鋪絲機(jī)器人振動特性分析及鋪放工件位置優(yōu)化
2021-06-27 08:03:20牛雪娟武金超
機(jī)械設(shè)計與制造 2021年6期
關(guān)鍵詞:振動實(shí)驗(yàn)
牛雪娟,武金超
(天津工業(yè)大學(xué)機(jī)械工程學(xué)院,天津 300380)
1 引言
隨著經(jīng)濟(jì)社會的快速發(fā)展,碳纖維以其優(yōu)異的力學(xué)性能廣泛使用于航天軍事領(lǐng)域[1]。由于航天軍事領(lǐng)域的產(chǎn)品要求高質(zhì)量高標(biāo)準(zhǔn),普通人工鋪放碳纖維預(yù)浸料窄帶不僅效率低,而且鋪放后的質(zhì)量達(dá)不到保障。六軸工業(yè)機(jī)器人以其高效率、低成本的優(yōu)勢,被應(yīng)用在各個生產(chǎn)一線。結(jié)合上述產(chǎn)品要求和設(shè)備特性,提出鋪絲機(jī)器人作為鋪放碳纖維預(yù)浸料窄帶的設(shè)備。然而在實(shí)際鋪放過程中受到工業(yè)機(jī)器人柔性部件彈性變形的影響[2],振動會隨之產(chǎn)生并最終降低鋪放定位軌跡精度。
振動的抑制,一般分為主動抑制和被動抑制兩種[3]。被動抑制就是改變結(jié)構(gòu),提高本身固有抗振特性。主動抑制即利用反饋控制,實(shí)時改變外部輸入以達(dá)到精確控制的目的。文獻(xiàn)[4]利用傳感器檢測鋪放邊緣位置,以便校正鋪絲工具中心點(diǎn)的實(shí)際鋪放軌跡,最終證實(shí)該方法對因鋪放機(jī)器人振動帶來的碳纖維預(yù)浸料窄帶間的間隙問題,具有很好的效果。文獻(xiàn)[5]研究了鋪絲機(jī)器人連接組件間的振動,在傳感器原件及數(shù)據(jù)記錄器搭建的測試實(shí)驗(yàn)平臺上,采集并分析了不同工作場景下的設(shè)備的頻率特征,并以此優(yōu)化了工廠的布局。國內(nèi),柯輝[6]通過調(diào)整機(jī)器人輸入信號大小,繼而達(dá)到對末端殘余振動的主動抑制。杭強(qiáng)[7]對機(jī)器人工作運(yùn)動軌跡振動進(jìn)行了跟蹤測量,得到了軌跡振動時域信號,提出了機(jī)器人工作時各關(guān)節(jié)點(diǎn)應(yīng)避開本體各階固有頻率,減少共振現(xiàn)象。梁捷[8]提出了對關(guān)節(jié)的彈性變形進(jìn)行柔性補(bǔ)償?shù)闹鲃诱駝右种啤9娓9]針對具有末端附加質(zhì)量的柔性機(jī)械臂彈性振動問題,提出采用基于遺傳算法的線性二次型控制方法對其進(jìn)行抑振控制。
