智能網聯汽車領域卓越工程師培養教學改革*
2021-06-26 07:23:28張毅李啟來郭強
汽車實用技術 2021年11期
張毅,李啟來,郭強
(1.重慶理工大學車輛工程學院,重慶 400054;2.重慶理工大學電氣工程學院,重慶 400054)
前言
電動化、智能化、網聯化正發展成為汽車產業的新業態[1]。同時,汽車產業逐漸從機械領域走向了新能源、智能網聯的發展方向[2]。這導致汽車產業在人才需求上對于新能源技術人才、智能網聯技術人才、汽車創新創業人才的稀缺[3]。所以需要提前研究面向智能網聯汽車領域的工程技術人才的培養模式,增強畢業生在技術推廣與企業的需求契合度。這是所有本科高校汽車類教學研究人員必須思考的課題[4]。
為解決上述問題,我院教學團隊推出基于工程化項目教學的智能網聯汽車工程技術人才培養模式。具體而言,利用分布式硬件在環(HIL)系統配置靈活的特點,使用車聯網(IOV)將一輛改裝過的純電動汽車(EV)接入分布式HIL仿真系統中,構成實車在環仿真(Vehicle-In-the-Loop,VIL)[5]。這樣此EV 既可以作為駕駛員輸入平臺,又能夠將硬件在環的HEV 系統的實際輸出功率實時地反映到EV 的動力輸出上。其中,需要學生參與設計并完成四個主要子系統:實車在環VIL、電池硬件在環BIL、發動機硬件在環EIL 和云端服務器。
下文分為三個部分:首先,從教學項目的整體設計入手,簡述了互聯網分布式實車在環仿真平臺(ID-VIL)的特點,并逐一討論了學生在搭建ID-VIL 系統中各個子系統時的教學難點與知識收獲;然后,基于CDIO 教學模式,指導學生以實車在環的方式對ID-VIL 系統進行了實驗測試,并對實驗結果進行了初步分析;最后,分析并總結了此教學改革項目對于提升學生工程應用能力的作用,并對如何實施卓越工程師培養計劃進行了一定思考。
1 項目化教學與仿真平臺搭建
ID-VIL 仿真的基本思路是通過無線車聯網(IOV),將一輛純電動車添加到現有的硬件在環仿真平臺,從而使該電動汽車不包含任何混合動力系統就可以進行混合動力汽車的仿真。同時,布置在硬件在環平臺上的混合動力汽車的子系統(如發動機和電池)可以像在實車上一樣工作。如圖1 所示,作為中央控制節點的云端服務器Cloud,電動汽車(VIL)和發動機硬件在環(EIL)、電池硬件在環(BIL)等硬件在環仿真平臺以“數據耦合”的形式耦合在一起,構成了ID-VIL仿真平臺。需要學生參與的項目包括:①電動汽車(EV)子系統;②云端服務器(Cloud)子系統;③發動機硬件在環(EIL)子系統;④電池硬件在環(BIL)子系統。ID-VIL 系統的詳細參數參見本團隊已發表的研究[6]。
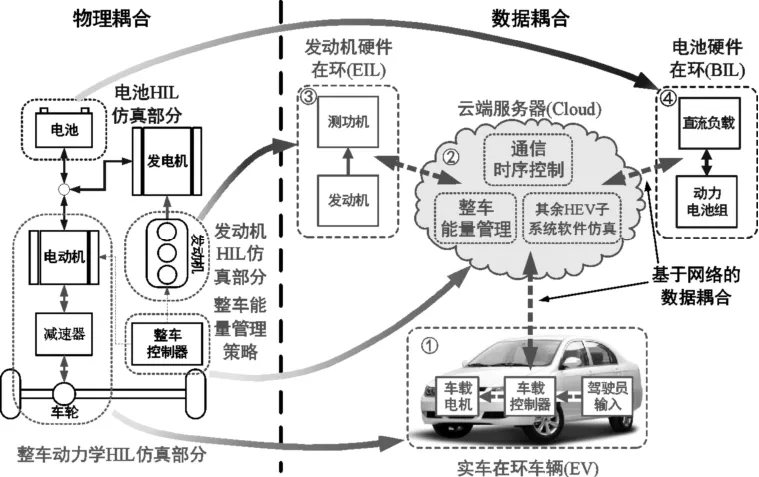
圖1 ID-VIL 仿真概述
1.1 電動汽車(EV)子系統
