半潛駁穩性現場快速評估方法研究
2021-06-30 00:26:16劉梅梅包勝利于立偉于通順
水道港口 2021年2期
劉梅梅,包勝利,于立偉,王 洋,于通順
(1.中交四航工程研究院有限公司,廣州 510230;2.中交天航港灣建設工程有限公司,天津 300450;3.中國海洋大學 工程學院,青島 266100;4.交通運輸部天津水運工程科學研究所,天津 300456)
隨著我國近岸深水岸線的逐步減少以及船舶的大型化趨勢,港口碼頭的建設由近海逐漸延伸到外海,趨向大型深水泊位方向發展,與之相適應的沉箱結構也逐漸向大型化發展。大型沉箱通常在預制廠預制后通過半潛駁運至施工現場進行沉放安裝。為滿足大型沉箱水上運輸安裝的要求,各施工公司先后建造了多艘大型半潛駁,包括5 500 t的“四航南海號”、8 000 t的“四航廣州號”、10 000 t的“三航工5”及10 000 t的“半潛駁11號”等。
半潛駁作為一種海上大型結構物運輸的特種工程船舶,既可以搭岸裝載,也可以進行半下潛后結構物漂浮卸駁。半潛駁上浮、下潛過程中水線面面積急劇變化,其整體穩性及施工作業安全將受到嚴峻的考驗。近年來,隨著工程規模的擴大,預制構件尺寸也隨之增大,對駁船運輸、裝卸過程中的穩性要求也越來越高。同時,由于半潛駁每次裝載的貨物不盡相同,每次裝載前都要對其完整穩性進行核算,目前尚未形成一套科學高效的施工現場穩性快速評估技術。而出于作業效率和經營成本考慮,如何根據半潛駁和載重件的關鍵技術參數進行施工現場快速穩性評估,對于半潛駁施工過程的安全和效率具有重要意義。
國內外專家學者對各類船舶穩性開展了大量有價值的研究。Moore C等[1]探討了貨艙及壓載水艙的裝載情況,開展了雙體油船的穩性計算研究;Mata-Alvarez-Santullano F等[2]以2004年和2007年之間發生傾覆的尺寸相近的漁船為研究對象,開展了船舶穩定性、安全性和操縱性之間關系的研究,明確了船舶安全的重要指標;Cleary等[3]探究了大型帆船的完整穩性,提出了增大穩性的具體措施。目前行業內有較成熟的軟件例如NAPA[4]、CATIA[5]等可用于船舶穩性的計算,國內諸多船舶科研設計單位[6-8]針對船舶穩性計算的軟件開發也做了大量工作,其準確性在一定范圍內滿足要求。陳偉等[9]以一艘改裝半潛駁船為研究對象,對半潛駁船的完整穩性進行了初步研究,揭示了半潛駁船的穩性特點,探討了半潛駁船作業的最差穩性和貨物對穩性的貢獻問題。謝偉明等[10]針對各船級社關于半潛駁船穩性標準各不相同的情況,對各穩性衡準指標進行分析比較,并利用已有的航次工況和經驗數據,得出適合半潛駁船運輸行業的校核標準。張泉[11]以5萬t級半潛船作為研究對象,對相關完整穩性問題進行了重點研究,并依據IMO的穩性氣象衡準推算出半潛船在正常航行能夠抵抗的風級。目前半潛駁施工穩性評估大多是施工前采用NAPA或Compass等商業軟件依據預定的施工工況開展事先評估,現場再依據事先評估結果進行施工。然而施工中如果預定施工工況發生臨時改變,目前采用的事先評估方法將無法適用。由此可見目前施工前的穩性校核方法在施工現場快速評估中存在不足,因此需開發有別于常規方法的現場快速評估方法。
本研究依據NURBS曲面的濕表面壓力積分算法提出了半潛駁穩性現場快速評估方法,并基于Fortran語言開發了半潛駁穩性評估程序OSTAB(Ocean university of China STABility assessment code)。以“四航南海號”為研究對象,開展了其施工作業過程中的橫向穩性評估,并將計算結果與裝載計算書的數據進行對比,以驗證所開發程序的準確性與有效性。
1 半潛駁穩性評估方法與程序開發
半潛駁穩性主要通過初穩性高度和靜穩性力臂來評價。因此本部分的核心是計算不同裝載工況下半潛駁初穩性高度和靜穩性力臂。本文初穩性高度和靜穩性力臂都是通過橫搖回復力矩來間接計算,如式(14)所示,所以首先需要通過式(10)~(13)來計算不同船舶浮態下的橫搖回復力矩,同時為了進行靜水壓力積分求回復力矩還需要由式(1)~(8)表達的確切船體NURBS曲面,具體方法和程序開發介紹如下。
1.1 船體與載重件NURBS曲面網格構建方法
采用非均勻有理B樣條進行船體和載重件表面網格的構造,非均勻有理B樣條通常簡稱為NURBS(Non-Uniform Rational B-Spline),是利用計算機處理幾何信息時用于形狀的表示、設計和數據交換的工業標準,許多國際標準如IGES、STEP都把NURBS作為幾何設計的一個強有力的工具。
對于一張在u方向p次、v方向q次的NURBS曲面具有以下形式的雙變量分段有理矢值函數
(1)
其中{Pij}為曲面的控制點坐標;wij為權因子;Nip(u)、Njq(u)分別是定義在節點矢量U和V上的非有理B樣條基函數。
引入分段有理基函數
(2)
則有
(3)

