基于氣敏傳感器的高穩態物理不可克隆函數發生器
2021-06-24 09:27:48汪鵬君李樂薇鄭雁公
電子與信息學報 2021年6期
汪鵬君 李樂薇 鄭雁公 李 剛
①(溫州大學電氣與電子工程學院 溫州 325035)
②(寧波大學信息科學與工程學院 寧波 315211)
1 引言
物聯網(Internet of Things, IoT)通過網絡技術和各類信息傳感器,按照協定方式將能夠被獨立標識的機器、人和物等按需求連接起來,進行信息傳輸和協同交互,實現“萬物互聯”[1]。傳感器作為物聯網系統的神經末梢,獲取所需外界數據信息,是將數字世界和物理世界連接的核心。隨著物聯網應用范圍的拓展,傳感器級的安全問題越來越受到重視。一方面,傳感器節點通常部署在無人值守的地理環境,只有很少或沒有安全保護[2],存在信息泄露的安全隱患。另一方面,傳感器附件配備可用內存較少,計算能力有限[3],一個典型的傳感器附件可能只備用512 B的內存,諸如高級加密標準(Advanced Encryption Standard, AES)之類的傳統加密技術無法使用。如何以較小的計算和存儲開銷,實現傳感器產生數據的安全、可信傳遞,已經成為物聯網安全的迫切需求。
物理不可克隆函數(Physical Unclonable Function, PUF)發生器可利用物理結構的隨機、固有屬性為物聯網安全提供低開銷、高可靠性的解決方案。Pappu等人[4]依據光學操作原理實現物理單向函數以產生能夠滿足唯一標識功能的激勵響應對(Challenge Response Pairs, CRP),最早提出P U F 的概念。隨之發展到目前以硅基為主的PUF發生器,它利用硅基電路制造過程存在的微小工藝偏差產生具有唯一性、隨機性和不可克隆性的硬件指紋,包括仲裁器P U F[5]、環形振蕩器PUF[6]、靜態隨機存取存儲器PUF(Static Random Access Memory PUF, SRAM PUF)[7,8]和觸發器PUF[9]等。