多板主動吸收造波技術實驗研究
2021-06-29 07:24:48白志剛汪曉宇余海濤
水道港口 2021年2期
關鍵詞:實驗
白志剛,吳 哲,馬 暄,汪曉宇,余海濤
(天津大學 建筑工程學院,天津 300354)
波浪實驗是進行海洋水動力物理實驗模型研究的重要組成部分。在進行有結構物的波浪實驗時,波浪會在水池、結構物和造波機械之間多次反射,這種反射現象出現在結構物和造波結構之間的水域,無法通過加設被動吸收裝置的方式消除。解決該問題的辦法是讓造波機在造波的同時進行吸收運動,通過吸收運動抵消反射波浪在造波板上產生的二次反射波,維持造波板到結構物之間行進波的穩定,這種吸收方式被稱為主動吸收。
實驗室造波技術涉及多種行業知識的交叉,是一種結合了水動力理論、機械工程、自動化控制、信息通訊和信號處理的綜合控制技術。國外對造波技術的研究起步較早,經歷了實驗環境從水槽到水池,波浪理論從線性波到非線性波,波浪方向從二維到三維,水池形式從單邊布置到雙邊布置以及圓形布置,造波方式從普通造波到主動吸收造波的發展過程。在國外,1987年Hirakuchi[1]將波高傳感器安裝在造波板上,實現了不規則波的主動吸收造波。1995年Christensen[2]設計了用于方向譜吸收的多板全三維主動吸收系統。在國內,1994年柳淑學[3]研究了分段式造波機的造波特性,2005年柳淑學[4]基于時域控制法和代表頻率法實算法實現不規則波的主動吸收,2012年李俊[5]研究了雙邊多單元造波機的造波特性。2016年楊洪齊[6]基于遞歸重加權最優算法實現了三維不規則波的主動吸收。2014年李宏偉從智能控制的思路出發,分別基于S面控制[7]和廣義預測控制[8]實現了主動吸收造波。目前針對二維水槽主動吸收技術的研究已比較成熟,國內外主動吸收課題主要為針對三維多向水池和非線性波浪造波及吸收[9]。
多板控制的二維主動吸收造波技術是二維水槽和三維水池主動吸收造波技術研究的過渡階段。首先,相對于水槽,水池橫向寬度較大,水動力荷載和扭矩也相應增大,必須采用多組造波板裝置以降低每組裝置的荷載。其次,在水池造波過程中,由于水池中結構物往往為三維結構,即使進行二維造波,反射波往往也夾雜著橫向波浪,僅用一塊造波板無法消除橫向波,而通過采用多板異步運動的主動吸收系統,可以抑制橫波對波浪質量的影響,針對該技術的研究為后續三維造波的研究提供了基礎。