鋪絲裝置結(jié)構(gòu)復(fù)雜,對其進(jìn)行結(jié)構(gòu)優(yōu)化,將是件浩繁的工程。通過增加傳感器設(shè)備和反饋調(diào)節(jié)系統(tǒng),雖然可以提高工作過程中的定位精度和軌跡精度,但這將增加鋪放裝置的復(fù)雜程度和制造成本。通過對鋪絲機(jī)器人的振動特性進(jìn)行實(shí)驗(yàn)分析研究,獲取在關(guān)機(jī)和工作兩種工況下,不同位姿點(diǎn)處鋪絲裝置的一階和二階頻率,并以此優(yōu)化鋪放工件的擺放區(qū)域,從而達(dá)到鋪放過程中減少振動和減小鋪放工作范圍的目的。
2 鋪絲裝置結(jié)構(gòu)特性與優(yōu)化目標(biāo)
2.1 鋪絲裝置結(jié)構(gòu)特性
鋪絲裝置作為末端執(zhí)行器,通過螺栓連接在機(jī)器人的末端法蘭上,隨著機(jī)器人共同運(yùn)動完成指定的軌跡鋪放。實(shí)驗(yàn)中采用的鋪放裝置是南京航空航天大學(xué)自主研發(fā)的兩絲束鋪絲裝置,如圖1所示。碳纖維預(yù)浸料窄帶經(jīng)過送紗輥后,在導(dǎo)向槽的牽引下,緊接著在夾緊機(jī)構(gòu)、重送機(jī)構(gòu)和剪切機(jī)構(gòu)的作用下,最終在加熱裝置的作用下完成對碳纖維預(yù)浸料窄帶的鋪放作業(yè)。該裝置實(shí)現(xiàn)了碳纖維預(yù)浸料窄帶鋪放快速成型,解決了人工鋪放效率低和成本高等劣勢。根據(jù)鋪放裝置的工藝尺寸并將其實(shí)體建模后,在三維建模軟件中按照等鋁型材材質(zhì)設(shè)定后,質(zhì)量為20.35kg。為了確保碳纖維預(yù)浸料窄帶的鋪放具有正確的位置和足夠的壓實(shí)力,鋪絲裝置壓輥必須相對于表面幾何形狀作精準(zhǔn)定向。鋪絲裝置的定位用笛卡爾坐標(biāo)系來描述,鋪絲裝置關(guān)節(jié)軸線(z7)必須實(shí)時垂直于待鋪放工件的表面,鋪放方向(x7)是沿著設(shè)定軌跡的切線方向,如圖2所示。
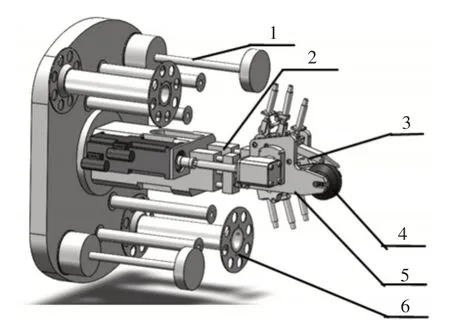
圖1 鋪絲裝置Fig.1 The Placing Device
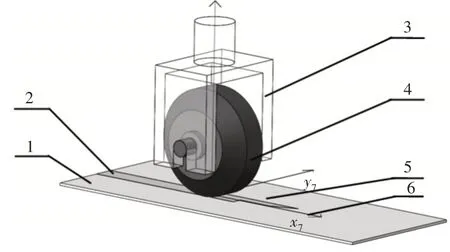
圖2 鋪放裝置相對于層合板的空間姿態(tài)Fig.2 Spatial Orientation of the Placement Device Relative to the Laminate
基于上述的鋪放工藝和位姿特性要求,鋪絲機(jī)器人的位姿狀態(tài)要不斷地進(jìn)行轉(zhuǎn)換,尤其是在壓輥下壓和遠(yuǎn)離鋪放工件表面時,鋪絲裝置隨之產(chǎn)生振動。振動的存在不僅會帶來噪聲這種工作環(huán)境惡化的現(xiàn)象,也會造成鋪放裝置笛卡爾坐標(biāo)系的位置、方向和路徑軌跡精度降低的問題,最終造成碳纖維預(yù)浸料窄帶帶間的重疊、間隙等缺陷。因此進(jìn)行振動特性分析,保證鋪放精度與質(zhì)量是相當(dāng)緊迫的。
