基于動態預警的人車共駕智能汽車側向避障魯棒控制
2021-06-24 08:32:44聶枝根王萬瓊韓四海
重慶大學學報 2021年6期
聶枝根,王 超,王萬瓊,沈 澳,韓四海
(1.昆明理工大學 交通工程學院,昆明 650500;2.法國信息與系統國家重點實驗室,UMR CNRS 7020,法國 馬賽 13397;3.中國重汽集團杭州發動機有限公司, 杭州 311232)
智能駕駛汽車能夠提高汽車安全性,改善交通問題,并提升汽車舒適性和經濟性,成為目前交通和汽車領域的重要研究熱點[1-2]。但由于智能駕駛技術成熟性和智能駕駛背后法律問題,造成智能駕駛汽車將在很長時間內處于人車共駕的狀態[3]。基于此,為了提高汽車安全和駕駛員舒適性,先碰撞預警再根據駕駛員反應進行變道避障控制,為人車共駕智能汽車避障重要控制方式之一。
進入21世紀,汽車碰撞預警系統得到廣泛關注,國內外眾多企業和研究機構對其進行了大量的研究[4-5]。在美國AHS(automated highway system)項目的推動下,開始廣泛研究汽車避障預警和主動控制系統。由于安全距離模型能夠直觀反映兩車之間的位置關系,具有廣泛的適用性[6]。因此,很多碰撞預警研究的重點多集中設計縱向安全距離模型[7]。文獻[8]通過獲取汽車狀態參數,提出了一種以所需安全距離為安全指標的汽車追尾預警算法。文獻[9]通過對汽車超車時運動軌跡的分析,結合汽車的運動學模型,基于臨界縱向安全距離,構建了超車汽車碰撞的預警模型。文獻[10]構建了基于TTC(time to collision)碰撞時間理論的風險評估模型。但在真實行駛條件和環境下,路面狀態、駕駛狀態和駕駛干預將實時影響避障預警結果。并且,安全距離模型能實時計算兩車應保持的期望安全車距,但無法反映出汽車當前行車狀況的危險程度。
文獻[11]利用3D虛擬危險勢場規劃避障軌跡,并基于多約束模型預測方法,實現了避障參考軌跡跟蹤。文獻[12]基于模擬退火優化算法,規劃了能夠繞過障礙物的避障軌跡,并基于主動前輪轉向系統,設計了避障軌跡跟蹤控制器。文獻[13]采用人工勢場方法規劃了避障參考軌跡,并基于轉向系統跟蹤期望運動軌跡。但上述文獻未研究駕駛員是否介入以及駕駛員對側向避障起始時刻的影響,同時,控制策略也未考慮控制器參數攝動。
