基于T-S模型的載貨車輛動態參數滑模控制
2021-06-30 14:13:06孫船斌童寶宏鄭近德
振動與沖擊 2021年12期
孫船斌, 方 琳, 童寶宏, 鄭近德
(1. 安徽工業大學 機械工程學院,安徽 馬鞍山 243032; 2. 低碳與智能車輛研究所,安徽 馬鞍山 243032 3. 特種重載機器人安徽省重點實驗室,安徽 馬鞍山 243032)
由于載貨車輛承載大,滿載質心相對較高且靠后,在急轉過程中載貨車輛更易側傾、過度轉向,相較乘用車輛更容易發生車身失穩,從而導致嚴重的交通事故[1-2]。國內外學者通過研究主動安全技術來提高車輛轉向穩定性,如直接橫擺力矩控制、主動轉向技術、主動半主動懸架技術和集成控制方法等。直接橫擺力矩[3]和主動轉向[4]均是分配輪胎力進行橫擺運動控制,通過控制橫擺角速度以降低車輛側向加速度,間接提高轉向過程側翻穩定性。主動、半主動懸架技術[5]根據車身狀態產生合適的懸架輸出力,直接控制車身側傾運動來改善側翻穩定性。集成控制方法[6-7]則根據整車運動狀態和控制目標,擇優分配主動橫擺力矩和側傾力矩。目前研究多針對乘用車極限工況下的操縱穩定性或側翻穩定性,對載貨車輛極限狀態穩定性研究較少。金輝等[8]利用質心側偏角相軌跡進行極限車速穩定性控制,李紹松等[9]對極限工況下主動前輪轉向汽車進行穩定性控制,陳松等[10]基于主動橫向穩定桿與差動制動聯合控制對車輛防側翻研究,張寶珍等[11]基于主動脈沖后輪轉向進行側翻穩定性仿真與試驗。相較于普通乘用車,載貨車輛極限工況下側翻穩定性對橫擺狀態更加敏感,單一的橫擺控制或側翻控制可能仍會失穩,有必要在極限狀態下對載貨車輛進行橫擺-側傾聯合控制研究。
載貨車輛懸架被設計成具有變剛度的非線性系統以適應質量變化[12-13],緊急轉向中輪胎側偏剛度和懸架剛度、阻尼經常處于非線性區域,小幅度線性假設不再適合。胡延平等[14]針對非線性干擾設計了基于輸出反饋的非線性H∞控制,改善線性控制器的控制效果。李紹松等基于非線性輪胎模型提出一種改進型線性時變模型預測控制,提高極限工況下汽車穩定性。對極限狀態下載貨車輛進行控制時,考慮輪胎與懸架的非線性相互耦合,會帶來很多不確定影響因素。T-S方法通過線性組合來逼近非線性問題,龐輝等[15]采用T-S方法描述懸架參數的不確定性,王立敏等[16]對非線性間歇過程建立T-S模型,結果證明T-S方法與控制方法結合的優勢。