在EV 子系統中,學生需要對一輛純電動汽車(力帆620EV,圖2)進行改裝。需要將車載控制器采集到的駕駛員輸入(油門與剎車)信號通過車聯網(4G LTE 網絡)先發送給云端服務器,然后根據云端返回的給定轉矩控制電動機的輸出轉矩[7]。需要學生掌握車載CAN 總線通信協議、基于4G LTE 網絡的TCP/IP 通訊技術、車載控制器(VCU)對駕駛員輸入(油門和剎車)信號的處理過程。
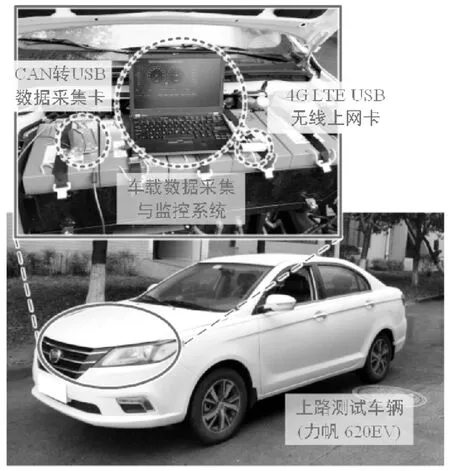
圖2 電動汽車(EV)子系統配置
1.2 云端服務器(Cloud)子系統
云端服務器是租用的重慶電信的虛擬云主機(CPU 4 核Xeon 2.13GHz,內存 8GB,帶寬 5Mb)。其主要負責三個功能:通信管理、整車能量管理策略、子系統仿真模擬(電動機、傳動系統)[8]。所以需要學生掌握基于套接字(Socket)的服務器/客戶端(Sever/Client)系統的構建、混合動力汽車(串聯)能量管理策略設計、部分子系統(電動機、變速箱)的仿真模型的搭建。
1.3 發動機硬件在環(EIL)子系統
如圖3 所示,本文發動機硬件在環選用的是AVL 160kW測功機和力帆乘用車公司的LF481Q3 發動機。發動機HIL系統需要從Cloud 接收需求轉矩轉速指令并執行,同時向Cloud 返回發動機當前狀態(實際輸出轉矩轉速和瞬時油耗)[9]。所以需要學生掌握發動機原理與檢測技術、AVL 測功機Puma 控制軟件使用與編程方法。
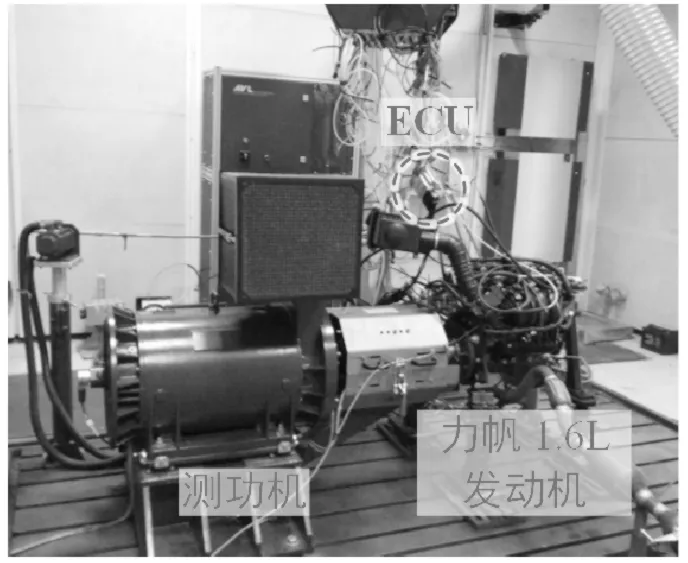
圖3 發動機硬件在環試驗臺架
1.5 電池硬件在環(BIL)子系統
因為在BIL 的配置過程中,假設每個電池之間不存在均衡問題。因此,原本由15 個單個電池(20V,30Ah)串聯組成的電池組,其在BIL 系統中只需要用一個單電池代替(圖4)。而此電池所需充放電功率為整個電池組的十五分之一[10]。BIL 包含四個部分:電子負載、電池、電池測試儀、控制臺。具體來說,云端服務器將所需的功率(放電時為正,充電時為負)發送到BIL。然后BIL 提供來估計電池的SOC,SOH,并和可用功率一起發送給云端服務器。此外電池測試儀也用來監測電池的內阻并計算SOH。所以學生需要掌握電池基本原理、電子負載的使用與編程方法、通過檢測電池內阻估算電池剩余壽命的原理與方法。

圖4 電池硬件在環
2 CDIO 教學與實車上路實驗
2.1 歷史數據收集
本研究的目標對象是在預定路線上行駛的車輛,如通勤交通和公共交通。如圖5 所示,路試行駛路線為重慶理工大學花溪校園周邊道路。整個路線長約15 公里,通過16 個紅綠燈,行駛時間約30 分鐘,包括高速公路(內環高速)和城市(其余部分)的交通狀況。

圖5 道路測試路線