本研究中采用基于船體型線建立的船體NURBS曲面,并將曲面導出為IGES格式。船體曲面由N個在u、v方向均為三次NURBS曲面構成。其節點矢量為
U=V={0,0,0,0,1,1,1,1}
(4)
其中,各次基函數間的關系為
(5)
就此得到了基函數,取權值wij,則可按式(1)計算得到曲面S(u,v)。
引入NURBS曲面的齊次坐標表達
(6)


(7)

(8)
因此,可以根據式(7)求得曲面的一階偏導矢Su(u,v)和Sv(u,v),則曲面上各點的法向量為
ni(u,v)=Su(u,v)×Sv(u,v)
(9)
1.2 船體濕表面壓力積分與網格坐標變換方法

(10)

(11)
式中:瞬時吃水d(xi,t)由下式計算
(12)
式中:上標h和e表示參考坐標系O-XhYhZh和大地固定坐標系Oe-XeYeZe的矢量,各坐標系間的關系如圖1所示。[x,y,z,φ,θ,ψ]T代表船體六自由度運動,在任意船舶浮態下,兩坐標系間的轉換關系定義為

圖1 各坐標系關系示意圖Fig.1 Relationship between different coordinate systems

(13)
1.3 半潛駁橫向穩性現場快速評估程序開發
基于濕表面壓力積分算法開展半潛駁靜水力表、浮態計算與穩性評估。主要包括了靜水力表計算、載重表計算、浮態計算、初穩性高度和靜穩性力臂計算、規范校核四部分。靜水力表計算中,首先依據不同吃水和縱傾角,采用網格坐標變換方法對船體網格進行坐標變換;然后,在變換得到的新網格上通過濕表面壓力積分算法計算得到對應吃水和縱傾角下的排水量、方形系數、濕表面面積等靜水力信息。載重表計算中,依據輸入的不同裝載工況下各艙室的水位信息在各艙室艙容表中進行插值得到各艙室重量、重心和液面慣性矩信息;然后,將空船重量重心、載重件重量重心和各艙室重量重心與液面慣性矩信息進行疊加,得到對應裝載工況下的船舶載重表。浮態計算中,依據載重表中的重量重心以及濕表面壓力積分算法得到的浮力浮心來確定船舶在對應裝載工況下的浮態(包括縱傾角、橫傾角、首尾吃水、平均吃水等)。
初穩性高度和靜穩性力臂計算中,本文采用的是通過回復力來間接計算的方法。具體在計算初穩性高度時使船舶產生小角度的橫傾角θ(本程序中選取為0.1°),如圖2-a所示,此時采用式(10)計算船舶橫搖靜水回復力矩F4res(θ),根據圖2-a所示有F4res(θ)=△gGMtanθ,由此可以通過式(14)來間接計算初穩性高度,即GM值。在計算不同橫傾角α下的靜穩性力臂,即GZ值時,使船舶產生給定的傾角α,如圖2-b所示,此時采用式(10)計算船舶橫搖靜水回復力矩F4res(α),根據圖2-b所示有回復力矩F4res(α)=△gGZ,由此可以通過式(14)來間接計算GZ(α)。

在計算得到的浮態下,按式(14)計算得到初穩性高度和不同橫傾角α下的靜穩性力臂。
(14)
式中:△為排水量,F4res(0.1°)和F4res(α)為對應橫傾角0.1°和α下的橫搖靜水回復力矩。
此外,由于液艙內自由液面的存在,船舶的穩性會被削弱,因此初穩性高度還需要進行如下式自由液面修正
GMcorr=ρIT/△
GM0=GM-GMcorr
(15)
式中:ρ為液貨的密度,t/m3;IT為液艙自由液面慣性矩,m4;GM0為修正后的初穩性高度。
基于Fortran語言開發了半潛駁穩性評估程序OSTAB(Ocean university of China STABility assessment code)進行半潛駁在拖航和上浮/下潛過程的穩性評估。程序以半潛駁的船體表面文件、半潛駁分艙表與各艙室艙容表和載重件參數等為輸入,采用基于NURBS曲面的濕表面算法快速計算得到不同載重件參數和任意壓載艙水位下的半潛駁排水量、浮態、初穩性高和靜穩性力臂曲線等穩性評估信息,程序的實現流程如圖3所示。程序完成一個工況所有穩性評估計算的時長在30 s以內。