在極限狀態中的載貨車輛,橫擺運動和側傾運動均需要及時控制,對于時變和非線性系統的多目標控制問題,滑模控制方法具有較好的控制效果。在控制橫擺運動的質心側偏角和橫擺角速度時,傳統滑模方法經常將滑模面設計成兩者的線性組合[17-18],在良好附著條件下采用橫擺角速度控制,低附著條件下采用質心側偏角和橫擺角速度組合控制,然而并未關注非線性系統對多目標控制滑模面的穩定性要求,尤其載貨車輛的重心位置更易過度轉向和側翻。
針對載貨車輛極限狀態下的穩定性,本文在非線性工作域內進行主動橫擺和側傾力矩的改進型滑模控制。利用扇形域分別建立非線性懸架和輪胎的T-S模型,結合模糊觀測器獲取懸架和輪胎動態模型參數。考慮橫向偏移載荷對期望橫擺角速度的影響,建立橫擺狀態和側傾狀態滑模面,設計了改進型滑模方法的動態參數,并對控制系統進行Lyapunov穩定性分析。在Trucksim中采用Sine with Dwell轉向輸入模擬載貨車輛極限狀態進行驗證,在不同路面摩擦系數μ下對比傳統滑模控制、無控制工況載貨車輛的轉向過程,分析本文方法的控制性能。
1 側傾橫擺非線性聯合控制模型
載貨車輛橫擺-側傾模型如圖1,車輛轉向過程前進速度vx不變,假設車身側傾中心在轉向過程中不變。載貨車輛橫擺-側傾耦合運動模型如式(1),式(2)為車身的側向慣性力矩。前后輪胎側偏剛度Cf(t)、Cr(t)和懸架側傾剛度kx(t)、阻尼cx(t)均為非線性。文中控制輸入橫擺力矩Uz為直接橫擺力矩,主動側傾力矩Ux由主動懸架輸出。參考載貨車輛分類國家標準[19],以4×2中型載貨車輛為對象,具體模型參數見表1。
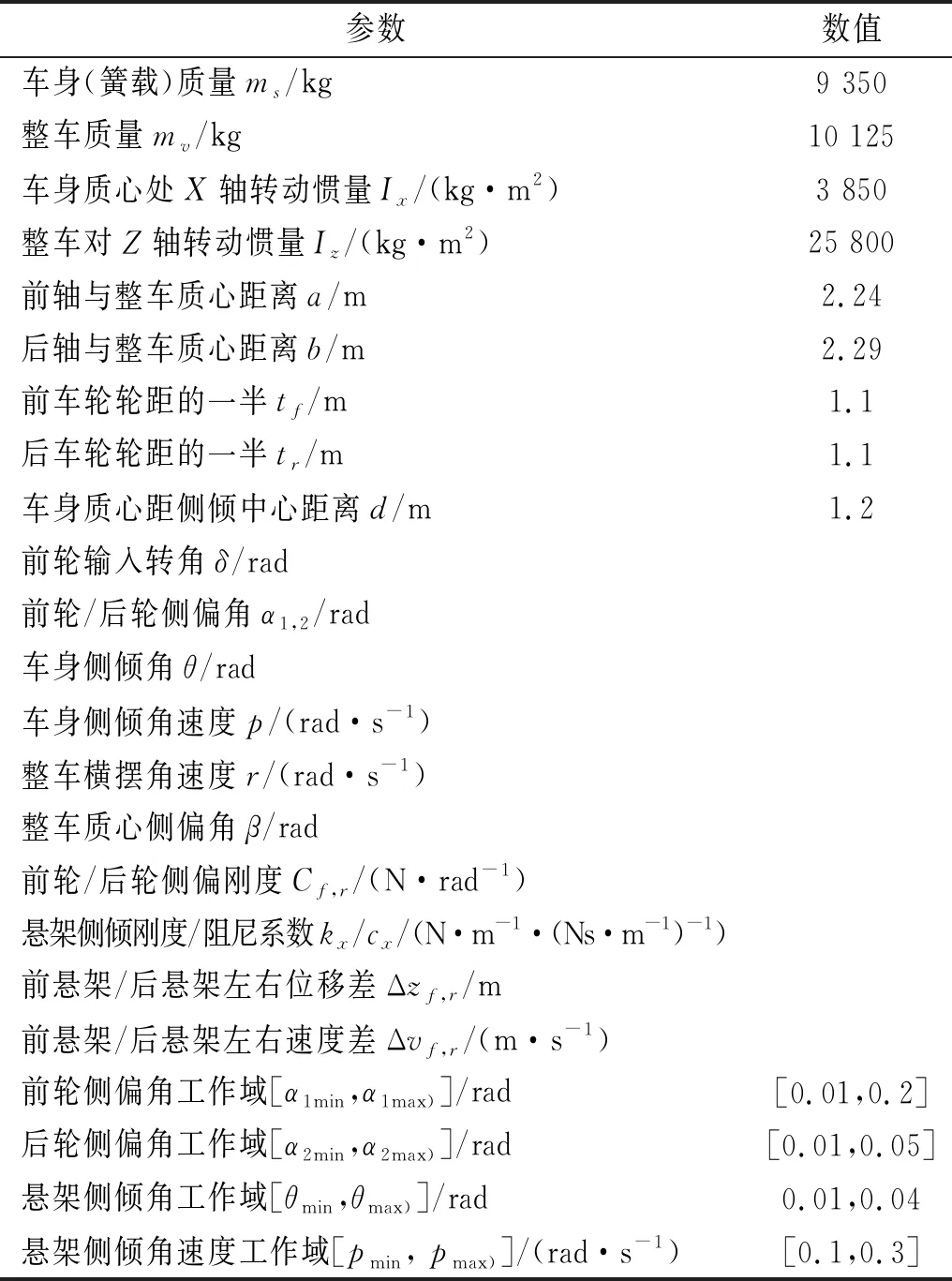
表1 仿真模型主要參數
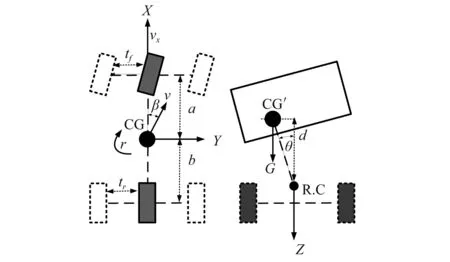
圖1 載貨車輛橫擺-側傾模型
(1)
(2)
2 T-S方法模型參數及其模糊觀測器
2.1 非線性工作域
在式(1)中,輪胎力和懸架力分別是輪胎側偏角和側傾狀態的非線性函數。在正常穩定行駛過程中,輪胎和懸架均可看作處于線性區域,極限狀態會導致車輛狀態往非線性區域變化。需要一個過渡區域,兼顧線性與非線性的平衡,如圖2所示。在此非線性工作域內,輪胎側偏力和懸架輸出力均在扇形域內變化。在此扇形域,輪胎側偏剛度Cf,r、懸架側傾剛度kx和阻尼系數cx均在一定范圍內連續變化。在輪胎力與懸架力的扇形域,通過T-S方法表達非線性輪胎和懸架的動態模型參數。
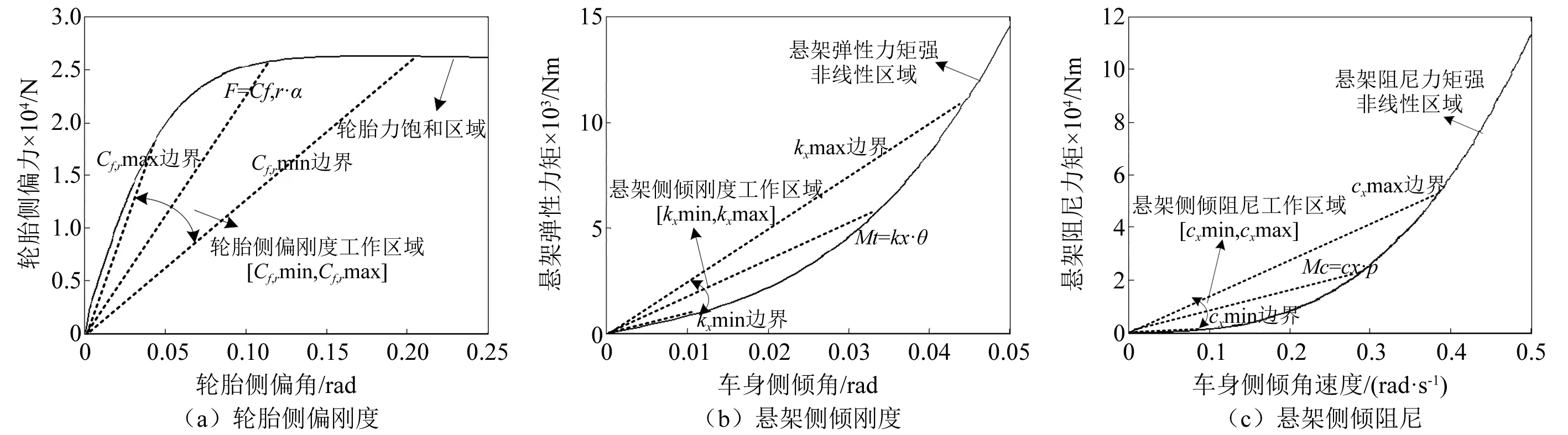
圖2 輪胎與懸架的非線性工作域
2.2 T-S方法的輪胎側偏剛度
在扇形域,輪胎T-S模型規則如下:
IfCfisNiandCrisMi, Then Model isCfiandCri.
