考慮形狀差異的RFS 多目標跟蹤性能評估方法
2021-06-26 03:59:06王碧垚王永齊
火力與指揮控制 2021年5期
關鍵詞:差異
王碧垚,王永齊,顧 鵬
(中國電子科技集團公司第二十九研究所,成都 610036)
0 引言
多目標跟蹤是雷達、電子偵察、導航、空中交通管制等設備/系統數據處理中的重點內容之一,其跟蹤性能的好壞對系統整體性能有著非常重要的影響。近年來,隨機有限集(RFS)統計學理論作為一種友好的貝葉斯理論工具被廣泛關注,基于RFS 的多目標跟蹤方法成為研究熱點[1],該方法不同于傳統的基于數據關聯的多目標跟蹤方法,對其進行性能評估時不適合采用均方根誤差指標。
針對RFS 多目標跟蹤評估問題,文獻[2]率先給出了多目標系統下脫靶距離的定義與性質,提出使用Hausdorff 距離和最優質量轉換(Optimal Mass Transfer,OMAT)距離對跟蹤性能進行綜合評估,并對比了兩者在勢不一致時的敏感程度。Schuhmacher等人[3]分析了文獻[2]中兩種距離的缺陷后提出了OSPA 距離,引入一個可調參數來控制位置誤差和勢誤差的懲罰程度,提高了評估的靈活性。文獻[4-5]注意到跟蹤器輸出的航跡通常為帶標簽的時間序列,于是引入航跡標簽誤差后,采用標簽OSPA(Labeled OSPA,L-OSPA)距離進行評估。文獻[6]強調了協方差信息在濾波中的重要性,提出在計算OSPA 距離時使用Hellinger 距離替代歐氏距離。文獻[7]利用多目標狀態估計器提供的航跡質量信息在OSPA 距離上改進得到了Q-OSPA 距離,并指出當分配每個估計器相同質量時Q-OSPA 就退化為OSPA 距離。文獻[8]考慮了航跡錯誤、丟失、漏檢等現象后,在OSPA 距離基礎上提出了一種更完備的評估方法。Beard 等人基于OSPA 距離直接在航跡空間中引入時間權重,構造出OSPA(2)距離,證實了OSPA(2)完全滿足公理化特性并能綜合反映航跡斷裂和航跡切換問題[9],最后說明了OSPA(2)的優勢和其局限性[10]。國內學者也對該問題進行了研究,文獻[11]在充分考慮虛假估計和漏檢目標問題后,對OSPA 距離進行了修正并驗證了修正后指標的合理性。文獻[12-13]通過實例詳細分析了圓丟失率、Wasserstein 距離、Hausdorff 距離、OMAT 距離、OSPA距離以及L-OSPA 距離等指標的特點和適用場合。
上述文獻提出的OSPA 距離及其各種改進/修正形式均沒有考慮目標間可能存在的幾何形狀信息,而在部分多目標跟蹤場景中,如編隊飛行目標、協同作戰目標等,這時目標點組成的形狀信息對作戰意圖理解、威脅估計有著重要的意義,因而在性能評估時,理應考慮對該形狀差異的度量。為解決這一問題,提出了一種考慮形狀差異的改進OSPA 距離,并基于傅里葉描述子給出了形狀差異度量的計算公式,仿真表明所提改進方法提高了評估的完備性。
1 問題描述


1)當多目標存在某種協同運動關系時,其組成的形狀圖也是非常重要的信息,而濾波器B 在跟蹤時具有較高的形狀保持能力,根據它的跟蹤結果得到的態勢圖,更利于指揮員對作戰要素的行為意圖作出更加準確的理解和判斷;
2)濾波器B 的跟蹤結果組成的幾何形狀相比真實形狀,幾乎可以認為出現了整體偏移,那么濾波器B 就存在潛在的可矯正性,即借助其他傳感器或者信息引入某種誤差配準算法對跟蹤結果進行矯正,從而可以減小每個目標的位置誤差。
因此,是否可以考慮引入某種形狀誤差的度量構造新的OSPA 距離,使其在傳統OSPA 距離的基礎上,還能反映估計出的目標幾何形狀與真實目標幾何形狀之間的接近程度,對濾波器進行全面評估或比較,為評估人員提供更加有效的結論。