圖3 OSTAB程序計算流程圖Fig.3 Calculation flow chart of OSTAB
2 穩性評估計算準確性驗證
為驗證以上程序的準確性,以5 500 t半潛駁船“四航南海號”為對象開展靜水力計算,并與“四航南海號”的裝載計算書進行對比。“四航南海號”半潛駁主尺度如表1所示。根據“四航南海號”的參數建立船體曲面及分艙模型如圖4、圖5所示。將船體曲面和各液艙的艙容、重心位置和自由液面慣性矩隨液面距艙底高度變化信息,作為后續穩性計算程序的輸入。

圖5 “四航南海號”分艙模型Fig.5 Sub-cabin model of "Sihang Nanhai"

表1 “四航南海號”參數Tab.1 Parameters of "Sihang Nanhai"

將靜水力計算結果與裝載計算書數據進行對比,如表2所示。可以看出,濕表面壓力積分程序結果包括排水體積、排水量和水線面積,與裝載計算書差異均小于0.5%,因此可認為本程序具有較好的準確性。

表2 靜水力計算結果與裝載計算書數據對比Tab.2 Comparison of hydrostatic calculation results and loading calculation book
3 半潛駁穩性快速評估
本節中采用前述的OSTAB穩性評估程序進行半潛駁的橫向穩性評估,穩性評估中選擇了載沉箱半潛駁拖航和下潛/上浮兩種狀態,沉箱選取了三種不同的典型尺寸,具體的工況設置如表3、表4所示,各沉箱的規格如表5所示。

表3 拖航狀態工況Tab.3 Conditions of towing

表4 下潛/上浮工況Tab.4 Conditions of diving/floating

表5 沉箱參數Tab.5 Parameters of caisson
3.1 浮態計算結果
基于OSTAB程序針對拖航狀態下的浮態計算結果如表6所示。將各工況下的排水量與裝載計算書數據比較如圖6所示,可以看出OSTAB計算結果與裝載計算書結果相比,誤差均在0.01%范圍內,同樣驗證了OSTAB程序的準確可靠。

表6 拖航狀態下OSTAB程序浮態計算結果Tab.6 Results of floating condition using OSTAB when towing

圖6 拖航狀態下OSTAB程序浮態計算結果與裝載計算書對比Fig.6 Comparison of floating condition calculation results using OSTAB and loading calculation book
基于OSTAB程序針對下潛/上浮狀態下的浮態計算結果如表7所示。

表7 下潛/上浮狀態下OSTAB程序浮態計算結果Tab.7 Results of floating condition using OSTAB when diving/floating

表8 拖航狀態下OSTAB程序初穩性高度計算結果Tab.8 Results of initial metacentric height using OSTAB when towing
3.2 初穩性高度和靜穩性力臂計算結果
基于OSTAB程序針對拖航狀態及下潛/上浮狀態下的初穩性高度計算結果分別如表8、表9所示。從表中初穩性高度結果可以看出,在拖航狀態下,由于船舶水線面的面積和慣性矩大,橫穩心高大,對應的初穩性高度也大;而在下潛/上浮狀態下,在半潛駁主甲板淹沒前后,由于水線面變化劇烈,造成初穩性高度變化很大,如工況LOAD02和LOAD04兩個工況的對比,LOAD02工況甲板未淹沒,初穩性高度為12.83 m,而LOAD4工況甲板完全淹沒,初穩性高度下降到1.08 m,類似的,從工況LOAD12到LOAD13、從工況LOAD19到LOAD22、從工況LOAD28到LOAD31都出現了初穩性高度急劇下降的現象。由此可見,在半潛駁主甲板淹沒前后半潛駁的穩性最為薄弱。