Ni和Mi為[PB,PS],表示側偏剛度正大和正小。前后輪側偏剛度工作域分別為[Cfmin,Cfmax]和[Crmin,Crmax]。具體規則表示如表2。其中:
(3)
隸屬度函數:
(4)
基于T-S方法的輪胎側偏剛度為:
(5)
2.3 T-S方法的懸架剛度和阻尼
在扇形工作域,懸架T-S模型規則如下:
IfkxisNiandcxisMi, Then Model iskxiandcxi.
Ni和Mi為[PB,PS],表示懸架模型參數正大和正小。懸架側傾剛度和阻尼系數工作域為[kxmin,kxmax]和[cxmin,cxmax]。具體規則表示如表3。
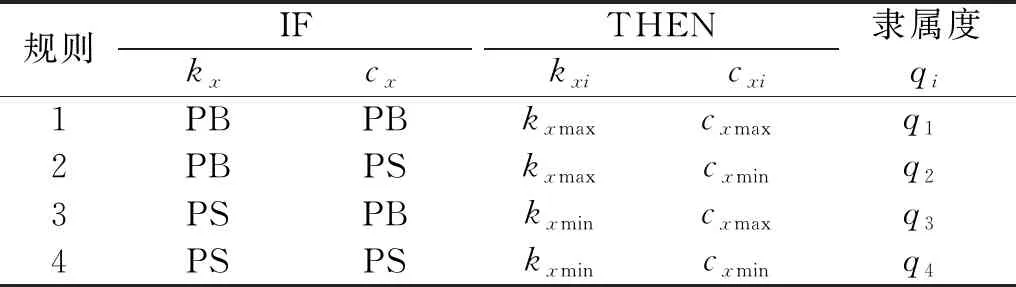
表3 懸架T-S模型規則
其中:
(6)
隸屬度函數:
(7)
基于T-S方法的懸架側傾剛度和阻尼系數為:
(8)
2.4 模型參數的模糊觀測
在扇形工作域內,輪胎側偏剛度隨輪胎側偏角連續變化,懸架側傾剛度和阻尼則隨車身側傾角、角速度連續變化。輪胎側偏角、車身側傾角和側傾角速度可以由式(9)得到:
(9)
結合式(9),將式(9)得到的前后輪側偏角、車身側傾角和側傾角速度作為輸入,通過輪胎和懸架模型動態參數的模糊觀測器,實時觀測車輛前后輪的非線性側偏剛度、車身側傾非線性剛度和阻尼。將模糊觀測的動態模型參數代入式(5)和式(8)得到T-S方法的模型參數。模糊觀測器如圖3所示,其中輪胎與懸架模型參數隨觀測輸入的變化規律并不一致,歸一化處理時區別對待。

表2 輪胎T-S模型規則
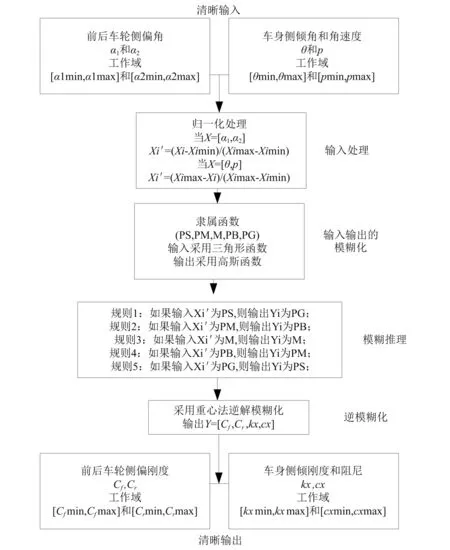
圖3 模型參數模糊觀測器
3 基于T-S模型的動態參數滑模控制
3.1 基于T-S的控制模型
結合模糊觀測器,利用式(5)和(8)獲取將非線性輪胎和懸架的T-S模型,代入式(2),得到T-S方法的聯合控制模型如式(10):
(10)

其中:
(11)
(12)
3.2 考慮橫向偏移載荷的理想橫擺和側傾運動
車輛橫擺運動在穩態下橫擺角速度rs如式(13):
(13)
受到路面附著狀態影響,穩態橫擺角速度rs還受到式(14)約束,式(14)包含2個約束,前者表示輪胎側向力應小于地面摩擦力極限,后者表示側向慣性力矩應小于輪胎橫向載荷偏移極限:
(14)
式中:0<ζ<1表示載荷偏移率,ζ=1表示一側輪胎離地,ζ=0表示兩側輪胎載荷平衡,df表示整車質心距地高度。
式(15)引入一階延遲環節ts得到期望橫擺角速度rd狀態方程如式(16):
(15)
(16)
在轉向過程中載貨車輛的橫擺角速度應趨于理想狀態rd,質心側偏角、車身側傾角和側傾角速度越小越好,則轉向過程控制變量e如式(17):
(17)
將式(16)和式(17)代入式(10),得到載貨車輛側傾-橫擺跟蹤控制方程:
(18)
其中:
rank([CACA2CA3C])=4,方程(18)能控。當式(18)的偏差向量e趨近于零,載貨車輛橫擺側傾運動狀態均趨于理想狀態。
3.3 橫擺運動動態參數滑模控制
從式(18)得到橫擺控制方程如下:
(20)
對于質心側偏角偏差eβ和橫擺角速度偏差er,建立滑模面函數S1:
S1=η1eβ+η2er
(21)
當滑模函數S1=0,無法確保質心側偏角偏差eβ和橫擺角速度偏差er同時趨近于零。
令滑模函數S1=0時,使質心側偏角偏差eβ始終趨近于零,可以保證橫擺角速度偏差er同時趨近于零。基于此將橫擺角速度偏差er表示:
er=(S1-η1eβ)/η2
(22)
將式(22)代入橫擺控制方程(20)中的第一個式子,消除式中控制變量er,得到僅含質心側偏角偏差eβ狀態方程:
(23)
(24)
代入式(23),則:
(25)
當橫擺運動滑模函數S1=0:
(26)
k=A11-A12η1/η2
(27)
當k處于負半面,式(26)中的質心側偏角漸近穩定。則若要使質心側偏角偏差eβ穩定,滑模參數應滿足:
(28)
其中λ隨前后輪的瞬時側偏剛度、前進車速變化,將式(28)代入式(21),得到包含動態參數λ的改進型滑模面函數S1:
S1=η2(λeβ+er)
(29)
設置正常數σ1、κ1,令主動橫擺力矩:

κ1S1-σ1Sgn(S1)
(30)
其中第一項為等效滑模控制,第二項為切換魯棒控制,第三項為擾動控制。以此輸入主動橫擺力矩控制,當滑模函數S1漸近穩定于零,則側偏角偏差eβ和橫擺角速度偏差er均漸近穩定。
3.4 側傾運動滑模控制
對于載貨車輛側傾運動θ和p,建立側傾滑模面函數,其中η3>0,滿足赫爾維茨判據:
S2=η3eθ+ep
(31)
(32)
(33)
式(33)中fr反應了當前速度、方向盤轉角輸入下的穩態側向慣性力矩,以此設置前饋控制項使車身反向側傾以抵抗側翻趨勢。
設置正常數σ2、κ2,令主動側傾力矩:
Ux=-[Ix(A43eθ+(A44+η3)ep)+fr+f′]-
κ2S2-σ2Sgn(S2)
(34)
其中第一項為等效滑模控制,第二項為切換魯棒控制,第三項為擾動控制。以此輸入主動側傾力矩控制,當滑模函數S2漸近穩定于零,則車身側傾狀態θ和p均漸近穩定于零。
3.5 Lyapunov穩定性分析
為分析系統穩定性,設置Lyapunov函數:
(35)

S2((A43eθ+(A44+η3)ep+D4fd)+C42Ux)=
-S1(σ1Sgn(S1)+κ1S1)-S2(σ2Sgn(S2)+κ2S2)=
(36)
(37)
對式(36)進行簡化和推導得到式(37),可見該控制系統在Lyapunov框架下是漸近穩定的。基于T-S模型的載貨車輛橫擺-側傾動態參數滑模控制流程如圖4所示。
