艦載發(fā)射裝置捷聯(lián)慣組正交安裝誤差標(biāo)定方法
2021-07-03 07:29:00潘樹國
艦船科學(xué)技術(shù) 2021年5期
關(guān)鍵詞:測量
王 勇,黃 龍,潘樹國
(1. 中國船舶集團公司第七一三研究所,河南 鄭州 450015;2. 海軍裝備部駐鄭州地區(qū)軍事代表室,河南 鄭州 450015)
0 引 言
指向精度,作為導(dǎo)彈武器框架結(jié)構(gòu)精度的重要指標(biāo)之一,是指固連在框架上的單位矢量,經(jīng)過發(fā)射裝置轉(zhuǎn)動一定角度后,實際指向與其應(yīng)達到的指向之間的角度偏差[1]。偏差主要來源于基座安裝誤差、軸承跳動、定位和測量誤差等。發(fā)射裝置指向精度的優(yōu)劣,直接影響導(dǎo)彈的初始發(fā)射精度,是導(dǎo)彈是否能夠準(zhǔn)確命中目標(biāo)的關(guān)鍵因素之一[2]。在導(dǎo)彈點火時,如果發(fā)射裝置提供的實際指向角度誤差不能滿足武器系統(tǒng)需求,則需要對發(fā)射裝置指向精度進行修正和補償。某艦載導(dǎo)彈武器系統(tǒng)采用將捷聯(lián)慣性測量組合(簡稱捷聯(lián)慣組,Strapdown Inertial Measurement Unit,SIMU)直接固連在發(fā)射裝置俯仰架上,隨俯仰架一起運動,捷聯(lián)慣組內(nèi)部的角速率陀螺儀和加速度儀,直接測量架上導(dǎo)彈的角運動物理量,將數(shù)據(jù)傳遞給武控系統(tǒng),經(jīng)武控系統(tǒng)融合發(fā)射裝置位置信息后進行解算,通過發(fā)控設(shè)備為導(dǎo)彈裝訂基準(zhǔn)數(shù)據(jù)參數(shù),如圖1所示。因此,如何準(zhǔn)確地將發(fā)射瞄準(zhǔn)的基準(zhǔn)數(shù)據(jù)測得并賦予導(dǎo)彈武器系統(tǒng),是某艦載導(dǎo)彈武器系統(tǒng)總體方案的關(guān)鍵技術(shù)之一。
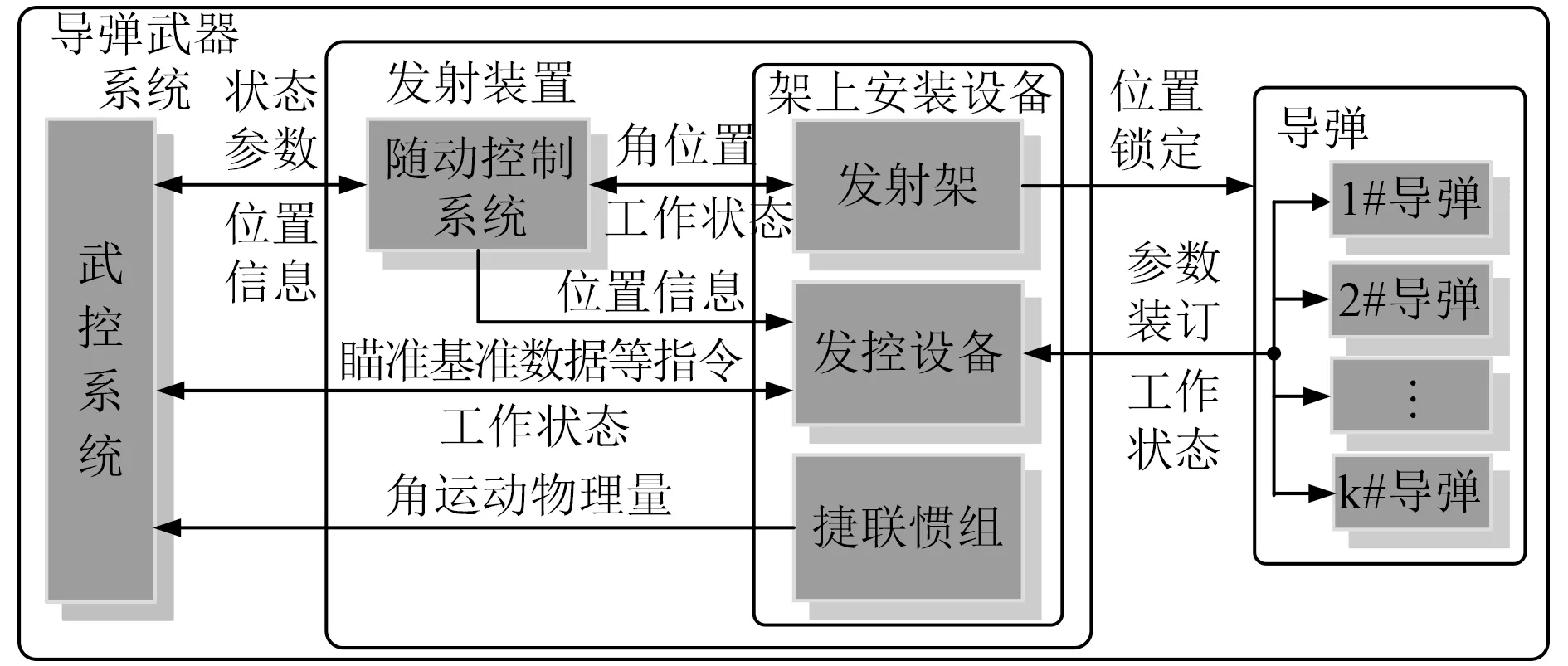
圖1 某艦載導(dǎo)彈武器系統(tǒng)總體方案示意Fig. 1 General scheme of a ship-based missile weapon system
當(dāng)捷聯(lián)慣組在發(fā)射裝置上安裝后,理想情況下,捷聯(lián)慣組的慣性組件敏感軸構(gòu)成的坐標(biāo)系應(yīng)與發(fā)射裝置俯仰架所在坐標(biāo)系重合。但由于慣性組件安裝定位和產(chǎn)品加工工藝限制,2個坐標(biāo)系坐標(biāo)軸不可避免地會存在一定的角度誤差,造成發(fā)射裝置的實際指向與捷聯(lián)慣組測量值在偏航、滾轉(zhuǎn)和俯仰3個方向上產(chǎn)生一定程度的偏差,直接影響導(dǎo)彈的發(fā)射精度。本文提出了一種針對捷聯(lián)慣組在某艦載傾斜瞄準(zhǔn)式發(fā)射裝置上安裝時產(chǎn)生的正交安裝誤差的標(biāo)定方法,并通過合理的安裝定位措施,減少了捷聯(lián)慣組的正交安裝誤差,提高了發(fā)射裝置上捷聯(lián)慣組測量值與架上導(dǎo)彈實際指向的一致性。
1 誤差描述
捷聯(lián)慣組安裝誤差一般有2種情況:一是由于慣性測量模塊或加速度計的敏感軸按照相互正交的方式安裝引起的偏角誤差,稱之為非正交安裝誤差;二是捷聯(lián)慣組坐標(biāo)系與發(fā)射裝置載體坐標(biāo)系不重合等引起的誤差,稱之為正交安裝誤差[3]。
