滾子包絡(luò)環(huán)面蝸桿傳動副裝配誤差分析
2021-06-24 08:34:08陳永洪鄭正鼎陳兵奎
重慶大學(xué)學(xué)報 2021年6期
唐 鵬,陳永洪,鄭正鼎,陳兵奎
(重慶大學(xué) 機(jī)械傳動國家重點(diǎn)實(shí)驗(yàn)室, 重慶 400044)
蝸桿傳動屬斜面?zhèn)鲃樱鳛辇X輪傳動的一個重要分支,其傳動原理與典型齒輪傳動的杠桿傳動原理有較大區(qū)別,蝸桿傳動副齒面相對滑動速度較大,齒面磨損較快。
將蝸桿傳動副共軛齒面之間的滑動摩擦改為滾動摩擦是減小摩擦系數(shù)提高傳動效率的有效途徑。Kato等[1]提出針輪蝸桿傳動,并對其結(jié)構(gòu)設(shè)計(jì)、加工工藝、傳動效率及潤滑條件等問題進(jìn)行了全面的研究,日本三共(SANKYO)株式會社成功地將滾柱包絡(luò)環(huán)面蝸桿傳動應(yīng)用于減速器生產(chǎn)。Siegmund等提出了滾珠環(huán)面蝸桿傳動,在蝸輪與環(huán)面蝸桿之間加入了鋼球作為蝸輪齒,并在鋼球和蝸輪母體球窩內(nèi)布滿小鋼珠以減小鋼球與蝸輪母體之間的滑動摩擦[2]。張光輝等[3]和陳永洪等[4]提出滾錐包絡(luò)環(huán)面蝸桿傳動,并進(jìn)行了嚙合理論、參數(shù)優(yōu)化、樣機(jī)制造及性能試驗(yàn)等方面的系統(tǒng)研究,證明滾錐包絡(luò)環(huán)面蝸桿傳動具有傳動效率高、承載能力大、使用壽命長及制造簡單等優(yōu)點(diǎn)。鄧星橋等[5-6]提出無側(cè)隙雙滾子包絡(luò)環(huán)面蝸桿傳動,所用蝸桿是以蝸輪齒面為原始母面包絡(luò)展成的環(huán)面蝸桿,蝸輪輪齒則是兩個能夠繞其自身軸線轉(zhuǎn)動的滾子,不僅具有滾子包絡(luò)環(huán)面?zhèn)鲃有矢摺Ш淆X數(shù)多、承載能力強(qiáng)等優(yōu)點(diǎn),還具有側(cè)隙可調(diào)及零側(cè)隙的特點(diǎn)。Chen等[7]建立了球面包絡(luò)環(huán)面蝸桿傳動的嚙合幾何學(xué),分析了誤差對傳動副接觸區(qū)域的影響規(guī)律。Wang等[8]分析了滾子包絡(luò)環(huán)面蝸桿傳動副的時變嚙合剛度,研究了滾子直徑對嚙合剛度的影響規(guī)律。Deng等[9]分析了滾子包絡(luò)環(huán)面蝸桿傳動減速器的潤滑流場。上述對滾子包絡(luò)環(huán)面蝸桿傳動副的研究主要是針對蝸桿的嚙合傳動性能、設(shè)計(jì)參數(shù)優(yōu)化、潤滑流場等方面[5-9]。但是單純在理論狀態(tài)下建立的數(shù)學(xué)模型并不能反映實(shí)際工況下傳動副的接觸情況,缺乏裝配誤差對齒面接觸的影響規(guī)律等理論指導(dǎo),則會導(dǎo)致在傳動過程中出現(xiàn)輪齒接觸不良、卡死等現(xiàn)象。
