基于LQR/PID控制飛機俯仰角的仿真研究
2021-07-07 10:54:36李衛衛
沈陽化工大學學報 2021年1期
李衛衛,李 凌
(沈陽化工大學 信息工程學院, 遼寧 沈陽 110142)
飛機在空中飛行時,飛行參數會受到高度、馬赫數的影響,而且俯仰姿態也會發生變化.因此,為使飛機能夠平穩飛行就需要設計合適的控制器.現階段國內外有很多對飛機俯仰姿態的研究,現代飛機的設計主要依靠自動控制系統來控制飛機各個子系統.自動控制系統的進步在飛機的發展中發揮了重要作用.通常,飛機的飛行運動包含3個旋轉運動和3個平移運動,飛機的控制策略可分為橫向控制和縱向控制[1].其中,俯仰控制是一種縱向控制,因此可以采用飛機縱向模型設計飛機的俯仰角控制器.在縱向控制中,俯仰角被控制,飛機的俯仰可以看作繞側軸旋轉,它是水平線上的速度方向與垂直平面之間的夾角,另外,偏轉角用于控制位于飛機后部的俯仰.在過去,許多研究人員做過控制飛機的俯仰、滾轉和偏航以穩定飛機的研究工作,這一課題至今仍是一個具有挑戰性的問題[2-3].針對飛機俯仰姿態以及俯仰角的控制已經有多種方法,例如基于遺傳算法的LQR和PID控制器[4],模糊PID控制[5],GA調諧LQR和PID控制器[6],混合EKF和NDO的魯棒自適應控制器[7],串級 PID 控制方案所設計的P-PID和PD-PI控制器[8],H∞控制理論應用于飛機俯仰角控制系統的設計[9]等.
本文主要介紹了飛機俯仰角的基本控制方法LQR控制器和PID控制器.LQR控制響應速度快,跟蹤性能好,在LQR的設計中,可手動調節增益k的值,使性能指標J被優化,但是會存在不確定性,這時將預補償器加入控制回路中,利用MATLAB仿真對LQR控制器進行整定,得到了控制器Q矩陣的最優值,主要目的是減少上升時間、穩定時間和峰值超調.在PID控制器設計中,通過P,PI,PID仿真結果分析對比,可發現PID控制器的控制回路結構簡單,當系統中出現擾動時,PID控制器可使系統平穩,并且通過參數整定可使上升時間和調節時間加快,穩態誤差和超調量都減小.以飛機的俯仰角為輸出,在MATLAB環境下對這兩種控制方案進行仿真分析并與原系統進行比較,討論2種控制策略對飛機系統性能的影響,給出了飛機俯仰角響應的MATLAB仿真結果,并以飛機俯仰角響應的上升時間、峰值超調和穩態誤差為指標進行性能測試.
1 系統建模
飛機運動方程是一組非常復雜的6個非線性耦合微分方程組,而且飛機俯仰角的模型是時變、非線性的.假設飛機的速度和高度是恒定的,而且俯仰角的改變不會影響飛機的速度,它們可以解耦并線性化為縱向和橫向方程.飛機俯仰受縱向動力學控制,這里將設計一個自動駕駛儀來控制飛機的俯仰.