非正交誤差的存在將引起傳感器測量信息之間的交叉耦合,在使用前必須通過標(biāo)定實驗確定出陀螺儀和加速度計等模塊的各項誤差系數(shù),并在捷聯(lián)慣組系統(tǒng)中進行補償,通常在實驗室轉(zhuǎn)臺上進行標(biāo)定。其中,加速度計通過位置轉(zhuǎn)臺進行標(biāo)定,光纖陀螺通過速率轉(zhuǎn)臺標(biāo)定[4],誤差標(biāo)定方法較為成熟;捷聯(lián)慣組的正交安裝誤差將引起載體實際指向角位置偏差,由于裝載對象的結(jié)構(gòu)復(fù)雜程度、安裝方式的多樣性以及測試場地的條件限制,使正交安裝誤差標(biāo)定方法成為了一個難點。因此,本文主要針對捷聯(lián)慣組在發(fā)射裝置載體上安裝引起的正交安裝誤差標(biāo)定方法開展研究。
2 空間坐標(biāo)系建立和定義
如圖2所示的方位-俯仰兩軸式艦載發(fā)射裝置中,捷聯(lián)慣組與發(fā)射裝置之間采用直接穩(wěn)定方式[5]。捷聯(lián)慣組安裝在俯仰架后部,與發(fā)射裝置的方位軸和俯仰軸同步轉(zhuǎn)動,直接測量導(dǎo)彈在俯仰架上位置等數(shù)據(jù)。

圖2 各空間坐標(biāo)系相對關(guān)系示意圖Fig. 2 Relative relationship diagram of spatial coordinate systems
本文對捷聯(lián)慣組和發(fā)射裝置各部分運動關(guān)系的描述,涉及到空間坐標(biāo)系變換的概念,主要有慣性坐標(biāo)系、大地坐標(biāo)系、基座坐標(biāo)系、方位坐標(biāo)系、俯仰坐標(biāo)系和捷聯(lián)慣組坐標(biāo)系,所有坐標(biāo)系自身三軸兩兩正交且符合笛卡兒坐標(biāo)系規(guī)則[5]。下面結(jié)合圖2對各空間坐標(biāo)系的概念進行定義。
2.1 空間坐標(biāo)系定義
2.1.1 慣性坐標(biāo)系Oi—xiyizi的定義
慣性坐標(biāo)系原點Oi位于地心,xi軸與0°經(jīng)線在赤道平面上投影重合并由地心向外;yi軸與東經(jīng)90°經(jīng)線在赤道平面上投影重合并由地心向外;zi軸與地軸重合指向北方。
2.1.2 大地坐標(biāo)系Ot—xtytzt的定義
大地坐標(biāo)系原點Ot設(shè)定于發(fā)射裝置重心位置垂直向下與大地的交點,xt軸代表當(dāng)前位置的水平東方向;yt軸代表當(dāng)前位置的水平北方向;zt軸代表與重力加速度相反的方向。
2.1.3 基座坐標(biāo)系Ob—xbybzb的定義
基座坐標(biāo)系原點Ob位于發(fā)射裝置基座的幾何中心,xb軸沿發(fā)射裝置基座的縱向指向基座前方,即發(fā)射裝置的方位零點;yb軸沿發(fā)射裝置基座的橫向指向基座左側(cè);zb軸與發(fā)射裝置基座平面垂直并指向上方。本文設(shè)定基座坐標(biāo)系xb-yb平面與大地坐標(biāo)系xtyt平面平行。
2.1.4 方位坐標(biāo)系Oa—xayaza的定義
方位坐標(biāo)系固連于方位軸,其原點Oa位于方位軸與基座上平面的交點,xa軸沿回轉(zhuǎn)架的縱向指向回轉(zhuǎn)架前方,即發(fā)射裝置的方位指向;ya軸沿回轉(zhuǎn)架的橫向指向回轉(zhuǎn)架左側(cè);za軸始終與方位軸重合指向上方。在方位軸處于零位時,xa軸、ya軸分別與基座坐標(biāo)系中xb軸、yb軸平行;在方位軸旋轉(zhuǎn)時,xa軸和ya軸隨方位軸轉(zhuǎn)動而轉(zhuǎn)動,此時xa軸和xb軸(或ya軸和yb軸)之間的夾角α即為發(fā)射裝置方位角。