筆者基于滾子包絡(luò)環(huán)面蝸桿的傳動原理,建立了考慮裝配誤差的傳動副干涉分析模型,提出了干涉定量評價指標(biāo)及其數(shù)值計(jì)算方法,并系統(tǒng)地分析了中心距誤差、蝸桿軸向竄動量誤差、滾子蝸輪軸向誤差和軸交角誤差對滾子包絡(luò)環(huán)面蝸桿傳動副的接觸情況的影響規(guī)律。
1 滾子包絡(luò)環(huán)面蝸桿傳動副嚙合幾何學(xué)
1.1 幾何標(biāo)架及坐標(biāo)變換
滾子包絡(luò)環(huán)面蝸桿傳動副的蝸輪是以圓柱滾子為輪齒的組合體,環(huán)面蝸桿齒面是以滾子圓柱面為母面按嚙合運(yùn)動關(guān)系包絡(luò)展成,基于嚙合關(guān)系建立標(biāo)架如圖1所示。圖中空間固定標(biāo)架σm(om-xm,ym,zm)和σn(on-xn,yn,zn)為滾子蝸輪和蝸桿的初始位置,其底矢分別為(im,jm,km)和(in,jn,kn);滾子蝸輪與運(yùn)動標(biāo)架σ1(o1-x1,y1,z1)固連,并繞z1軸以角速度ω1轉(zhuǎn)動,環(huán)面蝸桿與運(yùn)動標(biāo)架σ2(o2-x2,y2,z2)固連,并繞z2軸以角速度ω2轉(zhuǎn)動;標(biāo)架σ1和σ2的底矢分別為(i1,j1,k1)和(i2,j2,k2);滾子蝸輪和環(huán)面蝸桿某瞬時的轉(zhuǎn)動角位移分別為φ1和φ2,且有φ1/φ2=ω1/ω2=Z2/Z1=i12,其中Z1為環(huán)面蝸桿頭數(shù),Z2為滾子蝸輪齒數(shù),i12為蝸桿傳動副傳動比;a為傳動副中心距。
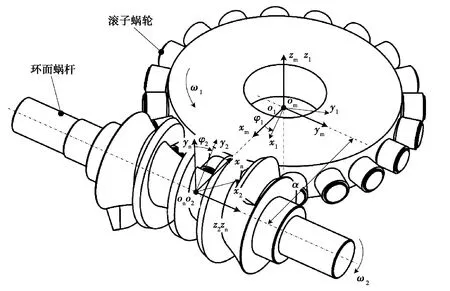
圖1 傳動副幾何標(biāo)架Fig. 1 Coordinate systems in the worm drive
由圖1所示幾何關(guān)系,有滾子蝸輪固連坐標(biāo)系σ1與環(huán)面蝸桿固連坐標(biāo)系σ2之間的轉(zhuǎn)換關(guān)系為:
(x2,y2,z2,1)T=Mn2MmnM1m(x1,y1,z1,1)T,
(1)

1.2 滾子齒面
建立滾子蝸輪齒面在其固連坐標(biāo)系的示意圖如圖2所示,圖中r為滾子半徑,u和θ為滾子齒面參數(shù)。