鋪絲裝置的振動特性分析,單純對其進(jìn)行理論計算,達(dá)不到對鋪放裝置一、二階頻率的精確獲取。故利用錘擊對鋪放裝置施加激勵,傳感器實(shí)時采集響應(yīng)點(diǎn)反饋的信號,利用信號采集系統(tǒng)完成一、二階振動頻率的獲取。
2.2 鋪絲裝置工作范圍約束及優(yōu)化目標(biāo)
機(jī)器人的整個工作空間(一個類球體)中的一部分我們限定為我們可行的機(jī)器人的操作空間。在進(jìn)行鋪放工件位置優(yōu)化過程中,要對鋪絲機(jī)器人工作范圍進(jìn)行分析,以保證鋪放工件位置在合理的鋪放操作空間內(nèi)。從而達(dá)到鋪絲機(jī)器人關(guān)節(jié)活動角度小,工作過程中振動相對較弱的目的。本次研究中采用的工業(yè)機(jī)器人型號為KUKA KR60-3,軸1的工作范圍為(-185~185)°。根據(jù)實(shí)際鋪放過程中,鋪放工件的擺放一般是在機(jī)器人的正前方,故將軸1的工作范圍限定在(-90~90)°;根據(jù)鋪放工件的工藝尺寸等約束條件,將可行的工作空間劃分為若干個區(qū)域,圖3中的測試點(diǎn)是這些區(qū)域的代表點(diǎn)。其中測試點(diǎn)1、3、6、8的工具擺放的高度為800mm,測試點(diǎn)2、4、5、7的工件擺放高度為1200mm。
本次實(shí)驗(yàn)以工件放置的x、y坐標(biāo)范圍為優(yōu)化參數(shù)、在一階頻率幾乎相同的情況下,以鋪放裝置的二階固有頻率最大為目標(biāo)函數(shù)、機(jī)器人的實(shí)際工作空間以及工件的具體尺寸為約束條件,利用測試點(diǎn)處的振動頻率特性來優(yōu)化工件的擺放位置。

圖3 鋪絲機(jī)器人工作范圍Fig.3 The Automated Fiber Placement Robotic Work Range
3 鋪絲裝置振動分析實(shí)驗(yàn)
3.1 振動分析實(shí)驗(yàn)方案
進(jìn)行實(shí)驗(yàn)之前,應(yīng)當(dāng)制定行之有效的實(shí)驗(yàn)方案,以便提高實(shí)驗(yàn)進(jìn)程和效果。本次實(shí)驗(yàn)中采用的是單點(diǎn)激勵的方式,在敲擊的過程中要保證每次錘擊的力度和間隔時間的均勻性,從而確保信號采集的穩(wěn)定性;傳感器布置在鋪絲裝置與機(jī)器人法蘭連接處,以便采集整個鋪放裝置的振動信號。實(shí)驗(yàn)是在江蘇東華測試技術(shù)股份有限公司生產(chǎn)的DH5927動態(tài)信號測試分析系統(tǒng)上進(jìn)行的;傳感器是三向壓電式加速度傳感器,可分別輸出x、y、z軸向加速度信號,最終實(shí)驗(yàn)方案,如圖4所示。

圖4 振動分析實(shí)驗(yàn)示意圖Fig.4 Vibration Analysis Experiment Diagram
3.2 振動分析實(shí)驗(yàn)過程