圖1 目標真實狀態和濾波器估計狀態
2 OSPA 距離

截止參數c 可以理解為用來決定勢誤差(目標數估計誤差)部分相對于位置誤差部分的權重。c 越小,表示越關注位置誤差,c 越大,表示越關注勢誤差。文獻[3]論證了OSPA 距離作為度量指標滿足3個度量公理,并且關于計算OSPA 距離的程序實現給出了兩種具體方法,不再贅述。
3 改進的OSPA 距離(F-OSPA)
3.1 F-OSPA 距離構造
為了解決第1 節描述的問題,構造出式(2)的一種改進形式:


顯然新構造的F-OSPA 距離也存在局限性,并不適用于n≤2 的情況。
3.2 形狀差異度的計算
在模式識別、圖像處理領域,傅里葉變換作為頻域分析的重要手段,通常用來進行形狀表示、形狀分析和特征識別、形狀分類以及形狀檢索[14-15],而傅里葉描述子(Fourier Descriptors,FD)作為形狀邊界曲線的傅里葉變換系數,可以描述多邊形的形狀邊界,通過計算兩個形狀FD 的相似距離就可以表示其差異程度[16]。
將多目標位置組成的多邊形邊界表示為順序連接的點,每個點K 用復數表示為弧長s 的函數[15]:
假定邊界有M 個點,則邊界可視為M-1 個線段的連續累加。令sk為點K 沿邊界到參考點之間的弧長,則


其中,An和Bn分別表示為

4 仿真與分析
4.1 F-OSPA 距離和OSPA 距離對比分析
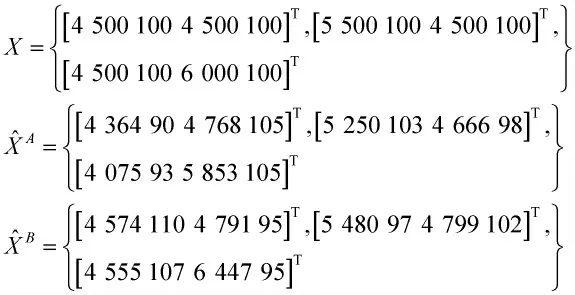
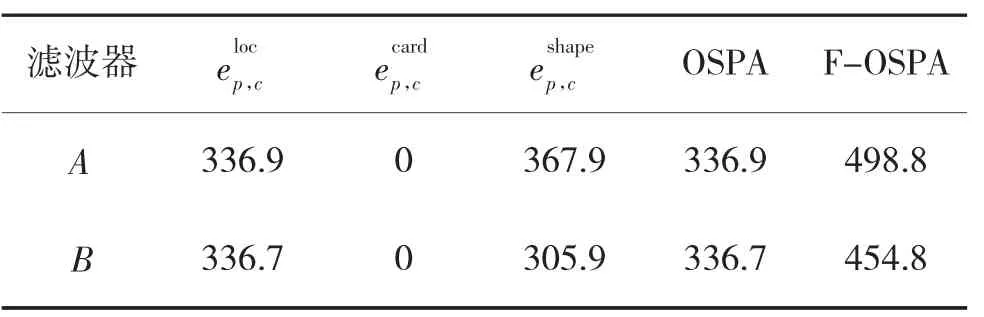
表1 F-OSPA 和OSPA 距離計算結果
由表1 中的計算結果可知,兩個濾波器的OSPA 距離非常接近,幾乎沒有可分辨性,得出的結論自然是兩個濾波器估計效果相當,但考慮形狀差異后通過對比F-OSPA 距離可知,濾波器B 的性能明顯優于濾波器A,這個評估結論更符合直觀理解。F-OSPA 距離可以反映出濾波器在目標間形狀估計方面的優勢。
4.2 基于F-OSPA 距離的GMPHD 算法評估

上式中新生目標的狀態均值x1=[-600,10,500,0]T,x2=[-400,10,1 500,0]T,新生協方差陣Pγ=diag([400,400,400,400]T),采用GM-PHD 濾波算法完成跟蹤過程。具體的目標運動信息如表2 所示,目標運動真實軌跡見圖2,顯然即使此處是針對點目標的跟蹤估計問題,但這些點目標形成的形狀信息依然對態勢理解有著重要意義。