2.1.5 俯仰坐標(biāo)系Of—xfyfzf的定義
俯仰坐標(biāo)系固連于俯仰軸,其原點Of位于方位軸與俯仰軸的理論交點,xf軸沿俯仰架的縱向指向俯仰架前方,即發(fā)射裝置的俯仰指向;yf軸始終與俯仰軸重合并指向俯仰架的左側(cè);zf軸與xf-yf平面垂直并指向上方。俯仰軸安裝于回轉(zhuǎn)架上,俯仰坐標(biāo)系隨俯仰軸、方位軸的轉(zhuǎn)動而轉(zhuǎn)動,因此,俯仰坐標(biāo)系即為導(dǎo)彈所在坐標(biāo)系。在俯仰軸處于零位時,xf軸、zf軸分別與方位坐標(biāo)系中xa軸、za軸平行;在俯仰軸旋轉(zhuǎn)時,xf軸和zf軸隨俯仰軸轉(zhuǎn)動而轉(zhuǎn)動,此時xf軸和xa軸(或zf軸和za軸)之間的夾角β即為發(fā)射裝置俯仰角。
2.1.6 捷聯(lián)慣組坐標(biāo)系Og—xgygzg的定義
考慮到捷聯(lián)慣組出廠時,已對非正交安裝誤差進行了標(biāo)定,因此,本文設(shè)定捷聯(lián)慣組坐標(biāo)系原點Og位于捷聯(lián)慣組各敏感軸的交點,捷聯(lián)慣組坐標(biāo)系的xg軸、yg軸和zg軸分別與捷聯(lián)慣組內(nèi)結(jié)構(gòu)中對應(yīng)的敏感軸重合。
2.2 空間坐標(biāo)系幾何約束耦合關(guān)系
當(dāng)發(fā)射裝置方位角為α、俯仰角為β時,基座坐標(biāo)系、方位坐標(biāo)系、俯仰坐標(biāo)系和捷聯(lián)慣組坐標(biāo)系之間的幾何約束耦合關(guān)系如圖3所示。

圖3 空間坐標(biāo)系幾何約束耦合關(guān)系示意圖Fig. 3 Schematic diagram of geometric constraint coupling relationship in spatial coordinate system
3 空間坐標(biāo)系誤差機理分析
3.1 誤差分配原則
在發(fā)射裝置實際工作過程中,各空間坐標(biāo)系之間除了幾何約束耦合關(guān)系外,還存在一定的軸系誤差,影響導(dǎo)彈在架上的指向精度和初始數(shù)據(jù)裝訂。主要誤差因素有:發(fā)射裝置方位軸與基座法線的重合誤差、俯仰軸與方位軸的正交誤差、導(dǎo)彈軸線與俯仰軸的正交誤差、捷聯(lián)慣組坐標(biāo)系與其內(nèi)部敏感軸的非正交安裝誤差、捷聯(lián)慣組坐標(biāo)系和俯仰坐標(biāo)系之間的正交安裝誤差等。前文中提到,發(fā)射裝置和捷聯(lián)慣組在各自產(chǎn)品出廠時,已對發(fā)射裝置指向精度和捷聯(lián)慣組的非正交安裝誤差進行了標(biāo)定,因此,本文設(shè)定除捷聯(lián)慣組坐標(biāo)系和俯仰坐標(biāo)系之間的正交安裝誤差外,不考慮其余坐標(biāo)系誤差的影響。
3.2 捷聯(lián)慣組正交安裝誤差機理分析
理想狀態(tài)下,在捷聯(lián)慣組與發(fā)射裝置之間不存在正交安裝誤差時,捷聯(lián)慣組坐標(biāo)系的xg軸、yg軸、zg軸分別與架上導(dǎo)彈所在的俯仰坐標(biāo)系中xf軸、yf軸、zf軸重合。但在實際工程應(yīng)用中,由于定位方式和加工工藝等因素的影響,捷聯(lián)慣組與發(fā)射裝置之間產(chǎn)生的正交安裝誤差不可避免。此種情況下,xg軸和xf軸、yg軸和yf軸、zg軸和zf軸之間形成的夾角分別產(chǎn)生偏航誤差δ、滾轉(zhuǎn)誤差ε和俯仰誤差ζ。為保證捷聯(lián)慣組數(shù)值能夠盡可能代表架上導(dǎo)彈的運動矢量,提高導(dǎo)彈命中精度,必須對捷聯(lián)慣組正交安裝誤差形成的偏航、滾轉(zhuǎn)和俯仰誤差進行標(biāo)定。捷聯(lián)慣組坐標(biāo)系到俯仰坐標(biāo)系的變換過程如圖4所示。