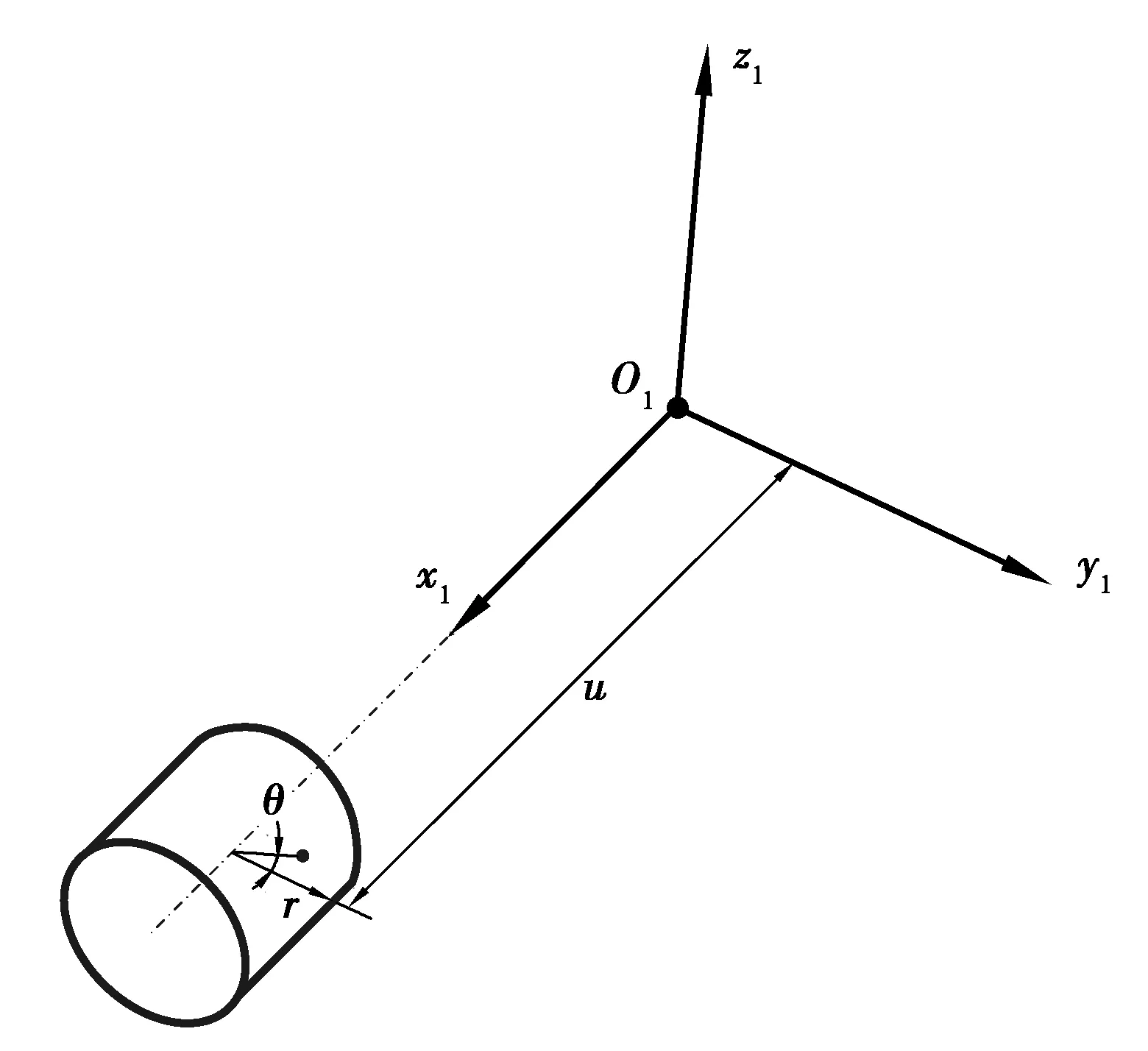
圖2 滾子蝸輪齒面Fig. 2 Tooth surface of the roller worm
則滾子蝸輪固連坐標(biāo)系σ1下滾子蝸輪的齒面位置向量為:
(2)
基于上述齒面方程式(2),由微分幾何關(guān)系[10]可得滾子蝸輪固連坐標(biāo)系σ1下滾子齒面的單位法向量為:
(3)
1.3 傳動副的嚙合關(guān)系
為了表示環(huán)面蝸桿與滾子齒面的相對運(yùn)動關(guān)系,同時考慮簡化計(jì)算而又不失一般性,令ω2=1 rad/s, 則ω1=1/i21=i12rad/s,通過坐標(biāo)變換及底矢轉(zhuǎn)換,可得滾子蝸輪固連坐標(biāo)系σ1下的齒面嚙合點(diǎn)處的相對速度為:
(4)
環(huán)面蝸桿齒面與滾子齒面保持連續(xù)嚙合,必須滿足在傳動中時刻處于相切接觸狀態(tài),即滿足條件[1]Φ=v(12)n1=0,得滾子蝸輪包絡(luò)環(huán)面蝸桿傳動的嚙合函數(shù)為:
Φ(u,θ,φ1)=ai12cosθ-usinθ-ui12cosφ1cosθ。
(5)
1.4 滾子齒面接觸線
滾子齒面上滿足嚙合方程式(5)的點(diǎn)即為傳動副在滾子齒面的瞬時接觸線。故滾子齒面接觸線方程為:
(6)
1.5 環(huán)面蝸桿齒面
將滾子齒面上滿足嚙合方程的點(diǎn)轉(zhuǎn)換至環(huán)面蝸桿固連坐標(biāo)系,得環(huán)面蝸桿齒面方程為:
(7)
x2=acosφ2-ucosφ1cosφ2-rcosθsinφ2-rcosφ2sinφ1sinθ,
y2=asinφ2+rcosθcosφ2-ucosφ1sinφ2-rsinφ1sinφ2sinθ,
z2=usinφ1-rcosφ2sinθ。
2 含裝配誤差的傳動副數(shù)學(xué)模型
2.1 幾何標(biāo)架及坐標(biāo)變換
在傳動副的實(shí)際裝配過程中難免會產(chǎn)生裝配誤差。將傳動副的裝配誤差分解到各個方向分量上,分別對傳動副在裝配過程中可能出現(xiàn)的中心距誤差、蝸桿軸向誤差、蝸輪軸向誤差及軸交角誤差進(jìn)行分析。為了分析簡便,在不失一般性的情況下假設(shè)滾子蝸輪為標(biāo)準(zhǔn)安裝位置,上述所有誤差均是環(huán)面蝸桿相對于滾子蝸輪而產(chǎn)生的,建立含裝配誤差坐標(biāo)系如圖3所示。
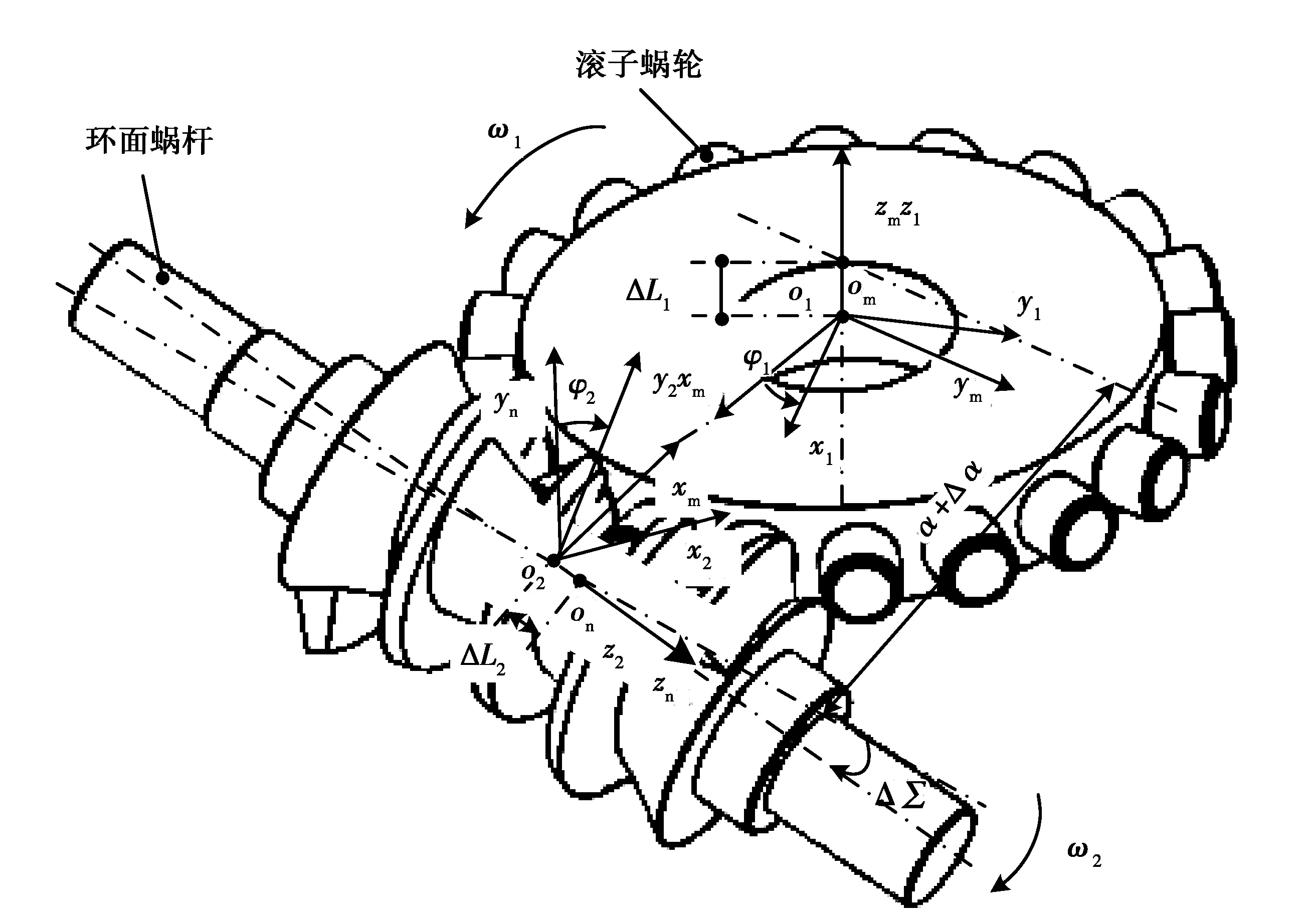