然而將這些硅基PUF直接集成到資源受限的傳感器節點將會增加設計難度和額外成本[10]。學者已著手探索利用已有的傳感器組件實現更低成本PUF發生器的研究[11]。Rosenfeld等人[12]利用傳感器半透明底層所涂深色物質不均勻、光學透射率不一致,由此導致每個芯片光電二極管的光學靈敏度不盡相同等特點,提出一種消除傳感器與加密技術分離的架構,但是該架構仍需利用傳統的PUF將輸入激勵轉換為初始向量以進行下一步工作,增加了額外的電路開銷。Dey等人[13]證明加速度計具有獨特的指紋,對80個獨立的加速度計芯片以及25個Android手機和2個平板電腦內部加速度計的測試數據表明這些指紋的確存在。Aysu等人[14]利用陀螺儀的輸出構建不可預測的PUF響應,但存在無法重復生成所需激勵響應對的問題。Labrado等人[15]對壓電傳感器建模,分析得到交流電壓相同,由于制造過程的偏差,不同傳感器的等效阻抗存在差異,可利用此差異產生所需PUF數據,但該設計需要外加交流電壓源。
氣敏傳感技術的發展推動了物聯網在氣體(油)等管理領域的廣泛應用。通常將類型和數量眾多的氣敏傳感器集成于物聯網系統,安置在液化氣儲藏庫、暖通市場、交通運輸等場所。由于目前眾多氣敏傳感器之間沒有采取有效技術將其特征區分,不具備“一物一密”特性,所以當某觀察點發生異常時難以精準判斷哪個氣敏傳感器“報警”,也就是說難以找到氣體(油)的泄露源頭,耽誤最佳搶修時間;同時也存在傳輸數據被盜或篡改數據等惡意破壞事故。鑒此,本文針對物聯網智能體系中感知節點的安全性難題,擬利用氣敏傳感器識別到的外界環境變化,從中提取物理特征信息,設計高穩態PUF發生器,為傳感器提供定位標簽,實現物聯網系統自底向上的安全防護。
