基于DSP的采煤機電控系統設計與應用研究
2021-06-29 08:57:40田彥恒
機械管理開發 2021年5期
田彥恒
(潞安化工集團潞寧煤業有限責任公司,山西 忻州 036000)
引言
采煤機作為煤炭采掘過程中的重要設備,其電氣控制過程的自動化程度直接關系著采煤的效率和可靠性[1-2]。目前,服役的采煤機控制系統多采用PLC作為核心控制部件,其在數據處理方面存在運算能力和靈活性均較差的問題[3-5]。DSP控制技術在數據處理過程中具有速度快、精度高的優勢,近年來在控制領域取得了較為廣泛的應用[6]。因此將DSP技術應用于電牽引采煤機電控系統具有很好的前景。
1 采煤機電控系統的分析
目前使用的采煤機從結構和功能角度進行劃分通常包括牽引、截割、破碎、電控和輔助等部分,各部分功能的實現均離不開電控系統。本文就以某型號采煤機電氣控制系統為例對其結構與功能進行分析。該控制系統由主控制器控制并借助液晶顯示器顯示,運用變頻調速和信號傳輸技術將控制指令傳輸至采煤機截割電機、牽引電機、破碎電機和姿態調整電機等,同時由多種采煤機狀態監測傳感器,實現采煤機運行狀態的監測和保護功能。
2 采煤機電控系統總體方案的設計
基于采煤機電控系統分析結果,擬定了基于DSP的電牽引采煤機電控系統總體方案,如圖1所示,該控制系統不僅具有控制和保護的功能,還具有對采煤機遠程監控的功能。

圖1 采煤機控制系統圖
在該電控系統的設計中,采用DSP中央控制單元控制器作為主控模塊,采用DSP的通用I/O接口作為輸入/輸出接口,這種接口具有很好的兼容性,其中輸入的數字量信號包括控制按鈕指令、遙控接收器指令、數字量監測信號等,輸出的數字量信號包括截割電機、搖臂、變頻器等動作信號,通信接口主要涉及RS-232、RS-485、CAN總線等接口,控制信息顯示模塊功能的實現主要通過RS-232總線連接DSP與觸摸屏通信來完成,模擬信號輸入模塊連接各種信號采集傳感器,實現各個傳感器信號的收集功能,遠程監控模塊主要實現DSP控制器與遠程控制主機的信息交換,其通信方式為CAN總線。
3 采煤機電控系統功能模塊的設計
3.1 主控模塊
主控模塊功能實現的核心部件是DSP控制芯片,為了保證功能實現過程的穩定性和可靠性,選擇型號為TMS320C2812的DSP控制芯片作為采煤機的主控制器,簡稱F2812芯片,該芯片生產于美國德州儀器公司并且在工業控制領域得到了較為廣泛的應用。控制系統通過擴展F2812芯片,可很好地實現與設備的對接,并且數據處理速度更快,同時F2812芯片集成了數字信號處理、精簡指令及計算、多種開發工具等,具有很好的功能擴展性。
3.2 接口模塊
接口模塊涉及數字量接口和通信接口兩部分,數字量接口主要完成采煤機截割電機啟停、搖臂升降、牽引電機啟停與加減速等的控制,通信接口涵蓋DSP的所有通信線路,由于F2812自帶兩個串行通信接口,RS-232、RS-485以及CAN總線接口的設計就是靠F2812自帶的兩個串行通信接口和局部控制器完成的,這種通信接口的設計可實現DSP控制器與顯示器、變頻器、遠程主控的通信功能。
由于采煤機控制系統較為復雜,涉及的控制數字量信息較多,根據控制需要,采用CPLD對DSP控制器進行數字量接口的擴展,以實現采煤機各種控制信息的采集與監控。由于CPLD是一種高級復雜可編程邏輯器,在進行DSP接口擴展時不僅能夠減少接口模塊的空間需求,還能提高接口模塊的抗震性能。綜合上述控制功能,選擇型號為EMP240T100C5的CPLD控制器(屬于Altera公司的MAXIⅡ系列芯片)。
數字量接口對抗干擾性能要求較高,所以在與相關外部設備連接之前需要進行光電隔離,此控制系統中選用型號為TLP521-4的光電耦合器件,之后通過配置相應的總線接口電路,實現DSP通信接口與外圍相關設備之間的通信和邏輯關系的變換等功能。
