基于NI myRIO的移動機器人滅火系統設計
2021-06-30 03:22:25李燦韓海川
科技風 2021年1期
關鍵詞:移動機器人
李燦 韓海川

摘要:本文基于NI myRIO為控制單元,結合火焰傳感器定位著火的位置來指導滅火裝置執行操作,通過紅外測距傳感器與伺服電機控制滅火機器人的位置姿態,通過攝像頭實時傳送滅火現場的圖像信息,使用LabVIEW編寫控制程序實現滅火機器人的智能化,通過對多源傳感器的數據采集與分析,來精確反饋給驅動電機動作指令,可以實現智能滅火的研究目的。
關鍵詞:myRIO;移動機器人;滅火
現如今我國職業教育已經進入全新的發展時期,技工教育已經在社會發展中承擔著培養高技能人才的重要任務。在國家倡導中國制造2025的政策背景下,機器人既是“中國制造2025”確定的重點發展領域,也是先進制造業的代表。本文研究的移動滅火機器人主要在兩個方面進行研究:一是增強其圖像識別與處理技術,將其識別不同顏色的功能轉變為識別火苗功能;二是增強傳感器多源信息融合功能,結合火焰傳感器和紅外測距傳感器,指導驅動電機和滅火裝置進行精確高效滅火,此技術在監測自然火災以及各行業線路的實時監控與巡查維修中具有非常廣闊的應用前景。
1 世界技能大賽移動機器人賽項任務分析
基于NI myRIO的移動機器人滅火系統源于移動機器人賽項原型,賽項任務屬于團體賽,須兩人合力完成。在競賽過程中首先需要完成機械部分的安裝與調試,保證機械零件連接緊固、正確,電氣接線符合要求。且其在運動過程中,運動部件應運轉靈活、不與其自身零件發生碰擦,裝配后機器人應美觀整潔、接線整齊。其次完成軟件部分的安裝調試,實現移動機器人在安全無碰撞的條件下,通過遙控或自主尋找的方式,快速規劃好賽場路徑,識別處理賽場上的臺球顏色,將賽場中不同顏色的臺球進行搬運,并快速放在指定的圖形碼存儲區域內。
2 硬件設計
myRIO控制器模塊是整個控制系統的核心部分,集成了一個嵌入式實時處理器、一塊高性能FPGA芯片以及板載模擬與數字輸入輸出I/O接口。所有I/O都直接連接到FPGA上,提供了定時與I/O信號處理的底層定制。FPGA通過高速PCI總線連接到嵌入式實時處理器。控制器包含了內置的數據傳輸方式,用于將數據從I/O傳送到FPGA,或是從FPGA傳送到嵌入式處理器上,用于實時分析、后處理、數據記錄或是與聯網的主機進行通信。
myRIO控制器運行高可靠性的Wind River VxWorks實時操作系統上,確定性地執行LabVIEW開發的實時應用程序。LabVIEW開發工具含內建函數庫,用于在FPGA以及myRIO嵌入式系統中的實時處理器之間傳送數據。
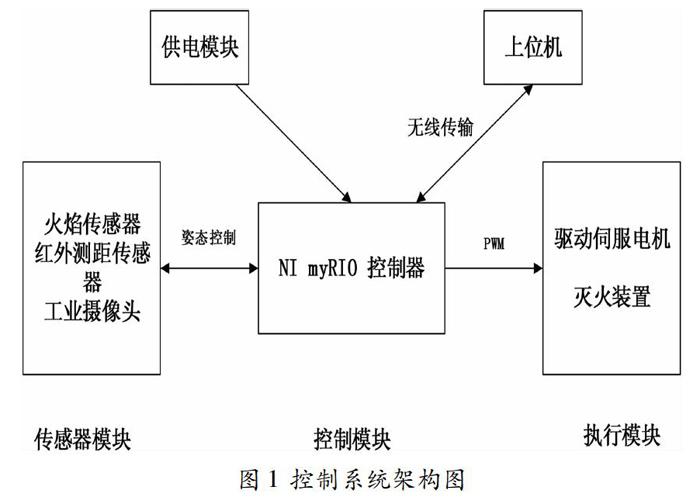
本系統硬件部分由NI myRIO控制器模塊、傳感器模塊、執行模塊、電源模塊、上位機模塊等組成。其中myRIO控制器模塊主要由板載的Xilinx ZynqFPGA芯片和雙核ARM Cortex A9 CPU組成,同時具備了模擬量采集和高速DIO接口資源、在通信接口方面myRIO板載了USB接口與無線通信模塊,控制器主要負責傳感器的數據采集與信號處理、運行控制邏輯、驅動執行模塊、以及數據通信。傳感器模塊包含了火焰傳感器、紅外測距傳感器以及工業相機,火焰傳感器可以檢測火焰或者波長在760納米~1100納米范圍內的光源。紅外測距傳感器是利用紅外光的發出和反射來計算發射與接收的時間差的數據,可以經信號處理器處理計算物體的距離。工業相機通過USB接口與myRIO控制器連接,能夠實時傳回現場的火焰圖像信息。
傳感器模塊收集到的信息經過myRIO控制器的運算處理,把指令傳送給執行模塊,其中兩臺伺服電機分別驅動機器人本體的左右輪運動,通過左右差速的方式來實現轉彎動作進行目標定位;定位準確后通過火焰傳感器返回指令給myRIO控制器,控制器使能滅火裝置進行滅火。
3 軟件設計
控制系統軟件程序設計以myRIO模塊化、多線程的軟件設計思想開發而成,具備數據采集、運動控制、網絡通信、實時數據顯示的功能。