本文基于線性造波理論和基于板上波高信號的主動吸收造波理論,結合TwinCAT3控制平臺和高精度的伺服驅動控制系統,實現了二維規則波和不規則波的主動吸收造波,通過時域控制法的分體控制解決了部分水池橫向不穩定波的問題。
1 理論背景
1.1 規則波造波理論
假定造波板為剛性,水體為理想無旋流體,造波板位移幅值很小,且波浪滿足微幅波條件。造波板造波運動如圖1所示。X軸表示水池造波波面方向,Z軸為造波板的平均位置。水池水深為h。
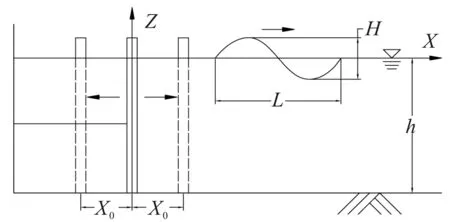
圖1 二維造波示意圖Fig.1 Two dimensional wavemaker diagram
在二維條件下,假設波面的勢函數為φ(x,z,t) ,根據拉普拉斯方程可得
(1)
式中:x與z為波浪的坐標位置;t為時間。
假設造波板的位置時間函數為一正弦函數
X(t)=X0sinωt
(2)
式中:X0為造波板的振幅;ω為造波板運動頻率;t為時間。
在水池底面,水體垂直于底面的運動速度為0。速度邊界條件可以表示為

(3)
設波浪自由表面為η。基于微幅波假定,由伯努利方程與勢函數的性質,可得
(4)
(5)
式中:g為重力加速度。
在造波板處,水體水平運動速度等于造波板速度
(6)
根據式(2)~(6)可以求解造波板運動產生的波面方程
(7)
η為造波板運動產生的波面,c0、cn、k、kn通過式(3) ~(6)求解。
ω2=gktanhk0h
(8)
ω2=-gkntanhknh
(9)
(10)
(11)
式中:第一項是穩定的行進波項,記為η0,1;第二項在造波板面位置有一定的幅度,然而由于指數系數的存在,隨波浪傳播一段距離后逐漸消失,稱為非傳播模態項,記為η0,2。式(7)表示造波板運動與造波板上波浪波高的關系。c0、cn統稱為水動力傳遞系數,代表了造波板位移和波高的幅值響應關系。當采用非封閉式造波板時,板前后存在水體交換,理想水動力傳遞系數與實際水池的傳遞系數有差別,在開始主動吸收造波之前理應通過實驗驗證其各個工況下的值,如果偏差較大,先對該傳遞系數進行修正[10]。式(2)與式(7)對比可以看出,波高信號與造波板位移信號存在90°的相位差。
1.2 規則波吸收理論
基于板運動的疊加性和微幅波的疊加性,讓板在造波運動X0維持行進波的同時,疊加一個吸收運動X′=Xasin(ωt+φ)用來抵消二次反射波。φ表示該運動與造波運動的相位差。修正后的板運動方程為
X=X0sinωt+Xasin(ωt+φ)