針對上述研究不足,筆者根據前方汽車速度動態變化,結合汽車的運動學模型,綜合考慮了路面、駕駛狀態和駕駛員干預,建立了縱向安全距離模型;并基于駕駛員反應時間和制動器反應時間等,提出了基于臨界縱向安全距離和碰撞時間倒數(TTC1)融合互補的多級預警算法,有效處理多因素影響下的避障預警,并反映汽車當前危險程度和決定側向避障觸發時刻。同時,為了能夠精準控制側向避障軌跡跟蹤,提出了考慮參數攝動的魯棒控制策略。最終,通過預警和控制相結合,實現了根據駕駛員動態干預,實時修正預警算法,并決定是否需要側向避障及側向避障觸發時刻,有效提高了人車共駕智能汽車安全性。
1 基于汽車制動過程分析的安全距離模型
制動過程經歷如下過程:駕駛員反應,駕駛員腳踩制動踏板到制動器開始起作用,制動器開始增壓到最大壓力,汽車持續制動到停車,汽車制動器解除;其對應時間分別為t1,t2,t3,t4,t5。從駕駛員反應到制動器開始起作用,即t1+t2時間內,汽車做勻速運動,制動距離為S1;t3時間內制動距離為S2;t4時間內制動距離為S3。具體推導過程見參考文獻[14]。
總制動距離為
Sbr=S1+S2+S3。
(1)
前車行駛的距離為SC,則安全預警距離表示為
Sw=Sbr-SC+d0,
(2)
式中d0為兩車最小保持車距。
安全距離預警模型的影響因素主要有自車初始車速、制動過程各階段歷經時間、最大制動減速度和前車行駛距離。其中,制動過程各階段時間除了與汽車制動系統性能有關外,還與駕駛員的駕駛狀態密切相關。
最小保持車距為自車行駛或停車時與目標車之間的臨界距離[15]。汽車避障過程中,將反映路面條件的附著系數和反映駕駛員特性的駕駛意圖參數引入到最小保持車距中[16],以提高縱向主動避障系統對不同路面和駕駛員的適應能力,具體見公式(3)。
(3)
式中:k為駕駛意圖參數;φμ為附著系數;a,b為模型參數。
由公式(3)可知,當駕駛員駕駛狀態相同且道路條件較好時,此時最小保持車距應較小以提高道路交通的利用率;當路面濕滑時,汽車易打滑,最小保持車距需較大以提升汽車行駛安全性。
實時計算智能汽車與前車的縱向距離,為實時避障預警提供了基礎,詳見圖1。圖中:t0為初始時刻,t為任意時刻,SC0為初始距離,LS為自車車長,LC為前車車長,SNx為自車縱向距離。