如圖3所示,原點(diǎn)為鋪絲機(jī)器人的底座中心點(diǎn),x軸為鋪放方向。本次實(shí)驗(yàn)中考慮到鋪絲機(jī)器人不同工作狀態(tài)下,采用兩種工況進(jìn)行對比試驗(yàn),每種工況又分為八種位姿下進(jìn)行數(shù)據(jù)的采集。實(shí)驗(yàn)中的八種位姿姿態(tài)的分布,需按(-30~82.5)°范圍內(nèi)的測試點(diǎn)進(jìn)行布置。
工況一:將鋪絲機(jī)器人依次運(yùn)動到八個不同位姿測試點(diǎn)后將其處于關(guān)機(jī)狀態(tài)下,在鋪絲裝置底部施加激勵進(jìn)行數(shù)據(jù)的采集。
工況二:鋪絲機(jī)器人處于工作狀態(tài)下,在鋪絲裝置底部施加激勵,模擬鋪放過程中受力狀況,并在八種位姿點(diǎn)進(jìn)行數(shù)據(jù)的采集,其中,上述位姿點(diǎn)的實(shí)驗(yàn)狀態(tài)之一,如圖5所示。

圖5 位姿實(shí)驗(yàn)狀態(tài)Fig.5 Pose Experiment State
4 實(shí)驗(yàn)分析與結(jié)果
4.1 數(shù)據(jù)采集與分析
完成對各個位姿點(diǎn)數(shù)據(jù)的采集,工況一和工況二鋪放裝置在三個方向的頻率變化對比圖,如圖6、圖7所示。對瀑布圖進(jìn)行數(shù)據(jù)處理,最終得到的一、二階振動頻率,如表1、表2所示。
對比表1和表2中數(shù)據(jù),x、y、z軸方向一階頻率除了在位姿點(diǎn)(6~7),(7~8)存在相對較大的變化外,其余位姿點(diǎn)處頻率變化相差無幾;各個位姿點(diǎn)處x、y、z軸方向上二階頻率則有較大的變化。
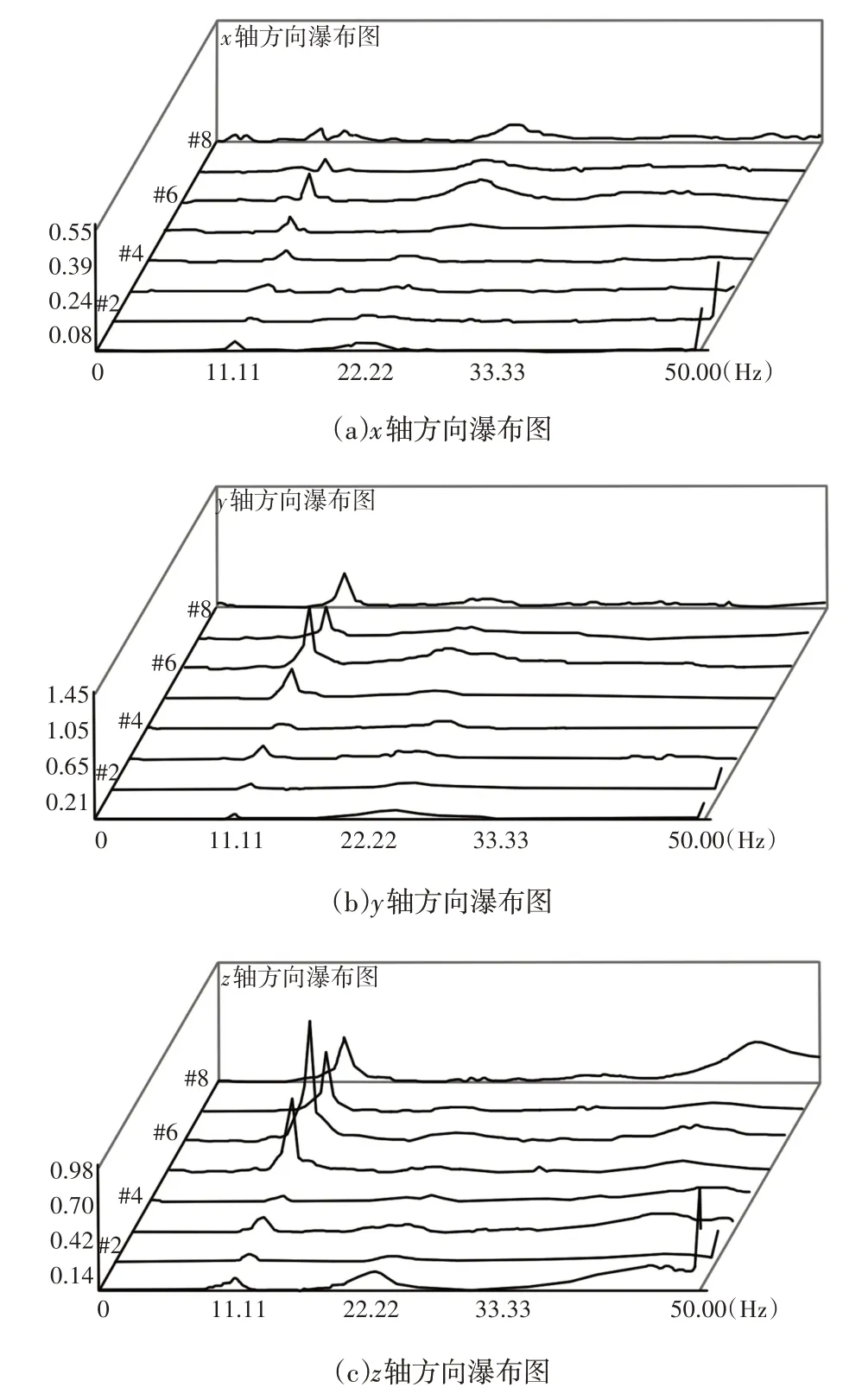
圖6 工況一下的x、y、z軸上的頻響函數(shù)曲線瀑布圖Fig.6 Frequency Response Function Curve Waterfall Diagram on x、y、z Axes of Working Condition One


圖7 工況二下的x、y、z軸上的頻響函數(shù)曲線瀑布圖Fig.7 Frequency Response Function Curve Waterfall Diagram on x、y、z Axes of Working Condition Two
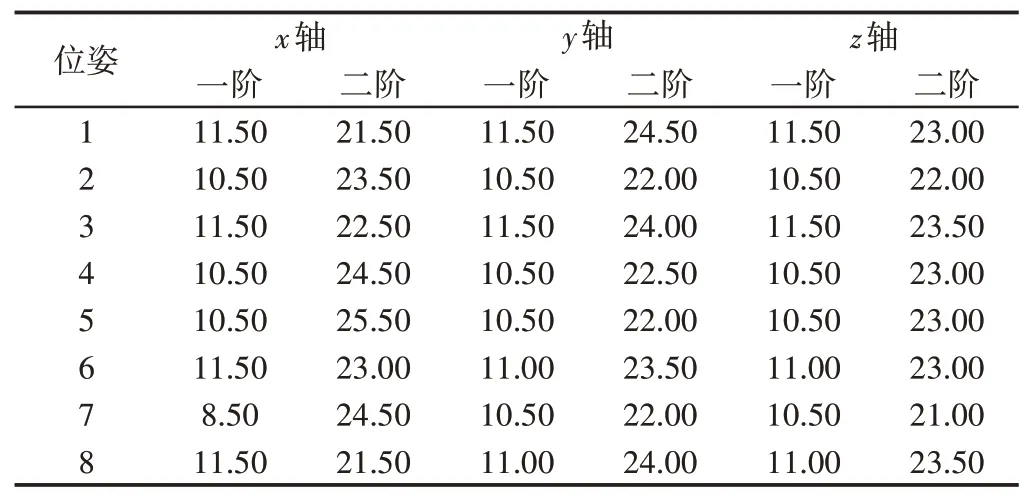
表1 工況一下鋪絲裝置一、二階頻率Tab.1 First and Second Order Frequency of the Placing Device Under Working Condition One

表2 工況二下鋪絲裝置一、二階頻率Tab.2 First and Second Order Frequency of the Placing Device Under Working Condition Two