2 半導體氣敏傳感器偏差分析
氣敏傳感器能將檢測到的氣體成分和濃度大小轉換為電信號,但由于其制造過程的隨機工藝偏差使得輸出電信號值偏離理論值,因此可以利用氣敏傳感器制備工藝偏差構建氣敏傳感PUF發生器。氣敏傳感器檢測系統主要由3部分組成:氣體成分特異性識別和濃度識別的半導體氣敏材料、非電信號轉換為電信號的敏感組件和記錄信號的輔助儀器,結構如圖1所示。半導體氣敏材料為納米材料,具有高比表面積,氣體與材料的接觸面積大,為氣體分子吸附提供更多的活性位點,有助于氣敏性能的提高。
靜電噴霧沉積(Electrostatic Spray Deposition,ESD)是制備納米材料的常用方法[16]。泰勒錐的形成和射流鞭動是兩個隨機性很強的靜電噴霧關鍵環節。泰勒錐表面是液相和氣相的邊界,環境氣體的快速吸附和溶劑蒸發兩個過程并存,因此,不可避免地會引起泰勒錐內部擾亂,影響泰勒錐的形狀[17]。射流鞭動是靜電噴霧時聚合物噴射流的運動軌跡,呈復雜的3維非直線型“鞭動”。剛開始噴的絲是直的,隨后發生彎曲、不穩定。Shin等人[18]針對射流的不穩定階段提出鞭動模型,用線性不穩定性分析射流鞭動的發生。在已知流體性質和工藝參數條件下,給出式(1)擾動系數的數學方程

圖1 氣敏傳感器檢測系統結構示意圖

其中,Γ(E∞, Q)為不穩定放大因子,A(s)為振幅,s為向下移動距離,ω為增長速率,h為射流半徑,Q為流率,σ為射流表面電荷密度。
納米材料中纖維表面對氣體分子的吸附能力賦予每個傳感器獨有的氣敏特性。由于與噴霧效果相關的液體黏度、濕度、溫度等參數在實驗過程中不可避免地發生變化,導致射流振動不完全可控,致使納米纖維的直徑大小以及取向的排列發生差異。聚合物溶液通過電場到達收集板,從噴射口噴射出無數方向不定、粗細不一的纖維層層堆疊,導致每塊纖維區域密度都具有隨機性和唯一性。因此,每塊區域吸附氣體能力不同,可利用此特征得到隨機的、不可克隆的氣敏傳感PUF發生器。
