智能機器人巡檢系統安全性與應用性研究
2021-07-04 02:53:12郝育紅
煤炭與化工 2021年5期
郝育紅
(冀中能源峰峰集團 企管部,河北 邯鄲056107)
0 引 言
隨著經濟和科技的高速發展,我國電力生產化水平不斷提高,并向智能化的方向發展。變電站作為電網的核心部位,自動化水平也日益提高。隨著無人值守化的普及,變電站巡檢質量得到重視,傳統的巡視方式已不能滿足現代化變電站發展的要求。
智能機器人巡檢系統在變電站中的科學合理應用,打破了傳統人工巡檢的局限性,取得了良好的應用效果,提高了設備運行維護人員的工作效率和巡檢質量。
智能機器人巡檢系統在一定程度上取代了人工的巡檢工作,有效的推進了變電站無人值守的進程,智能機器人代替人工巡視,將是未來的主要發展方向。
1 變電站巡檢技術分析
1.1 傳統變電站巡檢分析
變電設備巡視是保證變電站安全運行的一項重要制度。傳統變電站設備的巡視是由值班運行人員在現場進行的。
變電站的值班員在進行人工巡檢時,主要是通過看、觸、聽、嗅等感官對運行中的設備進行感觀的、簡單的定性判斷,并采用手工紙介質記錄的工作方式。
人工巡檢時受人員的生理、心理素質、責任心、外部的工作環境、工作經驗和技能技術水平的影響較大,會存在漏巡、漏發現和記錄信息偏差的可能性。
巡視人員巡視設備時,需要站在離設備較近的地方,這樣會危害到巡視人員的人身安全。
綜上所述,無人值班變電站的人工巡檢存在及時性、可靠性差,管理成本高,無法準確考核巡檢人員工作狀態,巡視效率低下等明顯缺陷。
隨著無人值守變電站的普及,對變電站巡檢要求也逐漸提高,傳統人工巡檢已不能滿足未來變電站巡檢的要求,改革傳統落后巡檢方式勢在必行。
1.2 智能機器人巡檢系統
變電站巡檢系統中所采用的智能機器人是由多傳感器融合技術與機電一體化技術、導航與行為規劃技術、安防技術、無線傳輸技術等多種現代化先進技術集成應用設計實現的。
智能機器人在變電站工作中能夠通過完全自主或遙控操作模式,替代傳統人工巡檢方式,對變電站各設備及有關項目進行巡檢。
巡檢內容包括設備溫度、設備外觀、開關分合狀態、儀表等,具有檢測方式多樣化、智能化、巡檢工作標準化、客觀性強等特點。
巡檢系統集巡視內容、時間、路線、報表管理于一體,并在圖像分析及判斷基礎上,對變電站運行中出現的故障問題和異常情況進行快速捕捉和及時上報,為無人值守變電站的建設與推廣應用提供技術支持,進而促進電網的穩定與可靠的運行。
相比傳統的人工巡檢方式,智能機器人巡檢系統主要有以下優勢:
(1)通過視頻模塊,實現對設備狀態的監測,操作前后狀態的核對等業務功能,減輕工作人員的勞動強度,提升巡檢的效率,降低變電設備的運行及維護成本,節省大規模安裝固定攝像頭的采購和維修的成本。
(2)巡檢系統采用數字化處理方式,在保證數據時效性的同時,實現標準統一和描述統一,從而提升了系統的智能化水平和信息化管理水平,減少了管理成本。
2 智能機器人巡檢系統的特點
2.1 系統組成
智能巡檢機器人管理系統分為過程感知層、主控管理層和遠程系統層。
(1)過程感知層
過程感知層是智能巡檢機器人搭載高清攝像機、紅外熱成像儀、音量探測器、溫濕度傳感器等設備,對變電站設備的健康狀態進行精準采集,監控感知變電站設備及環境狀態。
(2)主控管理層
智能機器人采集的設備狀態數據,實時傳輸至機器人后臺,所監控的數據可進行移動平臺的智能共享,使得數據管理和傳輸更加便捷、安全、智能。