(12)
理想狀態下造波板上的波面η可以視為以下波浪的疊加
η=η0,1+ηa,1+η0,2+ηa,2+ηr+ηrr
(13)
式中:ηa,1和ηa,2分別為板的吸收運動產生的行進波項和非傳播模態項;ηr為一次反射波;ηrr為二次反射波。假設板的二次反射率為krr,二次反射波和板吸收運動產生的行進波項相抵消,有
ηa=-ηrr,ηrr=krrηr
(14)
行進波項的和可以寫成如下形式
(15)
非傳播模態項的和可以寫成如下形式
(16)
式(13)左右同時加ηp,聯立式(14) ~(16) ,化簡后得到造波板的運動微分方程為
(17)
式(17)右側η與X(t)均可以通過傳感器反饋得到,krr預設為1,其他各量均已求解,通過該方程即可實現造波板的運動控制步循環。

(18)
式中:i表示沿y方向的傳感器編號。通過這種方式可以維持板群整體的穩定性。
1.3 不規則波造波理論

(19)
1.4 不規則波吸收理論
由于不規則波很難得到每個頻率下波分量具體的實測值,對不規則波使用代表頻率加權法,對每個頻率的波考慮其能量在譜總能量的占比,加權計算其波高,則造波板運動與實測波高之間的關系如式(20)所示。λi的計算公式如式(21)所示。
(20)
(21)
2 系統結構與實驗布置
2.1 部件結構
吸收式造波機系統分為造波機械結構和運動控制系統兩部分。造波機械結構由推板、運動軌道、滑塊、同步帶、減速機組成;運動控制系統由上位機、運動控制器、伺服驅動器、伺服電機、限位傳感器和波高傳感器組成。本設備運動控制器型號為Beckhoff CX2030,伺服驅動器型號為ABB MotiFlex-e180,伺服電機額定功率4 400 w,額定轉速1 500 r/min。造波機采用水平推板結構,板寬0.5 m。相比搖板結構,推板運動幅值更小,能更有效率地利用有限沖程,更適用于小水深造波[12]。經同步帶和減速機傳動后,電機額定轉速對應板移速1.2 m/s。
2.2 多板控制方式與系統
主動吸收式造波需要通過板前波高傳感器的讀數實時地調整造波板的運動,故造波控制系統需要具備良好的實時性、穩定性和抗干擾性。相對于單板系統,多板水池需要的造波板和傳感器數目更多,控制算法變得復雜,處理器要在一個PLC掃描周期內進行更多計算,同時要求數據通訊有更好的實時性和穩定性。
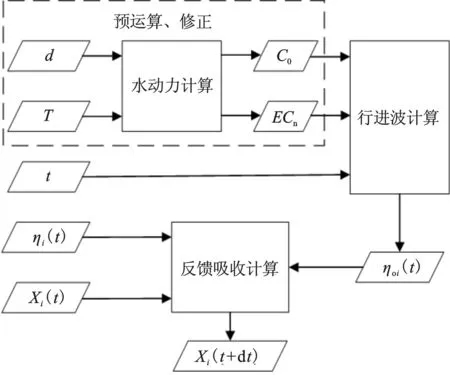