如圖1所示,假設重力、阻力、升力和推力在x,y方向上,并且在高空飛行時俯仰角的改變不會影響飛機的速度.文中主要研究飛機的俯仰角θ以及偏轉角δ,通過推導[10]可得出飛機的縱向運動方程:
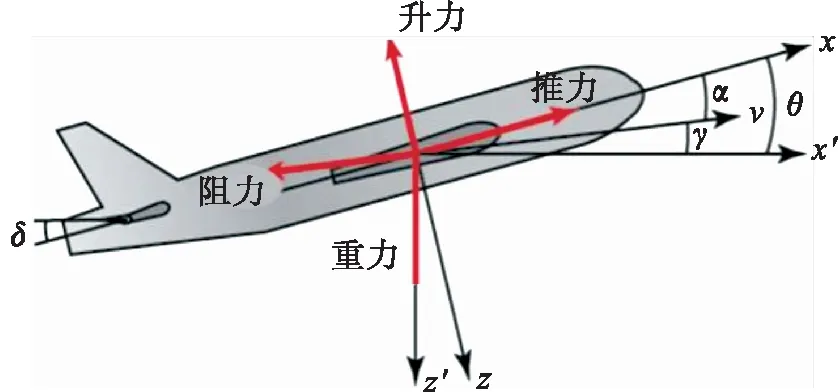
圖1 飛機受力分析Fig.1 Aircraft force analysis
(1)
[CM+σCM(1-μCL)]q+
(ηCWsinγ)δ],
(2)

(3)

(4)

(5)
(6)
在零初始條件下,經過拉普拉斯變換可以得到傳遞函數:
(7)
將其整理成狀態空間模型:
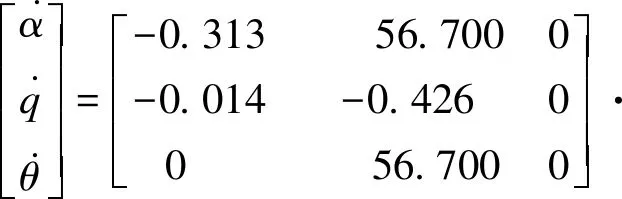
(8)
(9)
根據狀態空間模型(8)、(9),通過SIMULINK搭建出控制對象,在開環狀態下,當輸入為一個階躍響應時,其輸出如圖2所示,由圖2可見,俯仰角是沒有趨于穩定值的,即系統是不穩定的.而為了使飛機能夠平穩的飛行,將設計反饋控制形成閉環,使飛行中實際俯仰角的控制能夠滿足表1中各個參數的基本要求.
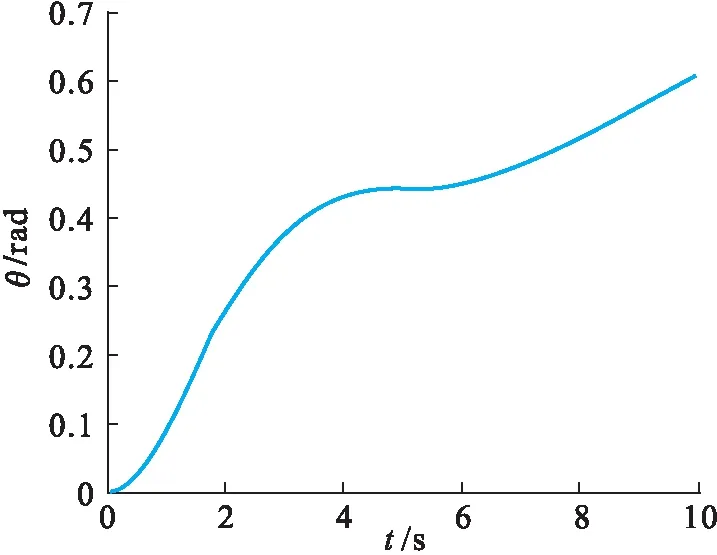
圖2 開環階躍響應Fig.2 Open-loop step response
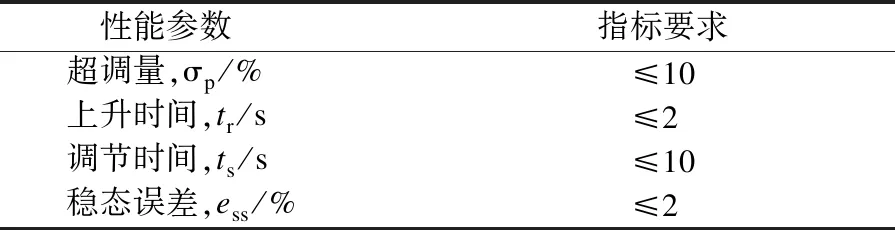
表1 性能指標要求Table 1 Performance requirement
2 控制器設計
2.1 LQR控制器

(10)
線性定常系統可通過狀態反饋控制實現n個極點任意配置的充要條件是被控系統∑0(A,B,C)態完全能控.通過驗證rank[B,AB,A2B…An-1B]即rankQc,或用MATLAB環境編寫命令,若滿秩則為完全能控.系統的能控矩陣是3×3,經計算秩為3,則系統可控,可以設置一個全狀態反饋控制系統(見圖3)實現極點的任意配置.