圖3 含裝配誤差的傳動副幾何標(biāo)架Fig. 3 Coordinate systems of the worm drive with errors
圖3所示含裝配誤差坐標(biāo)系中,考慮了蝸桿和滾子蝸輪間的誤差相對位移關(guān)系,所以蝸桿固定標(biāo)架σm與滾子蝸輪固定標(biāo)架σn之間的變換矩陣為:
(8)
式中:Δa為中心距誤差;ΔL2為蝸桿軸向誤差;ΔL1為蝸輪軸向誤差;ΔΣ為軸交角誤差。
此外,滾子蝸輪活動坐標(biāo)系σ1與其固定坐標(biāo)系σm的坐標(biāo)變換、蝸桿活動坐標(biāo)系σ2與其固定坐標(biāo)系σn的坐標(biāo)變換沒有發(fā)生新的誤差,相對位移保持不變。
2.2 含誤差的齒面方程
基于上述滾子蝸輪標(biāo)準(zhǔn)安裝的假設(shè),滾子蝸輪齒面為標(biāo)準(zhǔn)齒面,與式(2)一致。而環(huán)面蝸桿齒面則由式(8)的含裝配誤差變換矩陣進(jìn)行轉(zhuǎn)換后,得含裝配誤差的環(huán)面蝸桿齒面方程為:
(9)


2.3 干涉質(zhì)量評價
在裝配中產(chǎn)生蝸桿/蝸輪軸向誤差、中心距誤差和軸交角誤差后,滾子和蝸桿會產(chǎn)生不同程度的干涉情況,了解各誤差類型對干涉程度的影響規(guī)律對滾子包絡(luò)環(huán)面蝸桿實(shí)際生產(chǎn)裝配具有重要的指導(dǎo)意義。衡量它們之間的干涉質(zhì)量可以用干涉體在滾子上的截面面積大小來表示。由于干涉方向的多樣性,截面常會是面積較小的任意曲邊形,將干涉截面近似處理為三角形或者四邊形會在保留規(guī)律性的基礎(chǔ)上很大地縮減計(jì)算量。干涉截面為圖4所示的2種表現(xiàn)形式。

圖4 兩種干涉截面形式Fig. 4 Two types of the interference cross sections
圖4(a)所示為三角形干涉情況,3個頂點(diǎn)的坐標(biāo)分別為(xT1,yT1,zT1), (xT2,yT2,zT2) 和(xT3,yT3,zT3), 則總干涉面積為:
(10)
式中:
圖4(b)所示為四邊形干涉情況,4個頂點(diǎn)的坐標(biāo)分別為(xQ1,yQ1,zQ1) (xQ2,yQ2,zQ2)(xQ3,yQ3,zQ3)和(xQ4,yQ4,zQ4),則總干涉面積為:
(11)
式中:
P1=(aQ+bQ+cQ)/2,
P2=(cQ+dQ+eQ)/2。
2.4 干涉點(diǎn)求解