注:i為造波板序號。圖2 Simulink-Module程序步循環流程圖Fig.2 Simulink-Module Program step cycle flow chart
八個電容式波高傳感器固定在八塊造波板的迎水面正中央,控制器通過IO模塊讀取傳器讀取波高的模擬量信號,用于主動吸收的計算。造波機造波、吸收過程的運動計算通過Simulink模塊完成[13]。 模塊每個掃描周期的工作流程如圖2所示。造波前,先通過水深和周期計算水動力傳遞系數,對于規則波,水動力傳遞系數是固定的數,而對于不規則波,輸入的周期為使用波譜的特征周期,傳遞系數是隨頻率變化的數組。在主動吸收實驗之前,先以八根傳感器的平均波高對水動力傳遞系數進行率定修正。預運算和修正完成后造波板移動至造波運動的起始位置,開始主動吸收造波。PLC每個掃描周期獲得八個傳感器的波高信號,并且通過伺服驅動器的編碼器線獲得八塊造波板的位置信號,將其做為輸入量調用模塊,輸出八塊板的位移信號。運動控制器將運動信號下發給伺服驅動器,伺服驅動器控制伺服電機轉動,通過減速傳動裝置帶動造波板運動。造波板造出的波一部分用于產生目標行進波,一部分用來抵消二次反射波。
在本系統中,運動控制器發出的控制信號與軸運動的延遲時間為4 ms,八塊造波板之間的同步時間偏差小于1 ms。本文使用的PLC掃描周期為1 ms,Simulink的計算也在一個PLC的掃描周期內完成。波浪信號的采樣間隔為1 ms,與控制器信號反饋間隔相匹配,采樣延遲為30 ms。系統的整體延遲為34 ms,主要受制于傳感器采樣延遲。主動吸收控制系統如圖3 所示。
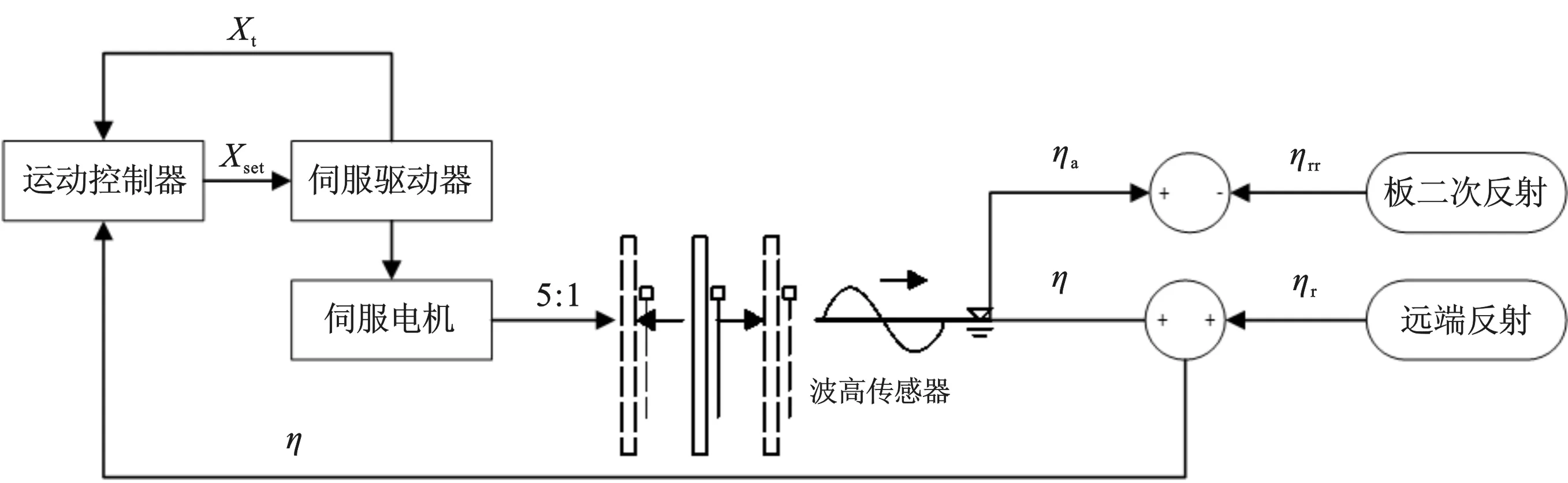
圖3 主動吸收控制系統示意圖Fig.3 Schematic diagram of active absorption control system
2.3 水池系統與布置
本實驗在天津大學水利工程仿真與安全國家重點實驗室中進行。水池寬4 m、長17 m,最大深度1.5 m,如圖4所示。造波板與水池長度方向垂直。造波機背面布置盲溝消波箱,防止板后波浪濺出水池;水池末端整體為混凝土直立墻,為體現不規則反射面給波浪場帶來的影響以及驗證多板系統的吸收效果,在直立墻左端加一寬20 cm的45°三角直立面,以形成明顯的斜向反射。
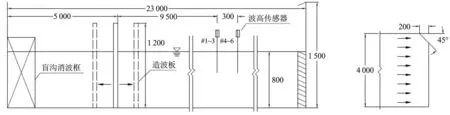