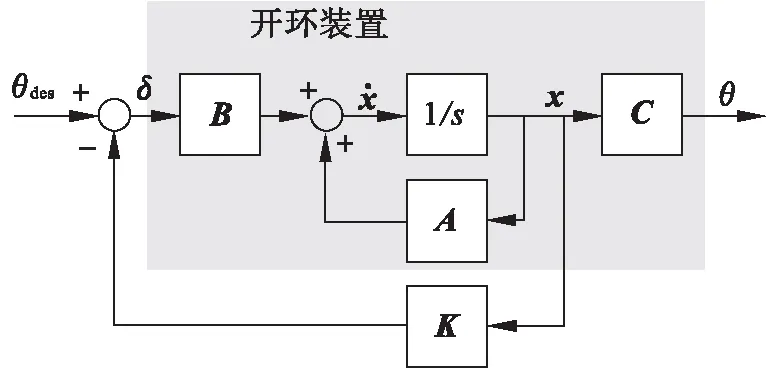
圖3 全狀態反饋系統原理Fig.3 Full state feedback system schematic diagram
2.2 PID控制器
圖4為控制系統的基本結構,其中PID控制器[13]的傳遞函數為
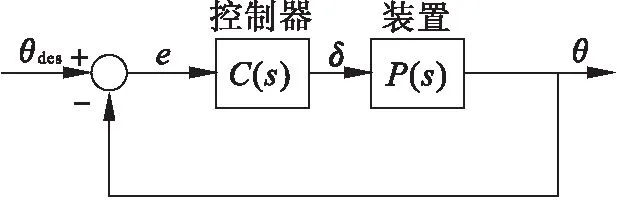
圖4 系統結構模型Fig.4 System structure model
(11)
通過MATLAB仿真觀察輸出響應,判斷PID是否滿足飛機俯仰角的4個性能要求.
首先,加入P控制器C(s)=Kp,可以提高系統的開環增益,減小系統的穩態誤差從而提高系統的控制精度.設定參考階躍響應為0.2 rad,設置比例系數Kp=1,判斷此時所產生的波形是否穩定.若不穩定,需要多次反復檢驗.若是控制器滿足了上升時間穩態誤差以及超調量的要求,但是調節時間過大,此時需要在控制器中加入微分或積分項以加快響應滿足要求.
3 系統仿真研究
假設飛機是在恒定的速度以及高度下駕駛,而且飛機俯仰角θ的改變不會影響飛機的速度,通過SIMULINK設計一個自動駕駛儀,采用LQR控制以及PID控制對比分析效果.為使飛機能夠平穩駕駛,對θ進行研究,使其滿足超調小于10 %,上升時間小于2 s,調節時間小于10 s,穩態誤差小于2 %.
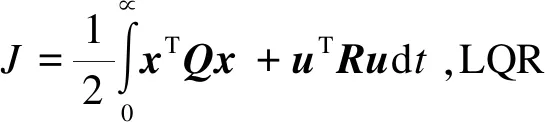
3.1 LQR控制器
建立SIMULINK[14]閉環狀態下的模型觀察響應是否滿足要求.在模型的建立中,階躍響應終值設置為0.2,狀態空間模塊使用飛機狀態空間模型的參數.作為單入單出系統,示波器顯示的是飛機俯仰角θ的變化.
圖5所示為閉環控制系統結構,在開環系統的基礎上增加一個反饋控制增益,這個增益由線性二次調節器LQR[15]設計,可以先使用Riccati方程求解,或用MATLAB環境lqr命令,具體值K=[-0.643 5,169.695 0,7.071 1],此時示波器所產生的波形如圖6所示.由圖6可以看出飛機俯仰角θ是穩定的,調節時間、上升時間、超調量都滿足要求,但存在穩態誤差,需要在閉環系統的基礎上添加預補償器,如圖7所示.