圖4 捷聯(lián)慣組坐標(biāo)系到俯仰坐標(biāo)系變換過程Fig. 4 Transformation process from SIMU coordinate system to pitching coordinate system
3.3 捷聯(lián)慣組正交安裝誤差標(biāo)定原理
從圖4可以看出,將發(fā)射裝置上捷聯(lián)慣組的正交安裝誤差量化后,從捷聯(lián)慣組坐標(biāo)系到俯仰坐標(biāo)系的變換需要依次繞不同的坐標(biāo)軸進行旋轉(zhuǎn),次數(shù)為3次,每次轉(zhuǎn)動可以利用正交安裝誤差角度δ、ε、ζ來完成2個坐標(biāo)系之間的轉(zhuǎn)換,從而實現(xiàn)捷聯(lián)慣組正交安裝誤差的標(biāo)定。將這種坐標(biāo)系轉(zhuǎn)換寫成姿態(tài)矩陣形式[6],可知:

其中:
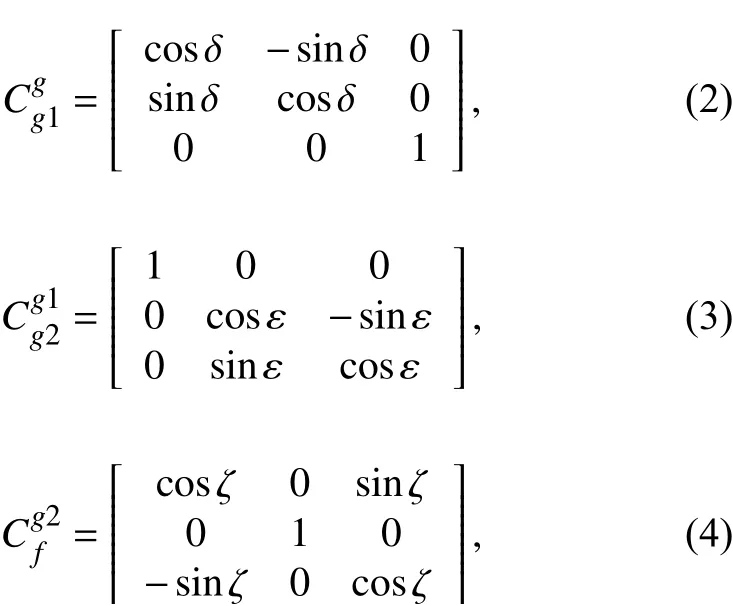
代入式(1),可得:
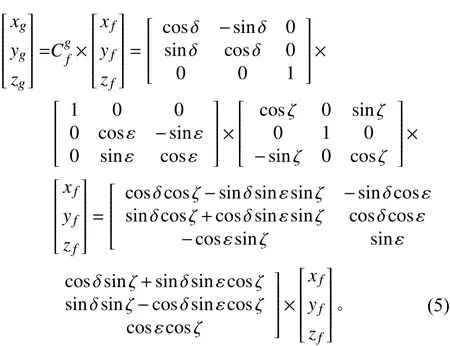
為了更加清晰、簡潔地描述捷聯(lián)慣組坐標(biāo)系與俯仰坐標(biāo)系之間旋轉(zhuǎn)變換的過程,將二者關(guān)系采用圖形化語言表示的PIOGRAM示意圖[7]如圖5所示。
圖5 捷聯(lián)慣組坐標(biāo)系到俯仰坐標(biāo)系變換對應(yīng)PIOGRAM圖Fig. 5 Transformation of PIOGRAM from SIMU coordinate system to pitching coordinate system
4 正交安裝誤差標(biāo)定方法研究
本文針對某艦載發(fā)射裝置捷聯(lián)慣組正交安裝誤差,基于平行光管(Collimator)原理,采用“陀螺尋北儀[8]+多棱鏡+瞄準(zhǔn)線檢查儀+電子差分水平儀”的綜合方法,在有限距離地理條件下[9],對捷聯(lián)慣組正交安裝誤差的全天候標(biāo)定方法進行研究。
4.1 偏航誤差δ標(biāo)定方法
為保證導(dǎo)彈武器系統(tǒng)在廠或船塢內(nèi)全天候標(biāo)定需求,本文提出一種在有限距離條件下,利用廠區(qū)或碼頭固定標(biāo)校點,對捷聯(lián)慣組在發(fā)射裝置上安裝后引起的偏航誤差進行標(biāo)定的方法。
如圖6所示,通過在發(fā)射裝置俯仰架側(cè)部基準(zhǔn)平臺上架設(shè)瞄準(zhǔn)線檢查儀,利用平行光管原理,實現(xiàn)與位于大地坐標(biāo)系中的陀螺尋北儀在測點A處進行互瞄,使陀螺尋北儀視軸在測點A處發(fā)射的激光束(LASER)穿過瞄準(zhǔn)線檢查儀的視鏡,與瞄準(zhǔn)線檢查儀的軸線重合。通過陀螺尋北儀在測點A慣性尋北后,可知瞄準(zhǔn)線檢查儀軸線(即導(dǎo)彈基準(zhǔn)軸線zf)在大地坐標(biāo)系xt-yt平面上的投影與水平北方向的夾角AFS。在發(fā)射裝置產(chǎn)品出廠時,俯仰架側(cè)部的瞄準(zhǔn)線檢查儀軸線與俯仰架上導(dǎo)彈基準(zhǔn)軸線之間的平行度誤差可通過“激光垂準(zhǔn)儀+標(biāo)準(zhǔn)靶標(biāo)”的方法進行標(biāo)定[2];在捷聯(lián)慣組頂部測量面上架設(shè)多棱鏡,通過捷聯(lián)慣組產(chǎn)品出廠前實驗室標(biāo)定,可將陀螺尋北儀視軸在測點B發(fā)射的激光束(LASER)折射后形成xgzx軸,使xgzx軸與捷聯(lián)慣組xg軸平行。在測點A處的陀螺尋北儀與發(fā)射裝置上瞄準(zhǔn)線檢查儀完成互瞄后,此時測點B處陀螺尋北儀的位置具有唯一性。