3 氣敏傳感PUF發生器設計
3.1 半導體氣敏傳感器的制備
采用ESD技術制備納米材料,裝置如圖2所示,其具體制備過程如下:將Pd(NO3)2·2H2O (5 mg),SnCl4·5H2O (701 mg)和聚乙烯吡咯烷酮 (1200 mg)溶解于二甲基甲酰胺 (5 ml)和乙醇 (5 ml)混合溶液中,在室溫下攪拌6 h,使溶液均勻;將其灌入注射器,固定在推進泵上;將高壓電源的陽極連接注射器噴嘴,陰極連接接地的收集板,陰陽極距離保持15 cm;在16 kV高壓電場作用下,注射器噴頭開始噴射纖維材料;將纖維材料放入馬弗爐,在空氣氛圍中以1 ℃/min的加熱速率至600 ℃,并保持2 h,然后冷卻。
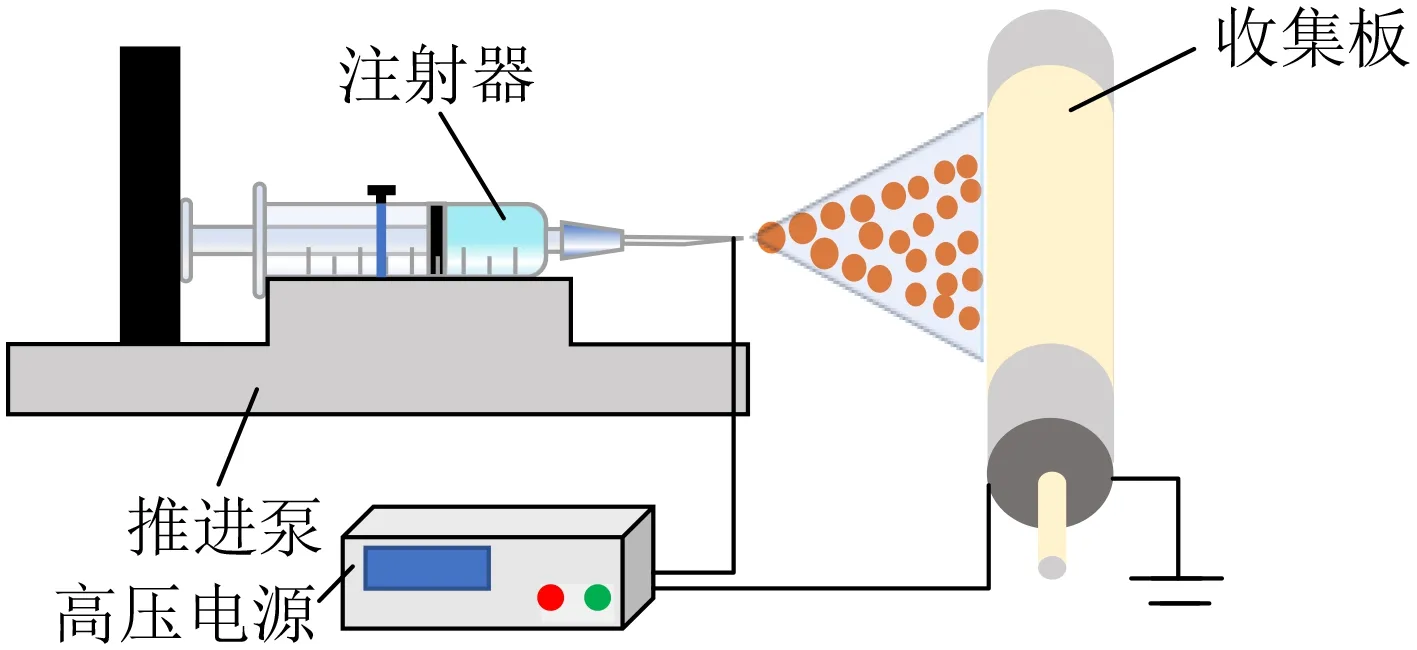
圖2 靜電噴霧裝置示意圖
傳感器一般分為內熱式和旁熱式兩種結構。旁熱式氣敏器件的氧化鋁陶瓷管內放置高阻加熱絲,陶瓷管外涂梳狀金電極,再在金電極外涂氣敏半導體材料。這種結構克服了內熱式器件熱容量小、易受環境氣流影響和測量不穩定的缺點,明顯提高器件穩定性。具體制作過程如下:將制備好的納米材料和去離子水按一定比例混合成糊狀物;將糊狀物涂到兩端固定鉑金線的氧化鋁管上,也同樣在空氣氛圍中以1 ℃/min加熱速率至600 ℃,保持2 h;待冷卻后取出。在氧化鋁陶瓷管軸心穿入一根直徑為0.05 mm,長度為10.5 mm細合金加熱絲,用于加熱;將加熱絲和用作測量電極的鉑金線焊在傳感器基座上,即完成旁熱式氣敏器件制備。傳感器如圖3所示。為使傳感器具有更好的穩定性和重復性,還需將其在300 ℃環境溫度下老化2~7 d。
3.2 傳感器響應提取