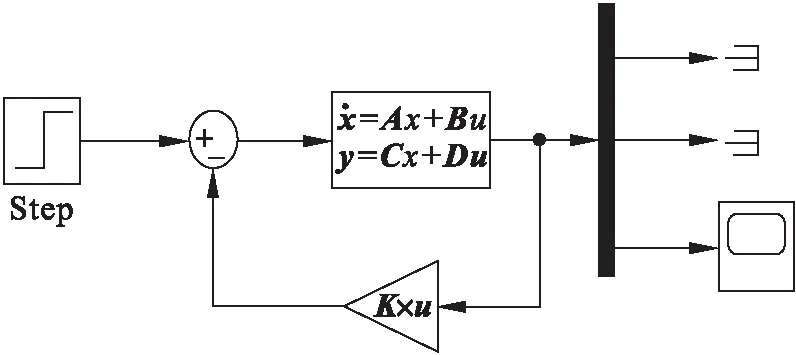
圖5 閉環控制系統Fig.5 Closed-loop control system
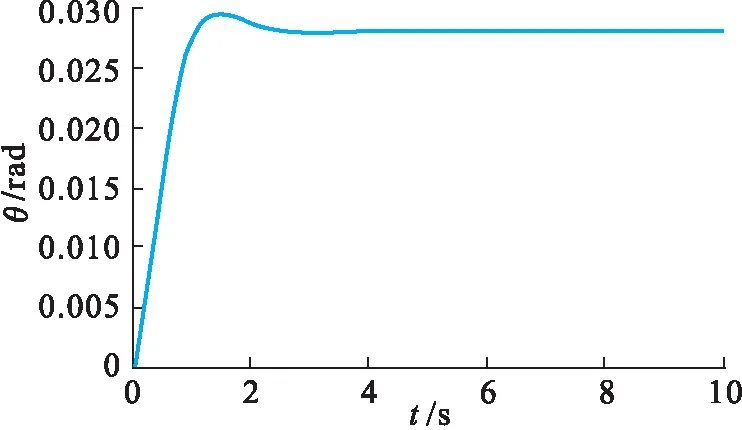
圖6 閉環階躍響應Fig.6 Closed-loop step response
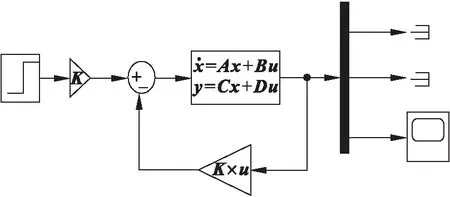
圖7 添加預補償器Fig.7 Added pre-compensator
在線性二次調節之后,穩態誤差過大,需要縮放基準輸入,使輸出在穩態下等于基準.其中縮放因子可以通過MATLAB用戶自定義函數自動生成,在這里縮放因子N=7.071 1.此時,波形如圖8所示,俯仰角θ超調量為5 %,上升時間為1.15 s,調節時間為2 s,穩態誤差為0.2 %,滿足各項要求.
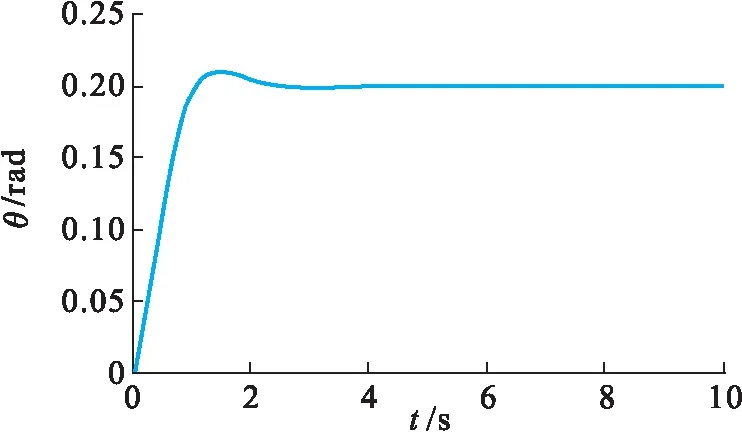
圖8 預補償后輸出θ波形Fig.8 Waveform output after adding pre-compensator
3.2 PID控制器
因為預補償器是根據被控對象的模型計算的,而且位于反饋回路之外,所以預補償器存在弊端.當系統存在誤差或未知擾動時,預補償器不能將其校正,會存在穩態誤差.為了消除誤差,需要添加PID控制器[16]進行自動整定.