從如圖5 所示的路線中收集了多組歷史駕駛數據。這些數據是在17:30 這種典型的高峰時段進行采集的。為了減少駕駛員的駕駛習慣對所記錄數據的影響,在保障安全和遵守規則的條件下,駕駛員被要求盡可能地跟隨車流。所以需要學生將工程管理知識用于實踐,協調各個數據采集小組,完成歷史駕駛數據的收集與分析整理。
2.2 基于前導車車間通信的路況預測
在測試車輛啟動之前,需要預測未來的路況信息。在本研究中,前導車的實時駕駛狀態被發送到云端服務器。很明顯,前導車越多,預測越準確,然而考慮到成本因素與實驗條件,只有兩個前導車(小組)參加實驗。如圖6 所示,每輛前導車(小組)的負責覆蓋一半的測試路線。這里需要學生靈活應用車間通信(V2V)與車流建模的知識,進而準確預測未來路況信息。

圖6 前導車的數據
2.3 道路試驗
為了實現實時整車能耗優化,本項目設計了一個具有兩層結構的互聯網分布式能量管理策略(ID-EMS)(圖7)。一方面,云端服務器上的頂層EMS 具有較強的計算能力和較大的存儲容量,因此側重于行程預測和全局優化。另一方面,實車上的底層EMS 通過IOV 連接到頂層EMS。通常其計算能力有限,因此它更合適實時局部優化,同時保證優化結果大體上跟隨頂層的優化結果。
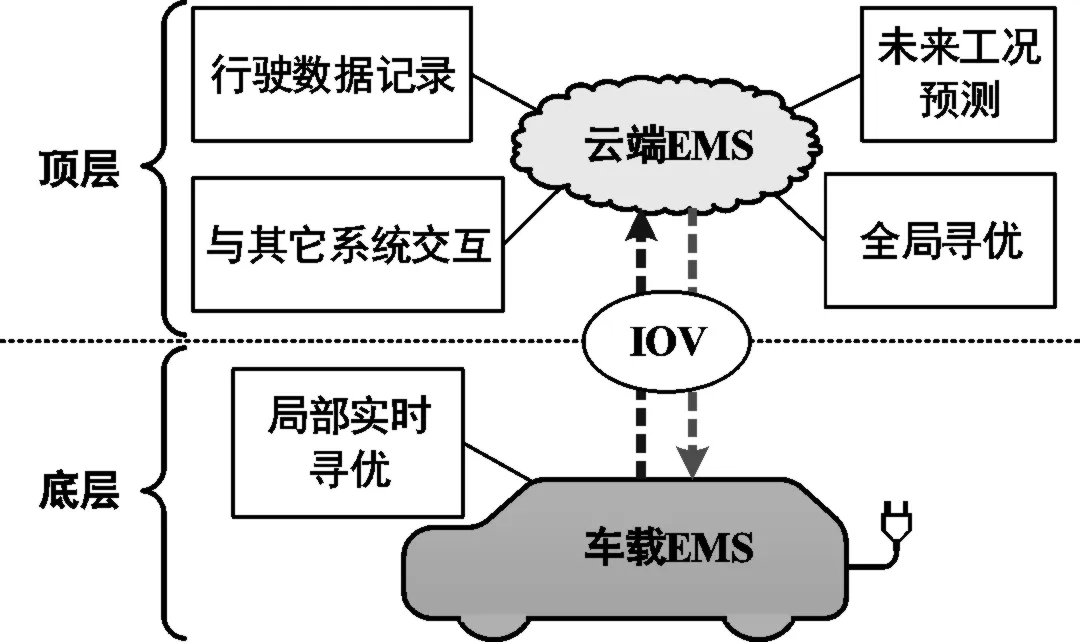
圖7 ID-EMS 的兩層結構
最后,實車上路測試小組完成如前所述的14.5km 的圍繞著重慶理工大學花溪校區的道路駕駛測試實驗。測試結果如圖8 所示,其中,代表實際SOC 的紅線大體上跟隨著黃帶,這說明底層EMS 參考了頂層EMS 的全局優化結果。這為車載控制器的能量管理提供了一定的靈活性,同時又不會使結果偏離全局優化太遠。在此試驗中,參與的學生實踐了整車能量管理策略的設計與實現,并且通過一個包括若干分布式硬件臺架協同的實車路試,親身感受了混動系統的工作過程與駕駛體驗。期間需要學生掌握的知識包括:整車能量管理策略、最優化理論、車輛測試技術。

圖8 ID-EMS 的實驗結果
3 結論
若要培養適應智能網聯汽車發展所需知識結構及綜合素質高的卓越工程技術人才,那么大學期間必須培養學生的實踐能力、創新能力、就業能力和創業能力這“四種能力”。基于互聯網分布式實車硬件在環仿真平臺的教學改革結合了大學生創新項目的多樣性、實用性及專業性等特色,利用實踐教學幫助學生加深對理論知識的理解,培養學生獨立思考及利用已有知識體系解決復雜工程問題的能力,使學生主動的參與教學過程,有目的的獲取有用的信息,并在一個團隊中發揮自己的作用,最大地發揮學生自身的主觀能動性,這樣有利于培養學生的工程意識,工程素質和工程實踐能力。
猜你喜歡
作文大王·笑話大王(2021年4期)2021-04-26 19:00:35
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
電影(2018年9期)2018-11-14 06:57:21
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