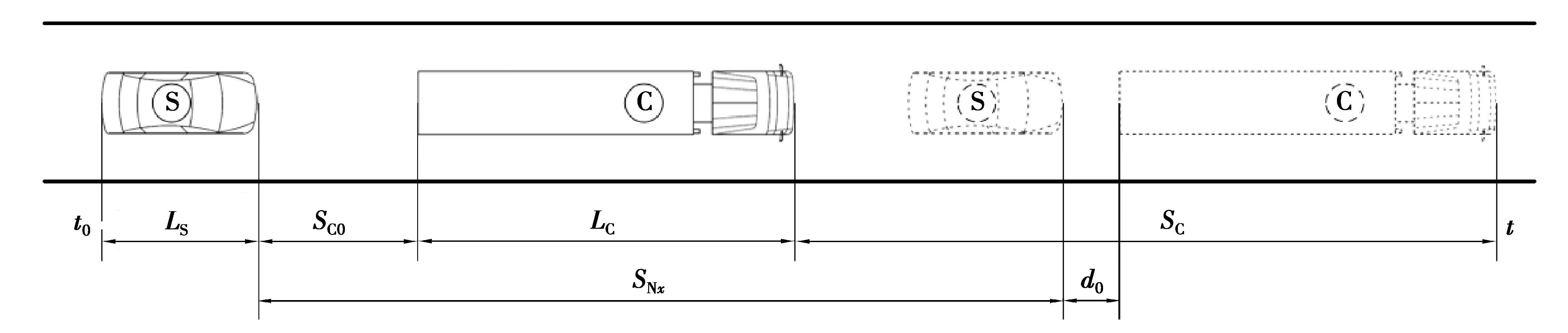
圖1 汽車縱向距離示意圖Fig. 1 Schematic diagram of vehicle longitudinal distance
假設前車(C車)沿當前車道直線行駛,C車和S車(自車)的縱向行駛位移如下。
(4)
(5)
S車與C車在任意t時刻之間的實時間距
(6)
式中:aC為前車加速度;aNx為自車加速度;vC為前車的實時車速;vNx為自車的實時車速;vC0為前車初始車速;vNx0為自車初始車速。
要使S車與C車在任意時刻都能安全避障,避障過程應實時滿足式(7)。
SNC>d0,t∈(0,t)。
(7)
2 動態預警算法
2.1 汽車側向避障軌跡模型
為了使變道完成時,車輛側向加速度為零,采用正弦函數作為車道軌跡模型[17]。如圖2所示,圖中P點為智能汽車變道過程中最易與前方汽車碰撞點。

圖2 智能汽車避障側向變道軌跡俯視圖Fig. 2 Vertical view for lateral lane change of collision avoidance
汽車側向運動模型為
(8)
式中H為車道寬度。
為了使汽車側向安全距離模型能夠適應于不同路面條件和駕駛員的駕駛狀態,將縱向安全距離模型中的最小保持距離代入式(8),可得S車側向行駛軌跡為
(9)
期望橫擺角速度為
(10)
2.2 汽車側向避障預警算法
當汽車行駛到無法通過縱向制動避障時,此刻主動換道避障危險報警距離為
Sa=S2+S3-SC+d0。
(11)
為確保預警系統不影響駕駛員駕駛狀態,預警系統不能夠設置過多預警狀態。當SNC>SW時,此時處于安全行駛狀態,預警設備不報警;當SNC≤SW時,進行持續不間斷黃燈預警,提醒駕駛員控制汽車進行制動或轉向操作,此時系統實際上未進行主動控制;當SNC≤Sa時,持續不間斷紅燈預警,此時無法通過制動安全避障,必須轉向避障控制。
為實現轉向避障控制,根據前后汽車實時車速,參考側向行駛軌跡,建立了臨界側向避障安全距離模型,具體如下所示。
(12)
SNy=W,
(13)
式中:T為自車側向位移等于前車寬度所用的時間;W為前車最大寬度。