為了計(jì)算上述干涉區(qū)域面積,需獲取各頂點(diǎn)坐標(biāo)值。如圖5所示滾子蝸輪齒面與環(huán)面蝸桿齒面,點(diǎn)j為滾子蝸輪的滾子軸線上的一點(diǎn),坐標(biāo)為(xj,yj,zj),點(diǎn)k為環(huán)面蝸桿齒面上同一圓弧高度的環(huán)面螺旋線的一點(diǎn),坐標(biāo)為(xk,yk,zk)。若環(huán)面蝸桿齒面點(diǎn)與滾子蝸輪之間發(fā)生干涉,如圖5所示情況,則:
(12)

圖5 齒面坐標(biāo)點(diǎn)的距離關(guān)系Fig. 5 Distance relation of coordinate points on tooth surface
若環(huán)面蝸桿齒面點(diǎn)與滾子蝸輪之間不接觸,則:
(13)
各頂點(diǎn)處應(yīng)滿足:
(14)
結(jié)合滾子蝸輪齒面方程式(2)、含裝配誤差的環(huán)面蝸桿齒面方程式(9)和頂點(diǎn)坐標(biāo)值條件式(14),設(shè)R為計(jì)算點(diǎn)在滾子蝸輪坐標(biāo)系中的半徑值,即j點(diǎn)至蝸輪旋轉(zhuǎn)中心的距離,蝸桿嚙合轉(zhuǎn)角φ1的最小值φ11、最大值φ12及計(jì)算步長φ1h,采用圖6所示求解流程編制MATLAB程序,可求解各頂點(diǎn)坐標(biāo)值。

圖6 干涉頂點(diǎn)求解流程圖Fig. 6 Flow chart of solving the interference vertices
3 接觸特性實(shí)例分析
含裝配誤差的傳動副數(shù)學(xué)模型考慮了實(shí)際工況中蝸桿副誤差的主要來源,這種把誤差分量加入嚙合模型的分析思路已見于文獻(xiàn)[11]所研究的平面齒內(nèi)齒輪一次包絡(luò)鼓形蝸桿傳動中。文獻(xiàn)[11]中采用定性地觀察瞬時接觸線的分布來驗(yàn)證模型的正確性,本研究中將定量地分析干涉量隨誤差的變化規(guī)律。
為了驗(yàn)證上述理論的可行性和有效性,以表1所示參數(shù)的滾子包絡(luò)環(huán)面蝸桿傳動副為例,利用上述理論數(shù)學(xué)模型和含裝配誤差的數(shù)學(xué)模型,分析其理論接觸特性和含裝配誤差的接觸特性。

表1 蝸桿傳動副基本參數(shù)
3.1 理論接觸特性
根據(jù)滾子蝸輪齒面理論接觸線方程式(6)和設(shè)計(jì)參數(shù),繪制滾子齒面接觸線及傳動副齒面的理論接觸情況如圖7所示,可見滾子包絡(luò)環(huán)面蝸桿傳動副的理論接觸線為空間螺旋曲線,分布在滾子中間平面附近。