為完成傳感器響應提取,搭建如圖4所示氣敏傳感PUF發生器測試平臺,由測試腔、氣敏單元、蒸發臺、推進泵、流量計等組成。在測試過程中,開啟閥門1~4;將安裝有8個氣敏傳感器(作為1個陣列)的電路放入測試腔,并封閉;為氣敏單元電熱絲提供4.5 V直流電源。用數據采集儀(如自帶信號采集軟件的安捷倫34970 A)觀測時間-電阻曲線,待曲線平穩,即傳感器已經進入準穩態;用微量進樣器抽取一定量目標物的液體,通過推進泵將液體注射到蒸發臺。由于蒸發臺溫度達100 ℃,液體將快速氣化,并均勻擴散。同時,數據采集儀實時記錄8個氣敏傳感器電阻值變化。待傳感器電阻值穩定,推進泵停止推進,使空氣重新充滿測試腔。如此交替,可得到傳感器陣列對一定濃度目標氣體響應性能。
3.3 高穩態PUF發生器數據生成
由于氣敏傳感器制備工藝的隨機偏差,采集到的電阻值具有唯一性。將上述數據利用隨機阻值多位平衡算法[15]進行處理。其過程如下:將3個傳感器組合為1個傳感器簇,比較兩個傳感器簇總和電阻的大小,結果用1位二進制數表示。如果第1個簇的阻值和較大,則結果為1,反之為0。從8個傳感器中選出3個作為1簇,共有,即56種選擇;再從中任選兩簇進行阻值和比較運算,則產生,即128種可能性。簇選擇和比較運算將不同傳感器測量值隨機比較,進而得到128位PUF響應。該響應不會偏向任意某個傳感器,從而達到平衡。
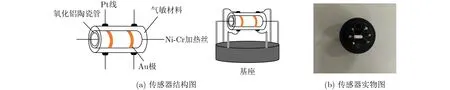
圖3 傳感器示意圖
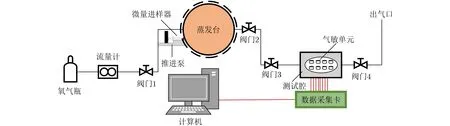
圖4 測試平臺示意圖
具體數據生成方法使用8位隨機阻值平衡算法,調用該算法16次生成128位響應,算法的偽代碼如表1所示。算法假定8位子集包含在數組bit中,數組v包含8個氣敏傳感器關聯的電阻值,傳感器0的值位于數組v位置0,傳感器1的值位于數組v位置1,依此類推。數組lef和r表示被選擇的兩簇傳感器位置,取出數組v中與位置對應的電阻值,作阻值和比較運算。之后,place的值增加1,也就是將被選擇的每個傳感器位置都加1,以確定在隨后的比較中使用哪幾個傳感器。進行8次比較后,一個過程完成,生成8個響應位。之后,改變lef與r的初始值以生成后續8位子集。