汽車臨界側向避障極限的縱向安全距離為
Ss=vNxT+d0-vCT。
(14)
在此縱向安全距離之前,駕駛員可以自主控制汽車進行側向避障;當SNC≤Ss時,駕駛員依然未干預,主動避障系統將自動接管汽車進行側向變道避障控制。
汽車主動避障控制系統應能夠根據當前汽車運動狀態,判斷安全狀況并及時預警提醒駕駛員控制汽車。但安全距離模型只能夠實時計算兩車應保持的期望安全距離,無法反映出汽車當前危險程度[18]。基于上述原因,引入汽車碰撞時距TTC的倒數設計融合互補的多層預警算法。
汽車碰撞時距定義[19]為
(15)
式(15)也可表示為
(16)
由TTC1的定義可知,當TTC1>0時,自車大于目標車速,即自車正在接近目標車;當TTC1<0時,自車小于目標車速,說明自車正在遠離目標車,此時為安全狀態;當TTC1=0時,自車等于目標車速,說明兩車處于相對靜止狀態,故為安全狀態。
考慮到評價系統的實用性和通用性,融合互補的多級預警算法分為4個等級:安全、警告、危險及臨界狀態。并且,為了保證汽車實時安全,所提預警算法的預警等級由安全距離和碰撞時距早觸發者決定。具體預警分級如表1所示。
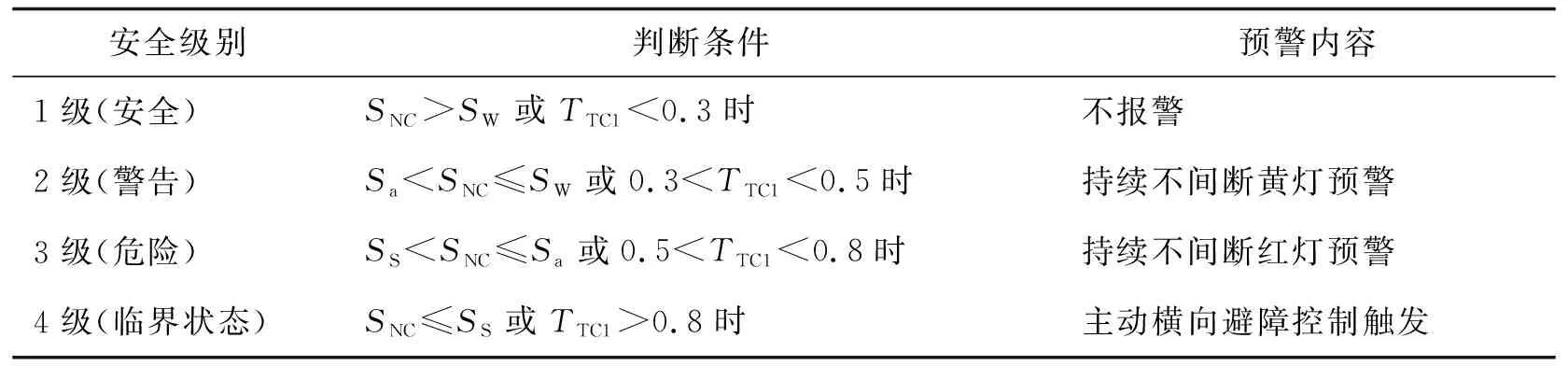
表1 融合互補的多級預警算法
根據預警各級定義,設計了避障預警及避障方式切換流程圖,見圖3。在動態環境不同前車和智能汽車狀態下,兩種方式預警時間節點不同,實際預警狀態由兩個預警方式中早觸發的方式決定,形成了兩種預警方式融合互補的多層預警算法,以確保駕駛員和控制器更多處理時間,進而保證汽車避障安全性。此多層預警算法既能夠判斷當前行駛與前車應保持的距離,也能夠反映任一時刻的危險情況。
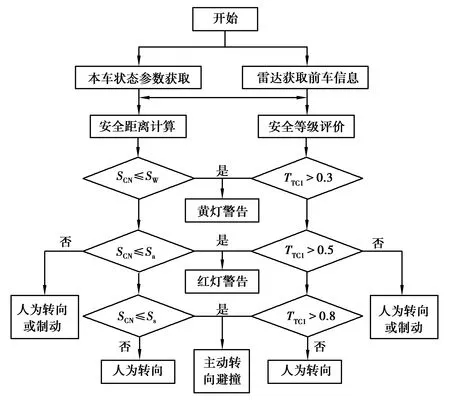
圖3 避障預警及避障方式切換流程圖Fig. 3 Flow chart of collision avoidance warning and mode switching strategy
由圖3可知,當預警等級為2級時,發出黃燈警告,提醒駕駛員及時進行轉向或制動干預;若駕駛員沒有反應,到達3級危險狀態時,發出持續不間斷紅燈警告,并只能通過轉向避障;如果駕駛員未干預,到達4級臨界狀態時,避障系統將主動接管汽車進行主動換道,保證汽車避障安全。
