4]。
2.2 Brovey法
Brovey融合算法采用的是RGB三個波段,將三個波段分別與全色波段對應像元的灰度值相乘,并將其與RGB圖像波段總和進行相比,得到兩者比值的結果,最后通過重采樣方法得到高分辨率的多光譜圖像。但是由于融合后的結果是遵循各波段的光譜信息按比例分配的原則,所以融合的影像會出現一定的色彩失真現象。該方法不適用3個波段地物特征的差異表現不明確的影像,因為這樣使用Brovey法得到的融合影像效果將不顯著。
2.3 PCA法
Principal component analysis主成分分析法(簡稱PCA),其融合原理為:先獲得主成分分量,主成分分量是由PCA正變換得到的,接著用直方圖均衡化后的全色影像替換第一主成分波段并且通過主成分逆變換得到融合后的影像[5]。多光譜和全色影像的光譜重合度決定了融合質量的好壞,否則將會出現光譜失真的現象。主成分變換的目的是去除多余信息,并使得主分成中含有的信息內容互不重疊,總數據量得以減少,圖像信息也有所增強。
2.4 NND法
最鄰近擴散算法Nearest-Neighbor Diffusion(簡稱NND)是以像素光譜為最小單位。融合原理為先使用重采樣方法將全色影像處理到多光譜影像的空間分辨率。然后,對同一位置各個波段的像素應用線性回歸算法獲得光譜波段對于像素值的權重,并用全色高分辨率遙感影像計算鄰近像素值的差異因子,最后,通過上一步獲得光譜權重對光譜進行處理,獲取近似于原始多光譜影像的光譜信息。其中,有兩個重要參數在實驗中選用默認參數,分別為強度平滑因子和空間平滑因子[5]。該方法具有效率高,速度快等特點,并且融合后的效果較好,可以很好的保持影像的空間特征和光譜信息。
3 影像融合效果評價指標
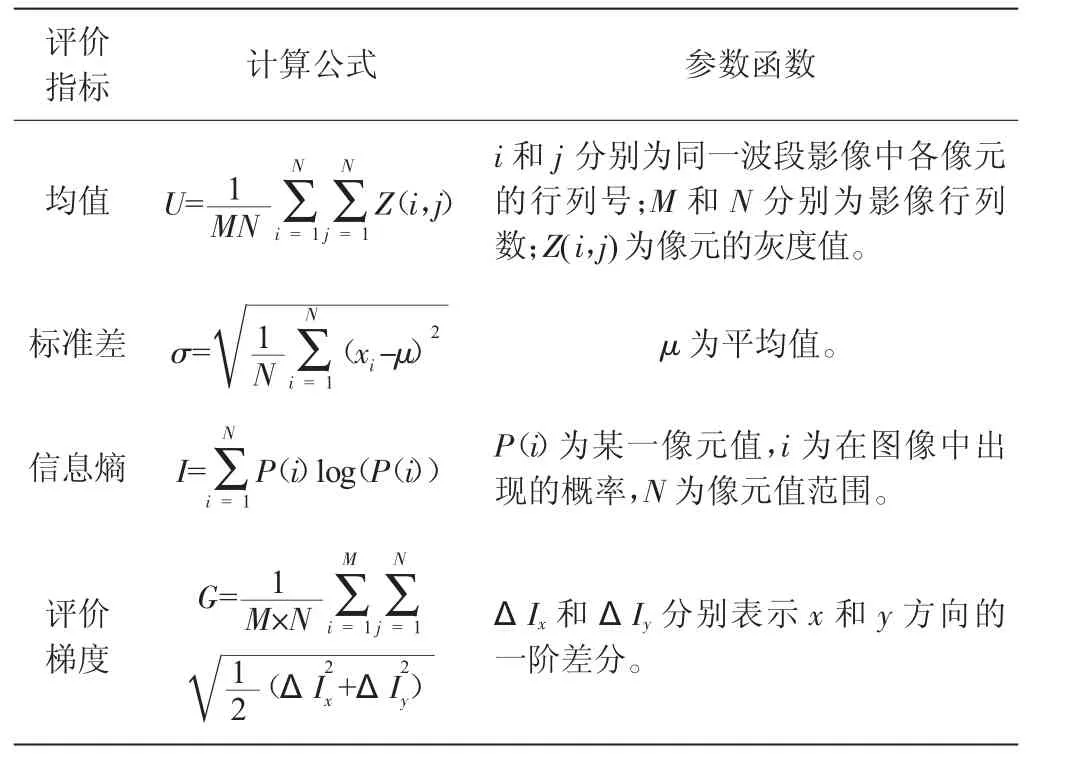
表1 評價指標
4 影像融合效果評價
對影像融合結果的評價通常采用兩種方法即定性評價和定量評價。定性評價是通過評價人目視解譯來對融合結果進行一定的分析,但是容易受到評價人主觀上的影響。但其具有更快、更直觀的優勢,而且對融合后的結果進行初步判斷也可以起到一定的參考作用[3]。但是結合評價指標對影像融合質量進行定量評價,會使結果更加準確且更具有說服力。而且通過指標分析的定量方法要比目視的定性方法更加準確和嚴謹,在對影像融合后的分辨率和亮度等各項指標的區分也可以更加清楚和明確。
4.1 定性評價
以下為融合結果圖(圖1~圖5),從光譜特征方面來看,G-S、PCA和NND融合算法的影像光譜色調基本接近原始影像,較好地保留了光譜信息。其中NND融合影像的清晰度更好,紋理更清晰,地物劃分更為明確。Brovey融合算法的圖像清晰度相比其他三種略差,細節反映也不如其他三種。總體來看,NND算法目視效果最好。
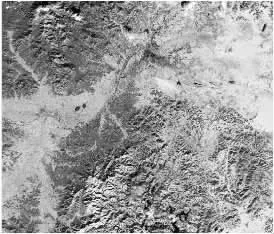
圖1 原始影像
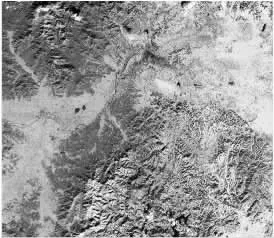
圖2 G-S法