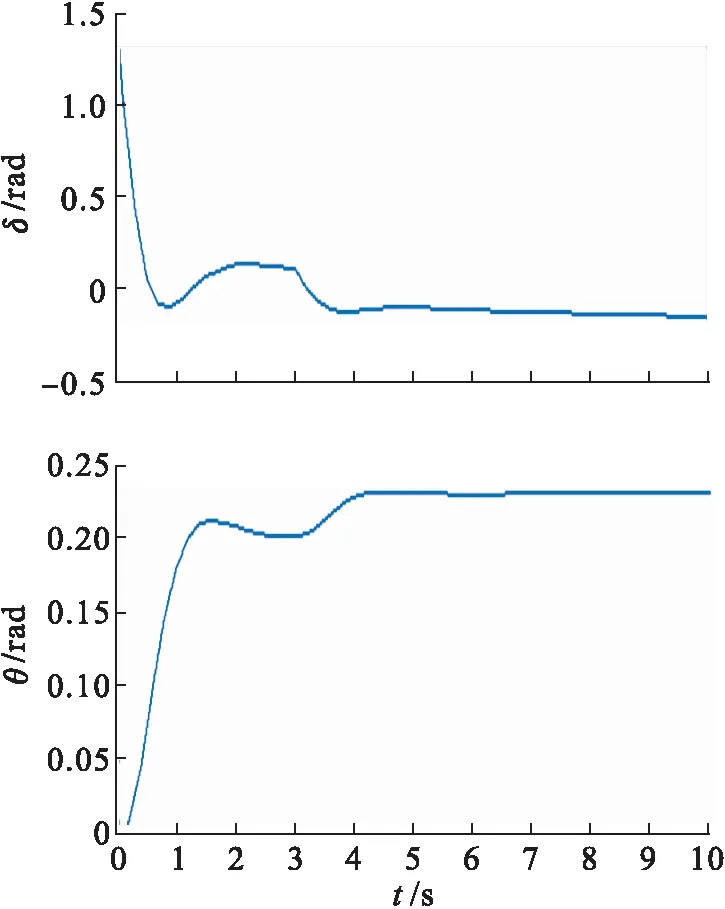
圖9 添加擾動后波形Fig.9 Added disturbance waveform
將LQR控制器與PID控制器的控制效果進行對比分析,如表2(表2的參數值是由圖6、圖8和圖10的波形分析計算得出)所示,與閉環控制系統相比,在PID控制器以及LQR控制器下的飛機俯仰角的控制系統的確能夠較好地消除飛機在飛行中受到干擾時的俯仰角偏差,縮短飛機在飛行中趨向穩定的時間,加速響應,減少了上升時間,并且LQR與PID相比較效果更好.
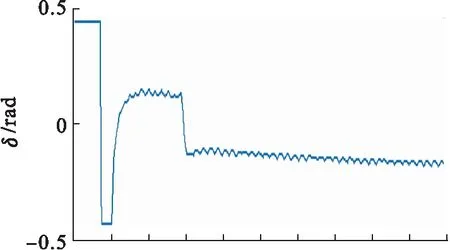
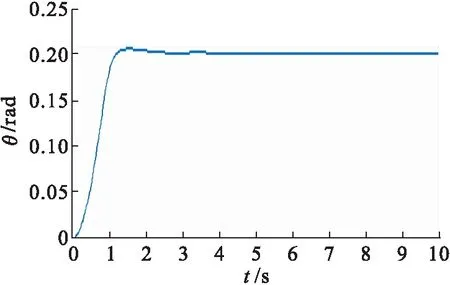
圖10 PID系統產生波形Fig.10 Waveform generated by PID system
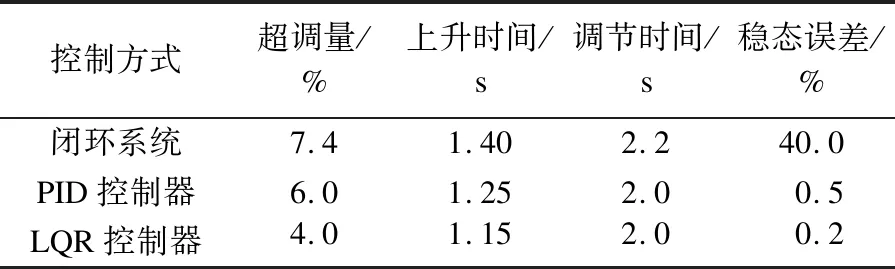
表2 性能指標對比Table 2 Comparison of performance indexes
4 結 論
由于周圍環境等諸多因素,飛機會受到干擾和噪聲的影響,從而導致系統的振動、穩態誤差和響應時間的延長.本文通過設計LQR控制器和PID控制器來實現對原系統的控制,LQR控制器提供了最小的可能振動和更好的響應速度,它需要加入預補償器縮放輸入基準;為了測試PID控制器的性能,要通過添加擾動來實現.
在2種控制方法中,PID控制器的控制效果稍差一些,由于PID控制器的比例、積分、微分參數靠經驗或者多次實驗獲得,當系統性能發生變化或者遇到干擾后,整定的參數不一定適用,但PID控制器因具有結構簡單、設計原理易于掌握和魯棒性強等優點,廣泛應用于工業控制中.LQR控制器是通過對系統進行局部線性化的方法進行控制的,其抗干擾性和魯棒性效果較好,LQR控制器比PID控制器能更好地實現對俯仰角的控制,具有響應快,超調小,穩態誤差小的優勢,能夠更好地滿足要求,使飛機處于平穩狀態,飛行更加舒適安全.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16