3 汽車側向避障控制
如果從普通預警至4級(臨界狀態)預警,駕駛員一直未進行干預,此時控制系統將主動接管人車共駕智能汽車進行側向避障。人車共駕智能汽車在側向避障過程中,汽車狀態變化將引起汽車垂直載荷動態變化,進而引起汽車前后側偏剛度動態變化,影響控制策略精準控制。同時,人車共駕智能汽車在避障過程中可能存在外部干擾。因此,為了實現避障軌跡精準跟蹤,設計了考慮參數動態攝動的側向避障魯棒控制策略。
3.1 汽車側向動力學模型
為實現側向避障軌跡跟蹤,建立二自由度簡化模型[20-21],如圖4所示。其二自由度分別為側向運動和橫擺運動。側向運動由質心側偏角表征,橫擺運動由橫擺角速度表征。
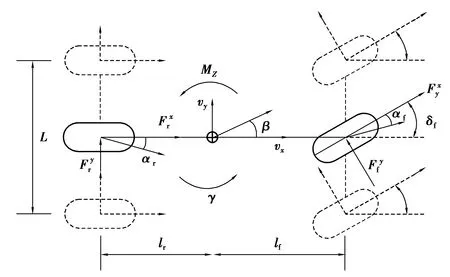
圖4 簡化模型Fig. 4 Simple model
(17)
(18)

為了設計簡化,設定前后輪輪距相等,假設前后輪的行駛條件相同,且左右輪的行駛條件也相同,則四輪汽車模型可化簡為兩輪簡化汽車模型,對應的兩輪汽車的側向動力學方程為
(19)
(20)

當輪胎側偏角較小時,側向輪胎力可以線性近似地表示為
(21)
(22)
式中:Cf為前軸側偏剛度;Cr為后軸側偏剛度。
設車身側偏角和橫擺角速率為汽車模型的狀態變量,并假設對于前輪轉向角在汽車高速行駛時相對較小,結合小角近似,將式(21)(22)代入(19)(20)中,得到線性二自由度汽車模型,即
(23)
(24)
狀態空間表達式為
(25)

3.2 不確定性簡化模型
為確保汽車側向避障精準控制,設計了考慮參數動態攝動的H∞魯棒控制策略[20]。側向避障過程中,汽車前輪側偏剛度Cf和后輪側偏剛度Cr動態變化,將影響路徑跟隨精準控制。但其取值區間已知,動態變化如式(26)。
(26)
將式(26)進行上線性分式變換,可得到式(27)。
(27)
式中Mf,Mr為上線性分式變換的系數矩陣。
結合汽車二自由度狀態空間和汽車系統模型中攝動參數對應的上線性分時變換,可得到含有參數攝動的汽車系統模型結構,具體參考文獻[20]。Gmds表示動力學標稱模型,其輸入為[uf1,uf2,ur1,ur1,u1,u2],輸出為[yf1,yf2,yr1,yr1,y1,y2],狀態變量為[β,γ],其狀態空間表達式為