圖7 滾子蝸輪齒面理論接觸線示意圖Fig. 7 Spiral lines generated by MATLAB
3.2 帶裝配誤差的接觸特性
實(shí)際裝配中由于存在裝配誤差,滾子和蝸桿不再是規(guī)則的線接觸,而是存在干涉情況。根據(jù)上文提出的考慮裝配誤差的環(huán)面蝸桿數(shù)學(xué)模型,分別考察中心距誤差、蝸桿軸向誤差、蝸輪軸向誤差和軸交角對滾子包絡(luò)環(huán)面蝸桿傳動副的接觸特性的影響。
3.2.1 中心距誤差與干涉截面積的規(guī)律
以中心距增大為正誤差、減小為負(fù)誤差,進(jìn)行中心距誤差對滾子包絡(luò)環(huán)面蝸桿傳動副齒面接觸的影響規(guī)律分析。由于邊齒1、邊齒2和邊齒3、邊齒4的干涉截面積總和具有對稱關(guān)系,為了簡化冗余而不失代表性,只分析邊齒1、邊齒2和中心齒左右兩側(cè)齒面的干涉截面積總和。以表1實(shí)例參數(shù)為基礎(chǔ),中心距誤差取Δa∈[-0.10,0.10],其余參數(shù)不變,中心距誤差對滾子包絡(luò)環(huán)面蝸桿傳動副的干涉截面積影響規(guī)律如圖8所示。
圖8 中心距誤差與齒面干涉面積的關(guān)系Fig. 8 Relationship between the center distance error and the interference area
從圖8(a)中可以看出,各對齒對不同中心距誤差的敏感程度不同。中心齒理論上干涉面積為0,但邊齒的干涉截面積隨中心距誤差絕對值增大而增大,增大的變化率逐漸變小,外側(cè)的邊齒干涉面積大于內(nèi)側(cè)邊齒。干涉截面積以零誤差為軸對稱分布,這是由于當(dāng)誤差為正時,干涉發(fā)生在滾子蝸輪右齒面;而誤差為負(fù)時,干涉發(fā)生在左齒面,圖8(b)中分析的是5對滾子輪齒與環(huán)面蝸桿左右側(cè)齒面干涉截面積的累計(jì)值。
3.2.2 蝸桿軸向誤差與干涉截面積的規(guī)律
由于環(huán)面蝸桿齒面的對稱性,兩端竄動的效果等效,故只分析其向一端竄動時的接觸變化情況。考察蝸桿軸向誤差ΔL2對滾子包絡(luò)環(huán)面蝸桿傳動副接觸情況的影響,取ΔL2∈[0.00,0.10],其余參數(shù)不變,蝸桿軸向誤差對傳動副干涉情況的影響規(guī)律如圖9所示。

圖9 蝸桿軸向誤差與齒面干涉面積的關(guān)系Fig. 9 Relationship between the axial error of the worm and the interference area