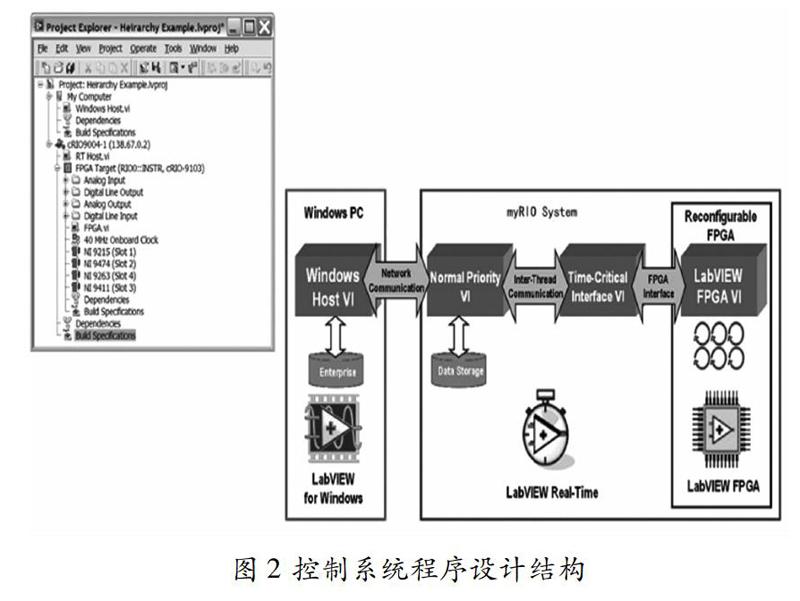
整個軟件可分成三部分,分別是FPGA代碼、RealTime(簡稱RT)代碼、Host代碼。其中FPGA代碼運行于可編程邏輯列陣FPGA芯片上,主要實現的是數據采集功能;RT代碼運行于實時控制器中,主要實現的是數據的讀取、存儲和發送功能;Host代碼運行于上位機中,主要實現人機交互功能,如顯示數據、發送命令、管理數據、數據回放等。FPGA和RT均集成在myRIO中,通常稱為下位機,與下位機之間通過標準的TCP協議進行通信。
軟件的采用NI LabVIEW編程,主要包含數據采集模塊、數據處理模塊、上位機模塊、運動控制模塊;由數據采集模塊收集火焰的狀態與車身距離事故點的距離以及現場的圖像信息,由數據處理模塊計算出車身當前位置與滅火點的相對位置,并把圖像信息實時傳輸給上位機,同時根據計算的相對位置結果給運動控制模塊,進而知道驅動電機和滅火裝置動作,實現自動滅火的目的。
數據采集模塊通過與myRIO板載的FPGA進行數據交互,讀取到火焰傳感器、紅外測距傳感器以及工業相機和編碼器數據,并將數據發送到myRIO控制器的實時系統中,數據傳輸到實時系統中進行數據的解析,解析轉換成工程物理單位,然后把數據發給數據處理模塊。
數據處理模塊接收到采集的數據后會完成兩部分工作,一部分是火焰傳感器和工業相機的數據傳輸給上位機,進行實時的界面顯示,另一部分是接收上位機的控制指令,按照指令要求進行數據運算和處理,計算得出機器人距離滅火點的位置以及火焰傳感器的物理量;
上位機模塊,軟件界面主要有圖像顯示區域,是用于顯示攝像頭采集的圖像;操作按鈕,包括自動手動模式切換按鈕、滅火裝置使能按鈕、前進后退按鈕,左轉右轉按鈕,開關按鈕;顯示控件,包括電源電壓、機器人工作狀態顯示、火焰傳感器數據顯示等;運動控制模塊,關于車身運動到火焰位置的自動追蹤是通過軟件的PID算法實現的,圖3是控制系統的原理圖。
4 結語
本文所設計的基于NI myRIO滅火機器人控制系統,結合LabVIEW編程語言進行軟件功能開發,成功地完成了滅火機器人自動控制嵌入式系統。并且運用傳感器融合技術、無線Wi-Fi通信技術、自動控制技術、機器視覺等多方面技術,使控制系統具備可靠性高、實時性能好、擴展性能優越的技術特點。該設計不僅實現了滅火機器人控制系統的自動巡檢、實時報警并處理、實時狀態監測,且整個系統的具有智能互聯的能力,能夠結合多臺系統組成分布式滅火機器人測控系統。為智能制造領域的滅火機器人測控系統方向提供了一個可參考的技術路線。為加大技工教育技能創新發展,大力培育支撐中國制造、中國創造的高技能人才隊伍提供了新方向。
參考文獻:
[1]黃圓志.智能礦井滅火機器人行走機構設計及運動仿真[J].價值工程,2019,38(22):189-191.
[2]邢進,王召松,牛樹訓.移動式自動滅火機器人及其滅火方法研究[J].信息與電腦(理論版),2019(12):107-108.
[3]王騰飛,翟亞芳,李立.基于NI myRIO的玉米種植監控系統設計[J].電子產品世界,2019,26(05):46-49.
[4]劉群,石銀霞,張玨,徐研.可自動更換滅火彈的消防機器人應用研究[J].電工技術,2019(02):110-112.
[5]孫寧,裴文良,閔桂元,王永軍.消防滅火機器人設計及應用[J].消防科學與技術,2018,37(07):942-944.
[6]王云磊.基于NI myRIO的智能移動機器人設計[D].天津職業技術師范大學,2018.
[7]姜永昌.基于傳感器數據融合的氣體滅火機器人設計[J].數字通信世界,2018(02):169+179.
[8]李方良.基于NI myRIO的四旋翼飛行器的設計與研究[D].太原理工大學,2016.
作者簡介:李燦(1989— ),女,漢族,天津人,碩士,二級實習指導教師,研究方向:工程實踐創新。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19