(28)

汽車系統模型攝動參數部分可由一個結構固定參數未知的不確定對角矩陣[22]表示:
(29)
3.3 魯棒控制器設計
鑒于魯棒穩定性,閉環系統對于所有的G=Fu(G0,Δ)都必須滿足性能準則,即為S/KS混合靈敏度問題[20,22]。
(30)
式中:G=Fu(G0,Δ)為汽車系統模型,其包含標稱模型和攝動參數的不確定性;靈敏度權值函數Wp代表了干擾的頻率特性,反映了對系統靈敏度函數的形狀要求,使其具有低頻高增益特性;控制權值函數Wu可以限制控制量;S被定義為靈敏度函數。閉環系統結構如圖5所示。
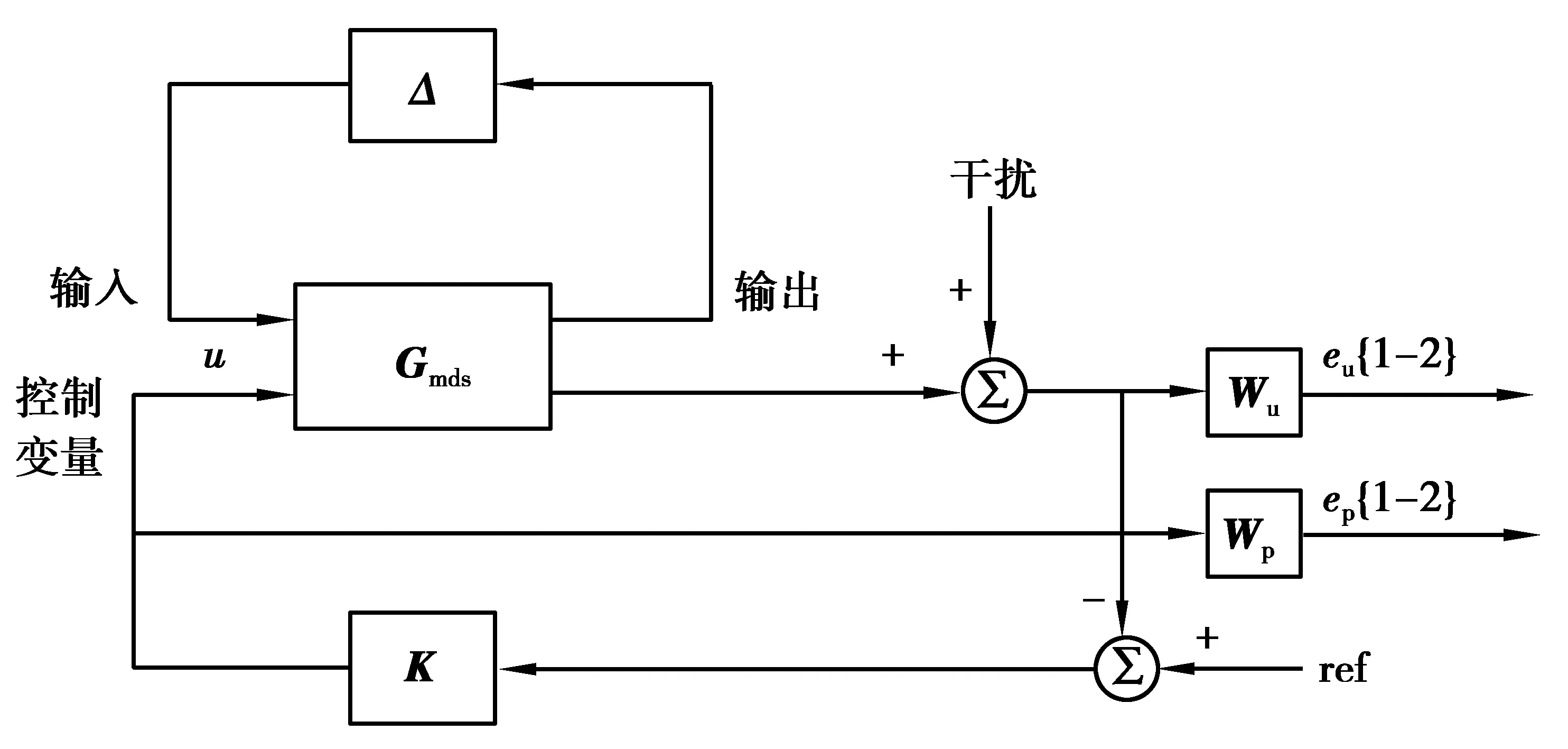
圖5 閉環系統關聯結構圖Fig. 5 Association structure of the closed loop system
(31)
(32)

從d到e=[epeu]T的閉環傳遞函數:
(33)
因此,式(33)混合靈敏度問題即可轉化為H∞標準控制問題,即:
‖Fl(P,K)‖∞<1。
(34)
4 仿真分析
為驗證基于碰撞預警的智能汽車側向避障控制策略,搭建Carsim與Simulink聯合仿真平臺。根據駕駛員預警后的反應,設計了2個測試工況。工況1,預警后,駕駛員及時干預;工況2,預警后,駕駛員未干預,控制策略主動側向避障控制。通過此2個工況,能夠測試人車共駕狀態下,預警算法預警效果;以及預警達到4級(臨界狀態)預警狀態而駕駛員未干預時,驗證控制策略自行側向避障控制效果。人車共駕智能汽車基本參數如表2所示。

表2 汽車模型參數
4.1 駕駛員干預
工況設置:前車以vC0=65 km/h的初速度行駛,自車初始車速vNx0=80 km/h,兩車初始間距SC0=120 m,兩車道間距H=3.5 m,駕駛員反應時間一般在0.4~1.0 s之間,考慮到不同駕駛員駕駛狀態存在差異,取1.0 s;克服踏板自由行程、制動期間隙時間為0.2 s;轎車制動系統一般都為液壓制動系統,則液壓系統起作用時間為0.3 s,路面附著系數最大值為0.7。為了驗證動態條件下有無駕駛員干預的預警效果,進行了無駕駛員和有駕駛員干預的兩種模式仿真實驗,驗證結果如圖6所示。