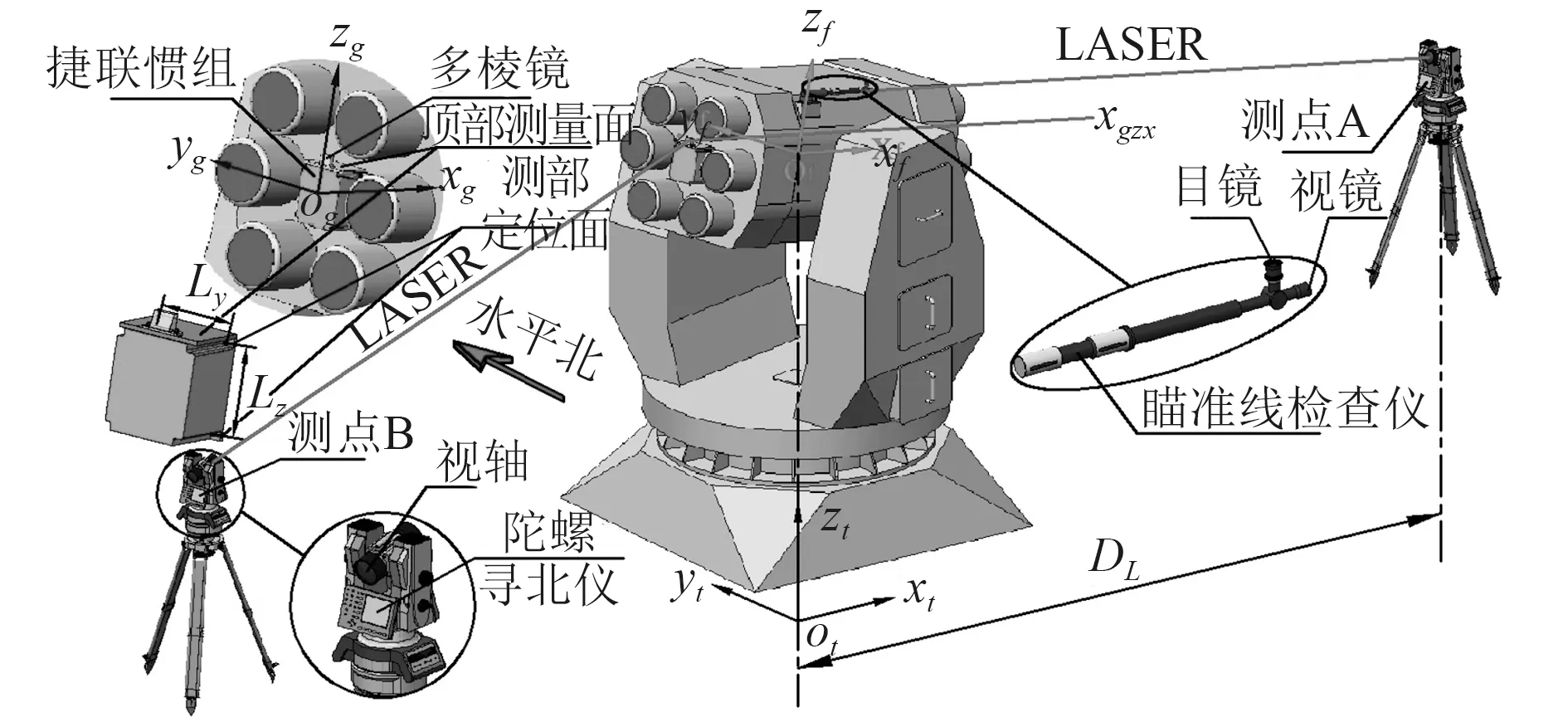
圖6 偏航誤差標(biāo)定方法示意圖Fig. 6 Diagram of yaw error calibration method
為確保測量結(jié)果有效性的同時,提高標(biāo)定效率,本文建議在發(fā)射裝置方位角α=0°,即方位坐標(biāo)系與基座坐標(biāo)系重合時,通過位于大地坐標(biāo)系中的陀螺尋北儀在測點B處慣性尋北后,從測點B處的陀螺尋北儀讀取發(fā)射裝置位于方位零位時,捷聯(lián)慣組xg軸在大地坐標(biāo)系xt-yt平面上的投影與水平北方向的基準(zhǔn)夾角AGZ0,后續(xù)可改變陀螺尋北儀測點A的方位角α以及測點A處的陀螺尋北儀與基座坐標(biāo)系原點的距離DL(DL可使用激光測距儀精確測量),通過多次測量排除偶然性,以便對數(shù)據(jù)進行科學(xué)、有效的分析。本文以圖6所示艦載發(fā)射裝置為例,其中0°≤AGZ0≤180°,對偏航誤差標(biāo)定的幾種工作狀態(tài)進行分析。
由圖7可知,上述幾種工作狀態(tài)條件下,捷聯(lián)慣組在發(fā)射裝置上安裝后產(chǎn)生的偏航誤差δ為:

圖7 偏航誤差標(biāo)定的工作狀態(tài)示意圖Fig. 7 Working state diagram of yaw error calibration

式中:AFS為導(dǎo)彈基準(zhǔn)軸線在大地坐標(biāo)系xt-yt平面上的投影與水平北方向的夾角,由測點A處的陀螺尋北儀讀取;AGZ0為發(fā)射裝置位于方位角α=0°時捷聯(lián)慣組的xg軸在大地坐標(biāo)系xt-yt平面上的投影與水平北方向的夾角,由測點B處的陀螺尋北儀讀取;α為發(fā)射裝置方位角且-180°≤ α≤180°,沿za軸向下看,順時針轉(zhuǎn)動為“+”,逆時針轉(zhuǎn)動為“-”,由發(fā)射裝置計算機讀取。
由于捷聯(lián)慣組安裝在發(fā)射裝置俯仰架后部,安裝面與俯仰架軸線xf的垂直度直接影響偏航誤差的數(shù)值。若測量得到的偏航誤差不滿足系統(tǒng)要求時,可根據(jù)測量數(shù)值的方向和大小,可在捷聯(lián)慣組yg軸方向左側(cè)或右側(cè)的安裝支腳處,通過增加適量墊片或適當(dāng)修銼等方式,進行偏航誤差安裝角度標(biāo)定,將偏航誤差控制在系統(tǒng)允許的誤差范圍之內(nèi)。偏航誤差調(diào)整量值Δδ為:

式中:Δδ為偏航誤差調(diào)整量值;Ly為捷聯(lián)慣組沿yg軸方向安裝支腳距離。
4.2 滾轉(zhuǎn)誤差ε標(biāo)定方法