3.3 顯示模塊
顯示模塊主要功能是完成人機交互、實時顯示采煤機的運行狀態、指導操作者作業。狀態顯示通過觸摸屏屏幕實現,為了保障觸摸屏的使用可靠性,選擇型號為GT12的觸摸屏(屬于三菱GOT1000系列)。基于采煤機各項工作參數,進行觸摸屏界面的設計,實現采煤機各個電機、變頻器、DSP控制參數的實時顯示。采用GTDesigner3作為三菱觸摸屏界面的設計軟件,能夠很好地完成采煤機監測界面、運行界面、故障界面和各種提示窗口的設計。監測界面主要顯示采煤機運行狀態參數,運行界面顯示采煤機操作者所需的觀測數據,故障界面用于采煤機故障報錯與提示。
DSP控制器與觸摸屏之間的通信,通過設置Modbus-RTU協議,采用RS-232接口完成,當DSP接收到觸摸屏的命令時,DSP控制器內部程序進入中斷響應,解析命令之后發出控制指令。
3.4 模擬量采集模塊
采煤機運行過程中需要采集的模擬量涉及截割電機的電流和溫度、變壓器溫度、工作面瓦斯氣體的濃度等。采用型號為PT100的溫度傳感器檢測溫度,量程范圍為0~200℃;采用電流互感器對截割電機三相電流進行檢測;采用瓦斯傳感器與瓦斯斷電儀對瓦斯濃度進行檢測,當瓦斯斷電儀報警時,采煤機停止運行。
F2812主控模塊內部自帶16路DAC模塊,分辨率為12位,可同時接收16個模擬量信號,采樣頻率高達12.5 Msps。同時,DSP主控自帶的ADC模塊的輸入電壓為0~3 V,需要首先完成各種傳感器信號的調節,之后進行電壓轉換并輸入DSP控制器中,實現對模擬量信號的采集。
3.5 遠程控制模塊
遠程控制模塊能夠根據采集得到的采煤機運行狀態數據,通過控制系統對數據分析處理,確定采煤機的控制指令,遠程發送至采煤機,控制采煤機按照指令運行。采用Quest3D的虛擬操控系統,完成數據讀取、數據分析、指令發送等遠程控制模塊的功能設計。
DSP主控模塊與遠程主機之間的通信采用CAN總線完成,其F2812自帶eCAN模塊支持的CAN2.0B協議,具備遠程通信功能。在設計時為遠程主控計算機配置CAN-232轉換器,能夠可靠讀取CAN總線信號并轉換成RS232信號,實現對采煤機的遠程控制。
4 DSP程序的設計
DSP主控模塊的程序屬于順序掃描模式,在采煤機運行狀態正常時,掃描數字量輸入模塊,獲取采煤機各個部分的運行狀態,經分析處理輸出接口動作指令,其控制流程如圖2所示。
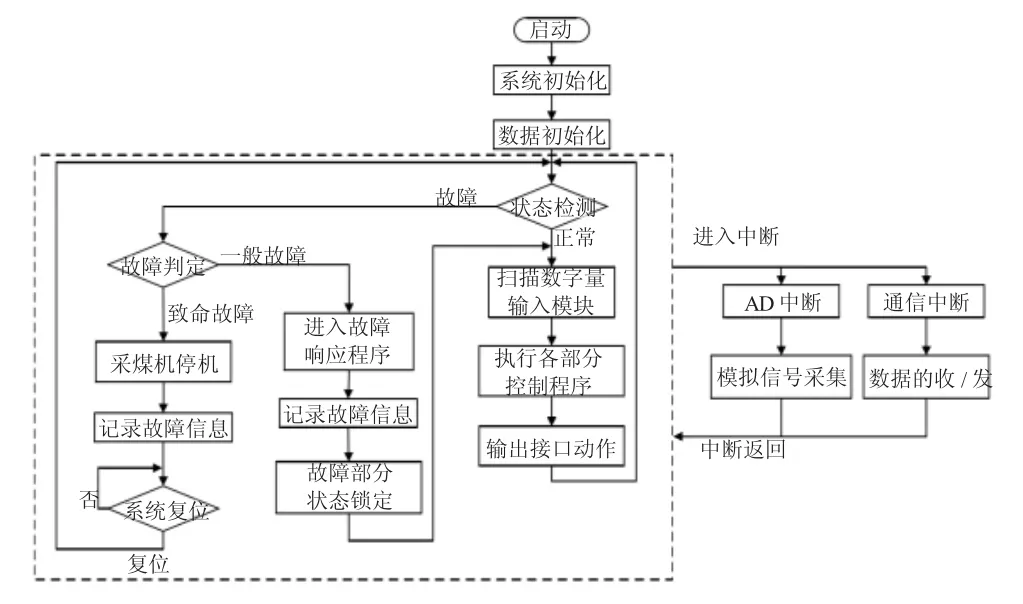
圖2 DSP主控模塊軟件控制流程
采煤機電控系統在檢測得到的運行狀態出現異常時,第一步就是判斷故障的類型,包括致命故障和一般故障兩種。當致命故障出現時如瓦斯濃度超標、截割電機溫度過熱等,必須立即停機,記錄故障時間和信息,鎖定采煤機程序,不允許自動復位,故障排除之后方可重新啟動程序。一般故障是指采煤機某一部分出現故障,不影響其他部分正常工作,僅需采煤機控制系統作出停機響應,顯示故障信息,待排除故障之后狀態顯示正常為止。
5 采煤機電控系統的應用效果評價
為了驗證采煤機電控系統的設計效果,投入使用后進行了為期半年的跟蹤記錄,結果表明,基于DSP技術設計完成的采煤機電控系統運行穩定可靠,能夠滿足采煤機的控制要求,能夠對采集得到的采煤機運行狀態數據進行快速的邏輯分析和處理,給出對應的實時控制指令,相對于原電控系統,該電控系統數據處理能力提升近30%,提高采煤機的利用率近25%,取得了很好的應用效果。
猜你喜歡
防爆電機(2022年1期)2022-02-16 01:14:06
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
河南科技(2014年18期)2014-02-27 14:14:58