4 實驗結果分析
主要包括3部分:(1)材料表征;(2)偏差特性分析;(3)PUF發生器性能分析。用掃描電子顯微鏡(Scanning Electron Microscope, SEM)對材料形貌進行表征,觀察納米材料外觀結構和形貌;用X射線衍射分析儀(X-Ray Diffraction, XRD)測定并分析產物物相結構;搭建測試平臺提取傳感器偏差。采用唯一性、可靠性和隨機性3種常用性能指標評估輸出響應。
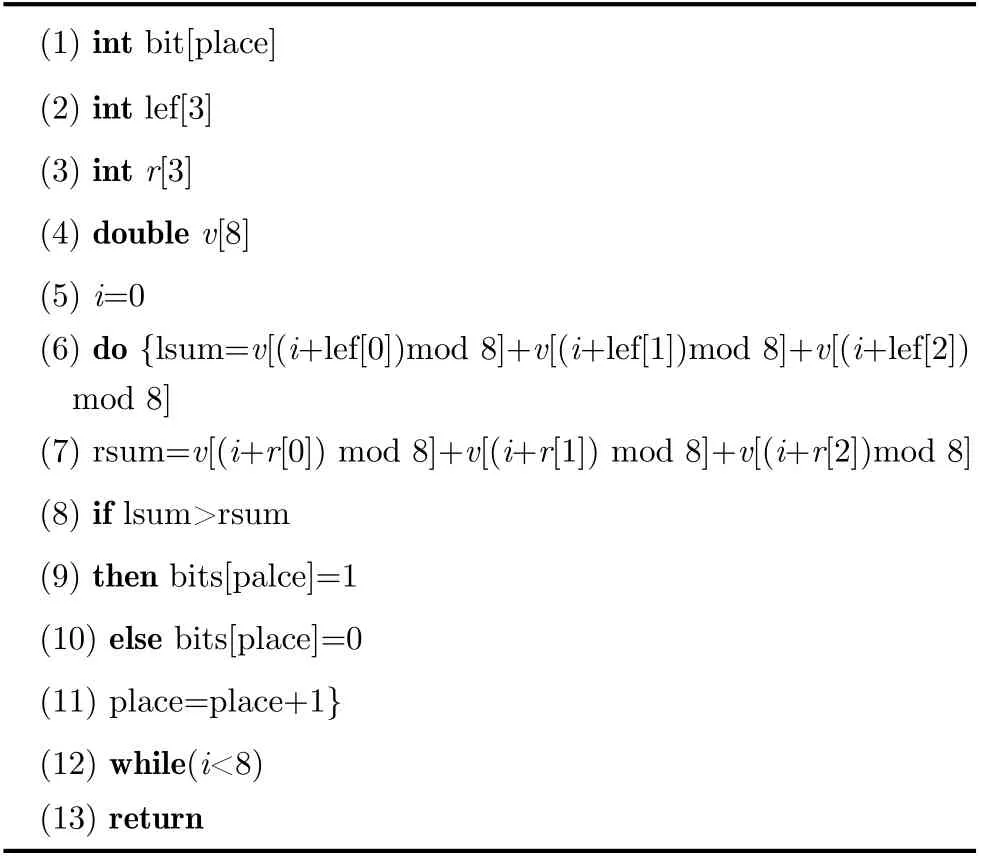
表1 8位隨機阻值平衡算法偽代碼
4.1 材料表征
SEM表征納米材料為顆粒狀氧化物形貌,如圖5所示。納米顆粒的大小沒有規律地散落分布,局部形成團聚,分布具有高度隨機性。在不同分辨率情況下都可以觀察到氧化物顆粒形態各異,每一個區域與氣體分子的接觸范圍都不相同,是傳感器PUF發生器差異性的原因所在。
圖6為Pd-SnO2納米材料樣品經600 ℃高溫燒結后的XRD圖譜。可以發現,(110), (101), (200),(211), (220), (310), (321)等的衍射峰,與SnO2的JCPDS(Joint Committee on Powder Diffraction Standards)標準卡片(PDF#77-0447)峰型吻合。Pd的摻雜并沒有改變SnO2的晶體結構,沒有出現PdO的特征峰,其原因在于制備的納米材料中PdO占比很小。
4.2 偏差特性分析
偏差特性表示不同傳感器對同一氣體激勵源的偏差情況。用安捷倫多路數據采集儀實時記錄原始電信號,反映傳感器電阻隨測試腔中甲醛氣體濃度變化而變化的信息。傳感器的響應定義為[19]