鑒于俯仰架的空間約束條件,考慮到加工基準(zhǔn)引出以及測量儀器尺寸限制等原因,在發(fā)射裝置產(chǎn)品設(shè)計時,在回轉(zhuǎn)架上設(shè)計了基準(zhǔn)測量平臺,并與加工基準(zhǔn)嚴(yán)格保持一致,以此作為發(fā)射裝置總裝的測量和調(diào)整基線,主要用于方位坐標(biāo)系與基座坐標(biāo)系的水平度調(diào)整、俯仰坐標(biāo)系與方位坐標(biāo)系之間俯仰零位一致性和基準(zhǔn)彈位滾轉(zhuǎn)誤差調(diào)整等。在發(fā)射裝置總裝時,利用導(dǎo)彈安裝姿態(tài)測量工裝將俯仰架基準(zhǔn)彈位的滾轉(zhuǎn)誤差與回轉(zhuǎn)架上基準(zhǔn)測量平臺進行比對安裝調(diào)整,使得俯仰坐標(biāo)系中基準(zhǔn)彈位的滾轉(zhuǎn)誤差與方位坐標(biāo)系中基準(zhǔn)測量平臺上的對應(yīng)數(shù)據(jù)保持一致,實現(xiàn)俯仰坐標(biāo)系中基準(zhǔn)彈位滾轉(zhuǎn)誤差向方位坐標(biāo)系的轉(zhuǎn)換。
如圖8所示,為保證捷聯(lián)慣組架上安裝時的初始定位精度,在俯仰架上捷聯(lián)慣組預(yù)先安裝位置處設(shè)計止擋塊,通過產(chǎn)品出廠前標(biāo)定,實現(xiàn)止擋塊內(nèi)側(cè)定位面與俯仰坐標(biāo)系中xf-zf平面平行。安裝時捷聯(lián)慣組側(cè)部定位面與止擋塊內(nèi)側(cè)定位面貼合,賦予捷聯(lián)慣組在俯仰架上的初始定位精度。

圖8 滾轉(zhuǎn)誤差標(biāo)定方法示意圖Fig. 8 Diagram of roll error calibration method
考慮到實際標(biāo)定環(huán)境條件下存在船塢內(nèi)半坐墩情況[10],使發(fā)射裝置在動基座平臺上會出現(xiàn)微量的晃動。因此,為保證數(shù)據(jù)準(zhǔn)確性,本文采用具備相對傾斜動態(tài)測量能力的電子差分水平儀的測量方法。電子差分水平儀由電子水平儀A、電子水平儀B以及1臺差值比較顯示器組成,通過分別動態(tài)測量捷聯(lián)慣組頂部測量面沿捷聯(lián)慣組坐標(biāo)系yg軸方向和回轉(zhuǎn)架基準(zhǔn)測量平臺沿方位坐標(biāo)系ya軸方向(與圖8所示舷向刻線平行)的水平度,實時地顯示數(shù)據(jù)并進行差值比較,實現(xiàn)滾轉(zhuǎn)誤差的量化。另外,考慮到電子差分水平儀的使用方式和工作范圍,測量前應(yīng)將俯仰角β置于零位,即俯仰坐標(biāo)系與方位坐標(biāo)系重合,以提高測量數(shù)據(jù)的準(zhǔn)確性和可信度。
通過上述方法,若測量得到的滾轉(zhuǎn)誤差不滿足系統(tǒng)要求時,可采用與偏航誤差類似的調(diào)整方法,根據(jù)測量數(shù)值的方向和大小,在捷聯(lián)慣組zg軸方向上某一端的側(cè)部定位面與俯仰架上止擋塊內(nèi)側(cè)面之間,通過增加適量墊片或適當(dāng)修銼等方式,進行滾轉(zhuǎn)誤差安裝角度標(biāo)定,進而將滾轉(zhuǎn)誤差控制在系統(tǒng)允許的誤差范圍之內(nèi)。滾轉(zhuǎn)誤差調(diào)整量值Δε為:

式中:Δε為滾轉(zhuǎn)誤差調(diào)整量值;Lz為捷聯(lián)慣組沿zg軸方向兩端側(cè)部定位面之間的距離。
4.3 俯仰誤差ζ標(biāo)定方法
在發(fā)射裝置出廠前,在俯仰架側(cè)部基準(zhǔn)平臺上沿俯仰坐標(biāo)系xf軸方向以及回轉(zhuǎn)架基準(zhǔn)測量平臺上沿方位坐標(biāo)系xa軸方向(與圖9所示艏艉刻線平行),分別架設(shè)電子水平儀,通過驅(qū)動俯仰架沿yf軸旋轉(zhuǎn),使得2個電子水平儀的讀數(shù)相同,實現(xiàn)俯仰坐標(biāo)系與方位坐標(biāo)系重合,并以此時俯仰架的位置作為俯仰零位,保證捷聯(lián)慣組安裝后,捷聯(lián)慣組坐標(biāo)系、俯仰坐標(biāo)系和方位坐標(biāo)系之間的可靠變換。