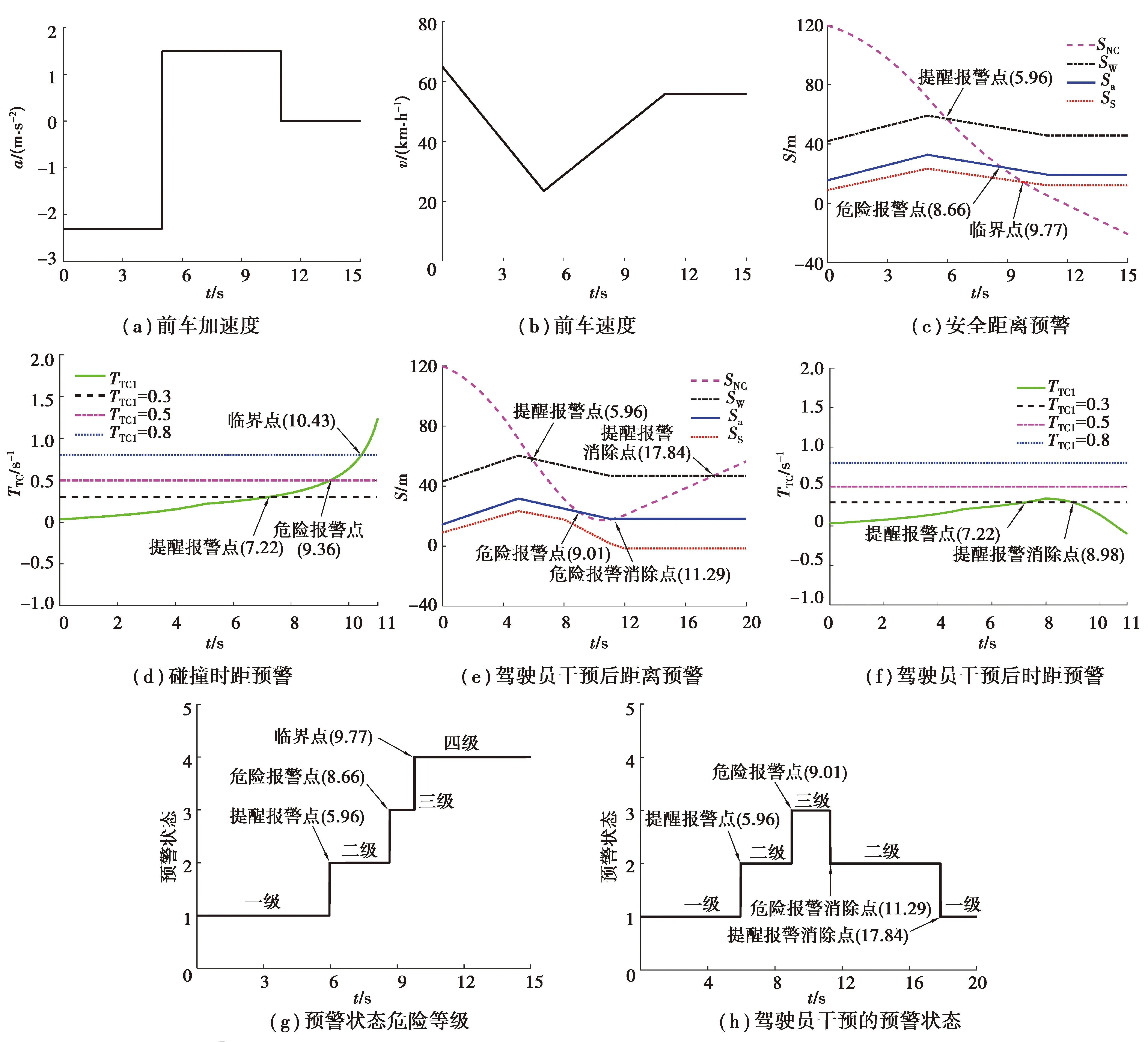
圖6 駕駛員干預的自車預警響應圖Fig. 6 Warning response with driver intervention
由圖6(a)(b)可知,前車加速度和速度動態變化,有利于驗證預警算法的動態預警能力。由6(c)(e)可知,每個預警級別參考值隨著前車和后車加速度和速度變化而變化,因此,預警算法能夠根據外界條件變化來實時決定不同預警層次的參考值,為人車共駕智能車精準預警和安全提供必要基礎。由圖6(c)(d)可知,實時間距和碰撞時距隨著前車和自車狀態動態變化而變化,且各自實時預警級別參考值形成交點,獲得了提醒報警點、危險報警點和臨界點預警狀態。圖6(e)(f)為駕駛員根據報警主動采取了干預,進行了制動操作后預警變化結果。由此兩圖可知,駕駛員采取行動后,危險報警點和臨界點時間都會延后;并且駕駛員持續制動,汽車報警結果動態變化甚至解除報警。因此,融合互補的多級預警算法能夠根據駕駛員動態介入,動態調整預警結果;并且,兩種預警方式不同安全級別的報警時間不同,預警結果以兩種預警方式早觸發的為預警依據,有利于提高預警提前性,為駕駛員干預或者控制器控制獲得更多控制時間。有無駕駛員干預的預警結果見圖6(g)(h)。
4.2 駕駛員未干預
在實際交通環境下,由于駕駛員疲勞或者工況危險等原因,當汽車進入危險工況,駕駛員未對汽車進行干預,汽車將發生碰撞事故。針對此工況,所提控制策略在預警后,駕駛員未做出反應到達4級(臨界狀態)預警狀態,將主動接管汽車進行主動側向避障控制,保證智能汽車安全。測試工況展現了從開始檢測到前方存在危險汽車,到最終實現智能汽車側向安全避障全過程,仿真結果如圖7。

圖7 側向避障控制仿真結果Fig. 7 Simulation results of lateral collision avoidance
由圖7(a)(b)可知,前車加速度和速度動態變化,有利于驗證動態工況多級預警算法預警準確性。由圖7(c)(d)可知,隨著前車速度急劇降低,多級預警算法先后實現了各種級別的預警。同時對比圖6(c)(d)和圖7(c)(d)上述兩工況的預警方式,安全距離和碰撞時間預警時間節點接近,但不同行駛狀態下,兩種預警方式在同安全等級下預警時間互有早晚。因此,通過采用時間早的節點能夠互補兩種預警算法,更好地確保在不同行駛狀態預警準確性,有效提高了人車共駕智能汽車避障安全性。融合互補的多級預警算法的預警結果見圖7(k)。