其中,Ra和Rg為氣敏傳感器在空氣和目標氣體的電阻值。利用式(2)計算傳感器響應隨時間變化的趨勢,如圖7所示。在200 ppm甲醛氣體濃度下,對所制備的Pd-SnO2氣敏傳感器進行兩次循環。可以發現,在響應曲線較為平穩階段,傳感器A和傳感器B表現出偏差特性,RA和RB變化趨勢一致,且RA>RB。有效降低阻值比較時響應翻轉現象出現的可能性,提高輸出響應的穩定性。
4.3 PUF發生器性能分析
4.3.1 隨機性
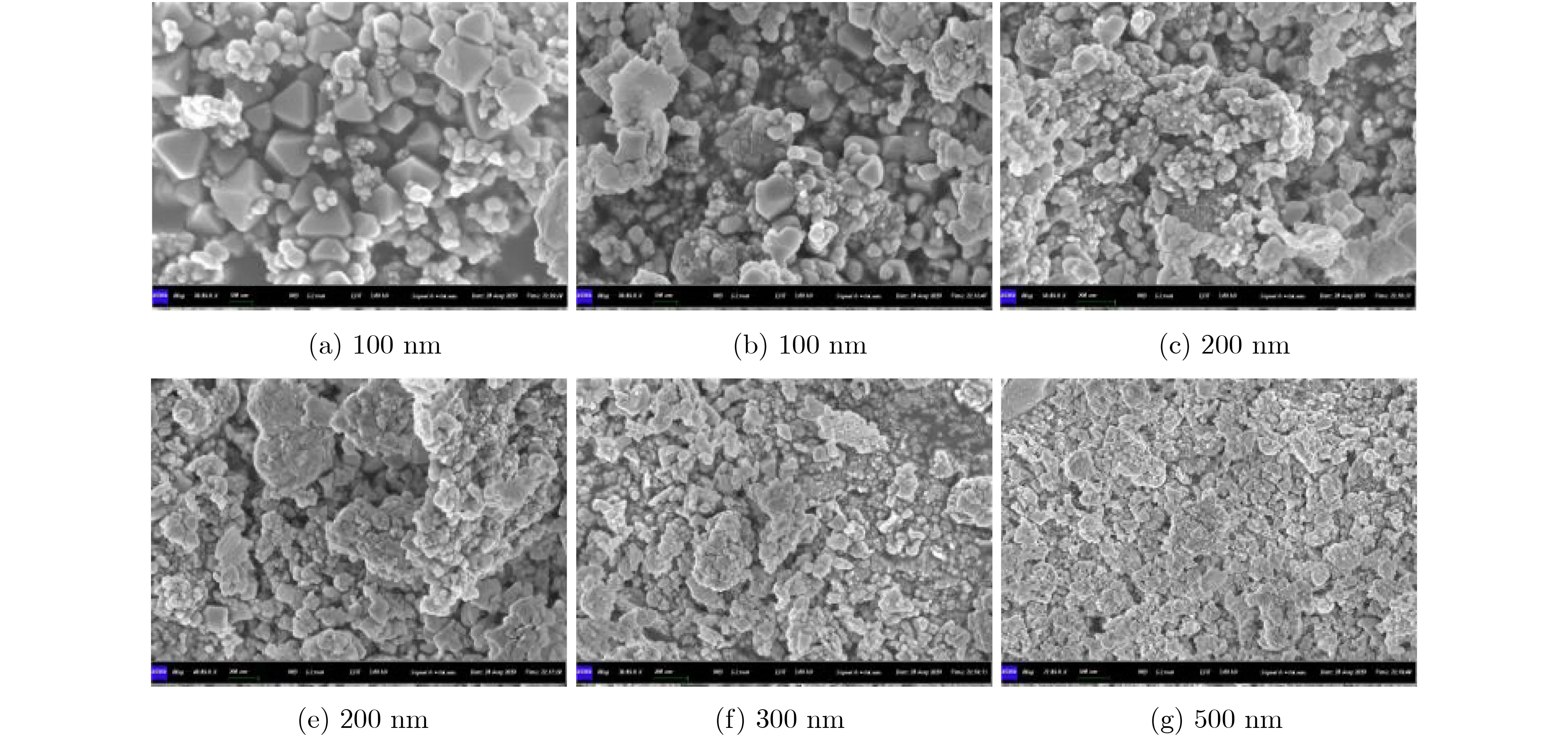
圖5 不同分辨率下的SEM表征

圖6 XRD表征
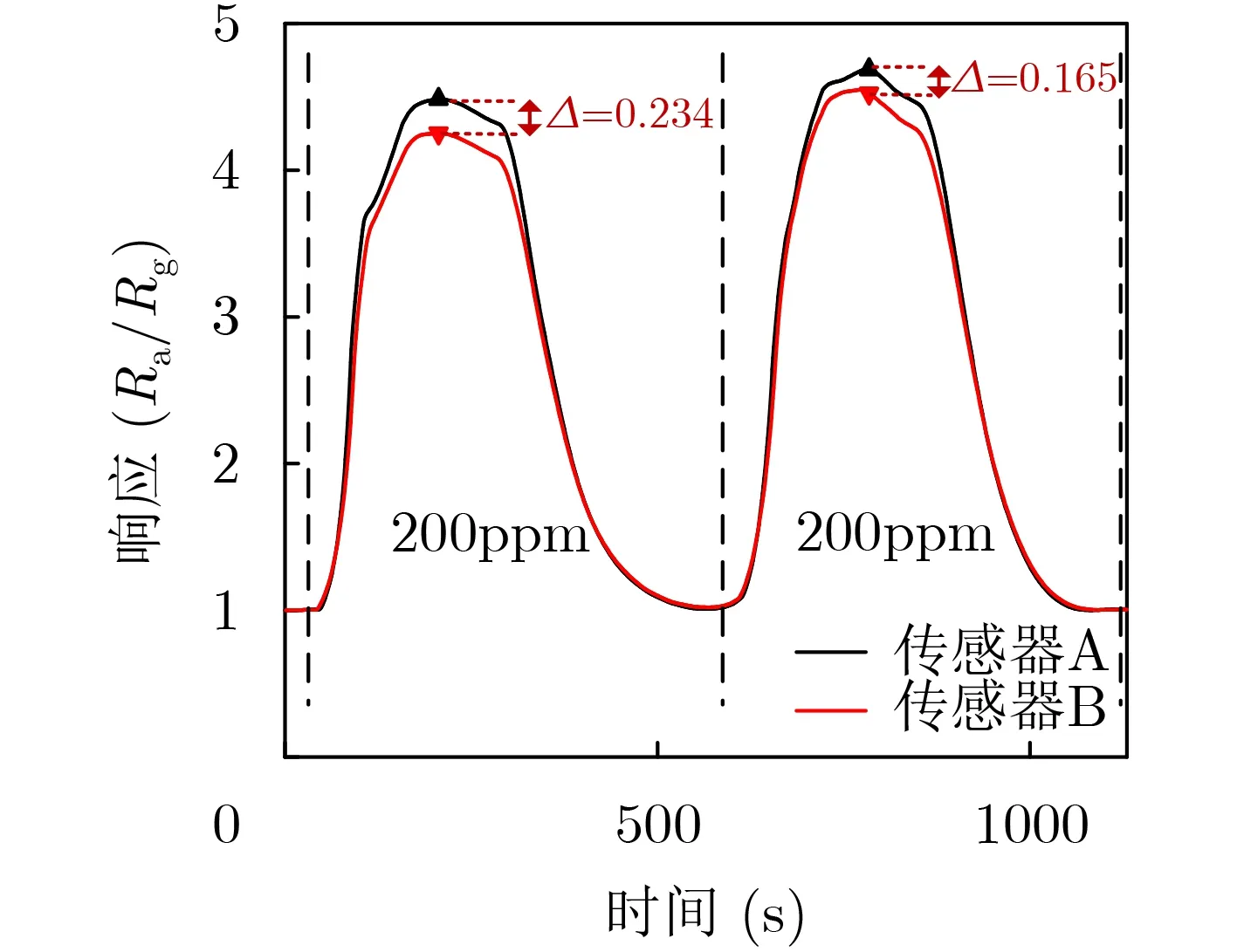
圖7 傳感器響應
隨機性表示PUF發生器輸出數據中邏輯0和邏輯1分布情況。在理想情況下,邏輯0和邏輯1的概率應相同,即隨機性為100%。按式(3)計算[20]

其中,r為輸出響應,P為輸出響應中1的概率。實驗制備了50組氣敏傳感PUF發生器樣本,測試了6400位二進制響應。其中,“0”的數量為3138位,“1”的數量為3262位,則得該PUF發生器的隨機性為98.06%,如圖8所示。
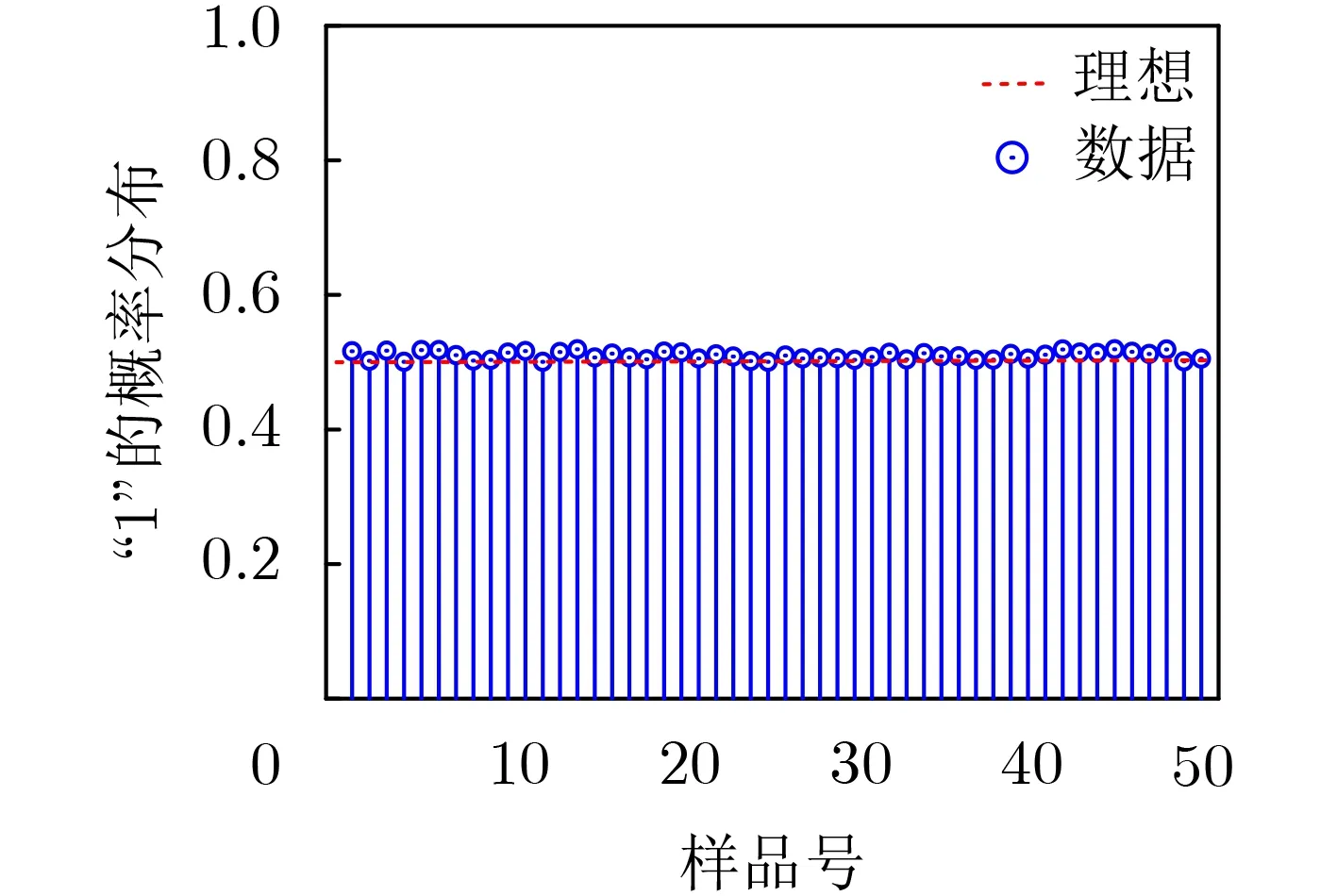
圖8 隨機性概率分布
4.3.2 唯一性
唯一性表示多個設備對同一激勵的響應區分度,通過片間漢明距離(Hamming Distance,HD)計算。在理想情況下,唯一性接近50%。按式(4)計算[20]
其中,k為PUF發生器的數量,Ri和Rj分別為第i和第j個PUF發生器的輸出響應,HD(Ri, Rj)為輸出響應的漢明距離,則得該PUF發生器的唯一性為49.04%,接近理想值50%,如圖9所示。
4.3.3 可靠性