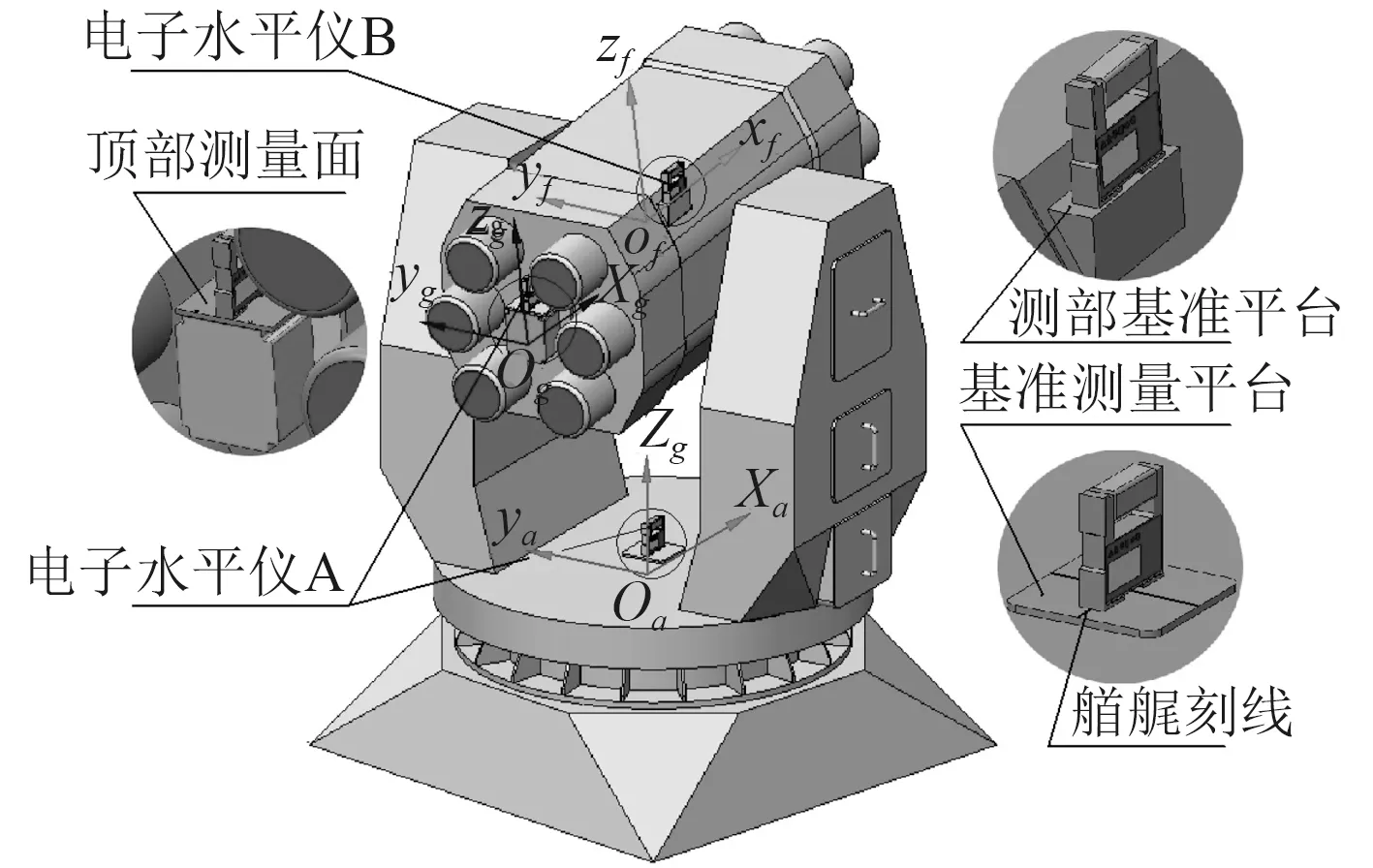
圖9 俯仰誤差標(biāo)定方法示意圖Fig. 9 Diagram of pitching error calibration method
俯仰誤差的標(biāo)定方法與前序章節(jié)中提出的滾轉(zhuǎn)誤差標(biāo)定方法的原理基本相同。如圖9所示,通過分別動態(tài)測量捷聯(lián)慣組頂部測量面沿捷聯(lián)慣組坐標(biāo)系xg軸方向和俯仰架側(cè)部基準(zhǔn)平臺沿俯仰坐標(biāo)系xf軸方向的水平度,實時地進行差值比較并顯示,實現(xiàn)俯仰誤差的量化。
由于捷聯(lián)慣組安裝在發(fā)射裝置俯仰架后部,安裝面與俯仰坐標(biāo)系zf軸的平行度直接影響俯仰誤差的數(shù)值。因此,在偏航誤差和滾轉(zhuǎn)誤差標(biāo)定完成后,若測量得到的俯仰誤差不滿足系統(tǒng)要求時,可根據(jù)測量數(shù)值的方向和大小,在捷聯(lián)慣組zg軸方向上側(cè)或下側(cè)的安裝支腳處,通過增加適量墊片或適當(dāng)修銼等方式,進行俯仰誤差安裝角度標(biāo)定,將俯仰誤差控制在系統(tǒng)允許的誤差范圍之內(nèi)。俯仰誤差調(diào)整量值Δζ為:

式中:Δζ為俯仰誤差調(diào)整量值。
4.4 正交安裝誤差統(tǒng)計方法
為衡量捷聯(lián)慣組正交安裝誤差的整體水平,本文采用均方根值(RMS)統(tǒng)計方法[2],將偏航誤差、滾轉(zhuǎn)誤差和俯仰誤差進行空間合成,得到捷聯(lián)慣組正交安裝誤差θ為:

式中,θ為捷聯(lián)慣組正交安裝誤差。
4.5 數(shù)據(jù)處理及分析
4.5.1 系統(tǒng)指標(biāo)要求
某艦載導(dǎo)彈武器系統(tǒng)對發(fā)射裝置上的捷聯(lián)慣組正交安裝誤差提出了技術(shù)要求,相關(guān)指標(biāo)如表1所示。其中,偏航誤差、滾轉(zhuǎn)誤差和俯仰誤差不大于10',正交安裝誤差不大于15'。
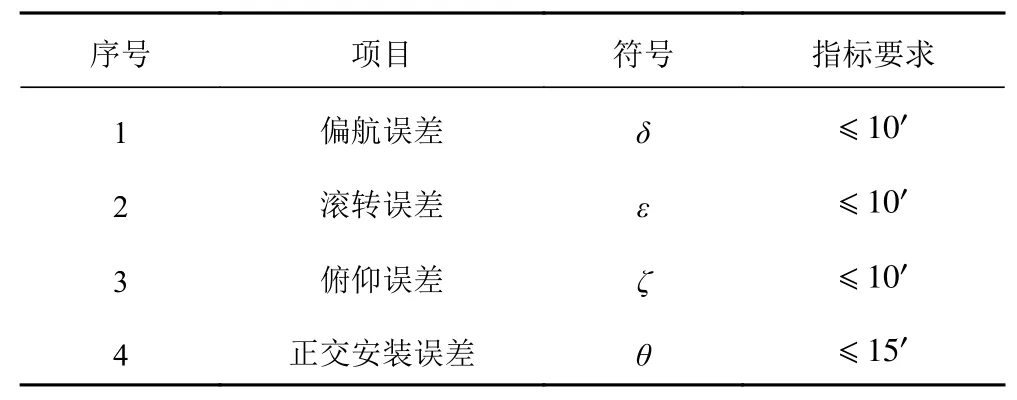
表1 正交安裝誤差指標(biāo)要求Tab. 1 Index requirements of orthogonal installation error
4.5.2 數(shù)據(jù)處理
按照本文提出正交安裝誤差的標(biāo)定方法,采用多位置、變距離測量手段,對發(fā)射裝置捷聯(lián)慣組正交安裝誤差進行標(biāo)定,數(shù)據(jù)結(jié)果統(tǒng)計如表2~表5所示。
4.5.3 結(jié)果分析
對表2~表5的數(shù)據(jù)結(jié)果進行分析可得:第一,在第1次測量偏航誤差時,DL取值在20~50 m距離范圍之間,使得表2中測得的偏航誤差數(shù)據(jù)超差嚴(yán)重,伴隨著測點A位置的變化,數(shù)值波動較大;同時隨著距離逐漸增加,偏航誤差的數(shù)值有明顯的減少。經(jīng)分析,出現(xiàn)此種現(xiàn)象的原因是陀螺尋北儀和瞄準(zhǔn)線檢查儀都是通過目視方式,將零位刻線置于瞄準(zhǔn)點幾何中心,距離越近,瞄準(zhǔn)點幾何尺寸越大,目視對準(zhǔn)的誤差越大。鑒于此,在第2次測量和標(biāo)定后復(fù)測時,將DL取值范圍增加至150 m以上,測得的偏航誤差數(shù)值趨于穩(wěn)定。另外,從第2次測量和標(biāo)定后復(fù)測數(shù)據(jù)中可以看出,在方位角α分別位于正向和負(fù)向位置時,偏航誤差出現(xiàn)一個約2'的固定差值,經(jīng)分析,這是由于發(fā)射裝置正反向運轉(zhuǎn)時,由于傳動鏈產(chǎn)生空回造成固有誤差,后續(xù)可以通過合理制定發(fā)射裝置關(guān)鍵部件的制造精度、優(yōu)化結(jié)構(gòu)設(shè)計以及減少誤差源等措施降低固有誤差的影響[2]。第二,由于捷聯(lián)慣組在發(fā)射裝