圖4 水池布置側視圖與末端俯視圖(單位:mm)Fig.4 Side view of basin layout
實驗設計水深0.8 m,最大波高0.09 m,近似滿足微幅波條件。由于末端三角的原因,波浪的橫向差異不可忽略,故應在寬度方向上布置一定數量的傳感器,通過同一排傳感器采集到的波面差異評估水槽中的橫向波大小。1~3號傳感器布置在距離造波板9.5 m處,4~6號傳感器布置在距離造波板9.8 m處,沿X方向兩根傳感器為一組,進行兩點法的計算。
在線性波假定的基礎上設計波浪分析算法。對于規則波,通過入反射分離得到行進波波形,將行進波與理論值對比,得到造波板的消波效果。對于不規則波,在分離后通過對水槽中的波浪進行頻譜變換,得到實際行進波譜型與理論譜型的對比,分析得到造波板的消波效果。
在主動吸收造波前需要先驗證行進波傳遞系數的正確性。對于多板的水池造波系統,水池中央和側面的傳遞系數實際上存在差異,因此水池中傳感器的平均波高作為修正傳遞系數的基準。
3 實驗結果及分析
3.1 規則波實驗結果及分析
以H=0.09 m、T=1.25 s的工況為例,進行非主動吸收和主動吸收規則波造波實驗,造波時間300 s。使三對傳感器組分別進行入反射分離,得到兩種造波方式下1~3號傳感器位置沿X軸方向傳播的前進波波面如圖5所示。水池中前進波包括造波機運動產生的波,與推波板面產生的二次反射波。由于二次反射波的存在,非主動吸收造波的前進波波面隨時間不斷變化,無法保持穩定。此外,三個位置傳感器組檢測到的行進波差異較大,這說明水池中的反射波存在橫波成分。相比之下主動吸收造波前進波面長時間穩定保持在目標波高附近,不僅整體消除了二次反射波,而且在一定程度上消除了行進波橫向差異。
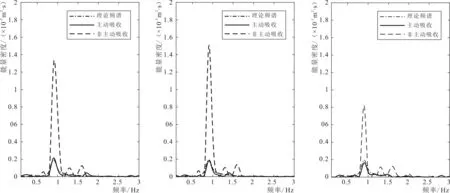
對理論行進波面、主動吸收實測行進波面和非主動吸收實測行進波面進行快速傅里葉變換,得到三個位置該方向波浪的波高頻譜圖如圖6所示,橫坐標為頻率,縱坐標為該頻率下波浪的振幅(即半波高)。非主動吸收的行進波面出現了多個頻峰,振幅衰弱嚴重,而主動吸收的行進波面頻率很好地保持在設定頻率上。
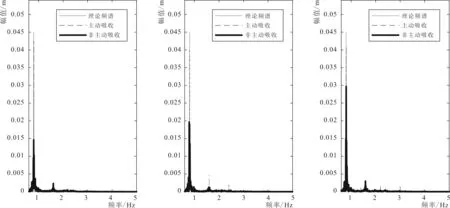
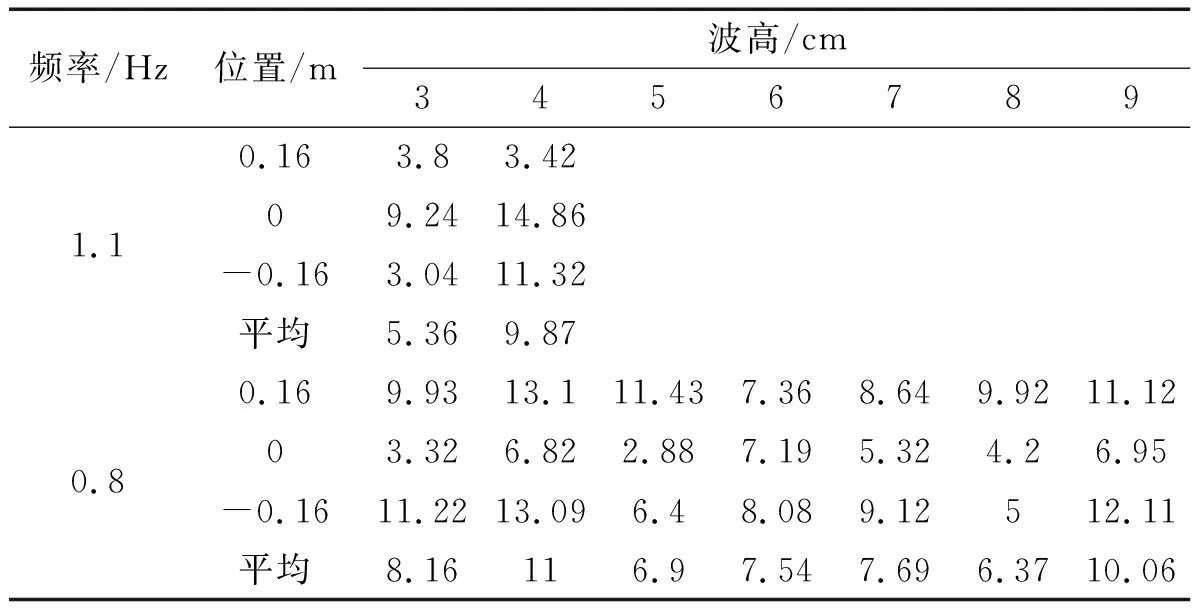
表1 規則波主動吸收式造波振幅偏差率
3.2 不規則波實驗結果及分析