可靠性表示PUF發生器在給定輸入激勵始終產生正確響應的可能性。理想情況下,可靠性為100%,這意味著PUF發生器將始終產生正確的響應。按式(5)計算n位響應的可靠性[20]

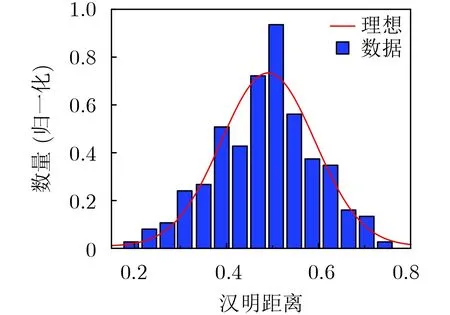
圖9 漢明距離分布
其中,m為同一激勵下測量的次數,n為響應數據的位數,Ru為選取的參考響應數據,Rv為第v次測量的響應數據。在4.2 ~4.9 V電壓范圍內,以0.1 V為增量,以4.6 V為參考點,選取5個PUF發生器樣本進行測試,統計結果如圖10所示。可以發現,隨著電壓偏離參考點,其可靠性出現下降的總體趨勢,具備PUF的典型特征。
可靠性還反映在一定時間內響應的變化情況。在常溫常壓下,選取5個PUF發生器樣本進行400 s連續測試。用每個PUF發生器的第1個響應作參考響應,統計結果如圖11所示。可以發現,前90 s的可靠性保持在100%,之后的310 s,也保持95%以上。
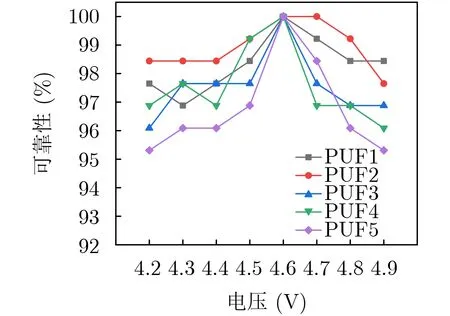
圖10 不同電壓下的可靠性

圖11 400 s內的可靠性
表2為與其他類型PUF發生器之間的性能比較。所設計的PUF發生器隨機性為98.06%,可靠性為97.85%,唯一性為49.04%。

表2 與相關文獻的比較結果(%)
5 結論
本文所提基于氣敏傳感器的高穩態物理不可克隆函數發生器設計方案將感知器件和PUF發生器有效結合起來,通過分析傳感器制造過程的隨機偏差,測試多組外部激勵下的傳感器響應,利用隨機阻值多位平衡算法生成高穩態PUF發生器數據,依靠傳感器組件而不需要設計專用PUF電路模塊,有效減少資源的開銷。實驗測試結果表明,基于氣敏傳感器的PUF發生器,在可靠性、隨機性和唯一性上均有較理想的特性,可為解決極端資源受限系統的高安全性問題提供解決途徑,為物聯網的發展提供安全保障。