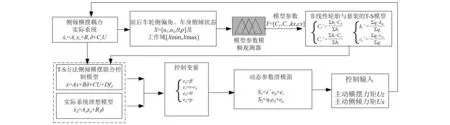
圖4 載貨車輛橫擺-側傾聯合控制流程圖
4 結果分析
為評價所提出的基于T-S模型動態參數滑模控制的性能,在Trucksim中進行仿真驗證。方向盤輸入采用Sine with Dwell曲線模擬載貨車輛極限狀態,最大方向盤轉角270 deg,前輪轉角如圖5所示,車輛前進速度vx恒定為80 km/h。
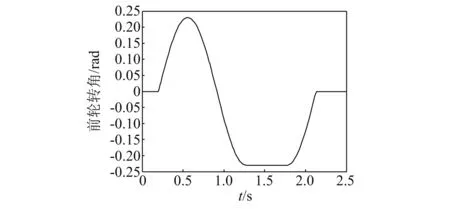
圖5 Sine with Dwell 輸入的前輪轉角
在不同路面摩擦系數μ下對比傳統滑模控制、無控制工況載貨車輛的轉向過程,分析本文方法的控制性能,以整車質心側偏角、橫擺角速度、車身側傾角和橫向載荷轉移率LTR作為評價車輛操穩性和側翻穩定性的指標,考察輪胎、懸架力矩和動態滑模參數的變化,仿真結果如圖6~圖8所示。
(1)圖6給出一般良好路面下T-S滑模控制對載貨車輛穩定性的影響,路面摩擦系數μ=0.8。圖6(a)給出了轉向過程載貨車輛質心側偏角,無控工況下隨著方向盤轉角增大,質心側偏角迅速升高,在方向盤駐留過程1.2 s和1.7 s之間,質心側偏角仍然在持續增大,說明載貨車輛運動方向已嚴重偏離駕駛員預期,需要主動橫擺力矩干預;在無T-S方法滑模控制下,質心側偏角度被限制在較小的范圍內,隨著方向盤輸入增大,質心側偏角的變化趨勢與無控車輛相反,這說明無T-S方法滑模控制的主動橫擺力矩過大,在此過程過度干預;本文T-S方法滑模控制下,載貨車輛的質心側偏角變化趨勢與無控車輛一致,但質心側偏角的幅值限制在較小范圍內,這表明本文方法對車輛極限狀態能夠及時適量控制。
由圖6(b),無控載貨車輛的橫擺角速度已超出期望轉速,發生過度轉向;無T-S方法滑模控制下,橫擺角速度降低在期望轉速以下,但由于主動橫擺力矩過度干預,橫擺角速度過小使車輛轉向不足;本文方法下橫擺角速度與期望轉速基本一致,表明在該方法控制下車輛能夠快速準確跟蹤期望轉速。
圖6(c)為載貨車輛車身側傾角,無控工況下,車身側傾角度隨著轉向角增大發生大幅偏轉,使得車輛接近側翻危險狀態,在方向盤駐留時間內無法自主回轉,需要主動側傾力矩控制;兩種滑模控制下,載貨車輛車身側傾幅度降低,而且車身側傾角度與無控車輛變化趨勢相反,這是由于主動側傾力矩中包含前饋控制項,在方向盤轉向時即產生前饋側傾力矩使車身側傾,以抵抗轉向過程的側傾趨勢;對比兩種滑模控制效果,T-S方法滑模控制明顯降低了前饋車身側傾幅度,避免主動側傾力矩過度干預,以使車身側傾狀態處于易控范圍。