4.2 振動實(shí)驗(yàn)分析結(jié)果
為了更加直觀的觀察鋪絲裝置的一、二階頻率的變化狀況,將表一和表二數(shù)據(jù)進(jìn)行處理,一二階頻率變化圖,如圖8、圖9所示。

圖9 工況二各階頻率變化圖Fig.9 Frequency Change Diagram of Working Condition Two
從圖8關(guān)機(jī)狀態(tài)下看出,x、y、z軸方向一階頻率基本不變。x軸的二階頻率,位姿點(diǎn)(1~5),頻率增加了4Hz;位姿點(diǎn)(5~8),頻率則降低4Hz;表征了位姿點(diǎn)(1~5)過程中,二階頻率是相對增大的,并在位姿點(diǎn)5處取得二階頻率最大。y軸的二階頻率呈周期性變化,z軸的二階頻率則幾乎不變。
從圖9工作狀態(tài)下看出,x、y、z軸方向一階頻率也基本不變。x軸二階頻率,位姿點(diǎn)(1~5)的變化中提升了4Hz,并在位姿點(diǎn)5處取得最大值25.5Hz,位姿點(diǎn)(5~8)的過程中降低了4Hz;y軸二階頻率,位姿點(diǎn)(1~4)的變化中增加了3.5Hz,其中位姿點(diǎn)4相對位姿點(diǎn)2更是增加了6Hz達(dá)到了28Hz,位姿點(diǎn)(4~8)的變化中降低了4Hz;z軸二階頻率,位姿點(diǎn)(1~4)的變化中增加了5Hz,其中位姿點(diǎn)4相對位姿點(diǎn)2增加了7Hz也達(dá)到了28Hz,但位姿點(diǎn)(4~8)的變換中二階頻率則降低了6Hz。
綜上所述,結(jié)合關(guān)機(jī)和工作狀態(tài)下的鋪絲裝置的一、二階頻率的變化而引起的頻率特性變化情況,將工件擺放位置優(yōu)化在位姿點(diǎn)1~4的變化范圍內(nèi),即(30~82.5)°,從而能夠抑制工作中的振動,提升碳纖維預(yù)浸料窄帶間的相對位置精度及減小鋪放工作范圍。
5 結(jié)論
鋪絲機(jī)器人由于末端執(zhí)行器部分重量過大導(dǎo)致機(jī)器人運(yùn)動過程中容易發(fā)生振動沖擊,導(dǎo)致定位不準(zhǔn)和設(shè)備損傷。借助振動特性分析實(shí)驗(yàn),通過錘擊法對壓輥施加單點(diǎn)激勵,利用三向壓電式加速度傳感器進(jìn)行數(shù)據(jù)采集,實(shí)時傳輸?shù)紻H5927動態(tài)測試分析系統(tǒng)中,獲得了兩種工況八種位姿點(diǎn)狀態(tài)下的一二階頻率。通過對比分析實(shí)驗(yàn)數(shù)據(jù),優(yōu)化了工件擺放位置,由原來的(-90~90)°優(yōu)化到了(30~82.5)°,減小了鋪放工作范圍,保證了纖維窄帶間的鋪放質(zhì)量和鋪放效率。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