從圖9可以看出,蝸桿軸向竄動量對蝸桿上的各對齒的影響基本相同,總體趨勢為增長率隨竄動量增大逐漸減小,提示在誤差產(chǎn)生的初期控制誤差的精度尤為重要。
3.2.3 滾子蝸輪軸向誤差與干涉截面積的規(guī)律
在分析滾子蝸輪的軸向誤差與干涉截面積關(guān)系時,根據(jù)環(huán)面蝸桿齒面的對稱性,同樣只需考察其向一個方向的偏移。取ΔL1∈[0.00,0.10],其余參數(shù)不變,計(jì)算所得干涉截面積大小如圖10所示。
圖10 蝸輪軸向誤差與齒面干涉面積的關(guān)系Fig. 10 Relationship between the axial error of gear and the interference area
蝸輪軸向誤差對傳動副干涉的影響程度較中心距誤差和蝸桿軸向誤差的影響小,這是由于在沿蝸輪軸方向上嚙合程度最小。滾子蝸輪軸線誤差對蝸桿上的各對齒的干涉影響基本相同,呈增長變緩的增大趨勢。
3.2.4 軸交角誤差與干涉截面積的規(guī)律
軸交角的誤差也是裝配誤差的重要分量之一。以沿滾子順時針方向旋轉(zhuǎn)為正,沿滾子逆時針方向旋轉(zhuǎn)為負(fù),取ΔΣ∈[-0.5°,0.5°],其余參數(shù)不變,計(jì)算所得各對齒干涉截面積如圖11所示。
圖11 軸交角誤差與齒面干涉面積的關(guān)系Fig. 11 Relationship between the intersection angle error and the interference area
當(dāng)軸交角誤差絕對值控制在0.5°以內(nèi)時,各對齒干涉量較小;且干涉截面積以誤差正負(fù)值對稱分布,隨著誤差絕對值增大而增大,然而其變化率相較之前3種誤差更大。
3.2.5 各誤差類型對干涉截面積的影響規(guī)律
分別對傳動副在裝配過程中可能出現(xiàn)的中心距誤差、蝸桿軸向誤差、蝸輪軸向誤差及軸交角誤差進(jìn)行分析。因軸交角誤差與它們量綱不同,故不在同一圖內(nèi)分析。由圖12可以看出,在相同的數(shù)值下,蝸桿軸向竄動量誤差對干涉截面積的影響最大,滾子蝸輪軸向誤差對干涉截面積的影響最小。干涉截面積隨裝配誤差增大而增大,但增長率下降。
4 結(jié) 論
1)建立了裝配誤差情況下的傳動副干涉分析模型,得出了傳動副理論干涉截面積;
2)滾子包絡(luò)環(huán)面蝸桿傳動副的理論接觸線為空間螺旋曲線,分布在滾子中間平面附近;
3)蝸桿軸向竄動量誤差對干涉截面積的影響最大,中心距誤差次之,滾子蝸輪軸向誤差影響最小;
4)在實(shí)際加工和裝配過程中,軸交角誤差對邊齒的干涉情況影響很大,需要將它控制在±0.5°以內(nèi)。