當4級(臨界狀態)觸發后,避障系統主動接管了汽車,進行規劃軌跡跟蹤控制,實現智能汽車側向避障控制。由圖7(e)(f)(g)(h)(i)可知,控制策略實現了位移、航向角和航向角速度良好跟蹤。經過計算可知,側向位移最大偏差量為0.077 m,最大誤差率為2.2%;航向角峰值誤差為0.26°,峰值誤差率為7.5%;航向角速度峰值誤差為0.05°/s,峰值誤差率為2.2%。由圖7(j)可知,航向角速度變化平穩,并且值在正負2.27°/s范圍內。因此,魯棒控制策略能夠保證避障過程中人車共駕智能車橫擺穩定性。
綜上所述,所提融合互補的多級預警算法能夠根據外界狀態的變化,實時調整各種級別的安全預警距離,為人車共駕智能車準確預警提供基礎;同時,彌補了實時間距和碰撞時距兩種方式不足,既能夠體現距離變化又能夠表示危險程度;并且能夠根據駕駛員干預程度,實時修正預警結果。人車共駕智能車預警到四級(臨界狀態)且駕駛員未干預汽車,控制策略自動接管了智能車,并克服了前后側偏剛度參數攝動,實現了側向避障控制且確保了智能車橫擺穩定性。
5 結 論
1)針對前車和人車共駕智能車速度和加速度動態變化,考慮了駕駛員駕駛狀態等因素,提出了汽車縱向安全距離模型。
2)提出了基于縱向安全距離模型和避障時間融合互補的多級預警算法,實現了既保證汽車避障安全,又能夠體現智能汽車危險狀態。此預警算法實現了動態環境下各級預警,應對了預警過程中駕駛員干預,獲得了多因素影響下實時準確的預警,為人車共駕智能車安全控制奠定了基礎。人車共駕智能車到達4級(臨界狀態)且駕駛員未干預汽車,所提控制策略主動接管了汽車進行側向避障,確保了汽車安全避障。
3)考慮了側向避障過程中參數動態攝動,設計側向避障魯棒控制器,實現了避障軌跡準確跟蹤,從而實現了智能汽車側向避障,并保證了避障過程智能汽車安全性和穩定性。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50