表2 目標運動想定信息
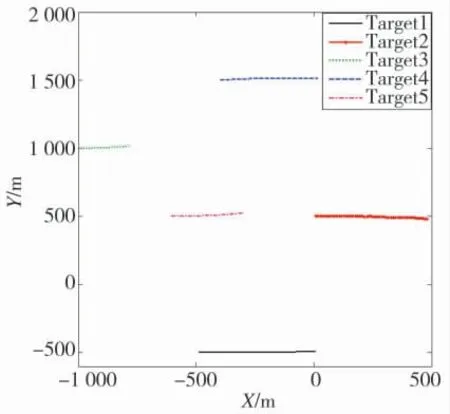
圖2 目標運動軌跡
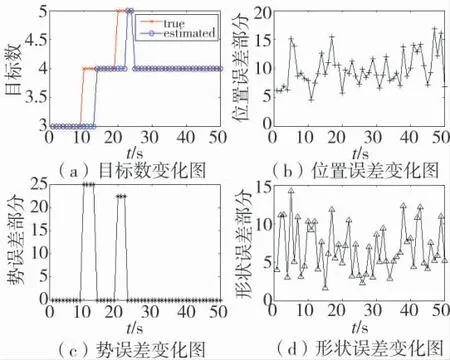
圖3 各分誤差結果
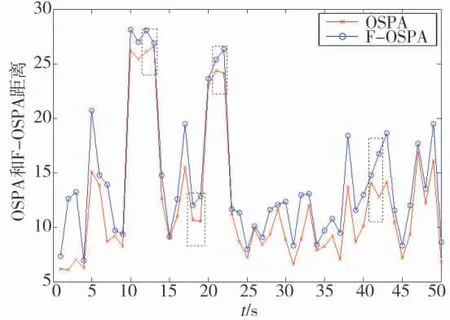
圖4 F-OSPA 和OSPA 距離對比分析
結果分析:圖3 給出了目標真實數目和估計數目比較結果以及F-OSPA 的3 部分誤差,對于該仿真場景參數取為10 時,形狀誤差部分與其他兩部分誤差數量級相當。圖4 比較了F-OSPA 距離和OSPA 距離,觀察虛線框選出的部分可知,F-OSPA距離的變化趨勢與OSPA 距離的變化趨勢有時并不一致,因為F-OSPA 的變化趨勢由3 類誤差共同決定,而OSPA 距離的變化趨勢只由兩類誤差決定,可見F-OSPA 距離可以提供更加完備的評估結論。需要說明,此處基于某單次仿真的結論分析,僅是為了方便闡述采用F-OSPA 距離進行評估的具體實施流程,并不是研究GM-PHD 濾波算法本身的優劣,而如果是研究算法性能,應該計算多次蒙特卡洛仿真下的平均F-OSPA 距離才有意義。
5 結論
本文針對隨機有限集框架下多目標跟蹤算法的性能評估問題,如協同作戰目標等,提出了一種考慮形狀差異的綜合度量指標,即F-OSPA 距離。首先結合跟蹤場景描述了采用OSPA 距離進行評估時可能不完備的情況,然后利用傅里葉描述子對形狀的表達特性,提出了包含形狀差異度量的F-OSPA 距離,并基于傅里葉描述子歐氏距離給出了形狀差異度量的計算公式。仿真結果表明,F-OSPA 距離引入形狀誤差度量,彌補了僅包含位置誤差和勢誤差的OSPA 距離的不足,針對部分跟蹤評估需求可以提供更加完備的評估效果。
猜你喜歡
英語世界(2023年10期)2023-11-17 09:19:16
汽車實用技術(2022年10期)2022-06-09 11:16:58
音樂探索(2022年2期)2022-05-30 21:01:37
收藏界(2019年3期)2019-10-10 03:16:40
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
中國特種設備安全(2018年11期)2019-01-08 02:08:32
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
中國非營利評論(2017年1期)2017-11-09 03:09:10
海外華文教育(2017年8期)2017-11-07 04:42:02
現代語文(2016年21期)2016-05-25 13:13:50