(3)遠程系統層
數據與調度部門實時遠程共享,并輸出相關設備的缺陷診斷報表,為決策層提供決策依據,實現了數據更加可靠,更加智慧。
2.2 系統特點
智能巡檢機器人管理系統具有巡檢自主化、導航無軌化、視頻監控智能化、圖像識別精準化、異常處理功能、環境實時監測、自主供電系統、網絡通信系統等多種優勢。
2.2.1 巡檢自主化
智能機器人可替代人工進行日常的巡視和檢測工作,具有自動巡檢的功能。機器人按照每日規劃的巡視和檢測任務,根據預先設定的巡檢點的位置,沿著預定的軌跡,依次進行自動巡檢,實現了變電站信息檢測的全覆蓋、全檢測。
智能巡檢機器人開展的巡視和檢測工作系統也支持定點或定任務巡檢。只需通過后臺系統,選擇想要進行巡視的巡檢點,向機器人派發臨時巡檢任務,機器人就會按照選擇的任務內容,規劃出最優的巡視路徑,即可完成巡檢任務。
2.2.2 導航無軌化
巡檢機器人無軌化導航方案是通過機器視覺相機的導航系統實現的。巡檢機器人進入巡檢環境之前,預先設計好巡檢路徑,并在固定的巡檢點粘附二維碼以形成巡檢路線。當進入巡檢環境后,再進行地圖數據的同步,即可開始執行巡檢任務。
2.2.3 視頻監控智能化
智能巡檢機器人系統搭載的高清攝像機,采集實時的現場圖像,并經過無線網絡系統進行實時傳輸,并設置網絡中繼以保證視頻不丟包,不失真,最大范圍的進行設備及環境的監控。
智能巡檢機器人管理系統平臺可實現視頻存儲、分發、系統配置、實時監視、信息發布、視頻查詢、視頻回放、實時控制、抓圖、抓錄等多種功能,真正實現了智能巡檢機器人視頻監控的智能化管理。
2.2.4 圖像識別精準化
智能巡檢機器人系統針對不同設備圖像對象(指針類、分合類、文字類等),采用不同算法進行分類特征提取,保證訓練特征的穩定性,進行分類識別,識別數據結果,實時輸出。2.2.5 異常處理功能
變電站中應急事故主要是指設備發生停電、起火、爆炸等嚴重威脅變電站設備財產安全和巡檢人員人身安全的生產事故。
發生以上事故時,可以利用機器人作為前鋒,第一時間深入現場,利用移動高清視頻,協助運維人員觀察設備的實際狀況。
利用機器人實時傳送現場信息,有利于組建遠程網絡專家的聯合分析隊伍,加強設備疑難缺陷分析的實時性,便于人員在遠方快速了解現場情況,掌握現場動態。
通過機器人排查其他設備,快速掌握設備的故障情況,及時確定處理方案,從而保障人員的人身安全。
2.2.6 環境實時監測
智能機器人具有可見光攝像機等設備,并能將所采集的視頻上傳至監控后臺。工作人員可通過上位機軟件操作監控系統移動到指定位置,控制云臺自由轉動,實現近距離地觀察和拍攝目標物體,將監控范圍覆蓋到盲區。
機器人可對周圍環境進行視頻圖像的采集,并根據工作人員的需要,將圖像信息經網絡傳回運維班組,并自動記錄拍攝地點和設備的名稱,以備工作人員日后能查詢完整的信息。
2.2.7 自主供電系統
智能巡檢機器人采用220 V交流供電,在現場進行選擇相關便于取點的位置,布置機器人的充電裝置。
在執行任務過程中,機器人實時監測電量情況,如出現電量過低,則自主觸發返航充電任務,并發出電量過低的警告。
智能巡檢機器人返航至充電位置,執行自主充電任務,并確認是否充電成功,如未充電成功,則重復執行充電任務,待充電完成后,繼續執行巡檢任務。
2.2.8 網絡通信系統
過程層智能巡檢機器人搭載智能感知傳感器,通過無線傳輸至局域網,再通過主控終端接入管控平臺。