圖6(d)和(e)進一步說明了T-S方法對實際輪胎橫擺力矩和車身側傾力矩的模擬準確度。無T-S方法滑模控制下,極限狀態下輪胎側偏角和懸架側傾角均處于非線性工作域,模擬力矩無法跟蹤實際力矩輸出,導致主動控制力矩偏大。T-S模型在非線性工作域內仍然能夠有效跟蹤實際力矩,相對無T-S方法的輪胎橫擺力矩和懸架側傾力矩,分別降低了兩者模擬誤差極值的91.4%和18.8%,極大提高滑模控制的準確性,表明基于模糊觀測的T-S方法在極限狀態下具有較強的魯棒性。
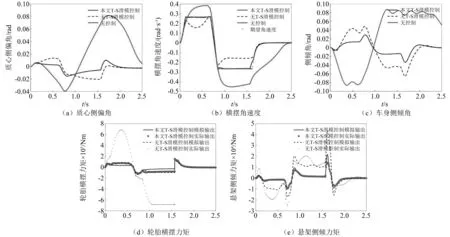
圖6 T-S方法對車輛穩定性的影響,路面摩擦因數μ=0.8
由此可以看出,結合模糊觀測器的T-S方法能夠準確模擬輪胎和懸架在非線性區域的變化,有效改善載貨車輛極限狀態下的操穩性。
(2)為了驗證滑模動態參數對滑模控制影響,圖7給出了低附著路面下3種滑模工況的載貨車輛運動仿真結果,路面摩擦因數μ=0.2。其中純橫擺滑模控制和橫擺側偏角組合滑模控制,均為兩種傳統的主動橫擺力矩控制方法。純橫擺表示滑模面S1僅考慮橫擺角速度偏差er,橫擺側偏角組合表示滑模面S1是橫擺角速度偏差er和質心側偏角偏差eβ的線性組合,滑模系數η1和η2均為正常數。
由圖7(a)和(b),在低附著路面條件下,兩種傳統滑模控制方法無法對車輛橫擺運動狀態進行有效控制。其中純橫擺滑模控制下,由于滑模函數沒有直接對質心偏角進行控制,質心側偏角只能在系數A11的作用下收斂,低附著條件下車輛極限狀態的輪胎側偏剛度均大幅下降,導致質心側偏角在大轉向擾動下不能快速收斂;在橫擺側偏角組合滑模控制下,由于滑模組合的參數設置使得質心側偏角運動方程的特征值出現在正半面,使轉向過程車輛的質心側偏角發散;本文控制方法通過動態滑模參數λ,令質心側偏角運動方程的特征值處于負半面,使其始終處于快速收斂區域,表明本文動態滑模參數在輪胎側偏剛度的非線性區域具有強自適應性。
由圖7(c),在兩種傳統滑模控制下,載貨車輛的車身側傾角雖然較小,但最后已經無法收斂到穩定狀態,表明車輛已經處于側滑失控趨勢;本文動態參數滑模控制下,載貨車輛車身側傾角度均處于較小幅度內,且能夠快速收斂。
圖7(d)給出了動態滑模參數在轉向控制中的變化,動態滑模參數λ<0,并隨著轉向角在一定范圍內變化。結合純橫擺和橫擺側傾角組合滑模控制的控制效果,在低附著條件,滑模函數質心側偏角的系數η1≥0時,對質心側偏角的控制效果已不能達到預期,本文動態滑模參數則能適應輪胎側偏剛度的非線性變化,這進一步說明了本文動態滑模參數在低附著路面的控制優勢。

圖7 滑模動態參數對車輛穩定性的影響,路面摩擦因數μ=0.2
結合圖6,可見基于T-S方法的動態參數滑模控制能夠適應良好路面和低附著路面,能夠降低極限狀態下的質心側偏角和車身側傾角,快速準確地跟蹤預期橫擺角速度,具有較強的魯棒性和自適應性。
(3)為了分析本文基于T-S方法的動態參數滑模控制對載貨車輛側翻穩定性的影響,圖8給出了高附著路面下3種控制工況下的載貨車輛運動仿真結果,路面摩擦因數μ=1.1。