表9 下潛/上浮狀態下OSTAB程序初穩性高度計算結果Tab.9 Results of initial metacentric height using OSTAB when diving/floating
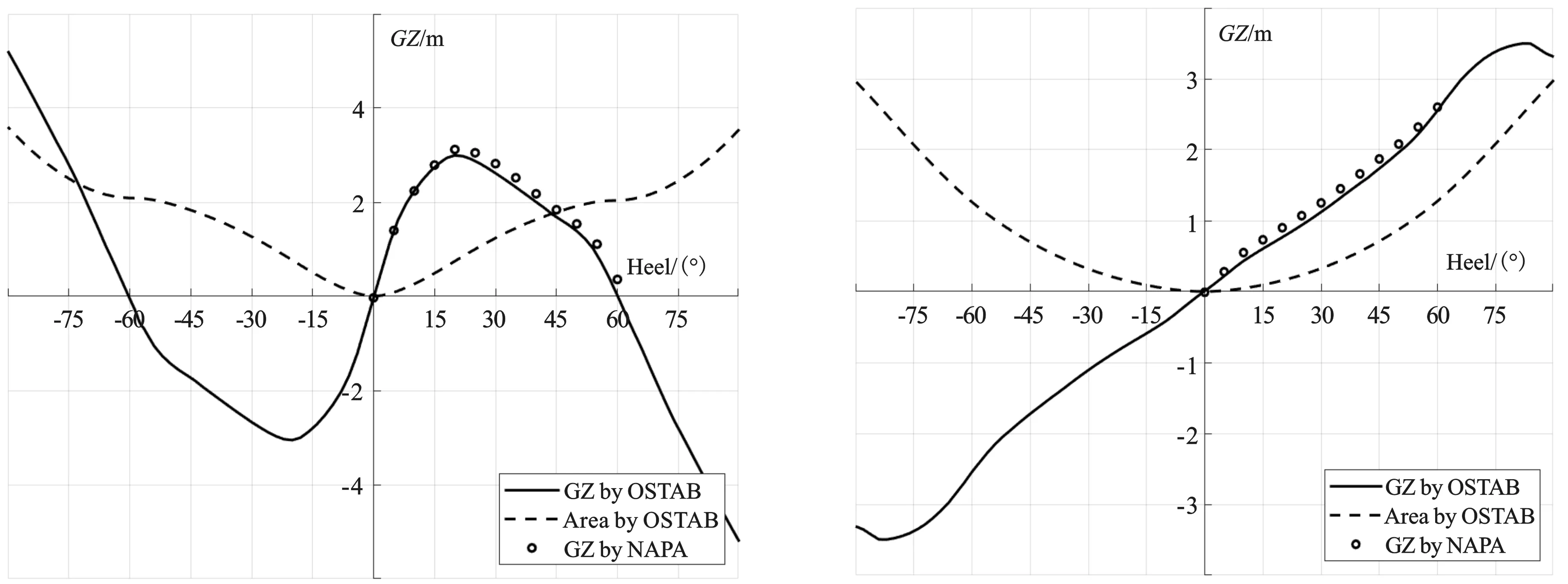
采用OSTAB程序對“四航南海號”靜穩性力臂曲線和靜穩性力臂曲線所圍面積進行了計算,選取拖航狀態及下潛/上浮狀態下典型工況LOAD46、LOAD08、LOAD12和LOAD13如圖7所示,其中實線和虛線分別為OSTAB程序計算的靜穩性力臂曲線和靜穩性力臂曲線圍成的面積,空心圓點為裝載計算書中Napa計算的靜穩性力臂曲線。從圖中可以看出,OSTAB程序的靜穩性力臂曲線計算結果與裝載計算結果符合很好。從LOAD12和LOAD13工況下靜穩性力臂曲線的對比結果可以看出,盡管兩工況初穩性高度相差很大,但兩者的靜穩性力臂曲線相差并不大,即兩者的大傾角穩性較為接近。總體上,從靜穩性力臂曲線可以看出,半潛駁有著較為優良的大傾角穩性。

4 結論
(1)基于Fortran程序開發了沉箱施工半潛駁穩性評估程序,不同于傳統施工前穩性評估方法,實現了船舶橫向穩性的施工現場快速評估。
(2)程序中基于NURBS曲面的瞬時濕表面壓力積分方法準確建立船體曲面,提高了計算的準確性。
(3)半潛駁在主甲板淹沒前后,由于水線面變化劇烈,造成初穩性高變化很大,此時半潛駁的穩性最為薄弱。
(4)通過對半潛駁船的穩性計算和與裝載計算書的對比證明本文所提方法在沉箱施工中進行半潛駁穩性現場快速評估的可行性,為后續開發基于現場壓載水艙液位監測開展半潛駁穩性快速評估與施工安全決策提供了基礎技術支撐。
(5)本文進行了半潛駁靜穩性評估方法的研究,為便于復雜工況下半潛駁的施工作業,風、浪、流等海洋環境荷載作用下半潛駁穩性評估及沉箱對船體穩性影響的研究工作需進一步開展。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
人大建設(2019年12期)2019-05-21 02:55:44
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
中國船檢(2017年3期)2017-05-18 11:33:09
環球時報(2017-03-30)2017-03-30 06:44:45
中國衛生(2015年3期)2015-11-19 02:53:32