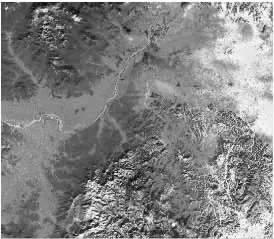
圖3 Brove y法
圖4 PCA法
圖5 NND法
4.2 定量評價
用評價指標對融合效果進行定量評價要比定性評價更為準確和嚴謹,可以更直觀地通過數據清楚地了解圖像的亮度,反差的大小,和所含信息量的多少,以及達到的融合效果如何和對一些微小細節的反差的表達水平如何也即圖像的模糊程度。選取均值、標準差、信息熵以及平均梯度4個評價單一圖像特征的指標來對融合影像進行定量評價,見表2。
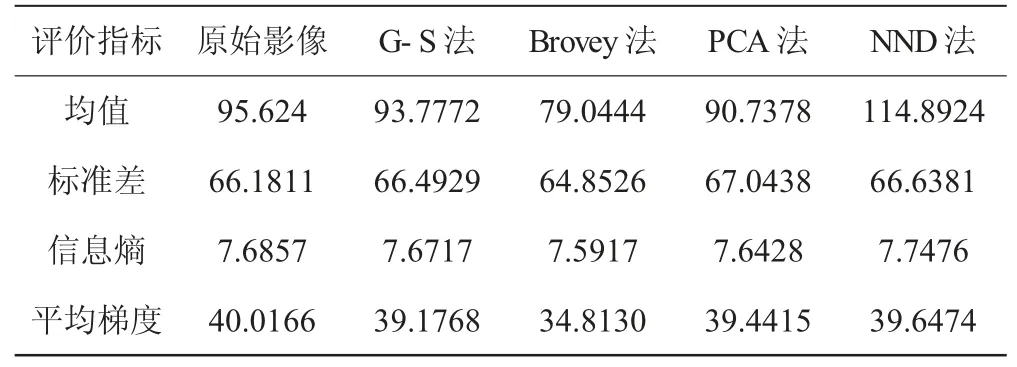
表2 評價指標統計情況
在均值方面,NND融合算法的均值為114.8924,為4種結果中最高,G-S和PCA融合算法均值次之,表明NND融合效果的平均亮度較高,Brovey融合算法的均值最低為79.0444,表明其亮度較差。
在標準差方面,PCA融合算法的值最高為67.0438,其次為G-S法和NND法,這三種融合算法的標準差較為接近,表明這三種融合結果的灰度級分散度差不多,圖像反差較大,讀出的信息也較多。而Brovey融合算法的值最小,說明其融合后的圖像灰度級的分散沒有其他三種方法好,反差也較另三種方法略差。
在信息熵方面,是從融合效果來說,四種方法的信息熵都很接近,說明融合效果都較接近,NND法的融合效果較另三種略好一點,其包含的信息量也略多,可以更好地區分地物信息。
在評價梯度方面,從模糊程度來說,G-S融合算法、PCA算法和NND融合算法的平均梯度值都較為接近,分別為39.1768、39.4415和39.6474,表明融合后的圖像清晰度都較好,Brovey融合算法的值最小為34.8130,圖像清晰度相對較差,細節反映略差。總體來說,NND融合算法的融合效果整體上要比其他三種方法好。
5 結語
對Landsaat8OLI影像使用4種不同的融合算法進行融合,通過對比分析,可以得到G-S、Brovey、PCA和NND四種融合算法在空間分辨率上都有所提高,其中,G-S和PCA融合算法融合后的圖像較接近原圖,清晰度也較好,地物分類較清晰。而Brovey融合后的圖像效果與原圖有較大差別,灰度級分散度并不好,反差較差,清晰度也是最不好的,細節反映較另三種結果不好,地物分類效果較差,這也是因為Brovey融合算法是將各波段的光譜信息按比例分配,這也就導致了融合后的圖像色彩變化較大,清晰度不夠,并且存在色彩失真。反之不論是通過目視還是指標定量分析都可以發現NND法的對地物分類的效果更好,能更容易辨別不同的地物。最后,通過定性評價和定量評價得到的結果都表明NND融合算法得到的融合結果的灰度級分散度較好,圖像反差較大,讀出的信息也較多。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年12期)2021-11-30 02:58:01
石油瀝青(2021年4期)2021-10-14 08:50:44
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