由圖8(a)和(b),在高附著路面條件,相比于無控制下的車輛橫擺運動,傳統滑模控制和本文動態參數滑模控制效果基本一致,均能對質心側偏角和橫擺角速度進行有效控制,但本文方法在期望橫擺角速度的跟蹤上更準確、更快速。
由圖8(c)和(d),載貨車輛在無控狀態下的車身側傾角度隨著轉向角增大,在轉向駐留時間內無法迅速回復,導致橫向載荷轉移率長時間接近極限值,轉向過程側翻穩定性較差。無側傾控制工況,由于車輛橫擺運動處于穩定控制下,在一定程度上降低了車輛側向加速度,略微減小側傾幅度,仍需要主動側傾控制來提高側翻穩定性。在本文滑模聯合控制下,載貨車輛側傾角隨著轉向角增大呈現相反的變化趨勢,這是由于主動側傾力矩中包含的前饋控制項,使得車身提前側傾產生抵抗轉向過程中的側翻趨勢,明顯降低了橫向載荷轉移率LTR,顯著提高了載貨車輛轉向過程的側翻穩定性。
圖8(e)給出了動態滑模參數在轉向過程的變化,可以看出,在高附著路面條件下,動態滑模參數λ>0,隨著轉向角在一定范圍內變化。這說明了動態滑模參數在高附著路面條件下的適應性,結合圖6和圖7,表明了本文基于T-S方法的動態參數滑模控制具有不同路面附著條件下的強自適應性。
由圖6、圖7和圖8,結合模糊觀測器的T-S方法能夠準確模擬輪胎和懸架在非線性區域的變化,有效改善車輛極限狀態的操縱穩定性和側翻穩定性;動態參數的滑模控制能夠適應路面摩擦狀態和系統非線性,具有魯棒性和自適應性;該方法在非線性工作域實現載貨車輛橫擺和側傾的聯合控制,性能優于傳統滑模控制。
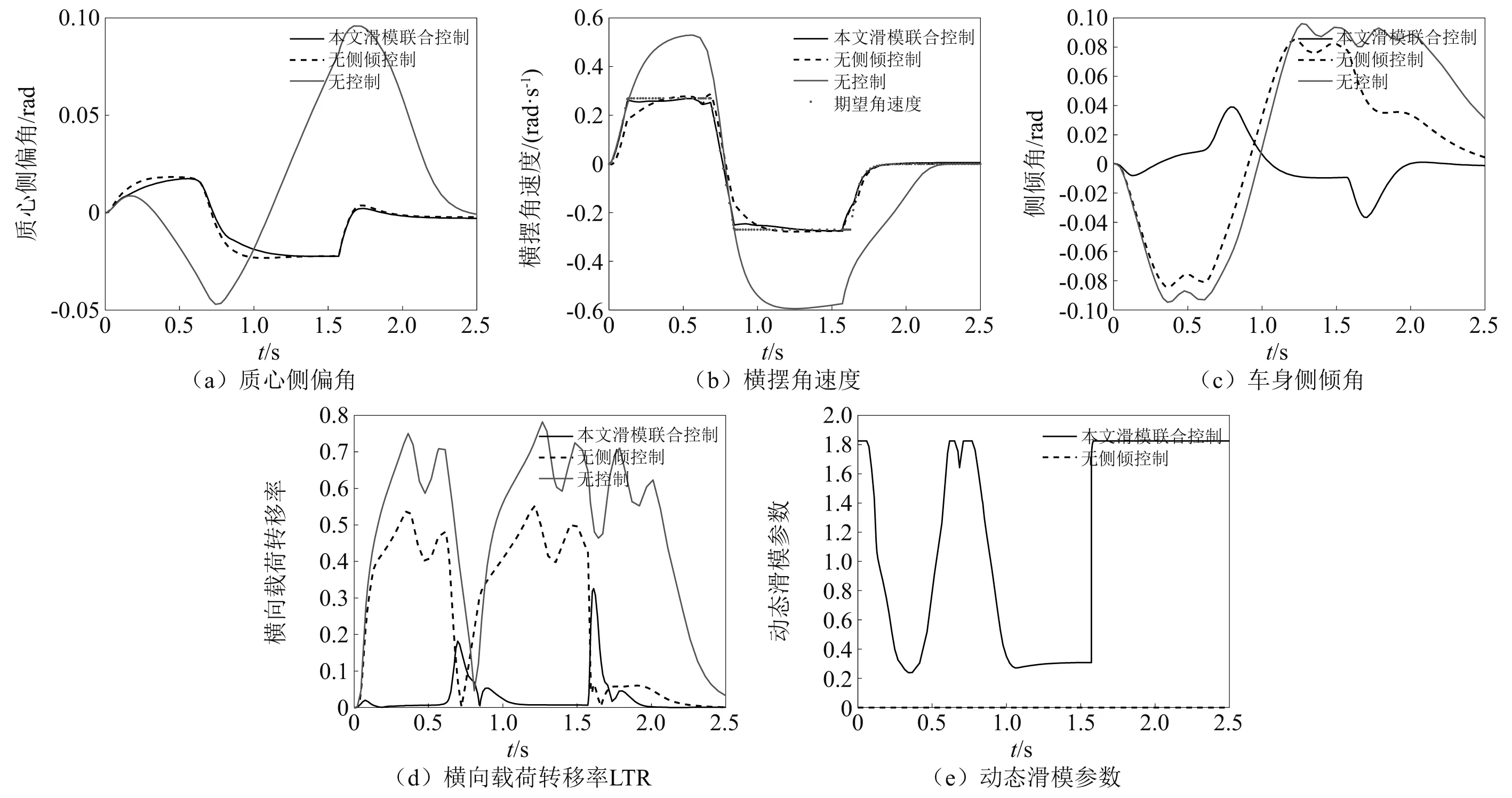
圖8 本文T-S動態參數滑模控制對側翻穩定性的影響,路面摩擦因數μ=1.1
(4)文獻[20]中對車輛極限工況橫擺穩定性判據進行對比分析,其中橫擺角速度判據方法各方面性能突出。橫向載荷轉移率LTR能直觀反映車輛實施側傾狀態,而被廣泛應用于側翻穩定性研究。為進一步分析本文T-S動態參數滑模方法對載貨車輛的控制效果,結合極限工況下橫擺穩定性判據方法和側翻穩定性評價方法,以橫擺角速度差值和橫向載荷轉移率LTR作為載貨車輛極限狀態穩定性評價指標,如式(38)。
(38)
式中:Sr表示橫擺穩定性指標;SL表示側翻穩定性指標;r為載貨車輛橫擺角速度;rd為線性參考模型橫擺角速度;ΔFlr為左右車輪垂向載荷之差;FT為所有車輪垂向載荷總和。
表4給出載貨車輛穩定判據,通過橫擺穩定性和側翻穩定性來綜合評價,當且僅當轉向穩定和側翻穩定,載貨車輛處于穩定狀態。其中Mr、ML分別為橫擺穩定閾值、側翻穩定閾值,為便于分級比較控制效果,通過仿真試驗分析,取Mr=0.1 rad/s,ML1=0.5,ML2=0.9。
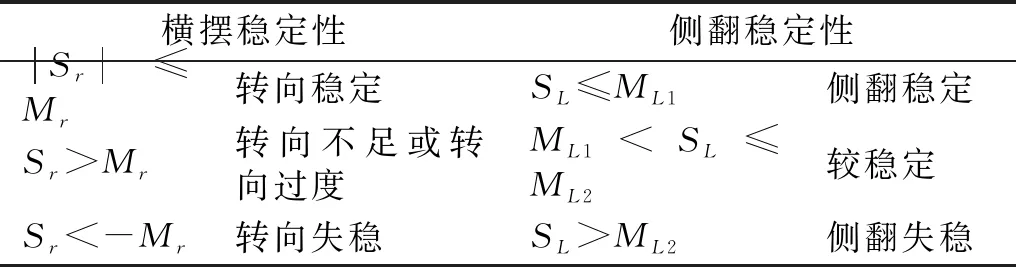