不規則波造波實驗使用Jonswap譜,輸入的造波參數為譜峰因子γ、三分之一大波H1/3和譜峰周期Tm。因為不規則波非主動吸收造波的波面由各成分波隨機疊加,在高頻、大波高情況下易發生破碎,故以較低波高的工況為例說明主動吸收的效果,以γ=3.3、H1/3=0.03 m、Tm=1.11 s工況進行非主動吸收和主動吸收不規則波造波,造波時間為120 s。對于不規則波數據的處理方法不同于規則波,從能量角度出發計算波浪的偏差率。兩種造波方式行進波的能量譜對比如圖7。在多次反射后,非主動吸收波浪不斷疊加,行進波能量已遠超目標譜,造波時間超過120 s后部分工況會出現破碎波浪。從三組傳感器波譜圖對比,可以看出在經過120 s的造波過程后,橫向各位置的波面成分出現很大差異。主動吸收實驗下各傳感器位置的能量譜雖然形狀與幅度基本與目標譜一致,保持了波面的穩定。
對于不規則波,同樣計算行進波振幅偏差率,將各工況三組傳感器的結果平均后如表2所示。實驗結果表明在低頻情況下不規則波主動吸收的行進波振幅偏差率整體分布在15%以內。
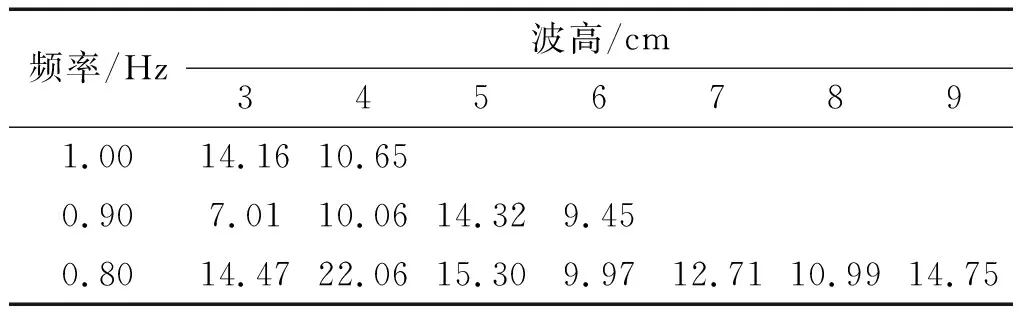
表2 不規則波主動吸收式造波振幅偏差率Tab.2 Energy deviation rate of irregular wave active absorption wavemaker %
3.3 多板造波水池與單板造波水池對比實驗結果及分析
在非主動吸收造波過程中,觀測到了有橫向波的存在,橫波在傳播過程中出現,幅值隨時間發育,長時間造波后橫波在池中反復反射,嚴重影響了波浪質量。在實驗中發現橫向波的發育情況也與波浪周期有關。對于該20 m長水池,進行短周期波主動吸收造波時,橫向差異會在100 s內明顯發育,而對于超過2 s的長周期波浪則可以維持超過300 s的穩定主動吸收造波時間。
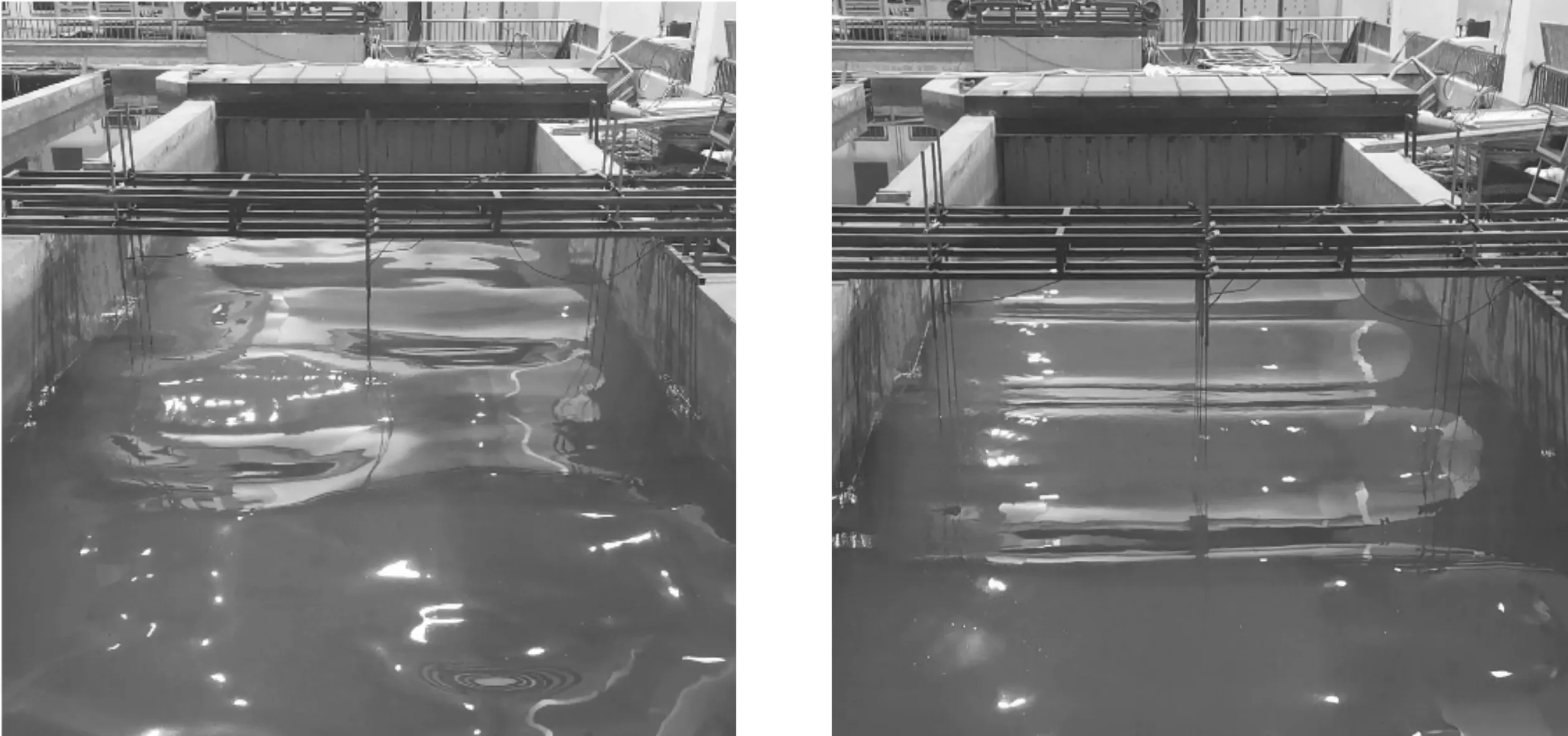
8-a 八塊板同步運動 8-b 八塊板分體運動圖8 兩種方式主動吸收造波300 s后波面對比圖Fig.8 Comparison of wave surface after 300 s by two active absorption modes