3 智能機器人巡檢系統在變電站的實際應用
電業分公司首先在35 kV梧桐莊變電站、北大峪變電站進行了實際應用。
針對梧桐莊變電站現場布置情況以及功能需求,采用一套室內輪式智能巡檢機器人,進行主控室與6 kV高壓室全覆蓋,通道門在機器人運行時處于常開狀態,實現設備狀態智能化管控,數據實時共享。考慮到由于35 kV高壓室區域,每個柜體外表設備數據較少,且與6 kV高壓室不在同一個區域,布置一套機器人的性價比較低,所以不在該區域布置機器人。
針對北大峪變電站現場布置情況以及功能需求,采用一套室內輪式智能巡檢機器人,進行6 kV高壓室2個室全覆蓋,通道門在機器人運行時處于常開狀態。實現了設備狀態的智能化管控,數據實時共享。
3.1 巡檢任務內容
智能巡檢機器人巡檢任務包括以下內容:
(1)內屏柜外觀檢查;(2)開關運行指示燈、數字顯示、投退狀態;(3)刀閘遙控狀態;(4)開關量模塊檢修狀態;(5)溫濕度控制器溫度、濕度顯示;(6)遠方/就地切換把手狀態;(7)帶電顯示器電源顏色;(8)帶電顯示器閉鎖顏色;(9)室內溫濕度監測。
3.2 路徑規劃
35 kV梧桐莊變電站機器人路徑規劃如圖1所示。
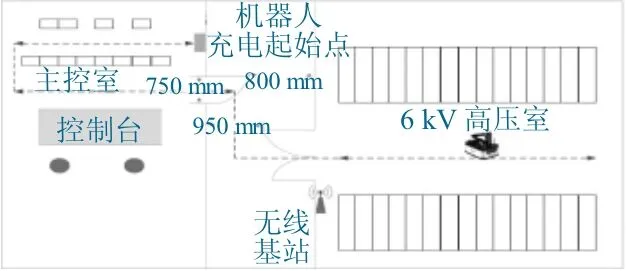
圖1 35 kV梧桐莊變電站機器人路徑規劃Fig.1 Path planning of robot of 35 kV Wutongzhuang substation
35 kV北大峪變電站機器人路徑規劃如圖2所示。
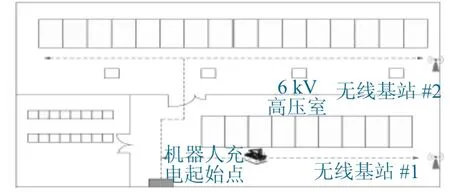
圖2 35 kV北大峪變電站機器人路徑規劃Fig.2 Path planning of robot of 35 kV Beidayu substation
3.3 室內智能巡視解決方案
以室內機器人移動巡檢為主,搭載可見光攝像機、溫濕度采集設備等傳感器,同時具備自動升降功能,可對設備及環境狀態進行全面監測。
室內巡視方案由機器人、監控系統、機器人充電樁、通信基站等4大部分組成。
機器人巡檢可有效地替代巡檢人員進行繁瑣、重復的巡檢任務,可及時發現高壓室二次設備的隱患和缺陷;充電是供機器人完成自主充電;機器人通信基站用于機器人與監控系統間數據通信的網絡設備。
3.4 充電樁布置方式
智能巡檢機器人采用220 V交流供電,在現場進行選擇相關便于取點的位置,布置機器人充電裝置。在執行任務過程中,機器人實時監測電量情況,如出現電量過低,自主觸發返航充電任務,并發出電量過低的警告;返航至充電位置,執行自主充電任務,并確認是否充電成功,如未充電成功,則重復執行充電任務,待充電完成后,繼續執行巡檢任務。
3.5 工作站布置方案
智能機器人系統工作站和服務,均布置在主控室工作臺的位置,便于工作人員操作,同時對設備狀態進行實時監控。
4 結 語
智能機器人巡檢系統已在變電站中進行了實際應用,該系統將逐漸取代運行人員完成變電設備的日常巡視、紅外測溫、操作前后設備狀態檢查等工作,不僅實現了設備巡視工作的無紙化和信息化,提高了設備巡視的工作效率和質量,降低了運行人員的勞動強度和工作風險,同時,提升了變電站的智能化水平,為變電站無人值守提供了更先進的技術支撐平臺。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