表4 載貨車輛穩定判據
圖9和圖10給出了載貨車輛在低速和高速下極限狀態的控制效果,其中工況1和工況2分別對應前文不同摩擦因數下的對比工況。由圖9和圖10,當路面摩擦因數μ=0.2、0.8、1.1,車速40和80 km/h,本文方法下載貨車輛橫擺穩定指標絕對值小于0.1,側傾穩定指標小于0.5,其極限狀態始終處于橫擺和側翻穩定域,說明了本文方法在不同路面摩擦因數和車速下的適應性和穩定性。
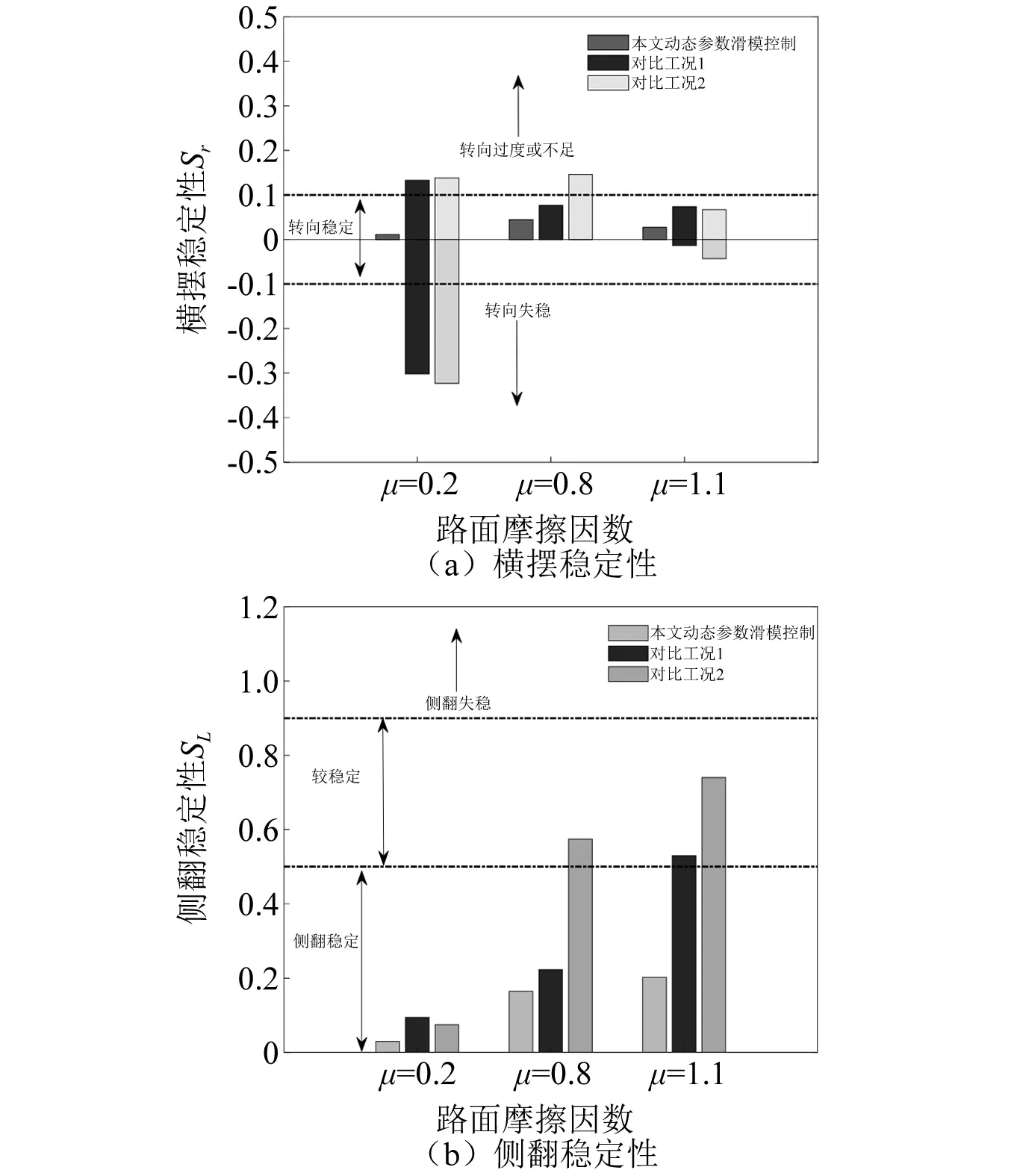
圖9 載貨車輛極限狀態穩定性,車速40 km/h
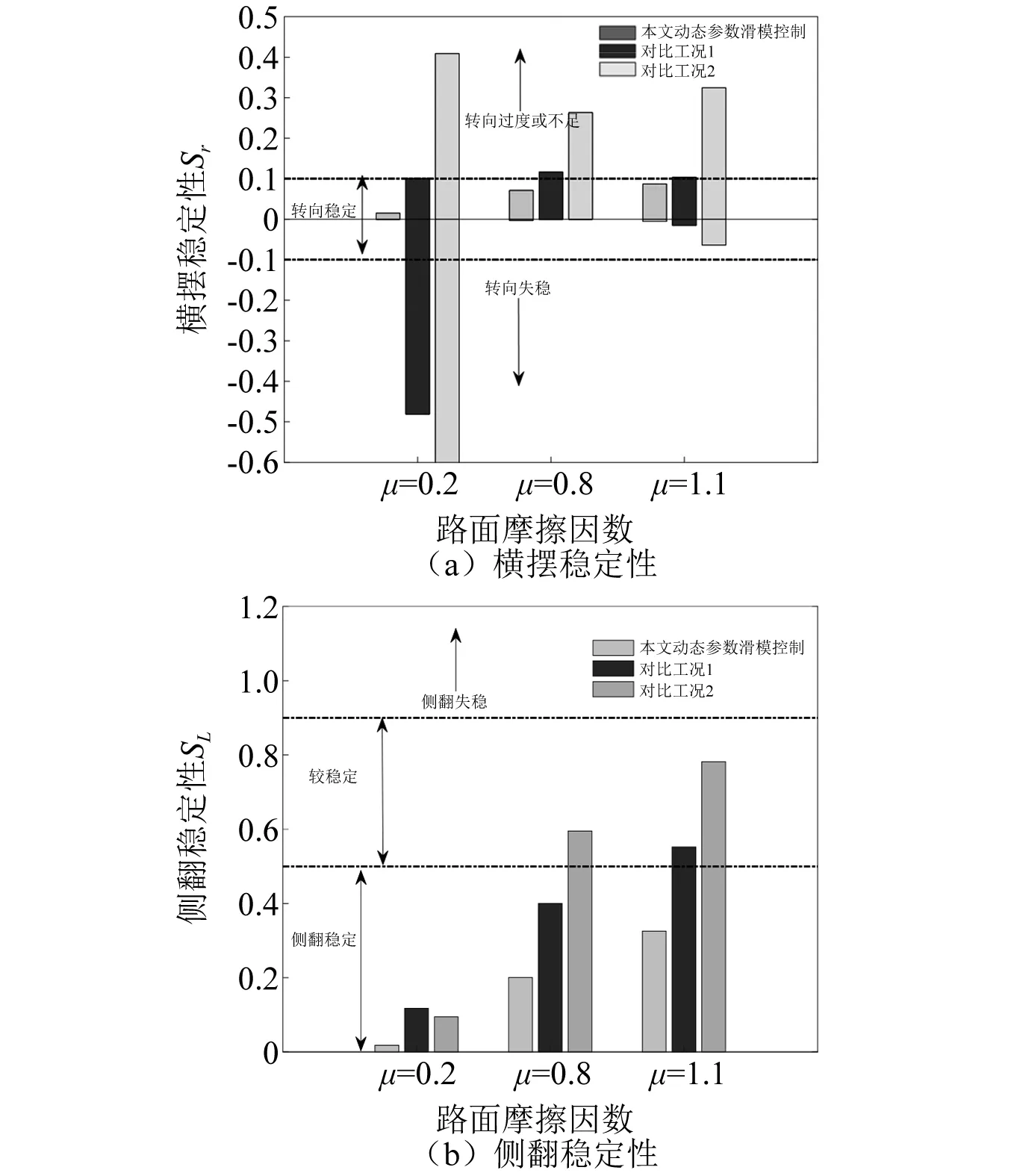
圖10 載貨車輛極限狀態穩定性,車速80 km/h
在低路面摩擦因數μ=0.2,車速由40 km/h增加到80 km/h,兩種傳統滑模對比工況的橫擺穩定負極限均超出轉向穩定界限,而本文方法橫擺穩定指標始終位于正半面,相對轉向過度和不足界限仍有89%和85%的穩定閾度。低路面摩擦下傳統滑模方法橫擺穩定性較差,載貨車輛極限狀態的轉向失穩程度增加,這也進一步說明本文方法的重要性。
在一般路面μ=0.8,本文方法在保障橫擺穩定性的基礎上,有效改善了載貨車輛極限狀態的側傾穩定性,相對于無T-S滑模控制和無控制兩種工況,在車速40 km/h(80 km/h),側傾穩定指標分別提高25.9%(49.9%)和71.3%(66.3%)。當行駛于良好路面μ=1.1,載貨車輛橫擺穩定性相對提高,但轉向過程更易發生側傾失穩,相較于無側傾控制和無控制兩種工況,本文方法在車速40 km/h(80 km/h),側傾穩定指標分別提高61.9%(41.1%)和72.7%(58.4%)。在不同車速和路面條件下,本文方法實現了非線性域的橫擺和側傾聯合控制,有效改善載貨車輛極限狀態穩定性。
5 結 論
基于T-S方法橫擺-側傾聯合控制模型,考慮橫向載荷偏移對期望橫擺角速度的影響,建立橫擺狀態和側傾狀態滑模面,設計了改進型滑模面的動態參數,并對控制系統進行Lyapunov穩定性分析。在不同路面摩擦因數μ下對比傳統滑模控制、無控制工況載貨車輛的轉向過程,分析本文方法控制性能。得到以下結論:
(1)結合模糊觀測器的T-S方法能夠準確模擬輪胎和懸架在非線性區域的變化,明顯降低輪胎橫擺力矩和懸架側傾力矩的模擬誤差極值,有效改善車輛極限狀態的操縱穩定性和側翻穩定性;
(2)動態參數的滑模控制能夠適應路面摩擦狀態和系統非線性,當路面摩擦因數μ=0.2、0.8、1.1,車速40和80 km/h,其極限狀態始終處于橫擺和側翻穩定域,表現出良好的魯棒性和自適應性;
(3)該方法在非線性工作域實現載貨車輛橫擺和側傾的聯合控制,在不同路面摩擦下保障橫擺穩定性,顯著改善低速和高速轉向的側傾穩定性,性能優于傳統滑模控制。