對于窄水槽,這種橫波情況很難解決,只能通過限制工況的方式避免橫波出現。但是對于水池,寬度方向上各塊造波板可以獨立運動,通過板之間進行有相位差的錯位運動,可以在水池中抵消部分橫波,限制其發育,維持穩定波場。從根本解決該問題的方法是采用三維造波。基于本次研究從二維到三維的過渡性質,在采用二維時域控制法的同時,將八塊板的信號輸入和位置輸出各自獨立,八塊板以自身板上波高和位置進行反饋計算,嘗試解決部分橫向差異問題。
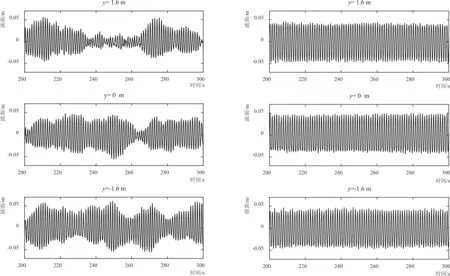
為驗證多板異步運動的效果,以設定波高0.09 m、周期1.25 s工況為例,先將板的分體控制關閉,八塊板同步運動,僅以第五塊板的波高傳感器做為控制信號進行主動吸收造波;再采用多傳感器輸入、多板分體運動的方式在相同工況下造波。拍攝兩種控制方式下300 s后水池情況如圖8所示。
將兩組工況數據進行入反射分離得到行進波波面如圖9所示,能更明顯地看出分體運動對橫向差異的抑制效果。圖1中在八塊板同步整體控制的情況下,前100s波面維持在目標波面附近,但200 s后橫向波發育明顯,波浪非常不穩定。而開啟分體控制后,各個位置的波高都穩定在目標波高附近。實驗結果表明單板控制的水池造波會出現嚴重的橫波干擾,而多板控制方法不僅能消除二次反射波,而且通過板的異步運動克服了部分橫向波的影響,有效地解決了部分工況下橫向波浪縮短有效造波時間的問題。

4 結論
本文基于時域控制法與代表頻率法,設計了應用于二維水池的多板主動吸收造波控制系統。通過物理模型實驗對比驗證,系統對于水池規則波二次反射波的吸收效果明顯,開啟主動吸收造波功能時,二維規則波的振幅偏差率僅部分工況局部位置超過15%,各工況平均振幅偏差率在10%以內;二維不規則波的振幅偏差率僅部分工況超過20%,各工況平均振幅偏差率在15%以內,達到了主動吸收造波的目的。
本文論證了應用于水池的造波機與水槽造波機設計上的本質區別。即使進行二維造波,在有一定寬度的水池中也會出現橫向波,嚴重影響造波質量,而多傳感器采集、多板造波的方式可以在一定程度上限制橫向波浪的發育。
規則波和不規則波實驗結果中,都出現了主動吸收實際波譜峰值低于目標波譜的問題。這是由于水池具有一定寬度,存在三維特性,橫向寬度上各個造波板的水動力傳遞系數各不相同。通過率定水動力傳遞系數可以在一定程度上解決部分位置的波高擬合問題,更根本的解決方法是對三維水池造波的研究構建以及實施。本文為后續三維主動吸收的研究鋪墊了重要基礎。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