置上安裝時,采用了合理的側(cè)面定位方式,其中,止擋塊在發(fā)射裝置上的定位方式與架上導(dǎo)彈相同,使得表3測得的滾轉(zhuǎn)誤差符合指標(biāo)要求且數(shù)值較小,這也為后續(xù)產(chǎn)品設(shè)計提供了一種可行的設(shè)計方法。第三,鑒于某艦載發(fā)射裝置采用俯仰正角發(fā)射,同時考慮到電子水平儀使用范圍要求,因此表4中各測點選取的俯仰角β都為同向正值;測點1中電子水平儀B和A0測得的數(shù)據(jù)基本一致,說明發(fā)射裝置在出廠時完成了發(fā)射裝置高低零位一致性標(biāo)定,實現(xiàn)了俯仰坐標(biāo)系向方位坐標(biāo)系的可靠轉(zhuǎn)換,且符合度較高;另外,各測點電子水平儀B與相應(yīng)俯仰角β的差值接近某一定值,從一定程度上體現(xiàn)了發(fā)射裝置俯仰傳動系統(tǒng)傳動精度水平。因此,通過合理的誤差標(biāo)定方法和可靠的定位手段,使得表5中的捷聯(lián)慣組正交安裝誤差滿足了武器系統(tǒng)提出的指標(biāo)要求。

表2 偏航誤差數(shù)據(jù)處理結(jié)果Tab. 2 Data processing results of yaw error
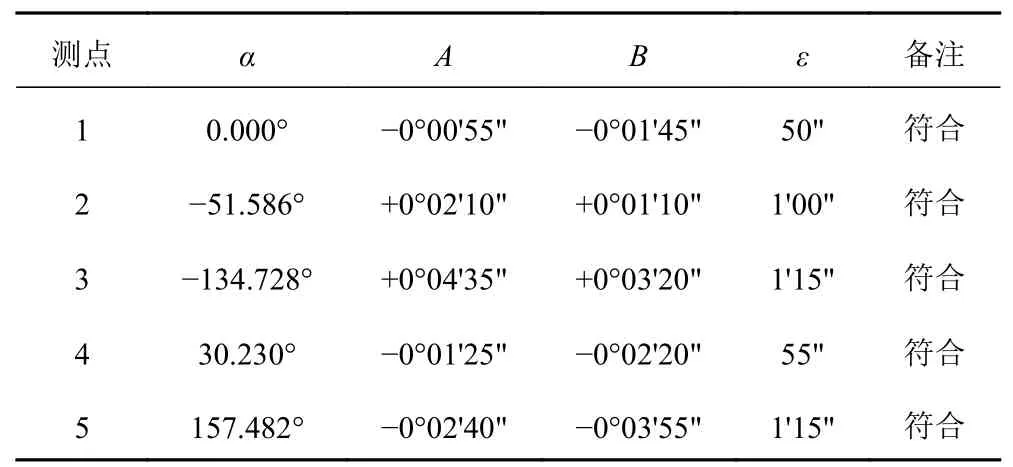
表3 滾轉(zhuǎn)誤差數(shù)據(jù)處理結(jié)果(β=0)Tab. 3 Data processing results of roll error (β=0)

表4 俯仰誤差數(shù)據(jù)處理結(jié)果(α=0)Tab. 4 Data processing results of pitching error (α=0)
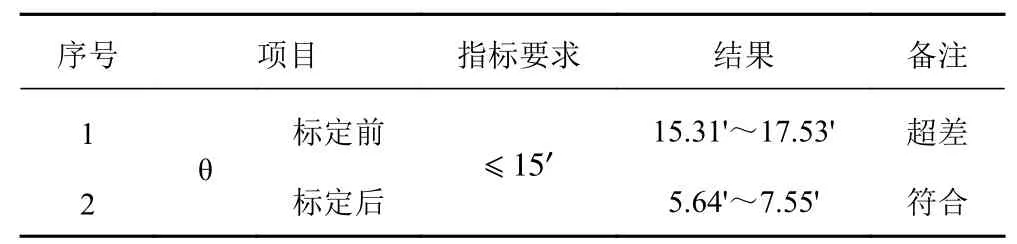
表5 正交安裝誤差數(shù)據(jù)統(tǒng)計結(jié)果Tab. 5 Statistical results of orthogonal installation error data
5 結(jié) 語
本文針對某艦載發(fā)射裝置上安裝的捷聯(lián)慣組設(shè)備,建立了空間坐標(biāo)系的幾何約束耦合關(guān)系模型,基于空間坐標(biāo)系變換概念,闡述了捷聯(lián)慣組正交安裝誤差的產(chǎn)生機理和誤差標(biāo)定原理;運用“陀螺尋北儀+電子差分水平儀等”組合標(biāo)定方法,對捷聯(lián)慣組在發(fā)射裝置上安裝產(chǎn)生的偏航誤差、滾轉(zhuǎn)誤差和俯仰誤差的標(biāo)定方法以及正交安裝誤差的統(tǒng)計方法進行了研究和數(shù)據(jù)分析,為捷聯(lián)慣組等高精設(shè)備在發(fā)射裝置上的安裝和標(biāo)定提供了一種工程應(yīng)用方法和思路;同時,對發(fā)射裝置等載體的總體設(shè)計和結(jié)構(gòu)優(yōu)化方面也具有一定的參考價值。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
